一种污水管道检测智能机器人及智能污水处理系统
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及管道检测技术领域,具体为一种污水管道检测智能机器人及智能污水处理系统。
背景技术
污水管道系统由收集和输送城市污水的管道及其附属构筑物组成,污水由支管流入干管,再流入主干管,最后流入污水处理厂,管道由小到大,分布类似河流,呈树枝状,与给水管网的环流贯通情况完全不同,污水在管道中一般是靠管道两端的水面差从高向低处流动,管道内部不承受压力,即靠重力流动,排水管道长期使用后,可能堆积淤泥和各种垃圾,且管壁可能受损,有的在对管道检测时,利用机器人进入到管道内部,通过操作机器人来对管道的内壁进行检测,提高了工作的效率。
目前的机器人位于管道内部,随着机器人的移动,机器人上的摄像头可以探测管道内部的整体情况,将内部的情况反馈到地面上的显示屏内,便于人们观察管道内部的情况,但是管道由于长时间的使用,其内部会堆积一些淤泥或者垃圾,这些因素不仅影响了机器人的移动,且淤泥或者垃圾遮挡了管道部分空间,使机器人容易出现漏检的情况,降低了管道检测的效果。
发明内容
本发明的目的在于提供一种污水管道检测智能机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种污水管道检测智能机器人,包括机体,所述机体底部设有驱动座,所述驱动座两侧均设有驱动机构,所述机体两侧均设有控制机构,两个所述控制机构呈对称分布,所述控制机构包括电机、滑动座和气缸,所述电机固定在所述滑动座内,且所述电机输出端固定连接有丝杆,所述丝杆外侧设有连接座,所述丝杆与所述连接座转动连接,且所述连接座固定在所述滑动座内,所述连接座内滑动连接有活动块,所述活动块与所述丝杆传动连接,所述活动块外侧端面固定连接有连接板,所述连接板底部固定连接有安装板,所述安装板通过安装螺栓固定连接有清理块,所述气缸输出端与所述滑动座固定连接,且所述气缸固定在所述机体侧壁上,所述机体两侧顶部均固定连接有第一侧板,所述驱动座两侧均固定连接有第二侧板,所述滑动座与所述第一侧板、所述第二侧板滑动连接。
进一步的,还包括控制箱,所述控制箱具有显示屏,所述机体上设有摄像头和照明灯,所述摄像头与所述显示屏信号连接,所述照明灯与所述控制箱信号连接。
进一步的,所述清理块前端面具有斜坡,所述清理块开设有两个凹槽,两个所述安装板分别插接在两个所述凹槽内。
进一步的,所述安装板开设有与所述安装螺栓相对应的通孔,且所述清理块开设有第二螺纹孔,所述安装螺栓与所述第二螺纹孔螺纹连接。
进一步的,所述连接座开设有空腔,所述活动块滑动在所述空腔内,且所述活动块开设有第一螺纹孔,所述丝杆与所述第一螺纹孔螺纹连接,所述电机输出端贯穿所述连接座,且所述电机输出端延伸至所述空腔内,所述空腔的长度是所述活动块高度的五倍。
进一步的,所述丝杆顶端固定连接有T形连接头,所述连接座开设有连接孔,且所述T形连接头与所述连接孔转动连接。
进一步的,所述滑动座为凵形状,且所述滑动座顶部和底部均固定连接有滑板,所述第一侧板开设有第一滑槽,所述第二侧板开设有第二滑槽,两个所述滑板分别滑动在所述第一滑槽和所述第二滑槽内。
进一步的,所述电机固定在所述滑动座内侧底部,所述连接座固定在所述滑动座内侧顶部。
进一步的,所述第一侧板和所述第二侧板的宽度相同,且所述连接板的宽度等于所述第一侧板的宽度。
一种污水管道检测智能机器人的使用方法,所示具体步骤如下:
S1:首先将机器人放置在管道内,驱动机构控制机器人的行走,当机器人在管道行驶的过程中,出现淤泥或者垃圾遮挡视野的情况下,由于清理块上具有斜坡,并且清理块能够与管道的内壁相贴合,可以随着机器人的移动,清理块将淤泥或者垃圾铲到一边,露出管道内遮挡的空间,从而可以清楚的观察管道内部的情况,避免淤泥或者垃圾遮挡了管道部分空间,使机器人容易出现漏检的情况,降低了管道检测效果的问题;
