终端位置推定系统、终端位置推定装置、终端位置推定方法以及控制程序
文献发布时间:2023-06-19 09:36:59
相关申请的交叉引用
本申请基于2018年6月14日提交的日本专利申请2018-113737号,并通过参照在此引用其记载内容。
技术领域
本公开涉及使用电波来推定位置的终端位置推定系统、终端位置推定装置、终端位置推定方法以及控制程序。
背景技术
公知有使用电波来推定位置的技术。例如专利文献1公开了基于LF(换句话说,长波)的强度与距离的三次方成反比例地衰减的性质,根据从搭载于车辆的2个LF发送天线发送的LF被电子钥匙的LF接收天线分别接收到的强度来推定电子钥匙的位置的技术。在专利文献1中,按LF发送天线来判定被发送的LF的强度属于存在于3种基准强度之间的由同心圆表示的多个强度范围中的哪个强度范围。而且,根据各个LF发送天线的被发送的LF的强度属于哪个强度范围的组合来推定电子钥匙的位置。
专利文献1:JP 5736693 B2。
在专利文献1中,假设成为磁场强度与距离的三次方成反比例的理想同心圆状的分布,推定电子钥匙的位置。然而,根据LF发送天线的指向性,磁场强度分布不为同心圆状而为椭圆状,所以在专利文献1所公开的技术中,电子钥匙的位置推定的精度有可能降低。
发明内容
本公开的一个目的在于,提供能够进一步提高使用由通信终端从多个发送天线接收的电波推定出的通信终端的位置的精度的终端位置推定系统、终端位置推定装置、终端位置推定方法以及控制程序。
根据本公开的一方式,终端位置推定系统包括:规定的多个发送天线;通信终端的接收天线,接收从发送天线发送的电波;强度判定部,判定由接收天线接收的电波的磁场强度;以及终端位置推定部,使用由强度判定部判定的从多个发送天线发送的电波的磁场强度来推定通信终端的位置。终端位置推定部在使用从多个发送天线发送的电波的磁场强度来推定通信终端的位置时,将在规定的范围内满足按发送天线的近似式的位置推定为通信终端的位置,其中上述按发送天线的近似式用从发送天线到通信终端的位置的距离和通信终端所在的方向相对于发送天线的轴向的角度这二个变量表示按发送天线的磁场强度分布。
终端位置推定装置具备:强度获取部,获取由通信终端的接收天线接收到的从规定的多个发送天线发送的电波的磁场强度;以及终端位置推定部,使用由强度获取部获取的从多个发送天线发送的电波的磁场强度来推定通信终端的位置。终端位置推定部在使用从多个发送天线发送的电波的磁场强度推定通信终端的位置时,将在规定的范围内满足按发送天线的近似式的位置推定为通信终端的位置,其中,上述按发送天线的近似式用从发送天线到通信终端的位置的距离和通信终端所在的方向相对于发送天线的轴向的角度这二个变量表示按发送天线的磁场强度分布。
在终端位置推定方法中,由通信终端的接收天线接收从规定的多个发送天线发送的电波,判定由接收天线接收的电波的磁场强度,在使用对于从多个发送天线发送的电波判定出的磁场强度推定通信终端的位置时,将在规定的范围内满足按发送天线的近似式的位置推定为通信终端的位置,其中,上述按发送天线的近似式用从发送天线到通信终端的位置的距离和通信终端所在的方向相对于发送天线的轴向的角度这二个变量表示按发送天线的磁场强度分布。
控制程序使计算机发挥如下作用:强度获取部,获取由通信终端的接收天线接收的从规定的多个发送天线发送的电波的磁场强度;以及终端位置推定部,在使用从多个发送天线发送的电波的磁场强度推定通信终端的位置时,将在规定的范围内满足按发送天线的近似式的位置推定为通信终端的位置,其中,上述按发送天线的近似式用从发送天线到通信终端的位置的距离和通信终端所在的方向相对于发送天线的轴向的角度这二个变量表示按发送天线的磁场强度分布。
