一种助推器电机调速器
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及助推器电机控制技术,尤其与一种助推器电机调速器有关。
背景技术
助推器是一种水面航行器,采用专用调速器、多相高频永磁电机和桨叶载荷作为其动力模块。采用高频永磁电机的助推器,其调速控制,影响着助推器的实际使用效果。随着助推器的应用领域不断拓展,对于一些特殊场所的应用,对其电机的调速功能、体积重量和续航时长具有较高的要求。助推器采用锂离子电池组供电,手柄通讯监控或者远程无线监控进行人机交互。专用调速器驱动多相高频永磁电机作为动力模块驱动桨叶推动助推器和载荷高速巡航。助推器要求具有高频永磁电机体积小、重量轻、高效节能、高功率因数等特点,助推器电机调速器采用无位置传感器控制算法,可实现多相高频永磁电机小电流平稳起动,高速稳速运行,且可实现调速功能。因此,在助推器结构和调速器硬件电路设计方面,需要解决整体体积需要小型化的问题。在调速器算法设计方面,需要解决调速准确性和时效性的问题,实现助推器电机可靠起动、稳速调速、高效可靠运行。目前缺少有效的应对此类助推器电机的调速方式,尤其针对是三相永磁电机,缺乏有效的调控手段。
发明内容
为解决上述相关现有技术不足,本发明提供一种助推器电机调速器,通过调速信号,结合检测的多项参数,输出六路PWM信号经驱动电路传输至三相逆变桥进行换相和调制,转换为三相UWV至三相高频永磁电机,实现对助推器电机有效控制,采用正弦波起动和方波运行相结合的双模驱动算法,可以实现助推器小电流平稳起动、高效率长时间续航。
为了实现本发明的目的,拟采用以下方案:
一种助推器电机调速器,包括:控制板,与控制板连接的DC/DC电路、三相逆变桥,以及与DC/DC电路、三相逆变桥连接的母线电容组;
母线电容组连接锂离子电池组,用于将锂离子电池组输出的电压U1转换后输出电压U2至DC/DC电路和三相逆变桥,并用于为三相逆变桥高频调制提供瞬时能量。
DC/DC电路用于将电压U2转换后输出隔离电源至控制板为控制板供电。
控制板包括控制电路、以及与控制电路连接的驱动电路、信号采集与调理电路:
其中,信号采集与调理电路用于采集1路母线电压信号、2路相电流信号、3路相反电动势过零信号,并提供给控制电路;
其中,控制电路连接上位机,用于根据1路母线电压信号、2路相电流信号、3路相反电动势过零信号,以及上位机提供的远程无线监控信号、手柄通讯监控信号、1路PWM占空比输入调速信号、1路模拟量输入调速信号,输出六路PWM信号至驱动电路;
其中,驱动电路,连接三相逆变桥,用于根据六路PWM信号输出六路PWM换相和调制信号至三相逆变桥。
1路母线电压信号和2相电流信号除用于正弦波和方波运行算法之外,用于欠压保护和过流保护,欠压时通过手柄指示灯提醒更换锂离子电池组,同时在停机状态时也可通过高频永磁电机绕组进行声音报警。控制板计算累积工作时长,采集母线电压信号、相电流信号后,存储在掉电非易失铁电存储器中,并可以通过串口读取,用于数据分析;控制板根据所采集母线电压信号、相电流信号运算基于电流闭环控制的空间矢量算法,输出正弦波驱动电流实现助推器小电流平稳起动。控制板根据ECAP接口捕获的方波信号,计算出准确的换相点,输出准确的六路PWM信号,实现高效高功率因数方波驱动,可以实现助推器高效率长时间续航。
三相逆变桥用于根据电压U2驱动助推器电机,并用于对六路PWM换相和调制信号进行换相和调制,输出三相UWV至助推器电机。
进一步,信号采集与调理电路包括:
