一种带视觉引导机器人上下料拆垛码垛自动化生产线
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及工件加工技术领域,具体领域为一种带视觉引导机器人上下料拆垛码垛自动化生产线。
背景技术
目前的工件加工,在进行配合关系时需要人工进行换料和上料,同时对于车床加工后的工件需要由人工放置到加工中心上进行二次加工,使得浪费了大量人力,同时车床或加工中心在完成工件加工后需要工人取下,并更换其他工件实现持续工件加工,但是现有的工件加工方式需要工人长时间位于加工设备旁边,使得提高了工人的劳动强度,同时加工效率低下。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种带视觉引导机器人上下料拆垛码垛自动化生产线。
为实现上述目的,本发明提供如下技术方案:一种带视觉引导机器人上下料拆垛码垛自动化生产线,包括左工作单元、右工作单元、清洗单元、移动单元、抓取单元和存放单元,所述左工作单元包括车床和加工中心,所述右工作单元与左工作单元结构相同,所述左工作单元的加工中心和右工作单元的加工中心并列设置在移动单元的同一侧,所述左工作单元的车床和右工作单元的车床分别位于移动单元的两侧,且左工作单元的车床和右工作单元的车床相对设置,所述清洗单元位于左工作单元的加工中心和右工作单元的加工中心之间设置,所述抓取单元安装在移动单元的移动端上,所述存放单元包括左存放模块、右存放模块和隔板存放台,所述左存放模块和右存放模块并列设置在移动单元的同一侧,且左存放模块和右存放模块分别朝向对应的左工作单元的加工中心和右工作单元的加工中心设置,所述隔板存放台设置于左存放模块和右存放模块之间,所述左存放模块包括上料工位、下料工位、上料托盘和下料托盘,所述上料工位和下料工位之间并列设置,所述上料托盘对应于上料工位处配合设置,所述下料托盘对应于下料工位处配合设置,所述右存放模块与左存放模块结构相同,所述隔板存放台包括暂存架和叠放在暂存架上的若干个隔板,隔板的大小面积与上料托盘和下料托盘的大小面积一致。
所述左存放模块靠近左工作单元的车床的一侧和右存放模块靠近右工作单元的车床的一侧处分别设置有抽检台。
优选的,所述清洗单元为清洗机。
优选的,所述清洗机为自动翻转式清洗机。
优选的,所述移动单元由钢架地轨和地轨跑车配合构成。
优选的,所述抓取单元为六轴关节机器人,六轴关节机器人的安装座设置在地轨跑车上。
优选的,所述六轴关节机器人的机械抓手上设置有视觉拍照相机和激光测距传感器。
优选的,所述六轴关节机器人的机械抓手上对应于视觉拍照相机处设置有透明保护罩。
与现有技术相比,本发明的有益效果是:通过移动机构与抓取机构的配合,并设置左工作单元和右工作单元,实现设备环绕,通过抓取机构能够对车床或加工中心进行工件上下料,极大的提高了设备的运行效率;
通过清洗单元的设置,能够对加工后的工件进行表面清洗,避免碎屑附着在工件表面,影响工件存放或二次加工;
通过抽检台的设置,能够方便工人进行存放的工件抽检;
通过存放单元的设置,能够方便将待加工的工件放置与上料工位处,并将加工完成的工件置于下料工位处,并通过隔板的设置,实现码垛操作,使得工件批量化生产中,避免了工人需要频繁上下料的情况。
附图说明
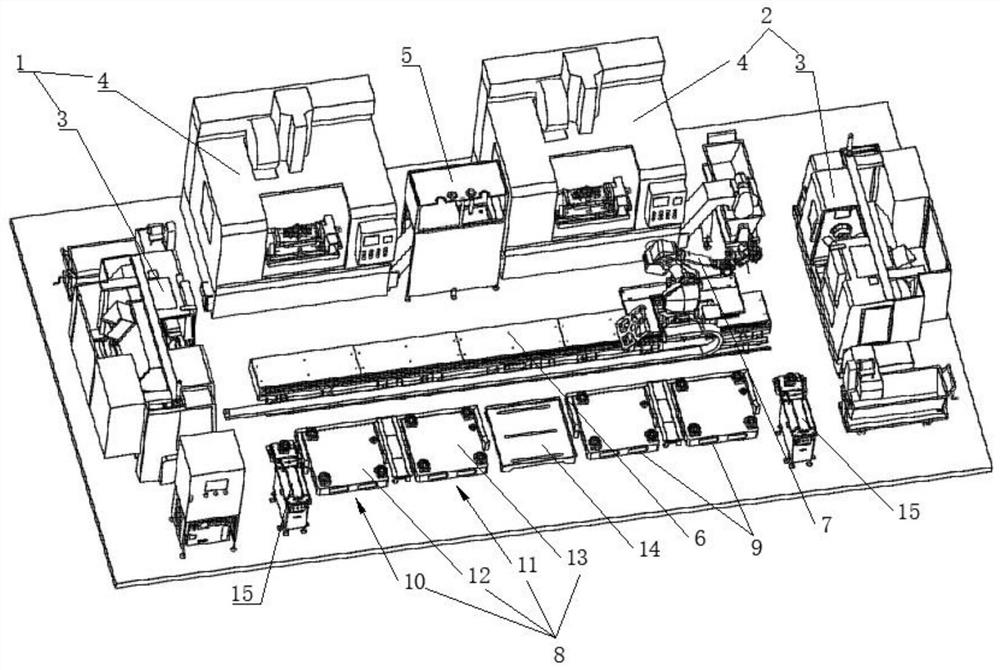
图1为本发明的结构示意图;
图2为本发明的俯视图。