根据本公开,在使用从规定的多个发送天线发送的电波的磁场强度推定通信终端的位置时,将在规定的范围内满足按发送天线的近似式的位置推定为通信终端的位置,其中,上述按发送天线的近似式用从发送天线到通信终端的位置的距离和通信终端所在的方向相对于发送天线的轴向的角度这二个变量表示按发送天线的磁场强度分布。即使是根据发送天线的指向性不为同心圆状而为椭圆状的从发送天线发送的电波的磁场强度分布,也能够由从发送天线到通信终端的位置的距离和通信终端所在的方向相对于发送天线的轴向的角度这二个变量的近似式表示。因此,通过将在规定的范围内满足规定的多个发送天线中的按发送天线的近似式的位置推定为通信终端的位置,从而即使在从发送天线发送的电波的磁场强度分布不成为同心圆状而为椭圆状的情况下,也能够更高精度地推定通信终端的位置。其结果,能够进一步提高使用由通信终端从多个发送天线接收的电波推定出的通信终端的位置的精度。
附图说明
本公开的上述以及其他的目的、特征、优点根据参照附图的下述详细说明更加明确。在附图中,
图1是表示终端位置推定系统以及车辆侧单元的概略构成的一个例子的图。
图2是表示通信终端的概略构成的一个例子的图。
图3是用于对LF发送天线的配置的一个例子进行说明的图。
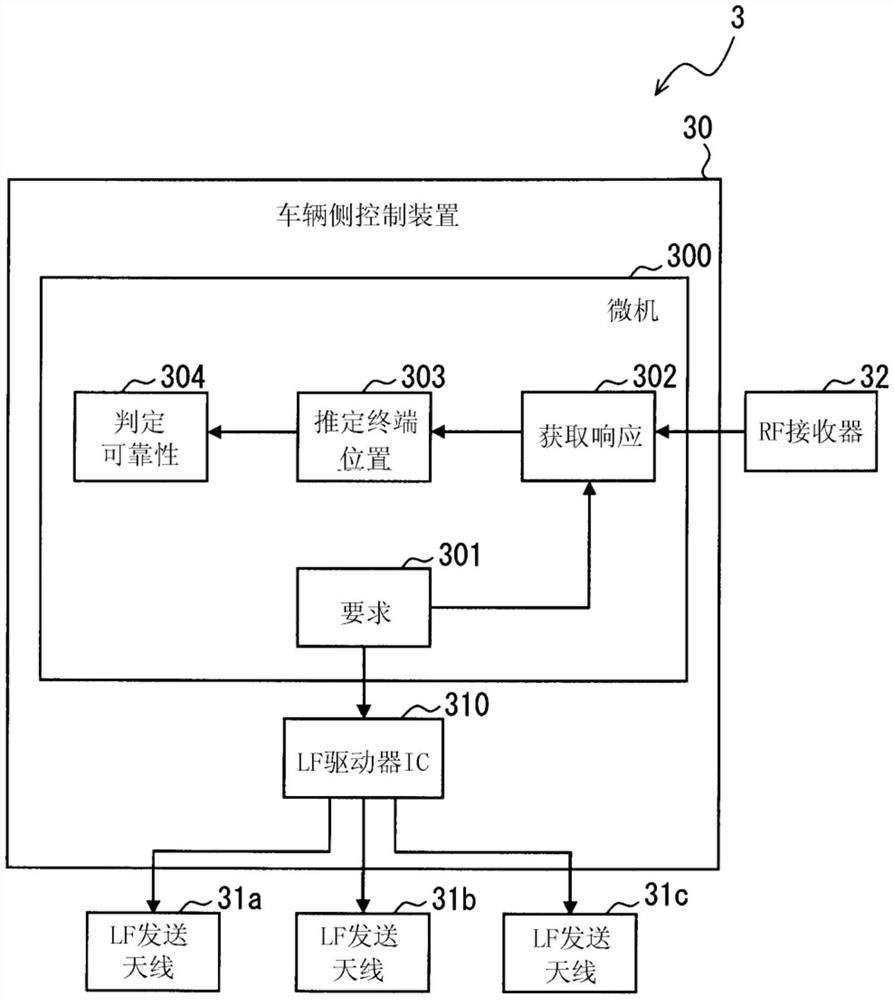
图4是表示车辆侧控制装置的概略构成的一个例子的图。
图5是用于对终端位置推定部中的通信终端的位置推定所使用的近似式的一个例子进行说明的图。
图6是用于对使用近似式的通信终端的位置推定的具体例进行说明的图。
图7是表示实施方式1中的车辆侧控制装置中的位置推定相关处理的流程的一个例子的流程图。
图8是表示实施方式2中的车辆侧控制装置中的位置推定相关处理的流程的一个例子的流程图。
图9是表示实施方式3中的车辆侧控制装置中的位置推定相关处理的流程的一个例子的流程图。
图10是表示实施方式4中的车辆侧控制装置中的位置推定相关处理的流程的一个例子的流程图。
图11是表示车辆侧单元的概略构成的一个例子的图。
图12是表示通信终端的概略构成的一个例子的图。
具体实施方式
(实施方式1)
(终端位置推定系统的构成)
如图1所示,终端位置推定系统1包括通信终端2和车辆中使用的车辆侧单元3。通信终端2和车辆侧单元3能够分别通过无线通信载上电波来收发信号。另外,通信终端2和车辆侧单元3在存在于彼此的通信范围内的情况下,一方接收另一方通过无线通信而发送的信号。
(通信终端的构成)
通信终端2例如由用户携带。其中,“由用户携带”不局限于由用户携带着的状态,也包括忘带这样的未被用户携带的状态。这里,使用图2对通信终端2进行说明。如图2所示,通信终端2具备终端侧控制装置20、LF接收天线21、LF接收部22、RF发送部23以及RF发送天线24。
LF接收天线21接收从车辆侧单元3的后述的LF发送天线31载上LF(Lowfrequency:低频)频带的电波而发送来的信号(LF信号)。该LF接收天线21相当于接收天线。LF频带是指例如30kHz~300kHz的低频频带。以下,将LF频带的电波仅称为LF。LF接收天线21是磁场型天线,例如为使用环形天线、条形天线等的构成即可。
LF接收部22对由LF接收天线21接收的LF信号进行电处理并且生成接收信号,将生成的接收信号输出到终端侧控制装置20。RF发送部23对从终端侧控制装置20输入的原始信号进行电处理并且生成针对由LF接收天线21接收到的LF信号的响应信号,将该响应信号从RF发送天线24发送。RF发送天线24载上RF(radio frequency:射频)频带的电波来发送响应信号。RF频带是指例如300Hz~3THz的高频频带。
终端侧控制装置20是IC或者微型计算机等,并具有强度判定部201。强度判定部201判定由LF接收天线21接收的LF的磁场强度(接收磁场强度)。例如磁场强度是磁通密度。接收磁场强度的判定为通过在通信终端2具备计测磁场强度的例如霍尔元件等传感器来根据由该传感器计测的LF的磁场强度进行的构成即可。除此以外,也可以构成为在LF接收部22具备检测流过LF接收天线21的电流的电流检测部,并根据由该电流检测部检测出的电流来计算LF的磁场强度,从而强度判定部201判定接收磁场强度。作为一个例子,构成为在LF接收天线21是分别相互正交地配置的多轴的线圈天线的情况下,根据例如由电流检测部检测到的各轴的线圈天线的电流量以及电流方向来确定各轴的磁场,并合成各轴的磁场,求出磁场向量来判定接收磁场强度即可。