1路母线电压信号检测电路,母线电压信号检测电路包括分压电阻和隔离运放,用于采集母线电压信号;
2路相电流信号检测电路,相电流信号检测电路包括霍尔电流传感器或锰铜分流电阻,用于采集相电流信号;相电流信号和母线电压信号用于闭环调速;
3路相反电动势过零信号检测电路,用于三相相反电动势过零信号。
进一步,3路相反电动势过零信号检测电路包括:
电阻分压网络单元,采用三相星型电阻网络,分别连接三相永磁电机的三相UVM,用于采用电阻分压的方式获取W相小幅值反电动势信号Zero_W,V相小幅值反电动势信号Zero_V,U相小幅值反电动势信号Zero_U,以及虚拟中性点VN;
3路比较单元,用于根据小幅值反电动势信号及虚拟中性点VN比较结果输出信号至隔离单元,1路比较单元连接虚拟中性点VN和W相小幅值反电动势信号Zero_W,1路比较单元连接虚拟中性点VN和U相小幅值反电动势信号Zero_U,1路比较单元连接虚拟中性点VN和V相小幅值反电动势信号Zero_V;
3路隔离单元,每1路隔离单元对应连接1路比较单元,用于进行信号输送方向的前后隔离;
3路整形单元,每1路整形单元对应连接1路隔离单元,整形单元采用施密特反相器,用于对隔离单元输送的信号进行整形,输出与助推器电机换相频率同频的边沿陡峭的方波,获得相反电动势过零信号。
进一步,比较单元包括电压比较器U2D、电阻R13、电阻R14、电阻R16、二极管D3、电阻R26、电容C30、电容C9、电容C10、电阻R32、电容C37,电压比较器U2D的正输入端P11通过电阻R13连接虚拟中性点VN,电压比较器U2D的负输入端P10通过电阻R14连接W相小幅值反电动势信号Zero_W、或U相小幅值反电动势信号Zero_U、或V相小幅值反电动势信号Zero_V,电压比较器U2D的正输入端P11连接电阻R16,电阻R16连接二极管D3正极,二极管D3负极连接电压比较器U2D的输出端P13,电压比较器U2D的输出端P13通过电阻R26连接+15V,电阻R26连接+15V的一端同时连接电容C30一端,电容C30另一端连接虚拟中性点VN,电压比较器U2D的正输入端P11通过电容C9连接虚拟中性点VN,电压比较器U2D的负输入端P10通过电容C10连接虚拟中性点VN,电阻R32一端连接电压比较器U2D的输出端P13,另一端连接隔离电路,电阻R32另一端同时连接电容C37一端,电容C37另一端连接虚拟中性点VN和隔离电路。
进一步,隔离单元包括双通道光电耦合器U7,双通道光电耦合器U7的引脚1连接电阻R32,引脚2、引脚3、引脚4连接虚拟中性点VN,引脚8通过一电阻R45连接+3.3V,引脚7通过一电阻R52连接+3.3V,引脚5连接DGND,并通过一电容C56连接引脚8,引脚7通过一电阻R56连接一电容C67一端,电容C67另一端连接DGND,电阻R56和电容C67连接处为隔离单元输出端。
进一步,控制电路包括DSP芯片,DSP芯片连接有晶振和存储器,DSP芯片的SCIB接口连接有RS485芯片,DSP芯片的SCIA接口连接有RS232芯片,RS232芯片和RS485芯片连接至上位机,上位机还连接DSP芯片的ECAP接口和AD接口,DSP芯片的ECAP接口和AD接口还连接信号采集与调理电路。
进一步,DSP芯片的PWM接口连接有6路隔离芯片,DSP芯片的GPIO接口连接有工作状态指示灯和受控电源,受控电源连接6路隔离芯片,DSP芯片用于通过GPIO驱动工作状态指示灯和受控电源,受控电源用于为隔离芯片侧供电,6路隔离芯片连接至驱动电路,用于对DSP芯片通过PWM接口输出的六路PWM信号进行隔离后输入到驱动电路。
