不全等六螺旋桨直升机
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及一种不依赖机场,垂直升降、悬停、前后左右飞行的不全等六螺旋桨直升机。
背景技术
目前公知的能实现垂直升降、前后左右飞行、悬停的直升机的成功方法有六螺旋桨直升机,六螺旋桨直升机具有结构简单、可靠性高的优点,但六螺旋桨直升机采用六个完全相同的、桨距较小的定距螺旋桨,载重量小,抗风能力较差。
发明内容
为了提高六螺旋桨直升机的载重量和抗风能力,本发明提供一种不全等六螺旋桨直升机,实现这一目标。
本发明解决其技术问题所采用的技术方案是:机身左前、右前、左后和右后各设置一个相同的定距螺旋桨,共四个相同的定距螺旋桨,这四个定距螺旋桨的旋转面水平,这四个定距螺旋桨的旋转中心的连线在水平面的投影是正方形或长方形,这四个定距螺旋桨在该水平正方形或长方形的四个顶角上,该正方形或长方形的中心在水平面的投影在机身的重心上或在重心略后,该正方形或长方形的一条边垂直于机身纵轴、该边的邻边平行于机身纵轴,使在该水平正方形或长方形的四个顶角上的定距螺旋桨对称于机身纵轴。
这四个相同的定距螺旋桨中,一个左前定距螺旋桨在机身左前方,机身左边靠前设置一条前掠的左前臂,支撑左前定距螺旋桨,一个左后定距螺旋桨在机身左后方,机身左边靠后设置一条后掠的左后臂,支撑左后定距螺旋桨,一个右前定距螺旋桨在机身右前方,机身右边靠前设置一条前掠的右前臂,支撑右前定距螺旋桨,一个右后定距螺旋桨在机身右后方,机身右边靠后设置一条后掠的右后臂,支撑右后定距螺旋桨。
机身顶部重心的上边设置中心螺旋桨,中心螺旋桨的旋转面水平,中心螺旋桨的旋转中心在水平面的投影在机身的重心上或在重心略后。
机身尾部设置一个尾定距螺旋桨,尾定距螺旋桨的旋转面垂直或近似垂直于中心螺旋桨的旋转面,且与机身纵轴平行。
机身下靠近重心附近设置起落架。
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨是完全相同的定距螺旋桨。
中心定距螺旋桨是与左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨不同的定距螺旋桨或变距螺旋桨,为方便说明,以定距螺旋桨为例子,中心定距螺旋桨是比左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨的尺寸更大的定距螺旋桨。
尾定距螺旋桨采用比中心定距螺旋桨尺寸小的定距螺旋桨。
设置左前定距螺旋桨和右后定距螺旋桨的旋转方向相同,右前定距螺旋桨和左后定距螺旋桨的旋转方向相同,左前定距螺旋桨和右前定距螺旋桨的旋转方向相反,左后定距螺旋桨和右后定距螺旋桨的旋转方向相反。
设置中心定距螺旋桨逆时针转,相应地,设置尾定距螺旋桨桨叶转向底部向前推力向右,或者,设置中心定距螺旋桨顺时针转,相应地,设置尾定距螺旋桨桨叶转向底部向前推力向左。
左前定距螺旋桨、右前定距螺旋桨、右后定距螺旋桨、左后定距螺旋桨和中心定距螺旋桨的旋转面在水平面的投影相互不重叠。
设置四个相同的发动机分别驱动左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨,设置另一个发动机驱动中心定距螺旋桨,驱动中心定距螺旋桨的发动机的功率大于驱动左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨的发动机功率。
设置另一个发动机驱动尾定距螺旋桨。
由于中心定距螺旋桨的尺寸和驱动功率比左前定距螺旋桨、右前定距螺旋桨、右后定距螺旋桨、左后定距螺旋桨的大,中心定距螺旋桨提供大部分的升力和前飞动力,左前定距螺旋桨、右前定距螺旋桨、右后定距螺旋桨、左后定距螺旋桨主要负责操纵不全等六螺旋桨直升机的飞行姿态,降低了水平正方形或长方形顶角上的定距螺旋桨的操纵负荷,提高了抗风能力。
机身下靠近重心附近设置起落架。
全部采用电机驱动左前定距螺旋桨、右前定距螺旋桨、右后定距螺旋桨、左后定距螺旋桨、中心定距螺旋桨和尾定距螺旋桨,或者,采用电机驱动左前定距螺旋桨、右前定距螺旋桨、右后定距螺旋桨、左后定距螺旋桨、尾定距螺旋桨,采用燃油发动机驱动中心定距螺旋桨的油电混合方法,提高载重能力和续航时间。