终端侧控制装置20在生成与从LF接收部22输入的接收信号对应的响应信号的原始信号时,生成包括由强度判定部201判定的接收磁场强度的响应信号的原始信号,并将该原始信号输出到RF发送部23。通过RF发送部23发送包括接收磁场强度的响应信号。此外,在从后述的多个LF发送天线31按顺序地发送来LF信号的情况下,在每个LF信号被发送来的时机返回响应信号,所以返回包括各个LF发送天线31的接收磁场强度的各个LF发送天线31的响应信号。
(车辆侧单元的构成)
使用图1对车辆侧单元3的概略构成进行说明。如图1所示,车辆侧单元3具备车辆侧控制装置30、LF发送天线31a~31c、以及RF接收器32。
LF发送天线31a~31c是利用LF发送信号的发送天线。在不区别LF发送天线31a~31c各个进行说明的情况下,称为LF发送天线31。LF发送天线31是使用天线线圈的磁场型天线,例如为使用1轴的环形天线、条形天线等的构成即可。
使用图3对LF发送天线31a~31c的配置的一个例子进行说明。如图3所示,LF发送天线31a配置于车辆的车身中的车辆右侧。作为一个例子,构成为以轴沿车辆的前后方向的方式内置于车辆的驾驶座的外门把手即可。LF发送天线31b配置于车辆的车身中的车辆左侧。作为一个例子,构成为以轴沿车辆的前后方向的方式内置于车辆的副驾驶座的外门把手即可。LF发送天线31c配置于车辆的车身中的车辆后侧。作为一个例子,构成为以轴沿车辆的左右方向的方式内置于后保险杠即可。
LF发送天线31a~31c也可以构成为使沿天线开口面的法线方向延伸的轴在相同的方向上对齐地排列配置。然而,成为椭圆形状的磁场强度分布的短边方向的磁场等高线难以相交,后述的终端位置的推定精度容易降低,所以优选至少一个LF发送天线31相对于其他的发送天线31改变沿天线开口面的法线方向延伸的轴的方向。例如,优选LF发送天线31a、LF发送天线31b以及LF发送天线31c如图3的虚线的箭头所示那样,沿天线开口面的法线方向延伸的轴相互相交。换言之,优选配置于与其他的LF发送天线31的搭载方向相交的方向。搭载方向也可以称为LF发送天线31的轴向。
在图3中,示出了LF发送天线31a和LF发送天线31c、以及LF发送天线31b和LF发送天线31c的沿天线开口面的法线方向延伸的轴的搭载方向相互垂直相交的例子,但只要是相交即可,并不限于垂直相交的结构。
RF接收器32接收利用RF频带的电波从通信终端2侧发送来的包括接收磁场强度的响应信号。车辆侧控制装置30具备处理器、存储器、I/O、以及连接这些部件的总线,通过执行存储于存储器的控制程序来执行与通信终端2的位置的推定相关的处理等各种处理。处理器执行该控制程序相当于执行与控制程序对应的方法。该方法相当于终端位置推定方法。存储器是非暂时性地储存由计算机能够读取的程序以及数据的非过渡性实体存储介质(non-transitory tangible storage medium)。另外,非过渡性实体存储介质由半导体存储器或者磁盘等实现。
(车辆侧控制装置的构成)
使用图4对车辆侧控制装置30的概略构成的一个例子进行说明。如图4所示,车辆侧控制装置30具备微机300以及LF驱动器IC310。车辆侧控制装置30与LF发送天线31a~31c、RF接收器32等连接。
如图4所示,微机300具备要求部301、响应获取部302、终端位置推定部303、以及可靠性判定部304作为功能模块。该微机300相当于终端位置推定装置。要求部301要求LFLF驱动器IC310使LF信号从发送天线31a~31c按顺序发送。作为一个例子,要求部301构成为将本车驻车且设置于车门的外门把手的门把手SW被操作这一情形作为触发来要求LF信号的发送即可。本车的驻车可以根据由车速传感器检测的车速、由档位传感器检测到的档位、驻车制动器开关的信号等由微机300判定。门把手SW被操作这一情形可以根据门把手SW的信号由微机300判定。作为其他的例子,要求部301也可以构成为将本车驻车且用于要求车辆的行驶驱动源的启动的按钮SW被操作这一情形作为触发来要求LF信号的发送。按钮SW被操作这一情形可以根据按钮SW的信号由微机300判定。
