一种双电路全自动擦玻璃扫拖一体机器人
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及清洁机器人技术领域,尤其涉及一种双电路全自动擦玻璃扫拖一体机器人。
背景技术
擦玻璃机器人,是智能家用电器的一种。需带电工作的电器,以方形构造为主,方便清理玻璃的边角区域。擦玻璃机器人通过机身底部的真空吸盘或者风机在机身和玻璃之间产生真空部分,从而牢牢地吸附在玻璃上。随着国内生活水平的不断提高,原本一直在欧美市场销售的擦玻璃机器人也逐步的走入平常百姓家,并且逐步的被越来越多的人所接受,擦玻璃机器人将在不久的将来像白色家电一样成为每个家庭必不可少的清洁帮手。产品也会由初级智能向着更高程度的智能化程度发展,逐步的取代人工清洁。
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
虽然上述两种机器人都能够很好的为人们服务,然而,由于其各司其职,不能够很好的进行统一,导致消费者在购买时需要两种均购买,无疑增加了生活成本,同时人们在拖地和擦玻璃时大多都需手动洒水,尤其在擦拭玻璃时尤为明显,较为不便,且在清洁后仅靠绒布进行吸水洁净,虽然使用程度较佳,但是仍残留部分水份,在地面上容易导致滑倒,在玻璃上可能够出现冬季结冰。
因此,有必要提供一种新的双电路全自动擦玻璃扫拖一体机器人解决上述技术问题。
发明内容
本发明解决的技术问题是提供一种具有既能够擦玻璃也能够扫拖地、统一效果较好、缩减了消费者生活成本、同时能够在使用中进行自动喷水、且能够进行烘干清洁面的双电路全自动擦玻璃扫拖一体机器人。
为解决上述技术问题,本发明提供的双电路全自动擦玻璃扫拖一体机器人包括:机器人本体;控制器,所述控制器设置在所述机器人本体的顶部;槽口,所述槽口开设在所述机器人本体的底部;刮条,所述刮条设置在所述槽口的顶部内壁上;双吸盘,所述双吸盘设置在所述槽口的顶部内壁处并位于所述刮条内;两个履带式驱动轮,两个所述履带式驱动轮均设置在所述槽口的顶部内壁处并位于所述刮条内,两个所述履带式驱动轮分别位于所述双吸盘的两侧;万向轮,所述万向轮设置在所述槽口的顶部内壁处并位于所述刮条外,所述万向轮与两个所述履带式驱动轮呈三角阵列分布;吸尘口,所述吸尘口设置在所述机器人本体的底部并位于所述槽口的一侧;两个清扫刷,两个所述清扫刷均设置在所述机器人本体的底部,两个所述清扫刷分别位于所述吸尘口的两侧;多个魔术贴刺面层,多个所述魔术贴刺面层均固定安装在所述机器人本体的底部;绒布,所述绒布设置在所述机器人本体的底部;多个魔术贴毛面层,多个所述魔术贴毛面层均缝合在所述绒布上并和对应的所述魔术贴刺面层相粘合;喷水机构,所述喷水机构设置在所述机器人本体上;烘干机构,所述烘干机构设置在所述机器人本体上。