S2:其次若无遮挡视野的情况下,启动电机,电机带动丝杆转动,活动块在螺纹的作用下,能够在连接座内向上滑动,从而带动清理块向上运动,然后启动气缸,可以带动滑动座滑动,将清理块向后运动,对清理块进行位置固定;
S3:最后随着机器人移动,并且清理块位于机体的前侧,摄像头位于机体前侧上方位置,可以通过摄像头将管道内的画面传递到显示屏上,对管道内的情况进行观察检测。
一种智能智能污水处理系统,该智能智能污水处理系统包含使用有根据权利要求1-8任一所述的一种污水管道检测智能机器人。
与现有技术相比,本发明的有益效果是:
1、通过在机体上设置有清理块,当机器人在管道行驶的过程中,出现淤泥或者垃圾遮挡视野的情况下,由于清理块上具有斜坡,并且清理块能够与管道的内壁相贴合,可以随着机器人的移动,清理块将淤泥或者垃圾铲到一边,露出管道内遮挡的空间,从而可以清楚的观察管道内部的情况,避免淤泥或者垃圾遮挡了管道部分空间,使机器人容易出现漏检的情况,降低了管道检测效果的问题。
2、通过设置的安装板连接着清理块,可以拧动安装螺栓,使安装螺栓从通孔内分离,安装板离开清理块的凹槽,使清理块从机体上拆分下来,可以根据不同管道的内壁,更换与管道内壁相吻合的清理块,使清理块可以贴合着管道内壁,提高清理的效果。
3、通过设置的控制机构包括电机、滑动座和气缸,当清理块不使用时,可以启动电机,带动丝杆转动,使活动块能够在连接座内向上滑动,从而带动清理块向上运动,然后启动气缸,可以带动滑动座滑动,将清理块向后运动,对清理块进行位置固定,可以保证机器人在移动检测的过程中,清理块不会影响其运动。
4、通过设置的第一侧板和第二侧板,当滑动座运动时,滑动座上的滑板能够在第一侧板和第二侧板上的滑槽内滑动,使第一侧板和第二侧板能够定位滑动座的位置,使清理块稳定运动,并且第一侧板和第二侧板包围着气缸、连接座和电机,能够起到一定的保护作用。
附图说明
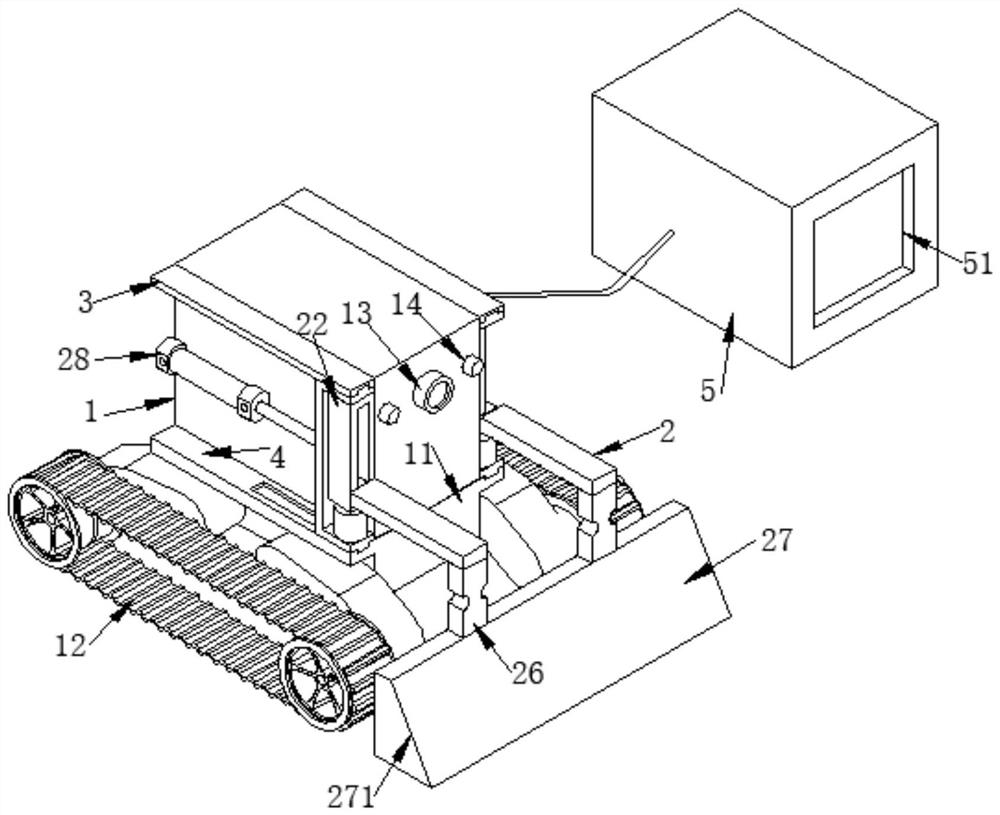
图1为本发明整体结构示意图;
图2为本发明的侧视图;
图3为本发明中控制机构的结构示意图;
图4为本发明中连接座内部的结构示意图;
图5为本发明中丝杆的结构示意图;
图6为本发明中清理块和安装板的结构示意图;
图7为本发明中清理块运动的状态示意图。
附图标记:1、机体;11、驱动座;12、驱动机构;13、摄像头;14、照明灯;2、控制机构;21、电机;211、丝杆;212、T形连接头;22、连接座;221、空腔;222、连接孔;23、活动块;231、第一螺纹孔;24、滑动座;241、滑板;25、连接板;26、安装板;261、通孔;27、清理块;271、斜坡;272、凹槽;273、第二螺纹孔;28、气缸;29、安装螺栓;3、第一侧板;301、第一滑槽;4、第二侧板;401、第二滑槽;5、控制箱;51、显示屏。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请一并参阅图1-图7,其中,一种污水管道检测智能机器人,包括机体1,机体1底部设有驱动座11,驱动座11两侧均设有驱动机构12,机体1两侧均设有控制机构2,两个控制机构2呈对称分布,控制机构2包括电机21、滑动座24和气缸28,电机21固定在滑动座24内,且电机21输出端固定连接有丝杆211,丝杆211外侧设有连接座22,丝杆211与连接座22转动连接,且连接座22固定在滑动座24内,连接座22内滑动连接有活动块23,活动块23与丝杆211传动连接,活动块23外侧端面固定连接有连接板25,连接板25底部固定连接有安装板26,安装板26通过安装螺栓29固定连接有清理块27,气缸28输出端与滑动座24固定连接,且气缸28固定在机体1侧壁上,机体1两侧顶部均固定连接有第一侧板3,驱动座11两侧均固定连接有第二侧板4,滑动座24与第一侧板3、第二侧板4滑动连接。