进一步,DSP芯片的中断接口用于接收故障信号,故障信号包括过流、欠压等信号,DSP芯片用于根据故障信号对助推器电机调速器进行保护。
进一步,三相逆变桥采用多个N沟道增强型MOSFET管并联搭建,每一相逆变桥包括:
上桥臂,包括并联连接的MOSFET管Q13、MOSFET管Q14、MOSFET管Q15,MOSFET管Q13、MOSFET管Q14、MOSFET管Q15的源极共同连接母线电压正极VCC,MOSFET管Q13、MOSFET管Q14、MOSFET管Q15的栅极分别通过一个栅极电阻连接驱动电路以获取PWM栅极驱动信号,MOSFET管Q13、MOSFET管Q14、MOSFET管Q15的漏极共同连接助推器电机三相中对应一相;
下桥臂,包括并联连接的MOSFET管Q16、MOSFET管Q17、MOSFET管Q18,MOSFET管Q16、MOSFET管Q17、MOSFET管Q18的漏极共同通过相电流信号检测电路连接母线电压负极PGND,MOSFET管Q16、MOSFET管Q17、MOSFET管Q18的源极共同连接助推器电机三相中对应一相,MOSFET管Q16、MOSFET管Q17、MOSFET管Q18的栅极分别通过一个栅极电阻连接驱动电路,以获取PWM栅极驱动信号。
母线电容组包括多个并联的电解电容,隔离芯片采用ADuM3210,驱动电路采用驱动芯片UCC27201A,隔离运放采用AMC1311。
本发明的有益效果在于:
1、采用助推器电机调速器驱动多相高频永磁电机,可满足助推器体积小、重量轻的需求。采用正弦波起动和方波运行相结合的双模驱动算法,可以实现助推器小电流平稳起动、高效率长时间续航;
2、设计了一种3路相反电动势过零信号检测电路输出三路方波信号,适用于即调制又换相的三相逆变电路。电阻分压网络单元虚拟中性点与比较单元双轨电源悬浮地相连,有效提高了方波信号信噪比。比较单元采用滞环减小了方波信号边沿抖振,且滞环宽度可调节。隔离单元可以功率地和数字地高电压隔离,整形单元输出边沿陡峭的方波信号输送至数字信号处理进行边沿检测,不需要电平转换电路。该相反电动势过零信号检测电路可调为无位置传感器方波运行提供有效的换相信号;
3、助推器电机调速器驱动高频永磁电机绕组除进行调速稳速运行外,在上电自检阶段,可用于MOSFET损坏、电机绕组缺相、锂离子电池欠压声音报警。
附图说明
本文描述的附图只是为了说明所选实施例,而不是所有可能的实施方案,更不是意图限制本申请的范围。
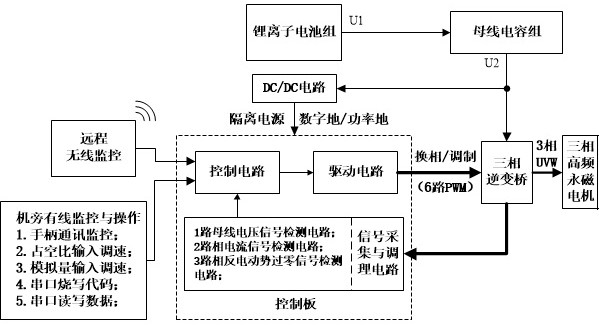
图1为本申请实施例的调速器整体电路结构示意图。
图2为本申请实施例的3路相反电动势过零信号检测电路整体结构图。
图3为本申请实施例的比较单元和隔离单元电路结构图。
图4为本申请实施例的控制电路结构图。
图5为本申请实施例的三相逆变桥其中任一相电路结构图。
图6为本申请实施例的工作流程示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面结合附图对本发明的实施方式进行详细说明,但本发明所描述的实施例是本发明一部分实施例,而不是全部的实施例。
本实例提供的一种助推器电机调速器,针对助推器的三相高频永磁电机,60V,额定转速8000r/min,工作区间7800r/min至8000r/min。
如图1所示,为本实例提供的一种助推器电机调速器,包括控制板,与控制板连接的DC/DC电路、三相逆变桥,以及与DC/DC电路、三相逆变桥连接的母线电容组。
