有限转动张量演示教具
文献发布时间:2023-06-19 10:03:37
技术领域
本发明属于科学教育技术领域,具体涉及一种用于理论力学教学中有限转动张量这一概念的演示教具。
背景技术
有限转动张量是理论力学中描述刚体三维运动的重要概念之一,对其掌握程度直接影响着学生对刚体运动内涵的理解以及后续理论的学习。理解这一概念的困难主要在于:一是以往主要采用理论推导的形式进行讲授,而推导过程涉及大量的矩阵公式计算,比较晦涩难懂;二是没有采用实物直观的形式对其相关应用进行说明。
近年来,随着科学技术的发展,教学模式也在与时俱进,实验教学备受重视。在教学领域,急需具有先进性的教学用具。为了让学生充分理解所学内容,在相关教学中科学的教具必不可少。大学高等教育中,针对工科学生的《理论力学》、《机械系统动力学》、《多体系统动力学》等课程的教学备受重视,这些课程中都涉及到有限转动张量这一概念的讲授。然而,目前对其进行演示或实验的教具在国内还处于比较缺乏的状态。
发明内容
为填补这一空白,本发明为有限转动张量这一概念的教学提供了一种便于课堂演示或实验的教具。
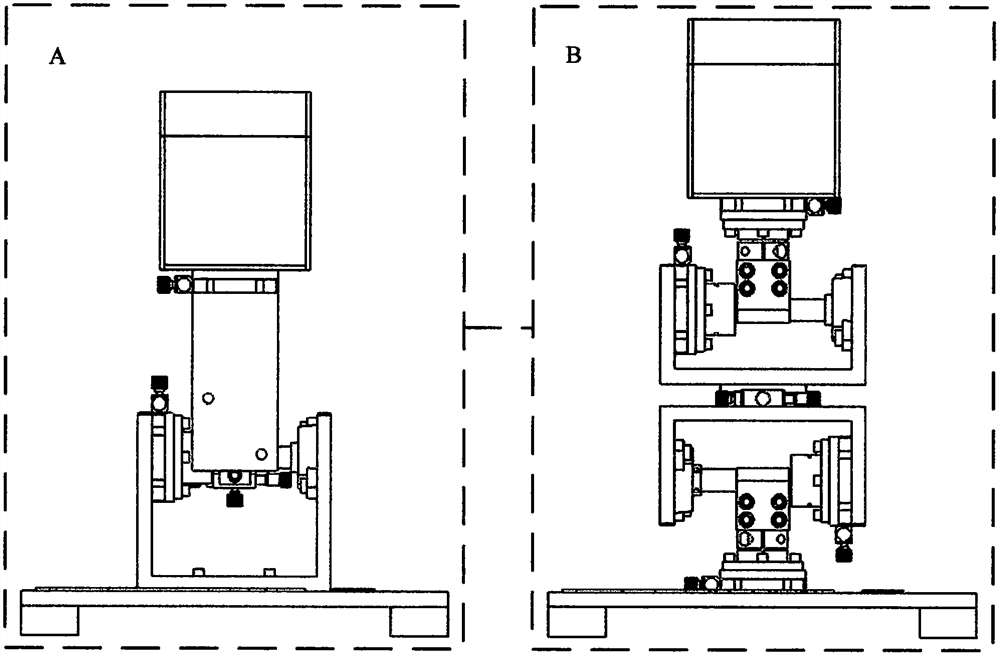
本发明所述一种用于有限转动张量这一概念的演示教具,参阅附图1,包括两个装置:一是,三转角确定刚体姿态装置A(简称三转角装置A);二是,一轴一角确定刚体姿态装置B(简称轴角装置B)。各装置结构如下所述:
(1)三转角装置A:参阅附图2和附图3,由六面体空心刚体I1、带刻度转台I2、Y轴转动支撑架I3、带刻度转台II4、X轴转动支撑架I5、光轴锁紧座I6、底座I7、菱形带座轴承I8、光轴I9、十字光轴连接块I10、光轴锁紧座II11、带刻度转台III12、光轴II13、菱形带座轴承II14组成。其中,六面体空心刚体I1下表面与带刻度转台I2上表面的工作平台通过螺栓固连,带刻度转台I2下表面与Y轴转动支撑架I3上表面通过螺栓固连,Y轴转动支撑架I3的后表面与带刻度转台III12的安装平面通过螺栓固连,带刻度转台III12的工作平台表面与光轴锁紧座II11的安装面通过螺栓固连,光轴II13插入光轴锁紧座II11的安装孔内并通过锁紧螺栓锁紧固连,光轴II13穿过十字光轴连接块I10的上安装孔,并通过十字光轴连接块I10的锁紧螺栓使二者固连,光轴II13插入菱形带座轴承II14,并通过菱形带座轴承II14的锁紧螺钉使轴承内圈与光轴II13固连,菱形带座轴承II14的安装面与Y轴转动支撑架I3的前侧面通过螺栓固连,光轴I9穿过十字光轴连接块I10的下安装孔,并通过十字光轴连接块I10的锁紧螺栓使二者固连,光轴I9的右端插入菱形带座轴承I8,并通过菱形带座轴承I8的锁紧螺钉使轴承内圈与光轴I9固连,菱形带座轴承I8的安装面与X轴转动支撑架I5的右侧面通过螺栓固连,光轴I9的左端插入光轴锁紧座I6的安装孔内并通过锁紧螺栓锁紧固连,光轴锁紧座I6的安装面与带刻度转台II4的工作平台表面通过螺栓固连,带刻度转台II4的安装面与X轴转动支撑架I5的左侧面通过螺栓固连,X轴转动支撑架I5的底面与底座I7通过螺栓固连。在三转角装置A中,六面体空心刚体I1相对底座I7只有三个转动自由度,即分别绕带刻度转台I2、带刻度转台II4、带刻度转台III12的转轴进行转动。