不全等六螺旋桨直升机的飞行原理是:设左前定距螺旋桨和右后定距螺旋桨顺时针转,右前定距螺旋桨和左后定距螺旋桨逆时针转。
中心定距螺旋桨逆时针转。
尾定距螺旋桨桨叶转向底部向前推力向右。
在左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中心定距螺旋桨和尾定距螺旋桨转动时,当左前定距螺旋桨和右后定距螺旋桨的反扭矩之和等于右前定距螺旋桨、左后定距螺旋桨的反扭矩之和,左前定距螺旋桨、右后定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨的反扭矩相互抵消,中心定距螺旋桨的反扭矩等于尾定距螺旋桨的推力矩时,中心定距螺旋桨的反扭矩与尾定距螺旋桨的推力矩相互抵消,不全等六螺旋桨直升机保持航向稳定。
加大六个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中心定距螺旋桨和尾定距螺旋桨的转速增加,五个旋转面水平的定距螺旋桨的升力加大,当总升力大于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机垂直上升。
减少六个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中心定距螺旋桨和尾定距螺旋桨的转速减少,五个旋转面水平的定距螺旋桨的升力减少,当总升力等于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机悬停。
继续减少六个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中心定距螺旋桨和尾定距螺旋桨的转速减少,五个旋转面水平的定距螺旋桨的升力减少,当总升力小于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机垂直下降。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨、左后定距螺旋桨的转速,左前定距螺旋桨、左后定距螺旋桨的升力增大,同时,相同减少右前定距螺旋桨、右后定距螺旋桨的转速,右前定距螺旋桨、右后定距螺旋桨的升力减少,使机身向右横滚,在操纵向右横滚的过程中,左前定距螺旋桨、左后定距螺旋桨的转速增大,升力增大,反扭矩增大,由于左前定距螺旋桨顺时针转、左后定距螺旋桨逆时针转,左前定距螺旋桨和左后定距螺旋桨的反扭矩相互抵消,右前定距螺旋桨、右后定距螺旋桨的转速减少,升力减少,反扭矩减少,由于右前定距螺旋桨逆时针转、右后定距螺旋桨顺时针转,右前定距螺旋桨和右后定距螺旋桨的反扭矩相互抵消,操纵向右横滚时航向保持稳定;相同减少左前定距螺旋桨、左后定距螺旋桨的转速,左前定距螺旋桨、左后定距螺旋桨的升力减少,同时,相同增大右前定距螺旋桨、右后定距螺旋桨的转速,右前定距螺旋桨、右后定距螺旋桨的升力增大,使机身向左横滚,在操纵向左横滚的过程中,左前定距螺旋桨、左后定距螺旋桨的转速减少,升力减少,反扭矩减少,由于左前定距螺旋桨顺时针转、左后定距螺旋桨逆时针转,左前定距螺旋桨和左后定距螺旋桨的反扭矩相互抵消,右前定距螺旋桨、右后定距螺旋桨的转速增大,升力增大,反扭矩增大,由于右前定距螺旋桨逆时针转、右后定距螺旋桨顺时针转,右前定距螺旋桨和右后定距螺旋桨的反扭矩相互抵消,操纵向右横滚时航向保持稳定,实现横滚操纵。