母线电容组连接锂离子电池组,用于将锂离子电池组输出的电压U1转换后输出电压U2至DC/DC电路和三相逆变桥,并用于为三相逆变桥高频调制提供瞬时能量;DC/DC电路用于将电压U2转换后输出隔离电源至控制板为控制板供电。
本实例采用锂离子电池组供电,其输出直流电压为U1。当锂离子电池组充满电时,直流电压U1为58.8V。当锂离子电池组随着放电时长增加,其输出直流电压U1下降。助推器电机调速控制器正常工作需锂电池组输出直流电压U1最低为42V。锂离子电池组输出直流电压U1经过母线电容组得到直流电压U2为三相逆变桥供电。母线电容组采用多个电解电容并联构成,以提高电容值,为逆变桥高频调制提供瞬时能量。同时,直流电压U2输入至DC/DC电路,输出隔离电源送至控制板。
控制板包括控制电路、以及与控制电路连接的驱动电路、信号采集与调理电路;信号采集与调理电路用于采集1路母线电压信号、2路相电流信号、3路相反电动势过零信号,并提供给控制电路;控制电路连接上位机,用于根据1路母线电压信号、2路相电流信号、3路相反电动势过零信号,以及上位机提供的1路PWM占空比输入调速信号、1路模拟量输入调速信号,输出六路PWM信号至驱动电路;驱动电路连接三相逆变桥,用于根据六路PWM信号输出六路PWM换相和调制信号至三相逆变桥。
具体的,上位机提供手柄通讯监控、占空比输入调速、模拟量输入调速、串口烧写代码和串口读写数据等。
如图4所示,控制电路包括DSP芯片,DSP芯片连接有晶振和存储器。存储器采用铁电非易失存储器。晶振采用30MHz有源晶振倍频后提供150MHz工作频率。
DSP芯片的SCIB接口连接有RS485芯片,DSP芯片的SCIA接口连接有RS232芯片,RS232芯片和RS485芯片连接至上位机。上位机通过RS232芯片烧写程序和读取数据,通过RS485芯片进行机旁操作或远程操作,机旁操作可接操作手柄,交互锂离子电池组电压和助推器电机给定转频等信息,远程操作可通过转接4G物联网网络与手持设备进行信息交互。
上位机还连接DSP芯片的ECAP接口和AD接口,DSP芯片的ECAP接口和AD接口还连接信号采集与调理电路。一共4路ECAP接口,3路用于输入3路相反电动势过零信号,1路用于输入上位机提供的PWM占空比输入调速信号。其中PWM占空比调速信号频率为100Hz,峰峰值3.3V,占空比调节范围为0%至20%。AD接口进行模数转换,并用于助推器电机调速控制。
DSP芯片的PWM接口连接有6路隔离芯片,隔离芯片可以采用ADuM3210,DSP芯片的GPIO接口连接有工作状态指示灯和受控电源,受控电源连接6路隔离芯片,DSP芯片用于通过GPIO驱动工作状态指示灯和受控电源,受控电源用于为隔离芯片侧供电,6路隔离芯片连接至驱动电路,用于对DSP芯片通过PWM接口输出的六路PWM信号进行隔离后输入到驱动电路,驱动电路可以采用驱动芯片UCC27201A。
DSP芯片的中断接口用于接收故障信号,故障信号包括过流、欠压等信号,DSP芯片用于根据故障信号对助推器电机调速器进行保护。
经隔离后的六路PWM信号传输至驱动芯片UCC27201A输出六路换相和调制信号传送至三相逆变桥上下桥臂MOSFET的栅极和漏极。
作为具体实施方式之一,信号采集与调理电路包括:1路母线电压信号检测电路、2路相电流信号检测电路、3路相反电动势过零信号检测电路。
母线电压信号检测电路包括分压电阻和隔离运放,具体的本实例中隔离运放采用AMC1311,用于采集母线电压信号。
