电动工具及其转速控制方法
文献发布时间:2023-06-19 12:08:44
[技术领域]
本发明涉及电动工具的技术领域,还涉及一种电动工具及其转速控制方法。
[背景技术]
曲线锯是一种往复运动工具,常用于切割木板等工件。出于切割习惯,曲线锯一般会设置低速和高速两种转速,在接近工件但尚未开始切割时一般采用低速状态,而开始切割后需要及时切换到高速以满足高效切割的需求。
现有技术中,曲线锯有设置高低速开关按钮的方案,用户自己根据情况适时地将开关由低速档调整到高速档,但此种方案有赖于用户依靠自身的经验和技巧进行判断,由此存在有判断失误的风险。曲线锯也有智能调节转速的方案,通过识别与工件的距离、识别负载电流或感测转速变化等方式来判断电动工具是否进入负载状态,从而进行转速的调节。然而,这些方案有时存在判断不准确的问题,往往是进入负载状态后才突然加速,容易导致电机堵转,从而造成烧机的后果。
鉴于此,确有必要提供一种改进的电动工具及其转速控制方法,以克服现有技术存在的缺陷。
[发明内容]
针对现有技术的不足,本发明的目的在于提供一种电动工具,能够以较准确的方式,在进入负载状态前提前实现低速到高速的切换,避免引起电机堵转的风险。
本发明解决现有技术问题所采用的技术方案是:一种电动工具,包括壳体、设置于所述壳体内的电机及由所述电机驱动的输出轴,所述输出轴连接一工作头以对一工件执行操作;其中,所述电动工具还包括与所述电机电性连接的控制单元以及传感组件,所述传感组件邻近所述工作头设置且用于采集所述工作头与所述工件的相对动态信息,并将所述相对动态信息传输给所述控制单元,所述控制单元根据所述相对动态信息判断所述工作头是否进入负载状态,从而控制所述电机以第一转速或第二转速驱动所述工作头,其中,所述第二转速高于所述第一转速。
作为进一步的优化方案,所述相对动态信息包括所述工作头与工件的距离信息,以及所述工作头是否沿工作方向持续前进的动态信息,所述控制单元包括电机控制电路和控制单元,所述传感组件将所述相对动态信息转换为电信号传输至所述控制单元,所述控制单元进行负载状态的判定,并将所述电信号转换为控制信号以向所述电机发送保持或切换转速的指令。
作为进一步的优化方案,所述传感组件为光敏传感组件,所述光敏传感组件包括光源发射器、光敏接收器及与所述光敏接收器连接的反馈电路,所述光源发射器发射光源,所述光敏接收器用于采集所述光源发射器所发射的光源的反射光线,所述反馈电路将所述反射光线转换为电信号并传输至所述控制单元。
作为进一步的优化方案,所述电动工具还包括设于所述壳体下方并与所述工作头的延伸方向垂直设置的底板,所述底板包括沿所述工作头的行进方向位于所述工作头前方的突出部,所述光源发射器和光敏接收器位于所述突出部,所述工作头与工件的距离信息与所述光敏接收器7与工件的距离信息正相关。
作为进一步的优化方案,所述电动工具还包括设于所述工作头附近的LED灯,所述LED灯具有空载照明和负载照明两种照明模式,所述控制单元根据所述相对动态信息控制所述LED灯的通断及照明模式。
本发明的另一目的在于提供一种电动工具的转速控制方法,能够以较准确的方式,在进入负载状态前提前实现低速到高速的切换,避免引起电机堵转的风险。
本发明为实现上述目的所采用的技术方案是:一种电动工具转速控制方法,其中,所述方法包括如下步骤:
启动后,电机以第一转速运行;