(2)轴角装置B:参阅附图4、附图5和附图6,由六面体空心刚体II15、带刻度转台IV16、光轴锁紧座III17、带刻度转台V18、X轴转动支撑架II19、光轴锁紧座IV20、T型光轴连接块I21、光轴III22、光轴IV23、菱形带座轴承III24、带刻度转台VI25、X轴转动支撑架III26、菱形带座轴承IV27、光轴VI28、T型光轴连接块II29、光轴锁紧座V30、带刻度转台VII31、光轴锁紧座VI32、光轴V33、带刻度转台VIII34、底座II35组成。其中,六面体空心刚体II15的下表面与带刻度转台IV16的安装面通过螺栓固连,带刻度转台IV16的工作平台表面与光轴锁紧座III17的安装面通过螺栓固连,光轴IV23的上端插入光轴锁紧座III17的安装孔内并通过锁紧螺栓锁紧固连,光轴IV23的下端插入T型光轴连接块I21的垂向安装孔内并通过锁紧螺栓锁紧固连,光轴III22穿过T型光轴连接块I21的水平安装孔并通过锁紧螺栓锁紧固连,光轴III22的左端插入光轴锁紧座IV20的安装孔内并通过锁紧螺栓锁紧固连,光轴III22的右端插入菱形带座轴承III24,并通过菱形带座轴承III24的锁紧螺钉使轴承内圈与光轴III22固连,菱形带座轴承III24的安装面与X轴转动支撑架II19的右侧面通过螺栓固连,光轴锁紧座IV20的安装面与带刻度转台V18的工作平台表面通过螺栓固连,带刻度转台V18的安装面与X轴转动支撑架II19的左侧面通过螺栓固连,X轴转动支撑架II19的底面与带刻度转台VI25的工作平台表面通过螺栓固连,带刻度转台VI25的安装面与X轴转动支撑架III26的上表面通过螺栓固连,X轴转动支撑架III26的左侧面与菱形带座轴承IV27通过螺栓固连,光轴VI28的左端插入菱形带座轴承IV27的安装孔,并通过菱形带座轴承IV27的锁紧螺钉使轴承内圈与光轴VI28固连,光轴VI28穿过T型光轴连接块II29的水平安装孔并通过锁紧螺栓锁紧固连,光轴VI28的右端插入光轴锁紧座V30的安装孔内并通过锁紧螺栓锁紧固连,光轴锁紧座V30的安装面与带刻度转台VH31的工作平台表面通过螺栓固连,带刻度转台VII31的安装面与X轴转动支撑架III26的右侧面通过螺栓固连,光轴V33的上端插入T型光轴连接块II29的垂向安装孔内并通过锁紧螺栓锁紧固连,光轴V33的下端插入光轴锁紧座VI32的安装孔内并通过锁紧螺栓锁紧固连,光轴锁紧座VI32的安装面与带刻度转台VIII34的工作平台表面通过螺栓固连,带刻度转台VIII34的安装面与底座II35通过螺栓固连。在轴角装置B中,六面体空心刚体II15相对底座II35只有五个转动自由度,即分别绕带刻度转台IV16、带刻度转台V18、带刻度转台VI25、带刻度转台VII31、带刻度转台VIII34的转轴进行转动。其中,带刻度转台VII31和带刻度转台VIII34的转动用来演示有限转动张量的转轴方向,带刻度转台VI25的转动用来演示绕有限转动张量的转轴的转角,在演示之前,需利用带刻度转台IV16和带刻度转台V18的转动使六面体空心刚体II15回到初始姿态。
本发明的工作原理:
相比于传统的利用公式推导的方式得到有限转动张量的坐标矩阵,本发明采用两个装置以实物直观的形式进行演示和验证。本发明的两个装置的设计依据是:有限转动张量的坐标矩阵是转动前后两个姿态的连体基的方向余弦阵。即,如果用其他方式获得了刚体任意转动前后的方向余弦阵(例如用三次转动的方式),与用转轴和转角计算得到的有限转动张量的坐标矩阵,数值一致,则既能证明有限转动张量的计算公式的正确性,又能说明有限转动张量可以表示任意姿态,同时实物直观地展示了有限转动张量计算中所需的转轴和转角。
(1)通过三转角装置A,可手动设定刚体的任意姿态,通过三个带刻度转台上的刻度盘的读数可获得三个转角度数的具体数值,从而根据欧拉角计算公式可计算得到刚体转动前后的方向余弦阵,并根据欧拉定理计算出欧拉一次转轴和转角;
(2)通过轴角装置B,以实物的形式展示在有限转动张量推导过程中的转轴和转角,通过带刻度转台VII31和带刻度转台VIII34的转动来实现有限转动张量的转轴方向,带刻度转台VI25的转动用来演示绕有限转动张量的转轴的转角,根据这些数值并利用有限转动张量的计算公式即可获得有限转动张量的矩阵;