驱动座11两侧均设有驱动机构12,驱动座11用来作用驱动机构12运动,驱动机构12用来控制机器人的移动行走,驱动机构12包括轮子、连接臂和履带,可以通过马达连接着连接壁,使轮子转动,使履带可以控制着机器人运动,该技术为现有技术,这种方式可以减少路况对机器人的限制,避免了管道内的淤泥和垃圾影响机器人的移动;
当机器人在管道行驶的过程中,出现淤泥或者垃圾遮挡视野的情况下,由于清理块27上具有斜坡271,并且清理块27能够与管道的内壁相贴合,可以随着机器人的移动,清理块27将淤泥或者垃圾铲到一边,露出管道内遮挡的空间,从而可以清楚的观察管道内部的情况,避免淤泥或者垃圾遮挡了管道部分空间,使机器人容易出现漏检的情况,降低了管道检测效果的问题;
安装板26连接着清理块27,清理块27开设有两个凹槽272,两个安装板26分别插接在两个凹槽272内,便于清理块27安装定位,安装板26开设有与安装螺栓29相对应的通孔261,且清理块27开设有第二螺纹孔273,安装螺栓29与第二螺纹孔273螺纹连接,拧动安装螺栓29,使安装螺栓29从通孔261内分离,安装板26离开清理块27的凹槽272,使清理块27从机体1上拆分下来,可以根据不同管道的内壁,更换与管道内壁相吻合的清理块27,使清理块27可以贴合着管道内壁,提高清理的效果;
通过设置的控制机构2包括电机21、滑动座24和气缸28,电机21(型号YS-37GB520),气缸28(型号CDJ2B10),电机21和气缸28均与机体1内的蓄电池电性连接,并且可以设置开关按钮,对电机21和气缸28进行操控,电机21固定在滑动座24内侧底部,连接座22固定在滑动座24内侧顶部,使电机21和连接座22均固定在滑动座24内,可以便于进行清理块27的水平运动,当清理块27不使用时,可以启动电机21,电机21输出端贯穿连接座22,且电机21输出端延伸至空腔221内,空腔221的长度是活动块23高度的五倍,使活动块23在空腔221内有足够的空间活动,电机21连接着丝杆211,带动丝杆211转动,连接座22开设有空腔221,活动块23滑动在空腔221内,且活动块23开设有第一螺纹孔231,丝杆211与第一螺纹孔231螺纹连接,当丝杆211转动时,活动块23在螺纹的作用下,能够上下运动,丝杆211顶端固定连接有T形连接头212,连接座22开设有连接孔222,且T形连接头212与连接孔222转动连接,T形连接头212和连接孔222的配合,可以对丝杆211稳定连接,使其稳定的在连接座22内转动,使活动块23能够在连接座22内向上滑动,从而带动清理块27向上运动,然后启动气缸28,可以带动滑动座24滑动,滑动座24为凵形状,且滑动座24顶部和底部均固定连接有滑板241,第一侧板3开设有第一滑槽301,第二侧板4开设有第二滑槽401,两个滑板241分别滑动在第一滑槽301和第二滑槽401内,滑动座24上的滑板241能够在第一侧板3和第二侧板4上的滑槽内滑动,使第一侧板3和第二侧板4能够定位滑动座24的位置,使清理块27稳定运动,并且第一侧板3和第二侧板4包围着气缸28、连接座22和电机21,能够起到一定的保护作用,第一侧板3和第二侧板4的宽度相同,且连接板25的宽度等于第一侧板3的宽度,第一侧板3和第二侧板4可以通过一个平板封闭,保护结构,提高使用的寿命,将清理块27向后运动,对清理块27进行位置固定,可以保证机器人在移动检测的过程中,清理块27不会影响其运动;