图中:1、左工作单元;2、右工作单元;3、车床;4、加工中心;5、清洗单元;6、移动单元;7、抓取单元;8、左存放模块;9、右存放模块;10、上料工位;11、下料工位;12、上料托盘;13、下料托盘;14、隔板存放台;15、抽检台。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至2,本发明提供一种技术方案:一种带视觉引导机器人上下料拆垛码垛自动化生产线,包括左工作单元、右工作单元、清洗单元、移动单元、抓取单元和存放单元,所述左工作单元包括车床和加工中心,所述右工作单元与左工作单元结构相同,所述左工作单元的加工中心和右工作单元的加工中心并列设置在移动单元的同一侧,所述左工作单元的车床和右工作单元的车床分别位于移动单元的两侧,且左工作单元的车床和右工作单元的车床相对设置,所述清洗单元位于左工作单元的加工中心和右工作单元的加工中心之间设置,所述抓取单元安装在移动单元的移动端上,所述存放单元包括左存放模块、右存放模块和隔板存放台,所述左存放模块和右存放模块并列设置在移动单元的同一侧,且左存放模块和右存放模块分别朝向对应的左工作单元的加工中心和右工作单元的加工中心设置,所述隔板存放台设置于左存放模块和右存放模块之间,所述左存放模块包括上料工位、下料工位、上料托盘和下料托盘,所述上料工位和下料工位之间并列设置,所述上料托盘对应于上料工位处配合设置,所述下料托盘对应于下料工位处配合设置,所述右存放模块与左存放模块结构相同,所述隔板存放台包括暂存架和叠放在暂存架上的若干个隔板,隔板的大小面积与上料托盘和下料托盘的大小面积一致。
整线分为左单元和右单元(每单元工序都为车床至加工中心),左右单元可加工同一型号产品,也可加工不同型号产品(抓手共用,翻转清洗机共用)。
所述左存放模块靠近左工作单元的车床的一侧和右存放模块靠近右工作单元的车床的一侧处分别设置有抽检台。
所述清洗单元为清洗机。
所述清洗机为自动翻转式清洗机。
所述移动单元由钢架地轨和地轨跑车配合构成。
所述抓取单元为六轴关节机器人,六轴关节机器人的安装座设置在地轨跑车上。
所述六轴关节机器人的机械抓手上设置有视觉拍照相机和激光测距传感器,通过视觉拍照相机的设置,使得机器人抓手对应于工件处时,能够对工件进行视觉定位,方便机器人抓手对工件进行抓取和工件的形状识别,通过激光测距传感器的设置,使得机器人抓手对应于工件处时,能够对上下料工位处进行工件码垛高度测量。
所述六轴关节机器人的机械抓手上对应于视觉拍照相机处设置有透明保护罩,避免了机床油污和工件碎屑对相机造成破坏。
通过本技术方案,工作流程:
人工用叉车把码了三层工件的上料托盘上到上料工位处(每层工件之间会用隔板隔开);
带视觉相机的机器人抓手移动至上料托盘上方,先是用激光传感器来判断层高,再用视觉拍照来找出工件位置并抓取工件;
把抓取的工件放在抽检台上进行二次拍照后抓取(一是为了保证工件定位基面,二是为了识别工件角向位置);
然后机器人抓取工件到车床上下料安装;
在车床上的工件加工完成后机器人抓取完成的工件到翻转清洗机处进行工件表面清洗;
工件清洗完成后机器人抓取工件到加工中心上下料安装;
在完成工件加工后,机器人抓取成品工件到下料托盘上顺序放置;
按此循环,并将下料托盘上放满,并通过机器人抓手抓取暂存架上的隔板放在下料托盘每层料上,实现工件码垛。
另外上料托盘拆垛部分,以及每层料拆垛完,机器人抓手抓取隔板放在暂存架上进行存放。
抽检台上营造有背光效果使视觉拍照更加清晰,角向定位更加精准;
同时抽检台用于人工对成品进行抽检,实时把控产品生产合格状态。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种带视觉引导机器人上下料拆垛码垛自动化生产线
- 一种视觉引导拆垛码垛机器人装备