一种矿井水仓智能清淤方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及采矿工程和机器人设备技术领域,尤其是一种矿井水仓智能清淤方法。
背景技术
随着浅部煤炭资源的开采,煤矿开采已经向深部转移,这对煤矿开采的安全性和智能化都提出了新的要求。在深部开采中,尤其是西部地区软岩地质条件下,煤矿井下水沟的排水能量要求更高。尤其是在进行深部开采时,矿井用涌水量增加,水中的淤泥和碎石会造成水沟堵塞、影响排水,另外水仓内的淤泥堆积也会导致水仓的蓄水能力下降。目前对于中小型的水仓,其清理一般是需要将水抽干,然后进行清理,这种清理方式施工复杂,效率低,劳动强度大。由于井下水仓地形和尺寸的限制,一般无法使用大型工程机械进行机械化操作,也有的清理设备是设置在漂浮的平台上,这些设备大多需要人工操作,清洁效率低,成本高,还存在安全隐患。
为此需要适应智能化开采需要,提高水仓的清理效率,降低水仓清理成本,减少人工操作,对现有的矿井水仓清淤设备做进一步的改进。
发明内容
为了解决矿井水仓淤泥粘度大清理不方便的技术问题,降低人工劳动强度,提高清洁效率,降低清理成本,保证水仓清理安全,本发明提供了一种矿井水仓智能清淤方法,具体的技术方案如下。
一种矿井水仓智能清淤方法,利用一种矿井水仓智能清淤机器人进行矿井清淤,包括车体、驱动机构、铲斗机构、淤泥输送机构、探测机构和存储机构,所述驱动机构的履带式机构带动车体行走和转向,铲斗机构的掘泥铲斗通过液压杆和车体相连,淤泥输送机构安装在车体上;所述探测机构包括云摄像头和雷达装置,摄像头安装在车体上并沿摄像头安装部转动;所述淤泥输送机构和存储机构相连,存储机构配置在车体内,淤泥输送机构的泥水分离装置分离淤泥和污水,淤泥和污水分别存储至存储机构中;
其步骤包括:
S1.矿井水仓智能清淤机器人进入矿井水仓后,驱动机构带动车体在水仓内移动;
S2.探测结构转动摄像头探测矿井水仓内淤泥的位置,并反馈至控制装置;
S3.控制装置向驱动机构发送指令,车体移动至淤泥的位置,铲斗机构工作;
S4.铲斗机构的掘泥铲斗在液压转向装置和液压杆的控制下搬动工作;
S5.掘泥铲斗工作铲除淤泥后收纳至淤泥输送机构的淤泥输送板处,铲斗机构的移动挡板打开,高压水枪工作;
S6.淤泥输送机构将泥水混合物输送至泥水分离装置,泥水分离装置的分离压板上下运动,分离淤泥和污水;
S7.分离后的淤泥经过运泥通道输送至存储机构的储泥箱中,污水经过水管进入储水箱;
S8.驱动机构带动车体驶离矿井水仓,矿井水仓智能清淤机器人将淤泥排出。
优选的是,所述储泥箱内淤泥体积大于储泥箱总体积的80%后驱动机构带动车体驶离矿井水仓。
优选的是,铲斗机构设置在车体运行方向的前方,淤泥输送机构的淤泥输送板两侧设置有多个高压水枪,高压水枪通过高压管缆和储水箱相连,高压水枪的出水方向和淤泥输送方向相同。
优选的是,液压杆控制铲斗移动,液压杆通过液压转向装置固定在车体上,液压转向装置控制液压杆摆动。
优选的是,掘泥铲斗包括铲料斗、移动挡板和固定挡板,所述铲料斗两侧设置有固定挡板,铲料斗开口处设置有移动挡板。
进一步优选的是,泥水分离装置包括分离器、分离压板、过滤网、储污盒和淤泥输送管道,输送淤泥输送管道和分离器相连,分离压板沿分离器的分离室上下移动,分离器的下部设置有移动挡板和过滤网,储污盒上设置有污水出口。
进一步优选的是,分离器和分离压板上均设置有超声波震动装置,分离压板通过压缩油缸和车体相连。