控制箱5具有显示屏51,机体1上设有摄像头13和照明灯14,摄像头13与显示屏51信号连接,照明灯14与控制箱5信号连接,控制箱5能够控制机器人整体的运动,包括电机21和气缸28操控按钮能够设置在控制箱5上,摄像头13的作用是为了观察管道内部的情况,照明灯14是为了提高观察的环境,清楚观察管道的内壁,这些电性连接方式均为现有技术,在此不再做过多的赘述。
一些实施例中,清理块27的前端还可以呈弧形状,有利于推动淤泥或者垃圾向两侧移动,避免视线抵挡。
一些实施例中,所述控制机构2中气缸28可以两端均设置滑动座24,且两个滑动座24均可以旋转90°面向机体1外侧,一方面污水管道狭小不易掉头,需要反向清理是只需将清理块27放置在另一个滑动座24上,就可以实现反向清理;另一方面,当两个滑动座24均面向机体1外侧时,能够再滑动座24按照其他清理机构,便于对污水管道内壁进行清理,实现多功能清理。
如图1-图7所示,本发明还提供一种污水管道检测智能机器人的使用方法,所示具体步骤如下:
S1:首先将机器人放置在管道内,驱动机构12控制机器人的行走,当机器人在管道行驶的过程中,出现淤泥或者垃圾遮挡视野的情况下,由于清理块27上具有斜坡271,并且清理块27能够与管道的内壁相贴合,可以随着机器人的移动,清理块27将淤泥或者垃圾铲到一边,露出管道内遮挡的空间,从而可以清楚的观察管道内部的情况,避免淤泥或者垃圾遮挡了管道部分空间,使机器人容易出现漏检的情况,降低了管道检测效果的问题;
S2:其次若无遮挡视野的情况下,启动电机21,电机21带动丝杆211转动,活动块23在螺纹的作用下,能够在连接座22内向上滑动,从而带动清理块27向上运动,然后启动气缸28,可以带动滑动座24滑动,将清理块27向后运动,对清理块27进行位置固定;
S3:最后随着机器人移动,并且清理块27位于机体1的前侧,摄像头13位于机体1前侧上方位置,可以通过摄像头13将管道内的画面传递到显示屏51上,对管道内的情况进行观察检测。
一种智能智能污水处理系统,该智能智能污水处理系统包含使用有根据权利要求1-8任一所述的一种污水管道检测智能机器人。
综上所述,本发明提供的一种污水管道检测智能机器人,在工作时,将机器人放置在管道内,驱动机构12控制机器人的行走,当机器人在管道行驶的过程中,出现淤泥或者垃圾遮挡视野的情况下,由于清理块27上具有斜坡271,并且清理块27能够与管道的内壁相贴合,可以随着机器人的移动,清理块27将淤泥或者垃圾铲到一边,露出管道内遮挡的空间,从而可以清楚的观察管道内部的情况,避免淤泥或者垃圾遮挡了管道部分空间,使机器人容易出现漏检的情况,降低了管道检测效果的问题,通过摄像头13将管道内的画面传递到显示屏51上,可以观察管道内的情况,并且可以拧动安装螺栓29,使安装螺栓29从通孔261内分离,安装板26离开清理块27的凹槽272,使清理块27从机体1上拆分下来,可以根据不同管道的内壁,更换与管道内壁相吻合的清理块27,使清理块27可以贴合着管道内壁,提高清理的效果,当清理块27不使用时,可以启动电机21,电机21连接着丝杆211,带动丝杆211转动,活动块23在螺纹的作用下,能够在连接座22内向上滑动,从而带动清理块27向上运动,然后启动气缸28,可以带动滑动座24滑动,将清理块27向后运动,对清理块27进行位置固定,可以保证机器人在移动检测的过程中,清理块27不会影响其运动。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种污水管道检测智能机器人及智能污水处理系统
- 一种市政污水管网的污水净化智能处理系统