传感组件持续感应和识别工作头相对工件的相对动态信息,当所述传感组件检测到底板与工件有接触,并且底板相对工件持续向前移动时,则控制单元判断工作头进入负载状态,控制电机切换到第二转速,所述第二转速高于所述第一转速。
作为进一步的优化方案,所述电动工具以第二转速运行时,所述传感组件持续采集所述相对动态信息,所述控制单元根据所述相对动态信息选择维持第二转速,或切换到第一转速。
作为进一步的优化方案,所述电动工具以第二转速运行时,当所述传感组件识别到所述底板与所述工件没有接触,或有接触但没有相对运动时,所述控制单元控制所述电机保持第二转速运行预定的时间T1,超过预定的时间T1后,所述控制单元控制所述电机切换到第一转速。
作为进一步的优化方案,所述电动工具以第一转速运行一定的时间,在预定的时间T2内,所述传感组件识别到底板与所述工件没有接触,或有接触但没有相对运动时,则所述控制单元控制所述电机停机。
作为进一步的优化方案,所述电动工具初始以空载状态启动,当传感组件识别到底板与工件有接触,以空载照明模式开启LED灯,当识别到底板相对工件持续向前运动时,将LED切换到负载照明模式。
与现有技术相比,本发明具有如下有益效果:采用了本发明的电动工具,通过设置于工作头附近的传感组件感应和识别工作头相对工件的动态信息,并通过控制单元判断电动工具是否进入负载状态,在确定进入负载状态后控制电机切换转速,从而避免在已与负载接触后突然加速而导致电机堵转或待机时高速运转而额外损耗电力等的问题。
[附图说明]
下面结合附图对本发明的具体实施方式做进一步详细的说明:
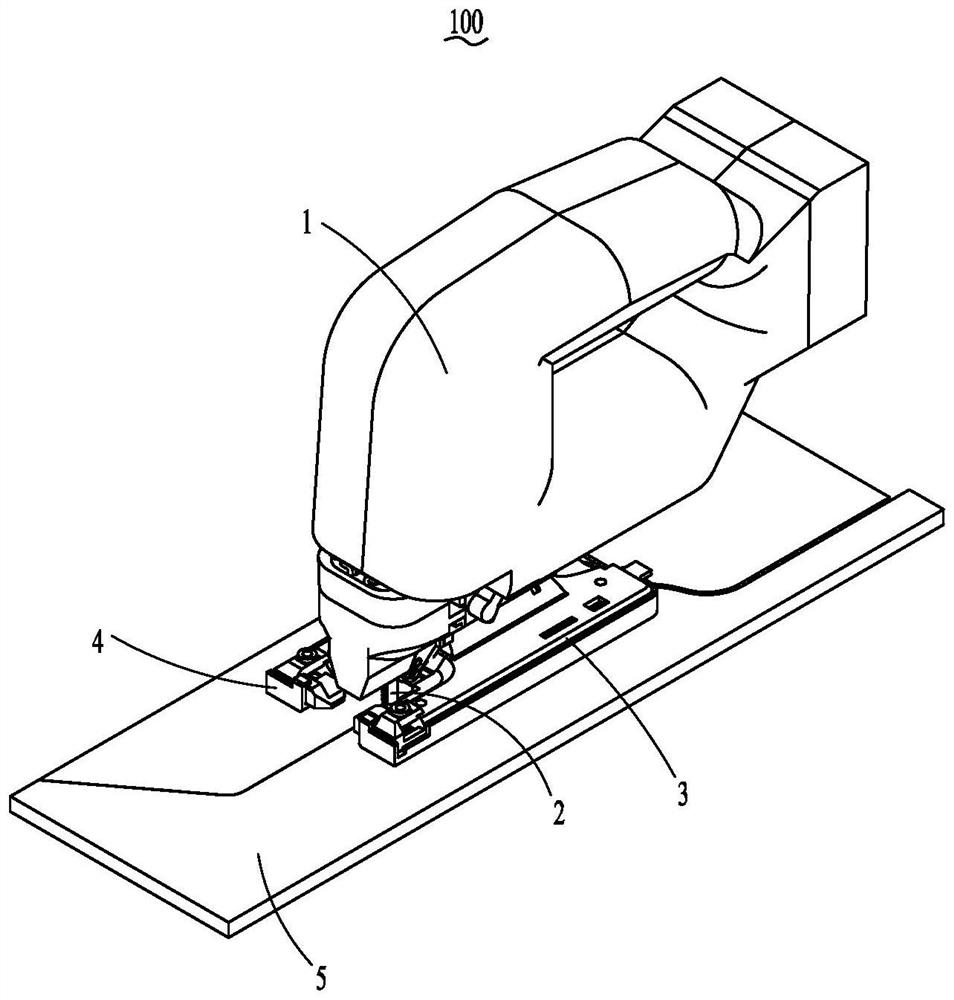
图1是本发明较佳实施例提供的电动工具的整体结构示意图;
图2是图1所示的电动工具在另一视角下的结构示意图;
图3是本发明较佳实施例提供的电动工具的转速控制方法的流程图。
图中附图标记的含义:
100、电动工具 1、壳体 2、工作头
3、底板 4、突出部 5、工件
6、光源发射器 7、光敏接收器
[具体实施方式]
在本发明中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。例如下述的“上”、“下”、“前”、“后”等指示方位或位置关系的词语仅基于附图所示的方位或位置关系,仅为了便于描述本发明和简化描述,而不是指示或暗示所指的装置/元件必须具有特定的方位或以特定的方位构造和操作,因此不能理解为对本发明的限制。
请参阅图1所示,为本发明优选实施例涉及的一种电动工具100,包括壳体1,壳体1内设有电机和被电机驱动的输出轴,输出轴连接一工作头2以对工件5执行操作;其中,电动工具100还包括与电机电性连接的控制单元和传感组件,传感组件邻近工作头2设置,用于采集工作头2与工件5的相对动态信息,并将相对动态信息传输给控制单元,控制单元根据相对动态信息判断工作头2的负载状态,从而控制电机以第一转速或第二转速驱动工作头2,其中,第二转速高于第一转速。
本申请以曲线锯100作为实施例以对技术方案进行说明,但该技术方案并不限于在曲线锯上使用,也可适用于往复锯、电圆锯、链锯以及电锤等其他的电动工具100。曲线锯100的工件5一般为木料板材。
通过设置于工作头2附近的传感组件感应工作头2和工件5的相对动态信息,从而判断电动工具100是否正进入负载状态,在必要时提前加速,避免在工作头2已与工件5接触后突然加速可能导致的电机堵转。