LF驱动器IC310是使LF信号从LF发送天线31a~31c发送的IC。LF驱动器IC310根据来自要求部301的要求,使LF信号从LF发送天线31a~31c按顺序发送。通信终端2对于从LF发送天线31a~31c按顺序发送的LF信号,按LF发送天线31返回包括各个LF发送天线的接收磁场强度的响应信号。另外,在车辆侧控制装置30中,根据是与LF发送天线31a~31c中的哪个LF发送天线31的发送时机对应的响应信号,来区别各个LF发送天线31的响应信号。
响应获取部302获取由RF接收器32从通信终端2接收的包括接收磁场强度的响应信号。该响应获取部302相当于强度获取部。响应获取部302将响应信号所包含的各个LF发送天线31的接收磁场强度输出到终端位置推定部303。
在本实施方式中,虽然详细内容省略,但在响应信号包含有认证用的代码的情况下,使用该代码进行认证,根据由终端位置推定部303推定出的通信终端2的位置和认证是否成立,来进行车门的上锁和解锁、车辆的行驶驱动源的启动许可等即可。
终端位置推定部303使用由响应获取部302获取的各个LF发送天线31的接收磁场强度来推定通信终端2的位置。终端位置推定部303即使在从LF发送天线31发送的LF的磁场强度分布不为同心圆状的情况下也更高精度地推定通信终端2的位置,所以使用磁场强度分布的近似式来推定通信终端2的位置。
使用图5对终端位置推定部303中的通信终端2的位置推定所使用的近似式的一个例子进行说明。这里,对假设LF发送天线31为1匝的环形天线而将磁场强度分布公式化的情况下的例子进行说明。在图5的例子中,将LF发送天线31的半径设为a,将流过LF发送天线31的电流设为I,将从LF发送天线31的环中心O到通信终端2的位置P的距离设为r,将位置P与天线开口面的法线方向的轴的角度设为θ。在图5的例子的情况下,根据毕奥萨瓦特定律,位置P处的磁场强度B能够由以下的式1表示。
[数1]
在线积分的过程中进行a与r相比非常小这样的近似,从而位置P处的磁场强度B能够由以下的式2的近似式表示。式2的近似式可以说是表示LF发送天线31的磁场强度分布的公式。式2的μ
[数2]
对使用式2的近似式的通信终端2的位置推定的具体例子进行说明。这里,如图6所示,将待推定的通信终端2的位置(终端位置)设为(X
[数3]
[数4]
[数5]
若由响应获取部302获取的LF发送天线31a~31c的接收磁场强度输入到终端位置推定部303,则在式3~式5的联立方程中,由于B的值已定,所以变量为X
求解这些联立方程并不容易,在接收磁场强度、LF发送天线31的位置、常量k等包括误差的情况下,解变得不稳定。因此,优选通过以下所述的方法,推定更确切的终端位置。
改写式3~式5后的以下的式6~式8在没有误差的理想状态的情况下,M
[数6]
[数7]
[数8]
终端位置推定部303首先假设多个终端位置的候选,按假设的多个候选位置来计算M
[数9]
残差=M
在使用以上的方法来推定终端位置的情况下,需要按假设的多个候选位置的每一个候选进行运算,所以终端位置推定部303中的运算量变多。例如,若对于5m
更优选通过以下所述的方法,推定更确切的终端位置的同时减少运算量。在该方法中,利用残差的分布以真实的终端位置为中心单调增加的现象,进一步减少终端位置推定部303中的运算量。
终端位置推定部303以比终端位置的要求推定精度粗的间隔假设多个候选位置,计算残差,选定残差最小的候选位置。接着,反复进行在选定的候选位置周边进一步缩小间隔地再次假设多个候选位置,并计算残差,选定残差最小的候选位置的处理直至达到要求推定精度以下的间隔为止。而且,将以要求推定精度以下的间隔假设的候选位置中的残差最小的候选位置推定为终端位置即可。
