一种多域双定位误差消除的线路绘图方法
文献发布时间:2023-06-19 10:43:23
技术领域
本发明涉及一种绘图误差的消除方法,特别涉及一种多域双定位误差消除的线路绘图方法。
背景技术
配网工程中,工程施工完成后,对工程线路的复验及线路图形的绘制尤为重要,其准确性直接决定了工程决算的精细程度。以往,施工人员使用测距仪器对杆塔进行逐级测量,并绘制图纸,但受制于测试仪器的精度及人员责任心,测试的杆塔距离及绘制的图纸常存在较大误差。因此,亟需研发一种可以自动定位,自动测量,自动绘图的测试装备。
单一采用GPS定位进行绘制,其测试误差在累加后会造成不可接受的结果,单一使用UWB进行定位又不具备广域地图特性,故本项目主要研究一种基于UWB及GPS的双域的杆塔定位误差消除方法及线路图形绘制方法,该方法通过对杆塔加装UWB标定标签及GPS定位,实现杆塔的自动测距及图形自动绘制,实现施工后即测量绘制结束的功能。该方法可完全解决现有技术的测试误差大,绘图不精确的问题。
发明内容
本发明提供了一种多域双定位误差消除的线路绘图方法,利用UWB测距数据及GPS定位数据,提供一种简单可行的一种多域双定位误差消除的线路绘图方法。
为了达到上述目的,本发明采用了以下技术方案:
一种多域双定位误差消除的线路绘图方法,其具体包括如下步骤:
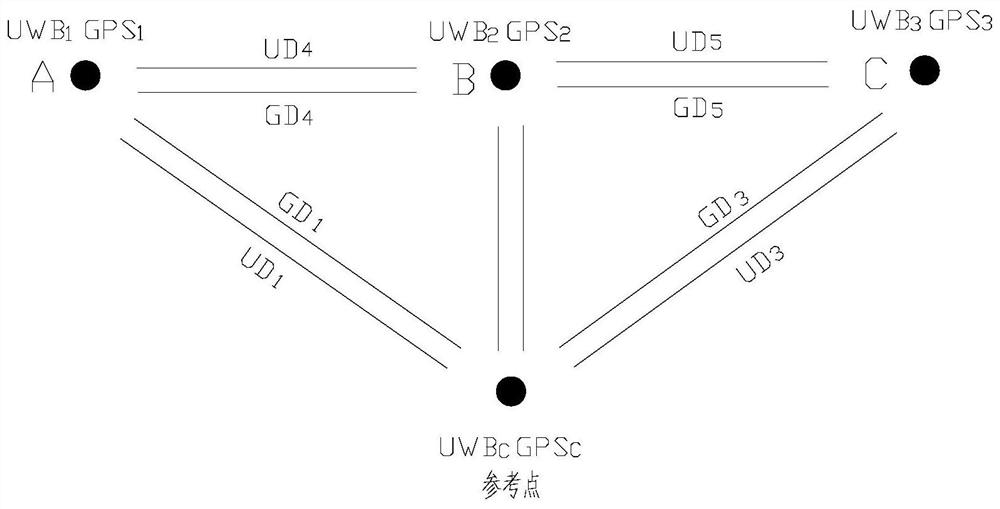
S1,从起始杆塔开始,选择三个杆塔,并将三个杆塔依次标注代号为A、B、C,在B点杆塔的附近选择一点作为参考点并标注代号为W;在A、B、C及W点每处都各放置一台GPS定位仪和一台UWB定位仪;GPS定位仪可与后台服务器进行数据通信,并在GPS定位地图上显示A、B、C和参考点W的定位标识;
S2,采集五组A、B、C和W点处的UWB及GPS数据;
S3,利用第一组UWB及GPS的数据,计算A-W、B-W、C-W、A-B、B-C的GPS距离,计算方法如下:
设两个点A、B以及坐标分别为A(x
计算后得出GPS坐标距离:GD1、GD2、GD3、GD4、GD5和UWB坐标距离:UD1、UD2、UD3、UD4、UD5;
计算距离差:ΔU1=GD1-UD1,ΔU2=GD2-UD2,ΔU3=GD3-UD3,ΔU4=GD4-UD4,ΔU5=GD5-UD5;
利用五组UWB及GPS的数据计算5次,形成5组数据,并计算5组数据的加权平均数得出Dp;
S4,进行ΔU1,ΔU2,ΔU3,ΔU4,ΔU5的正负值判断,然后按照Dp数据对GPS数据进行校正,例如:若ΔU 1为负值,则A点GPS向参考点WD1反方向移动Dp;若ΔU1为正值,A点GPS向参考点W移动Dp;
S5,后续杆塔的位置测绘,依据S1~S4的步骤重复进行即可。
与现有技术相比,本发明的有益效果是:
由于本发明提供了一种多域双定位误差消除的线路绘图方法,因此,在施工结束的杆塔竣工图绘制当中,在采用了本发明的方法以后,即可避免产生单一使用GPS定位或单一使用UWB定位方法的缺陷,极大地提高了杆塔竣工图的绘制精度,同时,实现了杆塔的自动测距及图形自动绘制的工作,极大地提高了绘制竣工图的工作效率,节省了人力、物力和工作时间。
附图说明
图1是本发明的绘图方法的计算原理示意图。
图2是本发明的双向测距方法计算原理示意图。
具体实施方式
下面结合附图对本发明的多域双定位误差消除的线路绘图方法的具体实施方式作进一步的详细说明。
如图1、图2所示,是本发明的绘图方法的计算原理示意图。
一种多域双定位误差消除的线路绘图方法,其具体包括如下步骤:
S1,从起始杆塔开始,选择三个杆塔,并将三个杆塔依次标注代号为A、B、C,在B点杆塔的附近选择一点作为参考点并标注代号为W;在A、B、C及W点每处都各放置一台GPS定位仪和一台UWB定位仪;GPS定位仪可与后台服务器进行数据通信,并在GPS定位地图上显示A、B、C和参考点W的定位标识;
S2,采集五组A、B、C和W点处的UWB及GPS数据;
S3,利用第一组UWB及GPS的数据,计算A-W、B-W、C-W、A-B、B-C的GPS距离,计算方法如下:
设两个点A、B以及坐标分别为A(x
计算后得出GPS坐标距离:GD1、GD2、GD3、GD4、GD5和UWB坐标距离:UD1、UD2、UD3、UD4、UD5;
计算距离差:ΔU1=GD1-UD1,ΔU2=GD2-UD2,ΔU3=GD3-UD3,ΔU4=GD4-UD4,ΔU5=GD5-UD5;
利用五组UWB及GPS的数据计算5次,形成5组数据,并计算5组数据的加权平均数得出Dp;
S4,进行ΔU1,ΔU2,ΔU3,ΔU4,ΔU5的正负值判断,然后按照Dp数据对GPS数据进行校正,例如:若ΔU 1为负值,则A点GPS向参考点WD1反方向移动Dp;若ΔU1为正值,A点GPS向参考点W移动Dp;
S5,后续杆塔的位置测绘,依据S1~S4的步骤重复进行即可。
UWB定位方法的计算如图2所示。
UWB双向测距TOA测量法不需要信标节点和目标节点的时钟保持同步,目标节点在t
TOA测量法通过测量信号在信标节点与目标节点之间的飞行时间来估算距离,由于UWB采用发射纳秒级的极窄脉冲进行数据的传输,具有很高的时间分辨率,因此,TOA测量法要优于其它方法,尤其是在室内多径密集环境下,TOA是最适合UWB定位的测距技术,也是本发明所采用的测距方法。
与现有技术相比,本发明的有益效果是:
由于本发明提供了一种多域双定位误差消除及线路绘制的方法,因此,在施工结束的杆塔竣工图绘制当中,采用了本发明的方法以后,即可避免产生单一使用GPS定位或单一使用UWB定位方法的缺陷,极大地提高了杆塔竣工图的绘制精度,同时,实现了杆塔的自动测距及图形自动绘制的工作,极大地提高了绘制竣工图的工作效率,节省了人力、物力和工作时间。
- 一种多域双定位误差消除的线路绘图方法
- 一种同杆并架双回直流输电线路双端行波故障定位方法