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨、右前定距螺旋桨的转速,左前定距螺旋桨、右前定距螺旋桨的升力增大,同时,相同减少左后定距螺旋桨、右后定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨的升力减少,使机身后仰,在操纵后仰的过程中,左前定距螺旋桨、右前定距螺旋桨的转速增大,升力增大,反扭矩增大,由于左前定距螺旋桨顺时针转、右前定距螺旋桨逆时针转,左前定距螺旋桨和右前定距螺旋桨的反扭矩相互抵消,左后定距螺旋桨、右后定距螺旋桨的转速减少,升力减少,反扭矩减少,由于左后定距螺旋桨逆时针转、右后定距螺旋桨顺时针转,左后定距螺旋桨和右后定距螺旋桨的反扭矩相互抵消,操纵后仰时航向保持稳定;相同减少左前定距螺旋桨、右前定距螺旋桨的转速,左前定距螺旋桨、右前定距螺旋桨的升力减少,同时,相同增大左后定距螺旋桨、右后定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨的升力增大,使机身前俯,在操纵前俯的过程中,左前定距螺旋桨、右前定距螺旋桨的转速减少,升力减少,反扭矩减少,由于左前定距螺旋桨顺时针转、右前定距螺旋桨逆时针转,左前定距螺旋桨和右前定距螺旋桨的反扭矩相互抵消,左后定距螺旋桨、右后定距螺旋桨的转速增大,升力增大,反扭矩增大,由于左后定距螺旋桨逆时针转、右后定距螺旋桨顺时针转,左后定距螺旋桨和右后定距螺旋桨的反扭矩相互抵消,操纵前俯时航向保持稳定,实现俯仰操纵。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨、右后定距螺旋桨的转速,左前定距螺旋桨、右后定距螺旋桨的升力增大,反扭矩增大,由于左前定距螺旋桨顺时针转、右后定距螺旋桨顺时针转,左前定距螺旋桨和右后定距螺旋桨的反扭矩和增大,同时,相同减少右前定距螺旋桨、左后定距螺旋桨的转速,右前定距螺旋桨、左后定距螺旋桨的升力减少,反扭矩减少,由于右前定距螺旋桨逆时针转、左后定距螺旋桨逆时针转,右前定距螺旋桨和左后定距螺旋桨的反扭矩和减少,左前定距螺旋桨和右后定距螺旋桨的反扭矩和大于右前定距螺旋桨和左后定距螺旋桨的反扭矩和,反扭矩使机身逆时针转,即向左转,在操纵向左转向的过程中,左前定距螺旋桨、右后定距螺旋桨的升力增大,右前定距螺旋桨、左后定距螺旋桨的升力减少,左前定距螺旋桨、右后定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨的升力和不变,操纵向右转向时垂直方向保持稳定;相同减少左前定距螺旋桨、右后定距螺旋桨的转速,左前定距螺旋桨、右后定距螺旋桨的升力减少,反扭矩减少,由于左前定距螺旋桨顺时针转、右后定距螺旋桨顺时针转,左前定距螺旋桨和右后定距螺旋桨的反扭矩和减少,同时,相同增大右前定距螺旋桨、左后定距螺旋桨的转速,右前定距螺旋桨、左后定距螺旋桨的升力增大,反扭矩增大,由于右前定距螺旋桨逆时针转、左后定距螺旋桨逆时针转,右前定距螺旋桨和左后定距螺旋桨的反扭矩和增大,左前定距螺旋桨和右后定距螺旋桨的反扭矩和小于右前定距螺旋桨和左后定距螺旋桨的反扭矩和,反扭矩使机身顺时针转,即向右转,在操纵向右转向的过程中,左前定距螺旋桨、右后定距螺旋桨的升力减少,右前定距螺旋桨、左后定距螺旋桨的升力增大,左前定距螺旋桨、右后定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨的升力和不变,操纵向左转向时垂直方向保持稳定,实现航向操纵。
航向的另一种操纵方式是由尾定距螺旋桨操纵,中心定距螺旋桨的反扭矩等于尾定距螺旋桨的推力矩时,不全等六螺旋桨直升机保持航向稳定,当中心定距螺旋桨的反扭矩大于尾定距螺旋桨的推力矩时,由于中心定距螺旋桨逆时针转,使机身顺时针转,即使机身向右转向,当中心定距螺旋桨的反扭矩小于尾定距螺旋桨的推力矩时,由于尾定距螺旋桨的推力向右,尾定距螺旋桨的推力矩是使机身逆时针转,即使机身向左转向,实现航向操纵。
当不全等六螺旋桨直升机在空中时,操纵机身前俯,同时加大六个发动机的油门,不全等六螺旋桨直升机向前飞行;操纵机身后仰,同时加大六个发动机的油门,不全等六螺旋桨直升机向后飞行;操纵机身前俯和向左旋转方向,同时加大六个发动机的油门,不全等六螺旋桨直升机向左前方飞行;操纵机身前俯和向右旋转方向,同时加大六个发动机的油门,不全等六螺旋桨直升机向右前方飞行;操纵机身向左横滚,同时加大六个发动机的油门,不全等六螺旋桨直升机向左侧飞行;操纵机身向右横滚,同时加大六个发动机的油门,不全等六螺旋桨直升机向右侧飞行。