优选的,所述喷水机构包括布水管、多个雾化喷头、水箱、注水口、保护壳、水泵、吸水管和排水管,所述布水管固定安装在所述机器人本体的一侧,所述布水管位于两个所述清扫刷的上方,多个所述雾化喷头均匀固定安装在所述布水管远离所述机器人本体的一侧,所述水箱固定安装在所述机器人本体的一侧,所述注水口设置在所述水箱的顶部,所述保护壳固定安装在所述机器人本体位于所述水箱的一侧,所述保护壳位于所述水箱的一侧,所述水泵固定安装在所述保护壳内,所述吸水管设置在所述水泵的进水端上,所述吸水管的进水端与所述水箱相连通,所述排水管设置在所述水泵的排水端上,所述排水管的排水端与所述布水管相连通。
优选的,所述烘干机构包括布风管、多个出风罩、加热箱、进风箱、连通管和干燥管,所述布风管固定安装在所述机器人本体远离所述布水管的一侧,多个所述出风罩均固定安装在所述布风管的底部,所述加热箱固定安装在所述机器人本体远离所述水箱的一侧,所述进风箱固定安装在所述机器人本体位于所述加热箱的一侧,所述连通管设置在所述加热箱和所述进风箱相互靠近的一侧上,所述干燥管固定安装在所述加热箱远离所述进风箱的一侧上,所述干燥管的出风端与所述布风管相连通。
优选的,所述加热箱内设置有多个电热丝,所述进风箱的顶部设置有风扇。
优选的,所述机器人本体内置有充电电池、控制芯片和动力机构,所述槽口呈圆形,所述刮条呈多边形。
优选的,所述刮条的内圈上固定安装有四个连接片,四个所述连接片上均设置有第一螺栓,四个所述第一螺栓均与所述槽口的顶部内壁螺纹连接。
优选的,两个所述清扫刷均为三刷片,两个所述清扫刷上均设置有第二螺栓,两个所述第二螺栓分别与所述机器人本体内的电机输出轴相连接。
优选的,所述绒布上开设有弧形避让口,所述绒布的数量为1-2 片。
优选的,所述机器人本体的两侧均固定安装有两个固定片,四个所述固定片分别与所述布水管和所述布风管的两端固定连接。
与相关技术相比较,本发明提供的双电路全自动擦玻璃扫拖一体机器人具有如下有益效果:
本发明提供一种双电路全自动擦玻璃扫拖一体机器人:
1、本装置设置有两种供电方式,两种供电方式能够在拖地和擦玻璃时进行自由转换,其中设置的锂电池提供的直流电主要用于拖地,无线操作和无导线的方式较为灵活,导线外接的交流电主要用于擦玻璃,携带导线的方式较为安全,供电也更加稳定,通过控制器便于整体控制机器人本体,槽口内的刮条在清洁玻璃时进行刮除水渍,扫地时取下即可,双吸盘在擦玻璃时吸附在玻璃上,扫地时关闭,履带式驱动轮负责驱动力,万向轮负责转向,吸尘口将两个清扫刷清扫的垃圾进行吸附,多个魔术贴刺面层和魔术贴毛面层便于粘合绒布,绒布可选择单片和双片安装,单片主要用于扫地,双片主要用于擦玻璃;
2、通过喷水机构水泵将水箱内的清洁剂进行导入布水管,随后通过多个雾化喷头雾化喷出,便于清洁,无需人工手动喷水,较为省力均匀;
3、通过烘干机构能够在清洁后进行立即烘干,对于地面避免人们滑倒,对于玻璃避免冬季结冰,通过电热丝对导入加热箱内的风进行加热,风扇将风吸入,通过四个连接片和第一螺栓便于拆除刮条,通过第二螺栓便于拆除清扫刷,选择使用。
附图说明
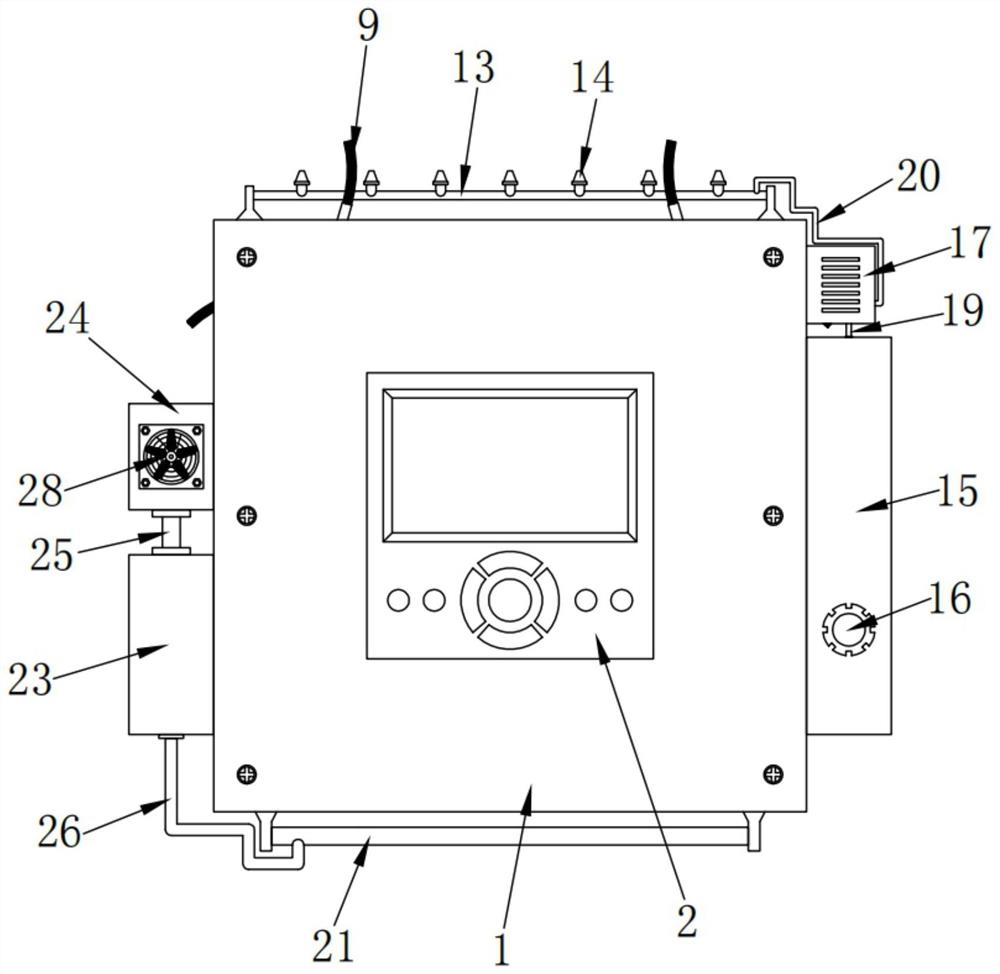