相电流信号检测电路用于采集相电流信号,包括霍尔电流传感器或锰铜分流电阻,具体的,本实例中,采用0.1mΩ、7W锰铜分流电阻,如图5所示,检测电阻R1和检测电阻R2并联,一端连接I_shunt,一端连接母线电压负极PGND。
相电流信号和母线电压信号用于闭环调速。
3路相反电动势过零信号检测电路用于三相相反电动势过零信号。
如图2~3所示,3路相反电动势过零信号检测电路包括电阻分压网络单元、3路比较单元、3路隔离单元、3路整形单元。
电阻分压网络单元采用三相星型电阻网络,分别连接三相永磁电机的三相UVM,用于采用电阻分压的方式获取W相小幅值反电动势信号Zero_W,V相小幅值反电动势信号Zero_V,U相小幅值反电动势信号Zero_U,以及虚拟中性点VN。
3路比较单元用于根据小幅值反电动势信号及虚拟中性点VN比较结果输出信号至隔离单元,1路比较单元连接虚拟中性点VN和W相小幅值反电动势信号Zero_W,1路比较单元连接虚拟中性点VN和U相小幅值反电动势信号Zero_U,1路比较单元连接虚拟中性点VN和V相小幅值反电动势信号Zero_V。
具体的,比较单元包括电压比较器U2D、电阻R13、电阻R14、电阻R16、二极管D3、电阻R26、电容C30、电容C9、电容C10、电阻R32、电容C37,电压比较器U2D的正输入端P11通过电阻R13连接虚拟中性点VN,电压比较器U2D的负输入端P10通过电阻R14连接W相小幅值反电动势信号Zero_W、或U相小幅值反电动势信号Zero_U、或V相小幅值反电动势信号Zero_V,电压比较器U2D的正输入端P11连接电阻R16,电阻R16连接二极管D3正极,二极管D3负极连接电压比较器U2D的输出端P13,电压比较器U2D的输出端P13通过电阻R26连接+15V,电阻R26连接+15V的一端同时连接电容C30一端,电容C30另一端连接虚拟中性点VN,电压比较器U2D的正输入端P11通过电容C9连接虚拟中性点VN,电压比较器U2D的负输入端P10通过电容C10连接虚拟中性点VN,电阻R32一端连接电压比较器U2D的输出端P13,另一端连接隔离电路,电阻R32另一端同时连接电容C37一端,电容C37另一端连接虚拟中性点VN和隔离电路。其中,小容值高频电容C9及电容C10,用于进行信号噪声消除;电阻R32、电容C37,用于形成低通滤波。
以W相为例,两路信号VN和Zero_W分别经输入电阻R13和电阻R14传输至电压比较器U2D的正输入端P11和负输入端P10,并接小容值高频电容C9和电容C10进行信号噪声消除。电压比较器U2D采用±12V双轨电源供电,其悬浮电源地与VN短接。电压比较器U2D正输入端P11与输出端P13通过由电阻R16和二极管D3所组成的滞环连接,通过调节R16阻值可调节滞环宽度。电压比较器U2D输出信号经由电阻R32和电容C37组成的低通滤波器后传输至隔离单元。
每1路隔离单元对应连接1路比较单元,用于进行信号输送方向的前后隔离。
具体的,如图3所示,隔离单元包括双通道光电耦合器U7,双通道光电耦合器U7的引脚1连接电阻R32,引脚2、引脚3、引脚4连接虚拟中性点VN,引脚8通过一电阻R45连接+3.3V,引脚7通过一电阻R52连接+3.3V,引脚5连接DGND,并通过一电容C56连接引脚8。引脚7通过一电阻R56连接一电容C67一端,电容C67另一端连接DGND,电阻R56和电容C67连接处为隔离电路输出端。其中,双通道光电耦合器U7可以采用A0630,CMR高于5kV/us,切换速率高达10Mb/s。