相对动态信息包括工作头2与工件5的距离信息,以及工作头2是否沿工作方向持续前进的动态信息,控制单元包括电机控制电路和控制器,传感组件将相对动态信息转换为电信号传输至控制器,控制器进行负载状态的判定,并将表征判定结果的电信号转换为控制信号发送给电机驱动电路,从而使电机以第一转速或第二转速驱动工作头2。
传感组件为光敏传感组件或压力传感组件。本实施例主要以光敏传感组件阐述本申请的发明宗旨。
如图2所示,光敏传感组件包括光源发射器6、光敏接收器7和与光敏接收器7连接的反馈电路,光源发射器6发射光源,光敏接收器77用于采集光源发射器6所发射的光源的反射光线,反馈电路将反射光线转换为电信号并传输给控制器。光源发射器6发出光线后,如没有遇到工件5,则光敏接收器7接收不到反射光线,如此控制单元判定电动工具100仍未接近工件5;反之,如工件5距离工作头2较近,光源发射器6发出的光线遇到工件5,则反射回的光线被光敏接收器7采集,从而将光线信息通过反馈电路反馈给控制单元。
如图2所示,电动工具100还包括设于壳体1下方并与工作头2的延伸方向垂直设置的底板3,底板3包括沿工作头2的行进方向位于工作头2前方的突出部4,光源发射器6和光敏接收器7均位于突出部4,工作头2与工件5的距离信息与光敏接收器7与工件5的距离信息正相关。
光源发射器6和光敏接收器7设于底板3的突出部4,由于突出部4位于工作头2的前方,因此突出部4能够相对工作头2更早地接触到工件5,也使位于突出部4的光敏接收器7能够及时接收来自工件5的反射光线,如此,光敏接收器7检测到工件5的瞬间即可视为工作头2与工件5的距离信息满足了预设的条件,而该预设条件是工作头与工件相对动态信息的其中之一。另外,相对动态信息的其中另一是工作头是否沿工作方向持续前进,该信息也是通过光敏传感组件检测得出的。在本实施方式中,突出部4与工作头2在沿工作头2的前进方向上有一定的距离S,该段距离S可作为工作头2是否沿工作方向持续前进的判定条件,比如,当电动工具100的底板3接触到工件5,且底板3沿工件5继续前移不大于S的距离,则可视为电动工具100满足了同时满足了两个条件,控制单元据此可以判断工作头2进入负载状态。
具体地,沿工作头2的行进方向,如果光敏接收器7识别到工件5,且工作头2沿工作方向持续行进一定距离,则控制器判定电动工具100进入负载状态。如此,满足进入负载状态需要满足至少两个条件:首先,光敏接收器7接收到由工件5反射的光线信息,表明突出部4已接触工件5;其次,工作头2向靠近工件5的方向持续运动一定的距离,表明操作者有明确的意图要使用电动工具100对工件5进行操作。
进一步地,沿工作头2的行进方向,工作头2与突出部4之间具有距离S,在电动工具100被判定进入负载状态前,工作头2沿工作方向持续行进的距离不大于距离S。换言之,当底板3的突出部4接触到工件5,并开始往前移动一定的距离,使得工作头2即将碰触到工件5或触碰到工件5的瞬间,控制单元判定电动工具100进入负载状态,从而控制电机执行相应的操作。