(3)通过对比三转角装置A获得的方向余弦阵和轴角装置B获得的限转动张量的矩阵,可发现二者相等,从而证明了有限转动张量计算公式的正确性;另外,可通过肉眼观察两个装置中刚体的姿态,可发现二者姿态一致,也可以直观上证明有限转动张量计算公式的正确性,同时证明有限转动张量可以表示任意姿态。
本发明的有益效果:
通过实物直观的形式展示了有限转动张量概念的内涵和意义,并验证了有限转动张量计算公式的正确性,是高等教育中讲授有限转动张量这一概念的有效的演示教具。
在教具的演示过程中,使学生进一步加深对欧拉角以及欧拉定理的概念的理解,加深对刚体姿态问题的感性认识。
轴角装置B中刚体回复初始姿态的方式设计新颖,通过两次串联的转动实现,可以做到准确、直观。
附图说明
图1是有限转动张量演示教具两个装置的结构示意图
图2是三转角装置A的结构示意图
图3是图2中沿D方向的局部视图
图4是轴角装置B的结构示意图
图5是图4的B-B剖视图
图6是图4的C-C剖视图
图7是带刻度转台的结构示意图
图8是菱形带座轴承的结构示意图
图9是光轴锁紧座的结构示意图
图10是十字光轴连接块的结构示意图
图11是T型光轴连接块的结构示意图
图12是三转角装置A中刚体的任意姿态示意图
图13是轴角装置B中确定欧拉一次转轴示意图
图14是轴角装置B中刚体回初始姿态示意图
图15是轴角装置B中刚体绕一轴转一角后姿态示意图
其中:A.三转角装置 B.轴角装置 1.六面体空心刚体I 2.带刻度转台I 3.Y轴转动支撑架I 4.带刻度转台II 5.X轴转动支撑架I 6.光轴锁紧座I 7.底座I 8.菱形带座轴承I 9.光轴I 10.十字光轴连接块I 11.光轴锁紧座II 12.带刻度转台III 13.光轴II 14.菱形带座轴承II 15.六面体空心刚体II 16.带刻度转台IV 17.光轴锁紧座III 18.带刻度转台V 19.X轴转动支撑架II 20.光轴锁紧座IV 21.T型光轴连接块I 22.光轴III 23.光轴IV 24.菱形带座轴承III 25.带刻度转台VI 26.X轴转动支撑架III 27.菱形带座轴承IV28.光轴VI 29.T型光轴连接块II 30.光轴锁紧座V 31.带刻度转台VII 32.光轴锁紧座VI33.光轴V 34.带刻度转台VIII 35.底座II
具体实施方式
请参阅附图1-15,本发明所述一种用于有限转动张量这一概念的演示教具,包括两个装置:三转角装置A、轴角装置B。具体的演示方法如下所述:
(1)初始设置
两个装置刚体姿态一致,且处于水平状态,各带刻度转台均处于零位位置,参阅附图1。
(2)三转角装置A的操作
参阅附图2,通过三转角装置A中三个带刻度转台的精粗切换按钮使它们位于粗调状态,这时,手动搬动六面体空心刚体I1,可在一定范围内任意设置其姿态,确定姿态后,将三个带刻度转台的精粗切换按钮旋至精调装调,并使锁定按钮位于锁定状态,此时,三个带刻度转台不再能继续转动,设其上的刻度尺的转角数值分别为
根据欧拉定理,由
(3)轴角装置B操作
参阅附图4,设带刻度转台VIII34的转角为α,带刻度转台VII31的转角为β,则根据欧拉一次转轴
参阅附图13,带刻度转台VI25的转动轴线方向为欧拉一次转轴
根据实验目的,由于三转角装置A的方向余弦阵描述的是刚体初始姿态到当前姿态的变换,所以,在轴角装置B中,进行欧拉一次转动之前,需要将刚体调整到初始姿态。这一需求是通过带刻度转台IV16和带刻度转台V18的转动即可实现的。由于他们的转动方向与带刻度转台VIII34和带刻度转台VII31的相反,可知带刻度转台V18和带刻度转台IV16分别转动α和β可使刚体回到初始姿态,参阅附图14。
以上工作完成后,即可实现刚体从初始姿态绕一个轴转一个角度的转动,通过带刻度转台VI25转动θ角来实施,转动后刚体姿态,参阅附图15。
根据有限转动张量
将式(1)与式(4)对比可知,
- 有限转动张量演示教具
- 有限转动张量演示教具