每1路整形单元对应连接1路隔离单元,整形单元采用施密特反相器74HC14,用于对隔离单元输送的信号进行整形,输出与助推器电机换相频率同频的边沿陡峭的方波,幅值为3.3V,获得相反电动势过零信号。
隔离单元输出信号ECAPW经由电阻R56和电容C67组成的低通滤波器后传输至整形单元,输出边沿陡峭的方波,方波频率与电机换相频率同频,幅值为3.3V。
另外两相U相和V相反电动势过零信号检测与W相相同,由此可获得3路相反电动势过零信号,并传输至DSP的ECAP端口,作为助推器电机方波运行换相信号。
三相逆变桥用于根据电压U2驱动助推器电机,并用于对六路PWM换相和调制信号进行换相和调制,输出三相UWV至助推器电机,进行起动、加速、高速稳速旋转、降速和停机操作控制。
具体,如图5所示,相逆变桥采用多个N沟道增强型MOSFET管并联搭建,MOSFET管的耐压80V,过流200A,100℃环境温度时开关频率不低于8kHz。
每一相逆变桥包括:上桥臂和下桥臂。
上桥臂包括并联连接的MOSFET管Q13、MOSFET管Q14、MOSFET管Q15,MOSFET管Q13、MOSFET管Q14、MOSFET管Q15的源极共同连接母线电压正极VCC,MOSFET管Q13、MOSFET管Q14、MOSFET管Q15的栅极分别通过一个栅极电阻连接驱动电路以获取PWM栅极驱动信号,MOSFET管Q13、MOSFET管Q14、MOSFET管Q15的漏极共同连接助推器电机三相中对应一相。下桥臂包括并联连接的MOSFET管Q16、MOSFET管Q17、MOSFET管Q18,MOSFET管Q16、MOSFET管Q17、MOSFET管Q18的漏极共同通过相电流信号检测电路连接母线电压负极PGND,MOSFET管Q16、MOSFET管Q17、MOSFET管Q18的源极共同连接助推器电机三相中对应一相,MOSFET管Q16、MOSFET管Q17、MOSFET管Q18的栅极分别通过一个栅极电阻连接驱动电路,以获取PWM栅极驱动信号。
具体的,如图5所示, 是以W相为例,上桥臂的MOSFET管Q13、MOSFET管Q14、MOSFET管Q15源极共同连接至母线电压正极VCC。W相上桥臂栅极驱动信号PWM_W_H经过栅极电阻R3、栅极电阻R6和栅极电阻R9分别传输至MOSFET管Q13、MOSFET管Q14、MOSFET管Q15的栅极,网络标号分别为PW_H1、PW_H2和PW_H3。同时,PWM_W_H通过泄放电阻R12连接至漏极,上桥臂MOSFET漏极与助推器电机的W相Phase_W相连。下桥臂的MOSFET管Q16、MOSFET管Q17、MOSFET管Q18源极共同连接至Phase_W。W相下桥臂栅极驱动信号PWM_W_L经过栅极电阻R15、栅极电阻R18和栅极电阻R21分别传输至MOSFET管Q16、MOSFET管Q17、MOSFET管Q18的栅极,网络标号分别为PW_L1、PW_L2和PW_L3。同时,PWM_W_L通过泄放电阻R24连接至漏极,下桥臂MOSFET漏极与相电流检测电路的I_shunt相连,最终通过相电流检测电阻R1和电阻R2连接至母线电压负极PGND。相电流检测电路采用锰铜分流电阻并联组成,检测信号通过单排针传输至控制电路。
工作方式的进一步详细说明:
锂离子电池组输出电压U1通过母线电容组滤波后获得直流电压U2,直流电压U2经DC/DC电路后获得调速控制器所需二次电源。同时,U2经母线电压检测,串联相电流检测电路后输入到换相和调制的三相逆变桥,驱动助推器电机工作。