进一步优选的是,存储机构包括储水箱和储泥箱,储泥箱和泥水分离装置的分离器底部之间设置有运泥通道,分离器的底板上设置有推泥板;储水箱通过水管和储污盒上的污水出口相连。
还进一步优选的是,车体内设置有温度计、湿度计和气压计,温度计、湿度计和气压计将监测信息传输至控制装置,控制装置控制车体内的气泵工作,维持车体内温度、湿度和气压的稳定。
本发明提供的一种矿井水仓智能清淤方法的有益效果包括:智能清淤机器人采用泥水混合物泵吸的方式清理淤泥,从而清淤更加方便,高压水枪出水输送淤泥保证了清理效率和清理安全;利用淤泥输送机构分离淤泥和污水,通过挤压可以快速分离,超声波振动装置的设置也方便了粘性淤泥的分离;车体使用履带式行走机构,增强移动性能,摄像头和控制装置配合方便了控制。另外机器人在清理过程中利用气体循环保证了车体内的湿度和气压稳定,存储机构能够及时排渣,实现了自动化的智能清理。
附图说明
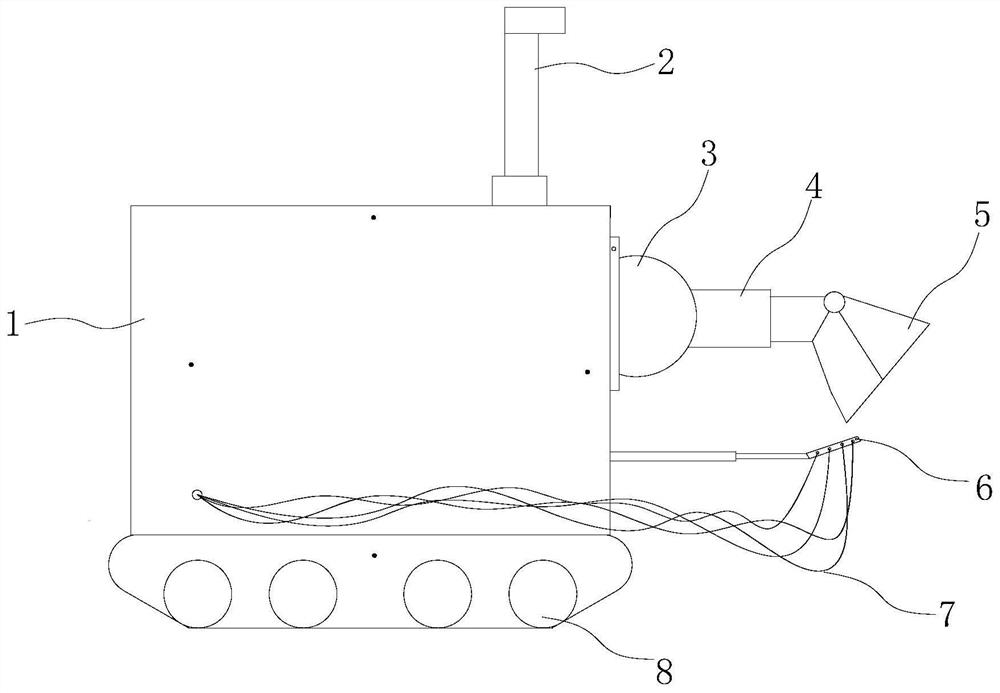
图1是一种矿井水仓智能清淤机器人的结构示意图;
图2是掘泥铲斗的结构示意图;
图3是泥水分离装置和存储机构的布置示意图;
图4是泥水分离装置的示意图;
图5是淤泥输送机构的结构示意图;
图中:1-车体,2-云摄像头,3-液压转向装置,4-液压杆,5-掘泥铲斗6-淤泥输送板,7-高压管缆,8-履带式机构,9-高压水枪,10-分离器,11-分离压板,12-过滤网,13-储污盒,14-淤泥输送管道,15-储水箱,16-储泥箱,17-铲料斗,18-移动挡板,19-固定挡板,20-压缩油缸。
具体实施方式
结合图1至图5所示,对本发明提供的一种矿井水仓智能清淤方法具体实施方式进行详细说明。
一种矿井水仓智能清淤机器人,包括车体、驱动机构、铲斗机构、淤泥输送机构、探测机构和存储机构,驱动机构能够为车体提供移动的动力,铲斗机构能够清理淤泥,淤泥输送机构吸收并运送泥水混合物,探测机构识别水仓环境并方便车体移动控制;淤泥输送机构和存储机构组合能够实现泥水混合物的输送和分离,探测机构配合铲斗机构和驱动机构工作能够保证机器人正常的行走运动。驱动机构的履带式机构带动车体行走和转向,具体是车体两侧的履带式机构1差速进行转向,铲斗机构的掘泥铲斗5通过液压杆和车体相连,铲斗可以实现升降、收缩和旋转,淤泥输送机构安装在车体上。探测机构包括云摄像头2和雷达装置,摄像头安装在车体上并沿摄像头安装部转动,雷达装置配置在车体的各个侧面,云摄像头2探测矿井水仓内的环境,雷达装置保证车体行走的安全,探测车体周围的环境。淤泥输送机构和存储机构相连,存储机构配置在车体内,淤泥输送机构的泥水分离装置分离淤泥和污水,淤泥和污水分别存储至存储机构中,从而可以利用车体实现淤泥和污水的运输。铲斗机构设置在车体运行方向的前方,淤泥输送机构的淤泥输送板6两侧设置有多个高压水枪9,高压水枪9通过高压管缆7和储水箱15相连,高压水枪9的出水方向和淤泥输送方向相同,高压水枪9喷射形成泥浆,淤泥输送机构泵吸该泥浆,从而完成水仓的清淤。
液压杆4控制铲斗移动,液压杆4通过液压转向装置固定在车体上,液压转向装置3控制液压杆4摆动,液压杆4和液压转向装置3的配合可以实现铲斗的摆动,快速的清理水仓淤泥。掘泥铲斗包括铲料斗17、移动挡板18和固定挡板19,铲料斗17两侧设置有固定挡板,铲料斗开口处设置有移动挡板。