图1为本发明提供的双电路全自动擦玻璃扫拖一体机器人的一种较佳实施例的俯视结构示意图;
图2为本发明提供的双电路全自动擦玻璃扫拖一体机器人的一种较佳实施例的仰视结构示意图;
图3为图2中所示A部分的放大结构示意图;
图4为图2中所示B部分的放大结构示意图。
图中标号:1、机器人本体;2、控制器;3、槽口;4、刮条;5、双吸盘;6、履带式驱动轮;7、万向轮;8、吸尘口;9、清扫刷;10、魔术贴刺面层;11、绒布;12、魔术贴毛面层;13、布水管;14、雾化喷头;15、水箱;16、注水口;17、保护壳;18、水泵;19、吸水管;20、排水管;21、布风管;22、出风罩;23、加热箱;24、进风箱;25、连通管;26、干燥管;27、电热丝;28、风扇。
具体实施方式
下面结合附图和实施方式对本发明作进一步说明。
请结合参阅图1-图4,其中,图1为本发明提供的双电路全自动擦玻璃扫拖一体机器人的一种较佳实施例的俯视结构示意图;图 2为本发明提供的双电路全自动擦玻璃扫拖一体机器人的一种较佳实施例的仰视结构示意图;图3为图2中所示A部分的放大结构示意图;图4为图2中所示B部分的放大结构示意图。双电路全自动擦玻璃扫拖一体机器人包括:机器人本体1;控制器2,所述控制器2 设置在所述机器人本体1的顶部;槽口3,所述槽口3开设在所述机器人本体1的底部;刮条4,所述刮条4设置在所述槽口3的顶部内壁上;双吸盘5,所述双吸盘5设置在所述槽口3的顶部内壁处并位于所述刮条4内;两个履带式驱动轮6,两个所述履带式驱动轮6均设置在所述槽口3的顶部内壁处并位于所述刮条4内,两个所述履带式驱动轮6分别位于所述双吸盘5的两侧;万向轮7,所述万向轮7 设置在所述槽口3的顶部内壁处并位于所述刮条4外,所述万向轮7 与两个所述履带式驱动轮6呈三角阵列分布;吸尘口8,所述吸尘口 8设置在所述机器人本体1的底部并位于所述槽口3的一侧;两个清扫刷9,两个所述清扫刷9均设置在所述机器人本体1的底部,两个所述清扫刷9分别位于所述吸尘口8的两侧;多个魔术贴刺面层10,多个所述魔术贴刺面层10均固定安装在所述机器人本体1的底部;绒布11,所述绒布11设置在所述机器人本体1的底部;多个魔术贴毛面层12,多个所述魔术贴毛面层12均缝合在所述绒布11上并和对应的所述魔术贴刺面层10相粘合;喷水机构,所述喷水机构设置在所述机器人本体1上;烘干机构,所述烘干机构设置在所述机器人本体1上,通过控制器2便于整体控制机器人本体1,槽口3内的刮条4在清洁玻璃时进行刮除水渍,扫地时取下即可,双吸盘5在擦玻璃时吸附在玻璃上,扫地时关闭,履带式驱动轮6负责驱动力,万向轮7负责转向,吸尘口8将两个清扫刷9清扫的垃圾进行吸附,多个魔术贴刺面层10和魔术贴毛面层12便于粘合绒布11,绒布11可选择单片和双片安装,单片主要用于扫地,双片主要用于擦玻璃。
