一种基于物联网的小型多功能农业机器人
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及物联网农业用具技术领域,尤其涉及一种基于物联网的小型多功能农业机器人。
背景技术
传统农业生产活动中的浇水灌溉、施肥、打药,农民依靠人工估摸,全凭经验和感觉来完成,而应用物联网,诸如瓜果蔬菜的浇水时间,施肥、打药,怎样保持精确的浓度,如何实行按需供给等一系列作物在不同生长周期曾被模糊处理的问题,都有信息化智能监控系统实时定量精确把关;
我国农业正朝着高机械化、智能化快速发展,由于目前市面上很多农业设备价格昂贵、体积较大,不利于个体农户购买使用,而且我国地域广袤,地区农业发展自然条件差异化明显,山地、丘陵、山坡、微小型盆地等地区无法广泛普及适用于平原耕作的大型农业机械,再加上农业机械市场本身对机械智能化、集成化需求进一步提升,因此,本发明提出一种基于物联网的小型多功能农业机器人以解决现有技术中存在的问题。
发明内容
针对上述问题,本发明的目的在于提出一种基于物联网的小型多功能农业机器人,该基于物联网的小型多功能农业机器人解决了目前市面上很多农业设备价格昂贵、体积较大,不利于个体农户购买使用,而且我国地域广袤,地区农业发展自然条件差异化明显,山地、丘陵、山坡、微小型盆地等地区无法广泛普及适用于平原耕作的大型农业机械,再加上农业机械市场本身对机械智能化、集成化需求进一步提升的问题。
为实现本发明的目的,本发明通过以下技术方案实现:一种基于物联网的小型多功能农业机器人,包括以下步骤:
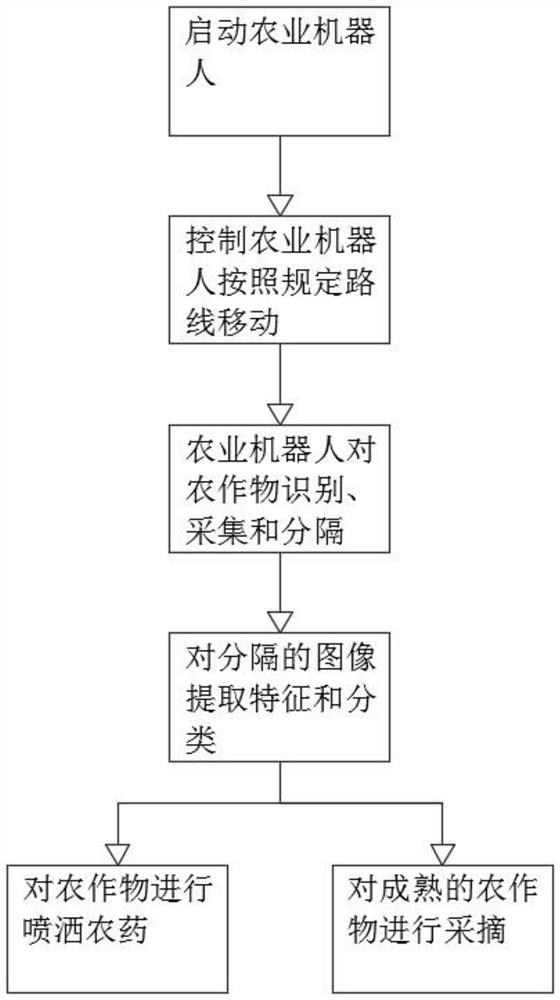
步骤一:在使用的时候首先通过TFT电容触摸屏启动农业机器人,其次通过树莓派的控制系统进行发送移动的控制命令至STM32辅助控制系统,当STM32辅助控制系统接收到控制命令后进行驱动农业机器人的进行移动;
步骤二:其次农业机器人根据设定好的路线程序进行自动在规定的路线进行移动;
步骤三:农业机器人在规定的路线进行移动的同时通过摄像头对路线中的农作物进行进行识别,当识别到农作物后农业机器人停止运动,然后农业机器人对农作物进行图像采集,再将图像进行识别,最后对图像进行分隔;
步骤四:农业机器人在图像分隔完成后对进行提取特征,在提取特征后对特征进行分类,并通过分类后的数据用于植物叶片的识别,在农业机器人图像采集完成后继续在规定的路线进行运动;
步骤五:当农业机器人沿着规定的路线识别到喷洒农药区域的农作物时,然后停止运动,同时进行获取当天的天气数据,然后智能根据天气数据将农药调控至规定的浓度,最后对农作物进行喷洒,当喷洒完成后继续按照规定的路线进行运动;
步骤六:在农业机器人沿着规定的路线进行移动的过程,农业机器人通过摄像头采集图像,当识别到成熟的果实时,然后农业机器人通过机械臂对果实采摘,并且当农业机器人识别到未识别到成熟果实和未发现果实,农业机器人就会按照规定路线继续移动。
进一步改进在于:在所述步骤一种,STM32辅助控制系统接收到控制命令时,通过控制电机驱动板进行驱动电机进行控制农业机器人的运动,同时获取和处理电感运放板得到的数据使小车按照规定的路线行驶。
进一步改进在于:在所述步骤二中,农业机器人通过电磁导航和PID控制沿着规定的路线进行运动,所述电磁导航是在规定的路径进行铺设的通电导线周围产生磁场,其次工字电感在这个交变磁场中会产生感应电动势,农业机器人通过对感应电动势进行选频、放大、检波,然后得到稳定信号并输入到树莓派主控系统对路径信息进行识别与处理,保障机器人巡着导线运行。