本发明的有益效果是,由于设置了中心定距螺旋桨,中心定距螺旋桨提供大部分的升力,载重量提高了,减轻了左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨操纵航向、俯仰和横滚的负荷,同时减轻了支撑左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨的机臂的重量,提高了左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨操纵航向、俯仰和横滚的灵敏度,尾定距螺旋桨参与操纵航向,使航向更稳定,并提高了俯仰和横滚的控制能力,允许重心变化的范围增大,并提高了抗风能力,具有结构紧凑,载重量大的优点,适合在狭窄的空间长时间飞行。
附图说明
下面结合附图和实施例对本发明进一步说明。
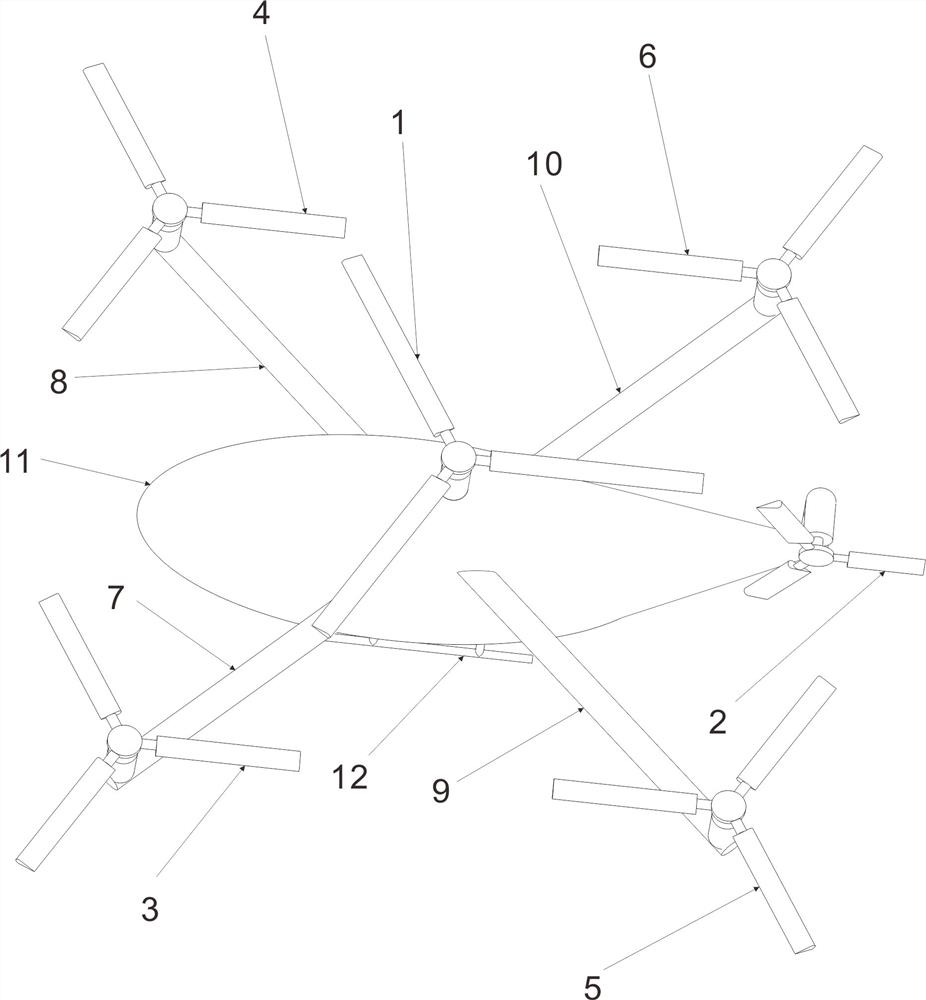
图1是本发明第一个实施例的轴测图。
图2是本发明第一个实施例的飞行原理图。
图3是本发明第二个实施例轴测图。
图4是本发明第二个实施例的飞行原理图。
图中1. 中心定距螺旋桨,2. 尾定距螺旋桨,3. 左前定距螺旋桨,4. 右前定距螺旋桨,5. 左后定距螺旋桨,6. 右后定距螺旋桨,7. 左前臂,8. 右前臂,9.左后臂,10. 右后臂,11. 机身,12. 起落架,13. 左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨的旋转中心的连线在水平面的投影构成的正方形,14. 左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨的旋转中心的连线在水平面的投影构成的长方形,101. 中心定距螺旋桨的旋转中心,103. 左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨的旋转中心的连线在水平面的投影构成的正方形的中心,104. 左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨的旋转中心的连线在水平面的投影构成的长方形的中心,303. 左前定距螺旋桨的旋转中心,404. 右前定距螺旋桨的旋转中心,505. 左后定距螺旋桨的旋转中心,606. 右后定距螺旋桨的旋转中心,X. 机身纵轴,T. 尾定距螺旋桨的推力方向,S. 螺旋桨顺时针转,N.螺旋桨逆时针转,P.重心。
具体实施方式
图1所示实施例中,一个左前定距螺旋桨3在机身11左前方,机身11左边靠前设置一条前掠的左前臂7,支撑左前定距螺旋桨3,一个左后定距螺旋桨5在机身11左后方,机身11左边靠后设置一条后掠的左后臂9,支撑左后定距螺旋桨5,一个右前定距螺旋桨4在机身11右前方,机身11右边靠前设置一条前掠的右前臂8,支撑右前定距螺旋桨4,一个右后定距螺旋桨6在机身11右后方,机身11右边靠后设置一条后掠的右后臂10,支撑右后定距螺旋桨6。
左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的旋转面水平设置,参见图2,左前定距螺旋桨的旋转中心303、右前定距螺旋桨的旋转中心404、左后定距螺旋桨的旋转中心505和右后定距螺旋桨的旋转中心606在水平面的投影的连线是正方形13,正方形13的一条边垂直于机身纵轴X、该边的邻边平行于机身纵轴X,正方形的中心103在水平面的投影与重心P重叠或略靠后,为了方便画图,以正方形的中心103在水平面的投影在重心P略靠后为例子。
机身11顶部重心P的上边设置中心定距螺旋桨1,中心定距螺旋桨1的旋转面水平,中心定距螺旋桨的旋转中心101在水平面的投影与重心P重叠或略靠后,为了方便画图,以中心定距螺旋桨的旋转中心101在水平面的投影在重心P略靠后为例子。
机身11尾部设置一个尾定距螺旋桨2,尾定距螺旋桨2的旋转面垂直或近似垂直于中心螺旋桨1的旋转面,为了方便画图,以尾定距螺旋桨2的旋转面垂直于中心螺旋桨1的旋转面为例子。且与机身纵轴X平行。
