基于归一化磁矩的水下目标相关性检测定位方法
文献发布时间:2023-06-19 09:51:02
技术领域
本发明属于磁探技术领域和磁偶极子定位领域,具体涉及一种基于归一化磁矩的水下目标相关性检测定位方法。
背景技术
由于磁场具有高穿透性、高抗扰性、信号被动接收、低功耗等优势,磁异常探测(MAD:magnetic anomaly detection)已经被广泛应用于遥感探测领域。在磁异常探测领域,一个远距离磁性目标通常可以视为磁偶极子。针对磁偶极子的探测定位问题,通过多传感器布局并采用非线性优化方法进行位置参数的拟合求解,存在系统复杂和计算量大的问题。
在静态磁探测领域,各种基于磁梯度测量的解析算法被广泛研究应用,主要以STAR方法(Wiegert,R.,and J.Oeschger,”Generalized magnetic gradient contractionbased method for detection,localization and discrimination of underwatermines and unexploded ordnance,”Oceans IEEE,vol.2,pp.1325-1332,Sept.2005.)和改进STAR方法等,其优点在于以解析方式求解目标位置等参数,计算量小,磁梯度测量能在一定程度上降低载体和背景磁场的干扰。但这些解析方法由于系统过于复杂,很难应用于动态磁探测领域。
基于正交基的能量检测方法能够提高磁异常探测过程中的信噪比,但传统的正交基方法都是基于背景磁场恒定的假设,与事实不符。
发明内容
针对传统正交基方法存在的无法适应实际动态磁探测需求的缺陷,本发明提供一种基于归一化磁矩的水下目标相关性检测定位方法,该方法从原理上消除了对背景磁场恒定假设的依赖,具备一次探测定位能力。
实现本发明目的的技术方案为:一种基于归一化磁矩的水下目标相关性检测定位方法,运用三轴矢量磁强计构建最简张量测量磁探仪进行磁目标动态定位,具体实现步骤如下:
步骤1、选取磁探仪构型,获取各磁强计三轴测量分量;
步骤2、利用磁强计三轴测量分量,求取磁张量矩阵;
步骤3、求解磁张量矩阵的三个特征值,得到动态磁探测测线上每一点的归一化磁矩;
步骤4、在航磁探测坐标系下,归一化磁矩表示成:
步骤5、将归一化磁矩在设定的时间窗口内进行相关性检测得到检测函数,由检测函数的最大值时刻可获取航磁探测过目标顶点时刻;
步骤6、特征时间搜索获取过目标顶点距离。
与现有技术相比,本发明的有益效果在于:本发明通过将旋转不变量归一化磁矩应用在动态磁探测领域,解决了测量平台姿态不稳以及载体和环境磁干扰问题,基于正交基思想,通过相关性检测有效提高了被探信号的信噪比,并提出特征时间搜索方法获取过顶点距离,提高磁目标动态定位能力,具有实际意义。
附图说明
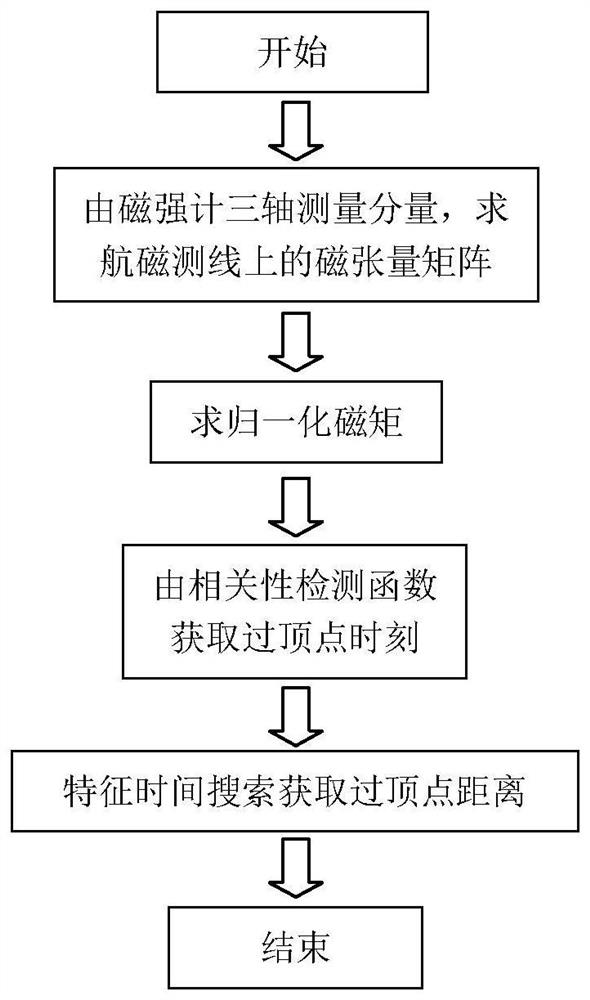