在推定通信终端2的位置的对象范围预先已定的情况下,将该对象范围设为范围的上限即可。另外,假设候选位置的间隔为等间隔即可,选定的候选位置周边是指该候选位置附近且包括该候选位置的假设该候选位置时的间隔内的范围即可。例如对象范围为5m
可靠性判定部304判定由终端位置推定部303逐次推定的终端位置有无可靠性。可靠性判定部304根据由终端位置推定部303逐次推定的终端位置的从过去推定出的终端位置起的每单位时间的移动距离是否为规定距离以下,来判定推定出的终端位置有无可靠性。详细而言,可靠性判定部304在每单位时间的移动距离为规定距离以下的情况下判定为有可靠性,另一方面,在大于规定距离的情况下判定为无可靠性。
单位时间能够任意设定。距离是能够区分通信终端2每单位时间能够移动的距离和不能移动的距离的距离,能够任意设定。例如,设为人能够徒歩移动的每单位时间的距离即可。能够对于作为通信终端2的移动示出不可能的移动的明显错误的终端位置,判定为无可靠性。此外,由终端位置推定部303逐次推定的终端位置例如在一定期间积蓄于车辆侧控制装置30的存储器,可靠性判定部304为使用积蓄于该存储器的终端位置判定终端位置有无可靠性的构成即可。
例如,在车辆侧控制装置30中,对于由可靠性判定部304判定为无可靠性的终端位置,使其不使用于下游的处理即可。另外,对于由可靠性判定部304判定为无可靠性的终端位置,也可以使判定为有可靠性的最近的过去的终端位置使用于下游的处理等。
(车辆侧控制装置中的位置推定相关处理)
使用图7的流程图对与车辆侧控制装置30中的终端位置的推定相关的处理(位置推定相关处理)进行说明。图7的流程图为每当要求部301进行使LF信号从LF发送天线31a~31c按顺序发送的要求就开始的构成即可。
在S1中,LF驱动器IC310使LF信号载上LF而从LF发送天线31a~31c按顺序发送。在接收承载于LF的LF信号的通信终端2中,强度判定部201判定由LF接收天线21接收的LF的接收磁场强度,返回包括各个LF发送天线31的接收磁场强度的响应信号。在S2中,响应获取部302获取对于来自各LF发送天线31的LF信号的发送由RF接收器32依次接收的响应信号所包含的接收磁场强度。换句话说,获取各个LF发送天线31的接收磁场强度。
在S3中,终端位置推定部303以比终端位置的要求推定精度粗的间隔假设多个候选位置作为初始的候选位置。在S4中,使用式2的近似式和在S2中获取的各个LF发送天线31的接收磁场强度来计算上述的M
在S5中,终端位置推定部303根据在S4中计算出的各个LF发送天线31的误差M
在S7中,终端位置推定部303选定在S5中计算的残差最小的候选位置,在选定的候选位置周边进一步缩小间隔地再次假设多个候选位置,返回S4并反复进行处理。该处理反复进行到假设的候选位置的间隔达到要求推定精度以下的间隔为止。在S8中,终端位置推定部303将在S5中计算出的残差最小的候选位置推定为终端位置。
在S9中,可靠性判定部304根据在S8中推定出的终端位置的从过去推定出的终端位置起的每单位时间的移动距离是否为规定距离以下,判定终端位置有无可靠性,并结束位置推定相关处理。
即使是根据LF发送天线31的指向性成为椭圆状的、从LF发送天线31发送来的LF的磁场强度分布,也能够由从该LF发送天线31到通信终端2的位置的距离r和通信终端2所在的方向相对于该LF发送天线31的轴向的角度θ这二个变量的近似式表示。根据实施方式1的构成,使用从规定的(换句话说,位置已知的)多个LF发送天线31发送的LF的接收磁场强度来推定终端位置时,将在要求推定精度以下的范围内满足由该距离r和角度θ这二个变量表示各个LF发送天线31的磁场强度分布的各个LF发送天线31的近似式的位置推定为终端位置。因此,即使是从LF发送天线31发送的LF的磁场强度分布不为同心圆状而为椭圆状的情况,也能够更高精度地推定终端位置。其结果为,能够进一步提高使用由通信终端2从多个发送天线31接收的电波推定的通信终端2的位置的精度。另外,也可以将要求推定精度以下的范围作为规定范围。
