一种工件内部超声声线路径模拟算法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明属于超声检测算法技术领域,具体地说,涉及一种工件内部超声声线路径模拟算法。
背景技术
超声相控阵技术是无损检测技术领域的前沿技术,近几年发展迅速,已被广泛应用于石油、化工、冶金、造船、航空、航天等各个领域。各个领域内使用的工件不仅仅有我们常见的平板、管道,还有其他如弯头、法兰、角接接头、TKY、角焊缝、路轨等异形工件。这些工件结构复杂,探头摆放位置不是在单一水平面上,各个反射边缘不再是单纯的水平面或垂直面,而是存在斜面、圆弧面等,其各种类型的平面及曲面组合而成。
对于这些异形结构,我们需要根据其声线覆盖情况对其进行超声检测工艺制定,对采集到的超声图像进行缺陷判定。
目前,对于这类的超声检测,一般使用取形规获取工件检测面的形状轮廓,在纸上将形状描绘出来,在根据获取图像的回波声程,根据摆放位置及探头角度,在纸上手工绘制声线,并对缺陷进行判定。这类判定方法比较麻烦,当工件不同位置的形状轮廓不一样时,需要多次获取检测面的形状轮廓。例如,TKY或角接接头这类工件,由两个圆管斜插或直插组成,由于两个圆管之间的焊缝形状为马鞍状,需要以支管为中心分为12个分区进行检测,各个分区的形状轮廓各不一样。NB-T 47013.3-2015附录N不同类型焊接接头超声检测的具体要求里头列出了承压设备常见的几种结构件的检测要求,里头探头摆放位置各不相同,声线的覆盖情况也不一样。
发明内容
本发明的所要解决的技术问题在于提供一种可以适用于各种形状的工件,能够快速的对各种工件尤其是异形结构的工件进行声线仿真,满足对工件缺陷进行快速判定的工件内部超声声线路径模拟算法。
本发明解决上述技术问题的技术方案为:
一种工件内部超声声线路径模拟算法,包括如下步骤:
工件模拟,依据工件的外形,将工件的外观结构信息输入处理终端,模拟出电子化的工件形状;
工件标注,对电子化的工件形状进行标注,将反射线段标注为L
Ii声线检测起点确定,按照实际检测时,超声探头的放置位置,在处理终端中进行标注,确定晶片对应的虚拟位置P0,在通过超声探头发出Ii声线的声线角度Ai,通过斯涅尔定律反推出探头晶片对应Ii声线的入射角度Ai’,通过晶片位置P0与Ii声线的入射角度Ai’,计算Ii出声线从晶片发出到探头楔块的表面交点P0’,通过P0与P0’所在直线与反射线段的交点的第一个满足误差参数δ1、δ2的点,确定为Ii声线检测起点P1;
Ii声线工件内部入射角度确定,通过Ii声线角度Ai与Ii声线检测起点P1,计算Ii声线所在直线与反射线段的交点,根据折射定律,按照不同工件材质不同的折射率,确定Ii声线在工件内部入射角度Bi;
获取第一反射交点,依据初始折射角度Bi折射出的Ii声线,计算将折射角度Bi作为入射角度,折射出的Ii声线与反射线段的第一反射交点P2,通过反射定律,确定Ii声线的反射角度Ci;