电动工具100还包括设于工作头2附近的LED灯,LED灯具有空载照明和负载照明两种照明模式,控制器根据相对动态信息控制LED灯的通断及照明模式。在本实施方式中,当传感组件识别到有工件5出现时,LED灯被点亮。当感应到工件5在工作头2近处,即开启照明灯,提示操作者电动工具100将要进入工作状态,相对于开机同时即打开照明灯的方案,如此设置比较节约能源,且可以有效避免机器空开时,强光对操作者带来直接伤害。
在本实施例中,LED灯有空载照明和负载照明两种工作模式,LED灯在空载模式下的亮度低于其在负载模式下的亮度;电动工具以第一转速运行时,LED灯以空载模式照明,电动工具以第二转速运行时,LED灯以负载模式照明。如此设置,有利于进一步节约能量,且在第二转速运行时,照明亮度高,保证光线充足,提供更清晰的切割区域。
参见图3,本发明还提供了一种用于电动工具的转速控制方法,其中,该方法包括:开机启动后,程序开始自检,电子设备(包括传感组件和控制单元)通电启动,电动工具进入空载模式,以第一转速运行;传感组件持续感应和识别工作头的状态,如未检测到工件,保持第一转速运行;当识别到工作头邻近工件并沿工作方向行进时,控制单元切换到第二转速,第二转速高于第一转速。
电动工具以第一转速运行时,当识别到工作头2与工件5邻近但没有持续沿工作方向行进,或工作头2持续向某一方向运动但未识别到工件5时,继续第一转速运行。
电动工具在空载状态下,传感组件持续感应和识别工作头的状态,如未检测到工件,继续以第一转速的空载状态运行,并计时,在预定的时间T2内,进入持续采样的循环,如超过预定的时间T2仍未检测到工件,则控制单元将控制电机停机。如检测到工件,则点亮LED灯,先以空载模式照明,与此同时,传感组件继续感应和识别工作头是否沿工作方向运动,如工作头没有沿工作方向运动,则继续保持第一转速的空载状态。
相反,当两个条件同时满足时,则电动工具进入负载模式,以高于第一转速的第二转速运行,与此同时,LED灯由空载模式进入负载模式,在负载模式下,LED灯比空载模式下的LED灯更亮。
电动工具以第二转速运行时,传感组件持续采集工作头2的动态信息,控制单元根据动态信息选择维持第二转速,或切换到第一转速。
电动工具以第二转速运行时,当传感组件识别到底板与工件没有接触,或有接触但没有相对运动时,控制器控制电机保持第二转速运行预定的时间T1,超过预定的时间T1后,控制器控制电机切换到第一转速。
值得注意的是,传感组件的采样周期为t
另外,电动工具以第一转速运行预定的时间,在预定的时间T2内,传感组件识别到底板与工件没有接触,或有接触但没有相对运动时,则控制器控制电机停机。
电动工具初始以空载状态启动,当传感组件识别到底板与工件有接触,以空载照明模式开启LED灯,当识别到底板相对工件持续向前运动时,将LED切换到负载照明模式。
综上,本发明提供了一种通过光敏传感组件来识别工作头2状态,根据工作头2的状态判定电动工具100是否进入负载状态从而控制电机输出转速的一套结构和方法。压力传感组件与光敏传感组件的工作原理类似,即压力传感组件能感知到工件5接近工作头2,并能感应到操作者带动电动工具100持续抵靠工件5时,即可判断工具正在或即将进入负载状态,从而及时切换输出转速,避免突然加速造成电机堵转。
本发明不局限于上述具体实施方式。本领域普通技术人员可以很容易地理解到,在不脱离本发明原理和范畴的前提下,本发明还有很多的替代方案。本发明的保护范围以权利要求书的内容为准。
- 电动工具转速控制方法及电动工具
- 电动工具及其转速控制方法