进一步改进在于:在所述步骤三中对农作物的图像识别主要通过计算机视觉技术进行识别,图像分割是将摄像头采集到的整个图像区域进行分隔成特定的互不交叠的非空子区域,主要对植物的彩色图像进行分隔,并且花朵、叶片在颜色上明显突出,所以采用基于颜色的自动阈值分割法。
进一步改进在于:所述自动阈值分割法首先将图像从RGB颜色空间转换到Lab颜色空间,其次根据图像中的中研究对象的颜色提取对应的L、a、b分量,然后通过OTSU进行自动阈值法进行分割,最后通过数学形态学操作去除噪声,得到二值图。
进一步改进在于:在所述步骤四中,对分隔完成后的图像进行提取颜色、形状和纹理三种特征,颜色特征中对色相H和饱和度S进行提取特征。
进一步改进在于:在所述步骤四中,将提取特征后的图像后,再将每种花朵和叶片的三类特征作为SVM的训练特征,然后得到SVM分类器,在SVM分类器得到叶片的颜色、形状和纹理特征的向量后,将叶片的颜色、形状和纹理特征作为分类方法的输入向量,用于植物叶片的识别。
进一步改进在于:在所述步骤五中农业机器人通过ESP32模块实现物联网功能,并且通过树莓派发送命令,当STM32接收到树莓派的命令时,通过电机驱动板控制水泵进行喷洒农药。
进一步改进在于:在所述步骤六中,通过树莓派发送命令,当STM32接收到树莓派的命令时,控制机械臂完成采摘作业。
本发明的有益效果为:本发明植入整套功能程序的农用机器人可以更为系统、全面、综合地感知农作物的生长情况,并可以根据所收集的数据资料结合地区农业气候、气象等资源条件自动进行相应的作业,提高农业生产的智慧化、精准化水平;利用自动化设备代替人工,充分利用图像处理技术来达到精耕细作的目的。采用计算机视觉技术对农作物植株进行标记分类,替代人工筛选方式,减少工作量,提高了耕作的效率;提供简洁的GUI界面,且自动化程度高。降低了操作机器人的难度,使得大多数本产品使用者都可以较为轻松的使用;同时在视觉处理部分,加入高斯滤波、BM3D去噪等降噪算法使得图像的纯净度得到提升,减轻了后续图像特征提起的难度,使得图像识别精度得到提升;在运动方面采用闭环控制系统,运用经典PID算法使得机器人对于复杂地形有着更好的通过能力,大大提高机器人的实用性;采用模块化设计的思路,各部分功能分开,各个功能模块之间互不干扰,需要相应功能时只需进行对应模块组装即可。尽可能缩小机器的体积,提高了机器的灵活性,也降低了维护和管理的难度。
附图说明
图1为本发明的使用流程示意图。
图2为本发明的硬件模块连接框图。
图3为本发明的基于颜色的自动阈值分割法图。
具体实施方式
为了加深对本发明的理解,下面将结合实施例对本发明做进一步详述,本实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
实施例一
根据图1-图3所示,本实施例提供了一种基于物联网的小型多功能农业机器人,包括以下步骤:
步骤一:在使用的时候首先通过TFT电容触摸屏启动农业机器人,其次通过树莓派的控制系统进行发送移动的控制命令至STM32辅助控制系统,当STM32辅助控制系统接收到控制命令后进行驱动农业机器人的进行移动;
步骤二:其次农业机器人根据设定好的路线程序进行自动在规定的路线进行移动;
步骤三:农业机器人在规定的路线进行移动的同时通过摄像头对路线中的农作物进行进行识别,当识别到农作物后农业机器人停止运动,然后农业机器人对农作物进行图像采集,再将图像进行识别,最后对图像进行分隔;