由于通过最小二乘法计算残差,所以能够减少终端位置推定部303中的运算负荷,并且更高精度地决定假设的多个候选位置中最有可能的候选位置。其结果为,能够减少终端位置推定部303中的运算负荷,并且提高终端位置的推定精度。
示出LF发送天线31为3个的情况的例子,但并不一定局限于此。例如,可以是LF发送天线31为2个的情况,也可以是4个以上的情况。另外,在实施方式1中,示出将XYZ空间上的位置(X
示出使用磁通密度作为磁场强度的情况的例子,但磁场的强度H和磁通密度B表示出H=(1/μ
(实施方式2)
在实施方式1中,示出了通过最小二乘法计算残差的构成,但不一定局限于此。在实施方式2中,例如,也可以为对计算残差的公式进行与接收磁场强度对应的加权并计算残差的构成,换句话说通过加权最小二乘法计算残差的构成。作为加权的例子,举出由以下的式10所表示的例子。AB
[数10]
残差=AB
LF发送天线31的磁场强度分布与距LF发送天线31的距离的三次方成反比例,所以各个LF发送天线31的、将假设的多个候选位置使用于式2的近似式而得到的磁场强度与由响应获取部302获取到的接收磁场强度的误差在接收磁场强度较强时变小。因此,通过随着接收磁场强度变强而增大加权的系数进行加权来计算残差,从而能够更高精度地决定在假设的多个候选位置中最确切的候选位置。其结果为,能够减少终端位置推定部303中的运算负荷,并且进一步提高终端位置的推定精度。
使用图8的流程图对实施方式2中的车辆侧控制装置30中的位置推定相关处理进行说明。图8的流程图除了代替S5的处理而进行S5a的处理的点以外,与实施方式1的位置推定相关处理相同。在S5a中,终端位置推定部303根据在S4中计算出的各个LF发送天线31的误差M
(实施方式3)
在实施方式1中,示出了以比终端位置的要求推定精度粗的间隔假设多个候选位置作为初始的候选位置的构成。在实施方式3中,也可以为缩小到使用牛顿法大致确定出的终端位置的周边来假设多个候选位置作为初始的候选位置的构成。
终端位置推定部303在将各个LF发送天线31的磁场强度分布近似为圆形后,根据由响应获取部302获取的各个LF发送天线31的接收磁场强度分别求出各LF发送天线31与通信终端2的距离。这里,LF发送天线31的磁场强度分布参照与距LF发送天线31的距离的三次方成反比例的关系,求出各LF发送天线31与通信终端2的距离即可。而且,通过牛顿法确定出最满足求出的这些距离的终端位置,缩小到确定出的终端位置周边假设多个候选位置即可。
确定出的位置周边是确定出的终端位置附近即可,在实施方式1中为比假设多个初始的候选位置的范围窄的范围即可。另外,优选假设多个候选位置的间隔为比终端位置的要求推定精度粗的间隔。
能够将终端位置推定部303中的运算负荷减少与缩小到使用牛顿法大致确定出的终端位置的周边假设多个候选位置相应的量。另外,优选缩小到使用牛顿法大致确定出的终端位置的周边假设多个候选位置后,选定上述的残差最小的候选位置,并通过反复进行在选定的该候选位置周边进一步缩小间隔地再次假设多个候选位置并选定残差最小的候选位置的处理,来更高精度地推定通信终端的位置。
使用图9的流程图对车辆侧控制装置30中的位置推定相关处理进行说明。图9的流程图除了代替S3的处理而进行S3a的处理的点以外,与实施方式1的位置推定相关处理相同。在S3a中,终端位置推定部303在将磁场强度分布近似为圆形后,缩小到使用牛顿法大致确定出的终端位置的周边假设多个候选位置。
(实施方式4)
在实施方式1中,示出了以比终端位置的要求推定精度粗的间隔假设多个候选位置作为初始的候选位置的构成。在实施方式4中,也可以为缩小到过去推定出的终端位置的周边假设多个候选位置作为初始的候选位置的构成。
作为一个例子,终端位置推定部303缩小到最近的过去推定出的终端位置周边假设多个候选位置即可。最近的过去推定出的终端位置周边是指最近的过去推定出的终端位置附近即可,为比在实施方式1中假设多个初始的候选位置的范围窄的范围即可。另外,优选假设多个候选位置的间隔为比终端位置的要求推定精度粗的间隔。此外,在不存在过去推定出的终端位置的情况下,为与实施方式1、3相同地推定终端位置的构成即可。