形成Ii声线模拟图,依据获取第一反射交点步骤,将每次获得的反射角度Ci作为新的入射角度,重复计算Ii声线与反射线段的交点Pj,直至反射声线落在非反射线段或达到X次回波数时,停止算法,将若干交点Pj依次连线,获得完整的Ii声线模拟图;
完整模拟图,将晶片发射出的若干声线依据Ii声线检测起点确定、Ii声线工件内部入射角度确定、获取第一反射交点、形成Ii声线模拟图的步骤依次进行,获得若干副声线模拟图,将若干副声线模拟图进行叠加获得完整模拟图。
具体的,所述误差参数δ1为声线与探头楔块表面的交点P0’到工件表面的交点P1的最大容忍误差值;所述误差参数δ2为计算声线与线段交点P1时,当P1与线段不相交但与线段所在直线相交,则线段与直线的相交点与线段的距离的最大容忍误差值。
具体的,所述获取第一反射交点的步骤中,还包括有如下步骤:
判断相邻作用线段角度Z,作用线段为对Ii声线起反射作用时反射点所在的反射线段,相邻作用线段为最接近两个对Ii声线起反射作用时反射点所在反射线段,将相邻作用线段分别记为Li与Li+j,当Li与Li+j平行时,Ii声线均匀反射,此时相邻作用线段角度Z=180°,当Li与Li+j直接相交时,处理终端读取通过工件标注步骤中标注的Li与Li+j的角度Xi,此时相邻作用线段角度Z=Xi,当Li与Li+j不直接相交时,处理终端直接通过Li与Li+j延长的交点并读取通过工件标注步骤中标注的Li、Li+j以及两个线段之间夹持的若干线段对应的角度,计算出Li与Li+j的角度Yi,此时,相邻作用线段角度Z=Yi;
获得Ii声线的反射角度Ci,当Z=180°时,反射角度Ci与入射角度Bi相等,当Z=Xi或Yi是,线段Li与Li+j的交点与两个对应的反射点组成一个三角形,通过三角形内角和为180°的原理,结合Li与Li+j的角度以及Ii声线的入射角度Bi,获得Ii声线的反射角度Ci=90°-(180°-Xi/Yi-(90°-Bi))。
具体的,所述工件标注步骤中对工件的标注通过特定工件计算方法计算或通过工程图纸转换获得对应的标注数据。
具体的,所述反射线段为实际检测时要求工件发生反射的对应面经过工件模拟步骤形成的模拟线段,所述非反射线段为实际检测时不需要工件发生反射的对应面经过工件模拟步骤形成的模拟线段。
本发明具有以下有益效果:将工件转换成多线段后通过声线的折射与反射原理对声线在工件或异型工件内的路径进行仿真,确定声线的路径,并通过实际检测时超声回波反馈回来处于某个声程的缺陷,依据仿真结果找到缺陷对应的工件位置,从而实现对工件缺陷位置的精准定位,实现对工件乃至异性工件快速缺陷定位的目的。
附图说明
图1为本发明探头楔块的表面交点P0’的位置示意图。
图2为本发明Ii声线检测起点P1的位置示意图。
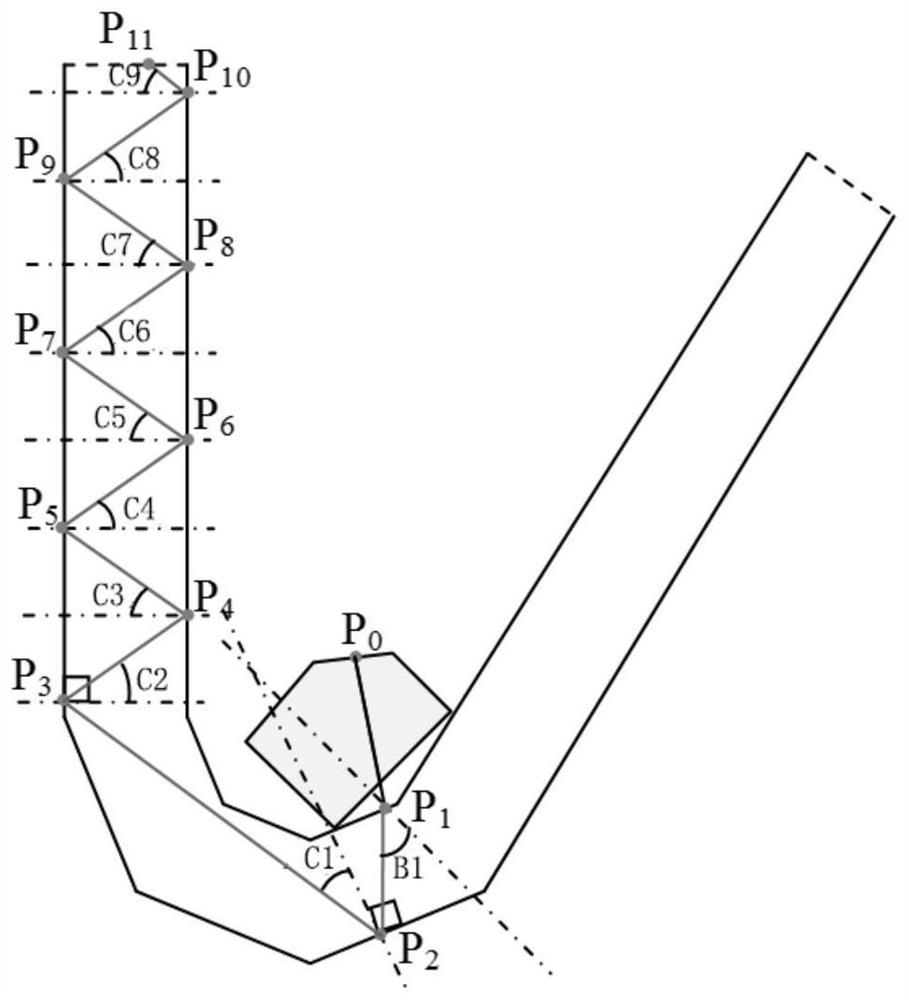
图3为本发明Ii声线模拟图。
图4为本发明应用的仿真结果模拟图1。
图5为本发明应用的仿真结果模拟图2。