助推器电机工作在工作过程中,1路母线电压信号、2路相电流信号送入DSP的AD转换接口进行模数转换作为控制反馈量,3路相反电动势过零信号送入DSP的ECAP捕获接口作为换相逻辑信号。助推器电机工作工作过程包括初始化、MOSFET自检、保护与运行。助推器电机调速器的控制流程,如图6所示:
初始化:DSP完成程序和数据存储空间分配,并将三相逆变桥驱动PWM信号配置为正弦波模式,且三相逆变桥处于禁用状态。助推器电机调速器完成初始化后,检测给定转速是否为零。转速给定检测程序检测手柄RS485通讯信号、占空比输入调速信号、模拟量输入调速信号等远程监控和机旁有线监控信号。转速给定信号以检测到的第一个非零信号作为给定转速,直至下一次开机重新检测。如果给定转速信号为零,则保持调速器处于停机状态。如果给定转速信号不为零,则进入MOSFET自检。
MOSFET自检:MOSFET自检通过周期地改变三相逆变桥驱动PWM信号,每周期内依次向UV相、VW相和WU相施加三组PWM驱动,使得三相高频永磁电机定子线圈周期性发出提醒声音。提醒周期设为5秒,PWM驱动信号频率为8kHz,PWM信号占空比10%。如果每周期内助推器电机发出不足三次声音提醒,表明MOSET不正常,需检查MOSFET进行故障排查。反之,则表明MOSFET就绪,可以运行三相高频永磁电机。
保护与运行:DSP通过AD端口实时监测相电流和母线电压。当相电流幅值不大于保护阈值200A时,该电流信号参与正弦波升速运行电流闭环运算,本实例采用电流闭环的VVVF算法;反之,助推器电机调速器进行停机操作,检查三相高频永磁电机负载、电气和机械连接等进行故障排查。当母线电压幅值不小于保护阈值42V时,该电流信号参与正弦波升速运行VVVF闭环运算;反之,DSP通过GPIO端口驱动指示灯报警母线电压欠压,提醒更换锂离子电池组。助推器电机调速器采用VVVF算法控制助推器电机正弦波升速运行,并同时捕获3路相反电动势过零信号作为方波运行模式换相信号。当DSP的ECAP端口捕获到3路过零信号后,3路信号依次相移120度电角度换相逻辑正确,则将DSP的PWM配置为方波模式。由于3路过零信号为方波信号,DSP采用ECAP端口根据方波信号边沿延迟时间计算换相周期,并进行换相周期实时进行换相补偿角度调整,进而计算出准确的换相点。DSP配置PWM模式时,暂时禁用三相逆变桥,助推器电机瞬间处于自由滑车状态。DSP配置完成方波模式后,采用三相逆变桥上下桥臂PWM-PWM调制方式驱动助推器电机稳速运行,转速误差不大于0.5%,最高转速为8000转/分钟,转频1.33kHz。过流保护和欠压保护同时在方波稳速运行时起保护作用。助推器电机方波运行中,接收转速给定信号,进行转速闭环控制实现稳速调速运行,调速范围6000转/分钟至8000转/分钟。当助推器电机调速器接收到停机信号时,助推器电机降速运行直至停机,停机响应时长小于1分钟。
通过无位置传感器正弦波起动和方波高速运行相结合的双模控制方法,使得助推器具有起动平稳、效率高、续航时间长等优势。同时,调速器具有上电自检功能,检测MOSFET和电机绕组是否缺相,并进行声音报警提示自检结果。调速器可记录累积工作时长、最近工作电流、电压数据,具有过流、欠压等保护功能。
以上所述仅为本发明的优选实施例,并不表示是唯一的或是限制本发明。本领域技术人员应理解,在不脱离本发明的范围情况下,对本发明进行的各种改变或同等替换,均属于本发明保护的范围。
- 一种助推器电机调速器
- 一种助推器电机安装结构