能够将终端位置推定部303中的运算负荷减少与缩小到过去推定出的终端位置的周边假设多个候选位置相应的量。另外,优选在缩小到过去推定出的终端位置的周边假设多个候选位置之后,选定上述的残差最小的候选位置,并通过反复进行在选定的该候选位置周边进一步缩小间隔地再次假设多个候选位置,选定残差最小的候选位置的处理,来高精度地推定通信终端的位置。
使用图10的流程图对车辆侧控制装置30中的位置推定相关处理进行说明。图10的流程图除了代替S3的处理而进行S3b的处理的点以外,与实施方式1的位置推定相关处理相同。在S3b中,终端位置推定部303缩小到过去推定出的终端位置的周边假设多个候选位置。
(实施方式5)
在实施方式1中,示出了在车辆侧进行终端位置的推定的构成,但并不一定局限于此。在实施方式5中,例如,也可以为在通信终端侧进行终端位置的推定的构成。以下,对实施方式5的构成进行说明。实施方式5的终端位置推定系统1包括用户所携带的通信终端2a和车辆中使用的车辆侧单元3a。
使用图11进行车辆侧单元3a的说明。如图11所示,车辆侧单元3a具备车辆侧控制装置30a、LF发送天线31a~31c、以及RF接收器32。车辆侧单元3a除了代替车辆侧控制装置30而包括车辆侧控制装置30a这一点以外,与实施方式1的车辆侧单元3相同。
如图11所示,车辆侧控制装置30a具备微机300a以及LF驱动器IC310a。车辆侧控制装置30a除了代替微机300以及LF驱动器IC310而具备微机300a以及LF驱动器IC310a这一点以外,与实施方式1的车辆侧控制装置30相同。
如图11所示,微机300a具备要求部301以及响应获取部302a作为功能模块。微机300a除了不具备终端位置推定部303以及可靠性判定部304这一点和代替响应获取部302而具备响应获取部302a这一点以外,与实施方式1的微机300相同。
响应获取部302a获取由RF接收器32从通信终端2a接收的包括由通信终端2a推定出的终端位置的响应信号。该响应获取部302相当于强度获取部。
在车辆侧控制装置30a中,在例如响应信号包含有认证用的代码的情况下,使用该代码进行认证,根据由响应获取部302a获取的通信终端2的位置和认证是否成立,进行车门的上锁和解锁、车辆的行驶驱动源的启动许可等即可。
LF驱动器UC310a除了一部分的处理不同这一点以外,与实施方式1的LF驱动器IC310相同。LF驱动器IC310a在使LF信号从LF发送天线31a~31c按顺序发送时,使该LF信号包括各LF发送天线31的位置来发送。
使用图12进行通信终端2a的说明。如图12所示,通信终端2a具备终端侧控制装置20a、LF接收天线21、LF接收部22、RF发送部23a、以及RF发送天线24。通信终端2a除了代替终端侧控制装置20以及RF发送部23而具备终端侧控制装置20a以及RF发送部23a这一点以外,与实施方式1的通信终端2相同。
终端侧控制装置20a是微型计算机等,并具有强度判定部201a、终端位置推定部202、以及可靠性判定部203。该终端侧控制装置20a也相当于终端位置推定装置。终端侧控制装置20a除了代替强度判定部201而具有强度判定部201a这一点和具有终端位置推定部202以及可靠性判定部203这一点以外,与实施方式1的终端侧控制装置20相同。终端侧控制装置20a具备处理器、存储器、I/O、以及连接这些部件的总线,通过执行存储于存储器的控制程序来执行与通信终端2的位置的推定相关的处理等各种处理。处理器执行该控制程序相当于执行与控制程序对应的方法。该方法相当于终端位置推定方法。存储器是非暂时地储存能够由计算机读取的程序以及数据的非过渡性实体存储介质(non-transitorytangible storage medium)。另外,非过渡性实体存储介质由半导体存储器或者磁盘等实现。