左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6是完全相同的定距螺旋桨;中心定距螺旋桨1是与左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6不同的定距螺旋桨,中心定距螺旋桨1是比左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的尺寸更大的定距螺旋桨,尾定距螺旋桨2的尺寸比中心定距螺旋桨1的尺寸小。
设置左前定距螺旋桨3顺时针转S,右前定距螺旋桨4逆时针转N,左后定距螺旋桨5逆时针转N,右后定距螺旋桨6顺时针转S,中心定距螺旋桨1逆时针转N,设置尾定距螺旋桨2桨叶转向底部向前推力T向右。
左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的旋转面在水平面的投影相互不重叠。
左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6和中心定距螺旋桨1的旋转面在水平面的投影相互不重叠。
设置四个相同的发动机分别驱动左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6,设置另一个不相同的发动机驱动中心定距螺旋桨1,驱动中心定距螺旋桨1的发动机的功率大于驱动左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的发动机的功率。
由于中心定距螺旋桨1的尺寸和驱动功率比左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的大,中心定距螺旋桨1提供大部分的升力。
设置另一个发动机驱动尾定距螺旋桨2。
机身11下靠近重心P附近设置起落架12。
在左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6、中心定距螺旋桨1和尾定距螺旋桨2转动时,当左前定距螺旋桨3和右后定距螺旋桨6的反扭矩之和等于右前定距螺旋桨4、左后定距螺旋桨5的反扭矩之和,左前定距螺旋桨3、右后定距螺旋桨6、右前定距螺旋桨4、左后定距螺旋桨5的反扭矩相互抵消,中心定距螺旋桨1的反扭矩等于尾定距螺旋桨2的推力矩时,中心定距螺旋桨1的反扭矩与尾定距螺旋桨2的推力矩相互抵消,不全等六螺旋桨直升机保持航向稳定。
加大六个发动机的油门,使左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6、中心定距螺旋桨1和尾定距螺旋桨2的转速增加,五个旋转面水平的定距螺旋桨的升力加大,当总升力大于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机垂直上升。
减少六个发动机的油门,使左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6、中心定距螺旋桨1和尾定距螺旋桨2的转速减少,五个旋转面水平的定距螺旋桨的升力减少,当总升力等于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机悬停。
继续减少六个发动机的油门,使左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6、中心定距螺旋桨1和尾定距螺旋桨2的转速减少,五个旋转面水平的定距螺旋桨的升力减少,当总升力小于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机垂直下降。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨3、左后定距螺旋桨5的转速,左前定距螺旋桨3、左后定距螺旋桨5的升力增大,同时,相同减少右前定距螺旋桨4、右后定距螺旋桨6的转速,右前定距螺旋桨4、右后定距螺旋桨6的升力减少,使机身11向右横滚;相同减少左前定距螺旋桨3、左后定距螺旋桨5的转速,左前定距螺旋桨3、左后定距螺旋桨5的升力减少,同时,相同增大右前定距螺旋桨4、右后定距螺旋桨6的转速,右前定距螺旋桨4、右后定距螺旋桨6的升力增大,使机身11向左横滚,实现横滚操纵。