步骤四:农业机器人在图像分隔完成后对进行提取特征,在提取特征后对特征进行分类,并通过分类后的数据用于植物叶片的识别,在农业机器人图像采集完成后继续在规定的路线进行运动;
步骤五:当农业机器人沿着规定的路线识别到喷洒农药区域的农作物时,然后停止运动,同时进行获取当天的天气数据,然后智能根据天气数据将农药调控至规定的浓度,最后对农作物进行喷洒,当喷洒完成后继续按照规定的路线进行运动;
步骤六:在农业机器人沿着规定的路线进行移动的过程,农业机器人通过摄像头采集图像,当识别到成熟的果实时,然后农业机器人通过机械臂对果实采摘,并且当农业机器人识别到未识别到成熟果实和未发现果实,农业机器人就会按照规定路线继续移动。
在所述步骤一中,STM32辅助控制系统接收到控制命令时,通过控制电机驱动板进行驱动电机进行控制农业机器人的运动,同时获取和处理电感运放板得到的数据使小车按照规定的路线行驶。
在所述步骤二中,农业机器人通过电磁导航和PID控制沿着规定的路线进行运动,所述电磁导航是在规定的路径进行铺设的通电导线周围产生磁场,其次工字电感在这个交变磁场中会产生感应电动势,农业机器人通过对感应电动势进行选频、放大、检波,然后得到稳定信号并输入到树莓派主控系统对路径信息进行识别与处理,保障机器人巡着导线运行。
在所述步骤三中对农作物的图像识别主要通过计算机视觉技术进行识别,图像分割是将摄像头采集到的整个图像区域进行分隔成特定的互不交叠的非空子区域,主要对植物的彩色图像进行分隔,并且花朵、叶片在颜色上明显突出,所以采用基于颜色的自动阈值分割法。
所述自动阈值分割法首先将图像从RGB颜色空间转换到Lab颜色空间,其次根据图像中的中研究对象的颜色提取对应的L、a、b分量,然后通过OTSU进行自动阈值法进行分割,最后通过数学形态学操作去除噪声,得到二值图。
在所述步骤四中,对分隔完成后的图像进行提取颜色、形状和纹理三种特征,颜色特征中对色相H和饱和度S进行提取特征。
在所述步骤四中,将提取特征后的图像后,再将每种花朵和叶片的三类特征作为SVM的训练特征,然后得到SVM分类器,在SVM分类器得到叶片的颜色、形状和纹理特征的向量后,将叶片的颜色、形状和纹理特征作为分类方法的输入向量,用于植物叶片的识别。
在所述步骤五中农业机器人通过ESP32模块实现物联网功能,并且通过树莓派发送命令,当STM32接收到树莓派的命令时,通过电机驱动板控制水泵进行喷洒农药。
在所述步骤六中,通过树莓派发送命令,当STM32接收到树莓派的命令时,控制机械臂完成采摘作业。
使用时,该机器人可根据用户设定的程序在相应的时间自动完成相应的功能,机器人通过电磁导航以及PID控制沿着设定好的路线运动,同时通过摄像头采集图像进行农作物的识别,识别到农作物后,机器人停止运动,当进行农药喷洒作业时,实时采集温湿度数据并通过物联网获取当天的天气数据,智能调控农药的浓度然后对农作物喷洒农药,喷洒完成后继续运动,直至识别到下一株农作物,进行果实采摘作业时,机器人通过摄像头采集图像进行成熟果实的识别,如果成功识别到成熟果实,机器人会通过机械臂完成果实采摘作业,如果未识别到成熟果实或已经完成全部果实的采摘,机器人将继续运动,直至识别到下一株农作物,这样一种基于物联网的小型多功能农业机器人就使用完成了。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种基于物联网的小型多功能农业机器人
- 一种小型化的物联网水质浊度多功能检测器