所述喷水机构包括布水管13、多个雾化喷头14、水箱15、注水口16、保护壳17、水泵18、吸水管19和排水管20,所述布水管13 固定安装在所述机器人本体1的一侧,所述布水管13位于两个所述清扫刷9的上方,多个所述雾化喷头14均匀固定安装在所述布水管 13远离所述机器人本体1的一侧,所述水箱15固定安装在所述机器人本体1的一侧,所述注水口16设置在所述水箱15的顶部,所述保护壳17固定安装在所述机器人本体1位于所述水箱15的一侧,所述保护壳17位于所述水箱15的一侧,所述水泵18固定安装在所述保护壳17内,所述吸水管19设置在所述水泵18的进水端上,所述吸水管19的进水端与所述水箱15相连通,所述排水管20设置在所述水泵18的排水端上,所述排水管20的排水端与所述布水管13相连通,通过喷水机构水泵18将水箱15内的清洁剂进行导入布水管13,随后通过多个雾化喷头14雾化喷出,便于清洁,无需人工手动喷水,较为省力均匀。
所述烘干机构包括布风管21、多个出风罩22、加热箱23、进风箱24、连通管25和干燥管26,所述布风管21固定安装在所述机器人本体1远离所述布水管13的一侧,多个所述出风罩22均固定安装在所述布风管21的底部,所述加热箱23固定安装在所述机器人本体 1远离所述水箱15的一侧,所述进风箱24固定安装在所述机器人本体1位于所述加热箱23的一侧,所述连通管25设置在所述加热箱 23和所述进风箱24相互靠近的一侧上,所述干燥管26固定安装在所述加热箱23远离所述进风箱24的一侧上,所述干燥管26的出风端与所述布风管21相连通,通过烘干机构能够在清洁后进行立即烘干,对于地面避免人们滑倒,对于玻璃避免冬季结冰。
所述加热箱23内设置有多个电热丝27,所述进风箱24的顶部设置有风扇28,通过电热丝27对导入加热箱23内的风进行加热,风扇28将风吸入。
所述机器人本体1内置有充电电池、控制芯片和动力机构,所述槽口3呈圆形,所述刮条4呈多边形。
所述刮条4的内圈上固定安装有四个连接片,四个所述连接片上均设置有第一螺栓,四个所述第一螺栓均与所述槽口3的顶部内壁螺纹连接,通过四个连接片和第一螺栓便于拆除刮条4。
两个所述清扫刷9均为三刷片,两个所述清扫刷9上均设置有第二螺栓,两个所述第二螺栓分别与所述机器人本体1内的电机输出轴相连接,通过第二螺栓便于拆除清扫刷9,选择使用。
所述绒布11上开设有弧形避让口,所述绒布11的数量为1-2片。
所述机器人本体1的两侧均固定安装有两个固定片,四个所述固定片分别与所述布水管13和所述布风管21的两端固定连接。
本发明提供的双电路全自动擦玻璃扫拖一体机器人的工作原理如下:
本装置内置有锂电池用于提供直流电,同时本装置还设置有外接交流电导线,其中锂电池提供的直流电主要用于拖地使用,本装置可进行无线操作,即:锂电池不对双吸盘5进行供电;导线提供的交流电主要用于擦玻璃使用,即:导线不对清扫刷9处的电机和吸尘口8 进行供电,其余装置则通用两种电;
在拖地时参照图2,绒布11安装一片,且此片绒布11位于布风管21的一侧,本装置布水管13一侧为前侧,布风管21的一侧为后侧,同时通过第一螺栓取下刮条4,确认完毕后在水箱15内通过注水口16进行注入清洁剂;