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨3、右前定距螺旋桨4的转速,左前定距螺旋桨3、右前定距螺旋桨4的升力增大,同时,相同减少左后定距螺旋桨5、右后定距螺旋桨6的转速,左后定距螺旋桨5、右后定距螺旋桨6的升力减少,使机身11后仰;相同减少左前定距螺旋桨3、右前定距螺旋桨4的转速,左前定距螺旋桨3、右前定距螺旋桨4的升力减少,同时,相同增大左后定距螺旋桨5、右后定距螺旋桨6的转速,左后定距螺旋桨5、右后定距螺旋桨6的升力增大,使机身11前俯,实现俯仰操纵。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨3、右后定距螺旋桨6的转速,左前定距螺旋桨3、右后定距螺旋桨6的升力增大,反扭矩增大,由于左前定距螺旋桨3顺时针转S、右后定距螺旋桨6顺时针转S,左前定距螺旋桨3和右后定距螺旋桨6的反扭矩和增大,同时,相同减少右前定距螺旋桨4、左后定距螺旋桨的转速5,右前定距螺旋桨4、左后定距螺旋桨5的升力减少,反扭矩减少,由于右前定距螺旋桨4逆时针转N、左后定距螺旋桨5逆时针转N,右前定距螺旋桨4和左后定距螺旋桨5的反扭矩和减少,左前定距螺旋桨3和右后定距螺旋桨6的反扭矩和大于右前定距螺旋桨4和左后定距螺旋桨5的反扭矩和,反扭矩使机身11逆时针转N,即向左转;相同减少左前定距螺旋桨3、右后定距螺旋桨6的转速,左前定距螺旋桨3、右后定距螺旋桨6的升力减少,反扭矩减少,由于左前定距螺旋桨3顺时针转S、右后定距螺旋桨6顺时针转S,左前定距螺旋桨3和右后定距螺旋桨6的反扭矩和减少,同时,相同增大右前定距螺旋桨4、左后定距螺旋桨5的转速,右前定距螺旋桨4、左后定距螺旋桨5的升力增大,反扭矩增大,由于右前定距螺旋桨4逆时针转N、左后定距螺旋桨5逆时针转N,右前定距螺旋桨4和左后定距螺旋桨5的反扭矩和增大,左前定距螺旋桨3和右后定距螺旋桨6的反扭矩和小于右前定距螺旋桨4和左后定距螺旋桨5的反扭矩和,反扭矩使机身11顺时针转S,即向右转,实现航向操纵。
航向的另一种操纵方式是由尾定距螺旋桨2操纵,中心定距螺旋桨1的反扭矩等于尾定距螺旋桨2的推力矩时,不全等六螺旋桨直升机保持航向稳定,当中心定距螺旋桨1的反扭矩大于尾定距螺旋桨2的推力矩时,由于中心定距螺旋桨1逆时针转N,中心定距螺旋桨1使机身11顺时针转S,即使机身11向右转向,当中心定距螺旋桨1的反扭矩小于尾定距螺旋桨2的推力矩时,由于尾定距螺旋桨2的推力向右,尾定距螺旋桨2的推力矩使机身11逆时针转N,即使机身11向左转向,实现航向操纵。
当不全等六螺旋桨直升机在空中时,操纵机身11前俯,同时加大六个发动机的油门,不全等六螺旋桨直升机向前飞行;操纵机身11后仰,同时加大六个发动机的油门,不全等六螺旋桨直升机向后飞行;操纵机身11前俯和向左旋转方向,同时加大六个发动机的油门,不全等六螺旋桨直升机向左前方飞行;操纵机身前11俯和向右旋转方向,同时加大六个发动机的油门,不全等六螺旋桨直升机向右前方飞行;操纵机身11向左横滚,同时加大六个发动机的油门,不全等六螺旋桨直升机向左侧飞行;操纵机身11向右横滚,同时加大六个发动机的油门,不全等六螺旋桨直升机向右侧飞行。
图3所示实施例中,一个左前定距螺旋桨3在机身11左前方,机身11左边靠前设置一条前掠的左前臂7,支撑左前定距螺旋桨3,一个左后定距螺旋桨5在机身11左后方,机身11左边靠后设置一条后掠的左后臂9,支撑左后定距螺旋桨5,一个右前定距螺旋桨4在机身11右前方,机身11右边靠前设置一条前掠的右前臂8,支撑右前定距螺旋桨4,一个右后定距螺旋桨6在机身11右后方,机身11右边靠后设置一条后掠的右后臂10,支撑右后定距螺旋桨6。