强度判定部201a通过与实施方式1的强度判定部201相同地判定接收磁场强度,来获取从各LF发送天线31发送的电波的接收磁场强度。终端位置推定部202使用由强度判定部201a获取的各个LF发送天线31的接收磁场强度和由LF接收部22接收的各个LF发送天线31的LF信号所包含的LF发送天线31的位置来推定通信终端2的位置。终端位置推定部202为与实施方式1的终端位置推定部303相同地进行终端位置推定处理的构成即可。
终端侧控制装置20a在生成与从LF接收部22输入的接收信号对应的响应信号的原始信号时,生成包括由终端位置推定部202推定的终端位置的响应信号的原始信号,并将该原始信号输出到RF发送部23。由RF发送部23发送包括终端位置的响应信号。
可靠性判定部203判定由终端位置推定部202逐次推定的终端位置有无可靠性。可靠性判定部203与实施方式1的可靠性判定部304相同地推定终端位置有无可靠性即可。构成为由可靠性判定部203判定的终端位置有无可靠性包含于响应信号并发送即可。
实施方式5的构成代替在车辆侧进行终端位置的推定的构成,而采用在通信终端侧进行的构成。即使是采用这样的结构的情况,也能够同样地得到能够进一步提高使用由通信终端2a从多个LF发送天线31接收的电波推定的通信终端2a的位置的精度这样的效果。
也可以不局限于将由通信终端2a推定的终端位置发送到车辆侧单元3a的构成,而由通信终端2a进行与由通信终端2a推定的终端位置对应的处理的构成。例如,也可以由通信终端2a进行表示终端位置的通知等。该情况下,由可靠性判定部203判定为无可靠性的终端位置不使用于下游的处理,或将判定为有可靠性的最近的过去的终端位置使用于下游的处理即可。
(实施方式6)
在上述的实施方式中,示出了由可靠性判定部203、304判定终端位置有无可靠性的构成,但并不一定局限于此。例如,也可以为终端位置推定系统1不具备可靠性判定部203、304,而不判定终端位置有无可靠性的结构。
(实施方式7)
在上述的实施方式中,例举LF作为终端位置的推定所使用的电波进行了说明,但并不一定局限于此。例如,也可以为使用LF以外的电波的结构。
(实施方式8)
在上述的实施方式中,对将终端位置推定系统1应用于针对车辆的终端位置的推定的情况的例子进行了说明,但并不一定局限于此。例如,既可以将终端位置推定系统1应用于室内的终端位置的推定,也可以应用于室外的终端位置的推定。在将终端位置推定系统1应用于室内的终端位置的推定的情况下,将发送终端位置的推定所使用的电波的多个发送天线配置在例如室内,使用相对于该室内的基准点的位置作为发送天线的位置即可。另外,在将终端位置推定系统1应用于室外的终端位置的推定的情况下,将发送终端位置的推定所使用的电波的多个发送天线例如配置于室外,使用相对于该室外的基准点的位置作为发送天线的位置即可。
这里,本公开所记载的流程图、或者流程图的处理由多个步骤(或者,称为部分)构成,各步骤例如表述为S1。并且,各步骤能够分割为多个子步骤,另一方面,也能够多个步骤合起来成为一个步骤。
本公开所记载的控制以及其方法也可以通过构成编程为执行由计算机程序具体化的一个或多个功能的处理器的专用计算机实现。或者,本公开所记载的控制以及其方法也可以通过由专用硬件逻辑电路构成处理器的专用计算机实现。或者,本公开所记载的控制以及其方法也可以通过由执行计算机程序的处理器和一个以上的硬件逻辑电路的组合构成的一个以上的专用计算机实现。另外,计算机程序也可以作为由计算机执行的指令存储于计算机可读非过渡性有形记录介质。
以上,例示了本公开的一个方式所涉及的终端位置推定系统、终端位置推定装置、终端位置推定方法、以及控制程序的实施方式、构成、方式,但本公开的实施方式、构成、方式并不局限于上述的各实施方式、各构成、各方式。例如,适当地组合不同的实施方式、构成、方式分别公开的技术部而得到的实施方式、构成、方式也包含于本公开的实施方式、构成、方式的范围。
- 终端位置推定系统、终端位置推定装置、终端位置推定方法以及控制程序
- 通信系统、无线通信终端、位置推定装置、通信中继装置和连接站