泥水分离装置包括分离器10、分离压板11、过滤网12、储污盒13和淤泥输送管道14,其中分离器10可以呈方形,内侧设置栅栏,分离压板11的形状和分离器的断面形状相同,输送淤泥输送管道14和分离器10相连,分离压板11沿分离器的分离室上下移动,分离器10的下部设置有移动挡板和过滤网,储污盒13上设置有污水出口。泥水分离装置通过挤压,依靠滤布将水分滤出,机构简单。分离器10和分离压板11上均设置有超声波震动装置,分离压板通过压缩油缸20和车体1相连。
存储机构包括储水箱15和储泥箱16,储泥箱15和泥水分离装置的分离器10底部之间设置有运泥通道,分离器10的底板上设置有推泥板,推泥板运动将淤泥从运泥通道推至储泥箱内。储泥箱16内可以设置感应器,从而可以准确的确定储泥箱内的淤泥量,及时清理。储水箱通过水管和储污盒上的污水出口相连,实现污水的储存。
车体1内部密封,在车体1上配置有出气孔和进气孔,车体1内安装有气泵,气泵的出口车体的进气孔相连,出气孔的位置设置有单向阀。车体内的气体循环系统,由进出气孔单向阀与气泵组成,使车体内的气压、湿度和温度都维持在稳定状态,从而保持机器整体运作的可靠性。
矿井水仓智能清淤机器人将水仓中的泥水混合物通过淤泥输送机构泵吸泥浆,并在车体内完成过滤、分类、压实,另外还对污水进行二次利用,当车体内淤泥达到限量时,及时将其运离水仓。利用该智能清淤机器人能够高效、安全、方便的进行淤泥清理,有效减少了清理水仓过程中所用的人工劳动力,提高了清理过程中的安全系数,最大限度的提高了水仓的容水量。
一种矿井水仓智能清淤方法,利用上述的一种矿井水仓智能清淤机器人,步骤包括:
S1.矿井水仓智能清淤机器人进入矿井水仓后,驱动机构带动车体在水仓内移动。履带式机构有利于增大车体的抓地力,提高机器防滑能力。
S2.探测结构转动摄像头探测矿井水仓内淤泥的位置,并反馈至控制装置。
S3.控制装置向驱动机构发送指令,车体移动至淤泥的位置,铲斗机构工作。
S4.铲斗机构的掘泥铲斗在液压转向装置和液压杆的控制下搬动工作。
S5.掘泥铲斗工作铲除淤泥后收纳至淤泥输送机构的淤泥输送板处,铲斗机构的移动挡板打开,高压水枪工作。利用高压水枪可以充分稀释从铲斗倾倒出的淤泥,有效防止粘稠淤泥粘附于淤泥输送板上,从而提高机器人的整体工作效率。
S6.淤泥输送机构将泥水混合物输送至泥水分离装置,泥水分离装置的分离压板上下运动,分离淤泥和污水。
S7.分离后的淤泥经过运泥通道输送至存储机构的储泥箱中,污水经过水管进入储水箱。
S8.驱动机构带动车体驶离矿井水仓,矿井水仓智能清淤机器人将淤泥排出。
储泥箱内淤泥体积大于储泥箱总体积的80%后驱动机构带动车体驶离矿井水仓。车体内设置有温度计、湿度计和气压计,温度计、湿度计和气压计将监测信息传输至控制装置,控制装置控制车体内的气泵工作,维持车体内温度、湿度和气压的稳定。
另外,该智能清淤机器人采用泥水混合物泵吸的方式清理淤泥,从而清淤更加方便,高压水枪出水输送淤泥保证了清理效率和清理安全;利用淤泥输送机构分离淤泥和污水,通过挤压可以快速分离,超声波振动装置的设置也方便了粘性淤泥的分离;车体使用履带式行走机构,增强移动性能,摄像头和控制装置配合方便了控制。另外机器人在清理过程中利用气体循环保证了车体内的湿度和气压稳定,存储机构能够及时排渣,实现了自动化的智能清理。
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
- 一种矿井水仓智能清淤方法
- 一种矿井水仓智能清淤机器人