左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的旋转面水平设置,参见图4,左前定距螺旋桨的旋转中心303、右前定距螺旋桨的旋转中心404、左后定距螺旋桨的旋转中心505和右后定距螺旋桨的旋转中心606在水平面的投影的连线是长方形14,长方形14的一条边垂直于机身纵轴X,该边的邻边平行于机身纵轴X(图4中,长方形14的短边垂直于机身纵轴X,长方形14的长边平行于机身纵轴X),长方形14的中心104在水平面的投影与重心P重叠或略靠后,为了方便画图,以长方形的中心104在水平面的投影在重心P略靠后为例子。
机身11顶部重心P的上边设置中心定距螺旋桨1,中心定距螺旋桨1的旋转面水平,中心定距螺旋桨的旋转中心101在水平面的投影与重心P重叠或略靠后,为了方便画图,以中心定距螺旋桨的旋转中心101在水平面的投影在重心P略靠后为例子。
机身11尾部设置一个尾定距螺旋桨2,尾定距螺旋桨2的旋转面垂直或近似垂直于中心螺旋桨1的旋转面,为了方便画图,以尾定距螺旋桨2的旋转面垂直于中心螺旋桨1的旋转面为例子。且与机身纵轴X平行。
左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6是完全相同的定距螺旋桨;中心定距螺旋桨1是与左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6不同的定距螺旋桨,中心定距螺旋桨1是比左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的尺寸更大的定距螺旋桨,尾定距螺旋桨2的尺寸比中心定距螺旋桨1的尺寸小。
设置左前定距螺旋桨3顺时针转S,右前定距螺旋桨4逆时针转N,左后定距螺旋桨5逆时针转N,右后定距螺旋桨6顺时针转S,中心定距螺旋桨1逆时针转N,设置尾定距螺旋桨2桨叶转向底部向前推力T向右。
左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6和中心定距螺旋桨1的旋转面在水平面的投影相互不重叠。
设置四个相同的发动机分别驱动左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6,设置另一个相同的发动机驱动中心定距螺旋桨1,驱动中心定距螺旋桨1的发动机的功率大于驱动左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的发动机的功率。
由于中心定距螺旋桨1的尺寸和驱动功率比左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5和右后定距螺旋桨6的大,中心定距螺旋桨1提供大部分的升力。
设置另一个发动机驱动尾定距螺旋桨2。
机身11下靠近重心P附近设置起落架12。
在左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6、中心定距螺旋桨1和尾定距螺旋桨2转动时,当左前定距螺旋桨3和右后定距螺旋桨6的反扭矩之和等于右前定距螺旋桨4、左后定距螺旋桨5的反扭矩之和,左前定距螺旋桨3、右后定距螺旋桨6、右前定距螺旋桨4、左后定距螺旋桨5的反扭矩相互抵消,中心定距螺旋桨1的反扭矩等于尾定距螺旋桨2的推力矩时,中心定距螺旋桨1的反扭矩与尾定距螺旋桨2的推力矩相互抵消,不全等六螺旋桨直升机保持航向稳定。
加大六个发动机的油门,使左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6、中心定距螺旋桨1和尾定距螺旋桨2的转速增加,五个旋转面水平的定距螺旋桨的升力加大,当总升力大于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机垂直上升。
减少六个发动机的油门,使左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6、中心定距螺旋桨1和尾定距螺旋桨2的转速减少,五个旋转面水平的定距螺旋桨的升力减少,当总升力等于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机悬停。