附图中各序号表示的意义如下:
1晶片,2探头楔块,3工件。
具体实施方式
下面结合附图对本发明做详细说明。
实施例:
本发明实施例的一种工件3内部超声声线路径模拟算法,包括如下步骤:
工件3模拟,依据工件3的外形,将工件3的外观结构信息输入处理终端,模拟出电子化的工件3形状;该工件3模拟可以通过对实际工件3进行对应计算形成工件3,或者通过机械制图软件,导出工件3的线条图,在处理终端模拟出工件3的具体形状。
工件3标注,对电子化的工件3形状进行标注,将反射线段标注为L
具体的,所述反射线段为实际检测时要求工件3发生反射的对应面经过工件3模拟步骤形成的模拟线段,所述非反射线段为实际检测时不需要工件3发生反射的对应面经过工件3模拟步骤形成的模拟线段。
例如普通的平板,由上下两根平行线段以及垂直并封闭这两条平行线段的垂直线段构成,检测时,主要检测上下两根平行线段所处平面的缺陷,那么这两根上下平行的线段信息就称为板的反射线段,两边两条垂直线段则为非反射线段。又例如圆管剖面,我们可以由两个圆构成反射线段,这里,需要将两个圆根据圆的公式(x-x0)2+(y-y0)2=r2转换根据所需精度将圆n等分后将点连接成线段作为输入。不同的工件3,这些输入条件都得根据工件3特性进行解剖。对于更为复杂的工件3,可以借助其他机械制图软件(如CAD软件)进行转换,这些作图软件一般都能把特殊工件3转换为线段输出。
Ii声线检测起点确定,按照实际检测时,超声探头的放置位置,在处理终端中进行标注,确定晶片1对应的虚拟位置P0,在通过超声探头发出Ii声线的声线角度Ai,通过斯涅尔定律反推出探头晶片1对应Ii声线的入射角度Ai’,通过晶片1位置P0与Ii声线的入射角度Ai’,计算Ii出声线从晶片1发出到探头楔块2的表面交点P0’ 如图1所示,,通过P0与P0’所在直线与反射线段的交点的第一个满足误差参数δ1、δ2的点,确定为Ii声线检测起点P1如图2所示,;具体的,所述误差参数δ1为声线与探头楔块2表面的交点P0’到工件3表面的交点P1的最大容忍误差值;所述误差参数δ2为计算声线与线段交点P1时,当P1与线段不相交但与线段所在直线相交,则线段与直线的相交点与线段的距离的最大容忍误差值。误差参数主要用于处理终端进行处理时与实际工件3检测时可能存在的细微误差而设定的,一般情况下,超声探头楔块2是直接与工件3贴合的,但有时候由于工件3的特殊情况,导致楔块2无法直接和工件3贴合,因此引入误差参数δ1,从而确保仿真效果贴近实际检测的情形,即误差参数δ1的取值以楔块2与工件3贴合时的距离误差确定。而误差参数δ2的设定是由于处理终端的精度误差导致理论上线段应与声线相交,所以计算的点与理论的点存在的误差,一般情况下,按照处理终端对工件的实际显示情况进行控制。处理终端一般采用计算机充当。