随后通过控制器2启动本装置,本装置采用充电电池供电,无需理线,本装置启动时设置拖地指令,此时双吸盘5处于关闭状态,万向轮7负责本装置转向,两个履带式驱动轮6负责提供移动驱动力;
在本装置运行时,一次清洁时:无需启动水泵18,此时只启动清扫刷9和吸尘口8,无需进行安装绒布11也可(可选择),设备运动时两个转动的清扫刷9首先进行吸尘处理,将垃圾通过吸尘口8 进行吸入;
二次清洁时,取下清扫刷9和关闭吸尘口8并安装绒布11,随后水泵18、风扇28和电热丝27启动,水泵18通过吸水管19将水箱15内的清洁剂抽出,由排水管20排入至布水管13内,之后通过雾化喷头14喷出雾化,此时对地面进行轻微润湿,随后通过的绒布 11进行吸干,然后风扇28将外部风吸入至进风箱24内,之后通过连通管25导入至加热箱23内,随后通过电热丝27加热的热风由干燥管26导入至布风管21内通过多个出风罩22排出对地面进行烘干;
擦玻璃时,将两个清扫刷9取下并安装两片绒布11,随后将刮条4进行安装,当本装置启动时双吸盘5能够吸附在玻璃上,履带式驱动轮6进行驱动本装置移动,同理布水管13进行喷出清洁剂,刮条4刮除部分水渍,随后绒布11进行吸附,最后通过布风管21喷出的热风进行烘干即可。
与相关技术相比较,本发明提供的双电路全自动擦玻璃扫拖一体机器人具有如下有益效果:
本发明提供一种双电路全自动擦玻璃扫拖一体机器人,本装置设置有两种供电方式,两种供电方式能够在拖地和擦玻璃时进行自由转换,其中设置的锂电池提供的直流电主要用于拖地,无线操作和无导线的方式较为灵活,导线外接的交流电主要用于擦玻璃,携带导线的方式较为安全,供电也更加稳定,通过控制器2便于整体控制机器人本体1,槽口3内的刮条4在清洁玻璃时进行刮除水渍,扫地时取下即可,双吸盘5在擦玻璃时吸附在玻璃上,扫地时关闭,履带式驱动轮6负责驱动力,万向轮7负责转向,吸尘口8将两个清扫刷9 清扫的垃圾进行吸附,多个魔术贴刺面层10和魔术贴毛面层12便于粘合绒布11,绒布11可选择单片和双片安装,单片主要用于扫地,双片主要用于擦玻璃,通过喷水机构水泵18将水箱15内的清洁剂进行导入布水管13,随后通过多个雾化喷头14雾化喷出,便于清洁,无需人工手动喷水,较为省力均匀,通过烘干机构能够在清洁后进行立即烘干,对于地面避免人们滑倒,对于玻璃避免冬季结冰,通过电热丝27对导入加热箱23内的风进行加热,风扇28将风吸入,通过四个连接片和第一螺栓便于拆除刮条4,通过第二螺栓便于拆除清扫刷9,选择使用。
需要说明的是,本发明的设备结构和附图主要对本发明的原理进行描述,在该设计原理的技术上,装置的动力机构、供电系统及控制系统等的设置并没有完全描述清楚,而在本领域技术人员理解上述发明的原理的前提下,可清楚获知其动力机构、供电系统及控制系统的具体。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种双电路全自动擦玻璃扫拖一体机器人
- 一种双电路全自动擦玻璃扫拖一体机器人