继续减少六个发动机的油门,使左前定距螺旋桨3、右前定距螺旋桨4、左后定距螺旋桨5、右后定距螺旋桨6、中心定距螺旋桨1和尾定距螺旋桨2的转速减少,五个旋转面水平的定距螺旋桨的升力减少,当总升力小于不全等六螺旋桨直升机的重量时,不全等六螺旋桨直升机垂直下降。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨3、左后定距螺旋桨5的转速,左前定距螺旋桨3、左后定距螺旋桨5的升力增大,同时,相同减少右前定距螺旋桨4、右后定距螺旋桨6的转速,右前定距螺旋桨4、右后定距螺旋桨6的升力减少,使机身11向右横滚;相同减少左前定距螺旋桨3、左后定距螺旋桨5的转速,左前定距螺旋桨3、左后定距螺旋桨5的升力减少,同时,相同增大右前定距螺旋桨4、右后定距螺旋桨6的转速,右前定距螺旋桨4、右后定距螺旋桨6的升力增大,使机身11向左横滚,实现横滚操纵。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨3、右前定距螺旋桨4的转速,左前定距螺旋桨3、右前定距螺旋桨4的升力增大,同时,相同减少左后定距螺旋桨5、右后定距螺旋桨6的转速,左后定距螺旋桨5、右后定距螺旋桨6的升力减少,使机身11后仰;相同减少左前定距螺旋桨3、右前定距螺旋桨4的转速,左前定距螺旋桨3、右前定距螺旋桨4的升力减少,同时,相同增大左后定距螺旋桨5、右后定距螺旋桨6的转速,左后定距螺旋桨5、右后定距螺旋桨6的升力增大,使机身11前俯,实现俯仰操纵。
当不全等六螺旋桨直升机在空中时,相同加大左前定距螺旋桨3、右后定距螺旋桨6的转速,左前定距螺旋桨3、右后定距螺旋桨6的升力增大,反扭矩增大,由于左前定距螺旋桨3顺时针转S、右后定距螺旋桨6顺时针转S,左前定距螺旋桨3和右后定距螺旋桨6的反扭矩和增大,同时,相同减少右前定距螺旋桨4、左后定距螺旋桨的转速5,右前定距螺旋桨4、左后定距螺旋桨5的升力减少,反扭矩减少,由于右前定距螺旋桨4逆时针转N、左后定距螺旋桨5逆时针转N,右前定距螺旋桨4和左后定距螺旋桨5的反扭矩和减少,左前定距螺旋桨3和右后定距螺旋桨6的反扭矩和大于右前定距螺旋桨4和左后定距螺旋桨5的反扭矩和,反扭矩使机身11逆时针转N,即向左转;相同减少左前定距螺旋桨3、右后定距螺旋桨6的转速,左前定距螺旋桨3、右后定距螺旋桨6的升力减少,反扭矩减少,由于左前定距螺旋桨3顺时针转S、右后定距螺旋桨6顺时针转S,左前定距螺旋桨3和右后定距螺旋桨6的反扭矩和减少,同时,相同增大右前定距螺旋桨4、左后定距螺旋桨5的转速,右前定距螺旋桨4、左后定距螺旋桨5的升力增大,反扭矩增大,由于右前定距螺旋桨4逆时针转N、左后定距螺旋桨5逆时针转N,右前定距螺旋桨4和左后定距螺旋桨5的反扭矩和增大,左前定距螺旋桨3和右后定距螺旋桨6的反扭矩和小于右前定距螺旋桨4和左后定距螺旋桨5的反扭矩和,反扭矩使机身11顺时针转S,即向右转,实现航向操纵。
航向的另一种操纵方式是由尾定距螺旋桨2操纵,中心定距螺旋桨1的反扭矩等于尾定距螺旋桨2的推力矩时,不全等六螺旋桨直升机保持航向稳定,当中心定距螺旋桨1的反扭矩大于尾定距螺旋桨2的推力矩时,由于中心定距螺旋桨1逆时针转N,中心定距螺旋桨1的反扭矩使机身11顺时针转S,即使机身11向右转向,当中心定距螺旋桨1的反扭矩小于尾定距螺旋桨2的推力矩时,由于尾定距螺旋桨2的推力向右,尾定距螺旋桨2的推力矩使机身11逆时针转N,即使机身11向左转向,实现航向操纵。
当不全等六螺旋桨直升机在空中时,操纵机身11前俯,同时加大六个发动机的油门,不全等六螺旋桨直升机向前飞行;操纵机身11后仰,同时加大六个发动机的油门,不全等六螺旋桨直升机向后飞行;操纵机身11前俯和向左旋转方向,同时加大六个发动机的油门,不全等六螺旋桨直升机向左前方飞行;操纵机身前11俯和向右旋转方向,同时加大六个发动机的油门,不全等六螺旋桨直升机向右前方飞行;操纵机身11向左横滚,同时加大六个发动机的油门,不全等六螺旋桨直升机向左侧飞行;操纵机身11向右横滚,同时加大六个发动机的油门,不全等六螺旋桨直升机向右侧飞行。
- 不全等六螺旋桨直升机
- 包括振动阻尼器的直升机螺旋桨及用于修正该螺旋桨的方法