Ii声线工件3内部入射角度确定,通过Ii声线角度Ai与Ii声线检测起点P1,计算Ii声线所在直线与反射线段的交点,根据折射定律,按照不同工件3材质不同的折射率,确定Ii声线在工件3内部入射角度Bi;工件3内部入射角度Bi是声线在工件3内部传播的初始角度,需要将该角度精准确定,方能保证声线仿真与实际检测相互匹配。
获取第一反射交点,依据初始折射角度Bi折射出的Ii声线,计算将折射角度Bi作为入射角度,折射出的Ii声线与反射线段的第一反射交点P2,通过反射定律,确定Ii声线的反射角度Ci;
具体的,还包括有如下步骤:
判断相邻作用线段角度Z,作用线段为对Ii声线起反射作用时反射点所在的反射线段,相邻作用线段为最接近两个对Ii声线起反射作用时反射点所在反射线段,将相邻作用线段分别记为Li与Li+j,当Li与Li+j平行时,Ii声线均匀反射,此时相邻作用线段角度Z=180°,当Li与Li+j直接相交时,处理终端读取通过工件3标注步骤中标注的Li与Li+j的角度Xi,此时相邻作用线段角度Z=Xi,当Li与Li+j不直接相交时,处理终端直接通过Li与Li+j延长的交点并读取通过工件3标注步骤中标注的Li、Li+j以及两个线段之间夹持的若干线段对应的角度,计算出Li与Li+j的角度Yi,此时,相邻作用线段角度Z=Yi;相邻作用线段角度Z的判断只要保证能够计算出Ii声线的反射角度,在工件3为均匀形状时,声线的传播是均匀的,而当检测的为异型工件3时,工件3的形状不均匀,将导致声线的传播呈多样化,因此,需要确定相邻作用线段角度Z用以确定Ii声线的每次反射角度。
获得Ii声线的反射角度Ci,当Z=180°时,反射角度Ci与入射角度Bi相等,当Z=Xi或Yi是,线段Li与Li+j的交点与两个对应的反射点组成一个三角形,通过三角形内角和为180°的原理,结合Li与Li+j的角度以及Ii声线的入射角度Bi,获得Ii声线的反射角度Ci=90°-(180°-Xi/Yi-(90°-Bi))。由于异型工件3的形状不一,从而导致相邻作用线段可能为不相邻的线段,因此,需要单独对Ii声线的反射角度Ci进行判断,从而保证仿真效果的准确与可用。
形成Ii声线模拟图,依据获取第一反射交点步骤,将每次获得的反射角度Ci作为新的入射角度,重复计算Ii声线与反射线段的交点Pj,直至反射声线落在非反射线段或达到X次回波数时,停止算法,将若干交点Pj依次连线,获得完整的Ii声线模拟图;单一声线形成单一的声线模拟图如图3所示。
完整模拟图,将晶片1发射出的若干声线依据Ii声线检测起点确定、Ii声线工件3内部入射角度确定、获取第一反射交点、形成Ii声线模拟图的步骤依次进行,获得若干副声线模拟图,将若干副声线模拟图进行叠加获得完整模拟图。将多张声线模拟图进行叠加,从而得到完整模拟图,如图4与图5是两种不同工件3的仿真结果模拟图。
以上内容是结合具体的优选实施方式对本发明所做的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种工件内部超声声线路径模拟算法
- 一种热模拟装置及工件内部温度场热模拟方法