图1为基于归一化磁矩的水下目标相关性检测定位方法流程图。
图2为张量矩阵计算坐标系示意图。
图3为航磁探测坐标系示意图。
图4为最简张量测量磁探仪架构示意图。
图5为特征函数曲线图。
图6为含高斯白噪声的归一化磁矩测量及相关性检测曲线图。
图7为相关函数随特征时间比值变化关系示意图。
具体实施方式
如图1所示,本发明的一种基于归一化磁矩的水下目标相关性检测定位方法,运用三轴矢量磁强计构建最简张量测量磁探仪进行磁目标动态定位,包括以下步骤:
步骤1.选取磁探仪构型,获取各磁强计三轴测量分量,分别用B
步骤2.利用磁强计三轴测量分量B
其中,
步骤3.求解磁张量矩阵的三个特征值分别为λ
步骤4.在航磁探测坐标系下,归一化磁矩可以表示成:
其中,μ为相对磁导率,ρ为最小接近距离
步骤5.将归一化磁矩在[-2,2]的时间窗口内进行相关性检测得到检测函数为:
其中,m为检测时间序列,由检测函数的最大值时刻可获取航磁探测过目标顶点时刻。
步骤6.特征时间搜索获取过目标顶点距离。特征时间τ=ρ/V,通过搜索获取真实的特征时间可以得到真实的过顶点距离。取搜索特征时间为τ
在大部分磁探问题中,磁目标距磁探仪距离大于磁目标本体尺寸3倍以上,即磁目标可近似等效为磁偶极子。
下面结合附图对本发明做进一步的说明,为了更好理解本发明的技术方案,现将其原理及计算公式结合具体实施例推导详细叙述如下:
定义归一化磁矩为
如图2所示的张量矩阵计算坐标系
其中,φ为磁矩矢量和相对位置矢量的夹角,则张量矩阵在此坐标系下表示为:
特征方程为
求解特征方程得三个特征值分别为:
从上式可以得出归一化磁矩可以由磁张量矩阵的特征值表示成:
其中,λ
航磁探测坐标系如图3所示。设磁偶极子目标位于坐标原点,航磁测量航迹与X轴方向平行。定义N(0,y
式中t
如图4所示,利用最简三磁强计的架构,利用平面内磁梯度对磁导数的近似等效,仅采用平面内等边三角形架构即能近似获取关于目标的磁张量矩阵。根据静磁场的散度和旋度都为0,近似得到磁张量矩阵:
假设归一化磁矩的测量值为M′
假设初始探测时刻测点离磁异常目标较远,且由于噪声与特征函数没有相关性,则上式可近似等效成
特征函数曲线如图5所示,可知其能量主要集中于[-2,2]的时间窗口内,为便于检测,将相关性检测集中在窗口内计算可得
假设目标磁矩大小M=2×10
定义特征时间为τ=ρ/V,则无量纲参数
由式(11)可知做相关性检测时,m=0即时间窗口过顶点时相关函数得到最大值,因此在特征时间搜索过程中,比较过顶点时刻不同特征时间对应的相关函数大小。定义新的特征函数
令
本发明对测量平台姿态稳定性不敏感,通过相关性检测有效提高了被探信号的信噪比,通过特征时间搜索方法获取过顶点距离可以实现对磁目标动态探测过程中的单点实时定位。
- 基于归一化磁矩的水下目标相关性检测定位方法
- 一种基于宽带信号时延检测的超短基线水下目标定位方法