基于人工智能的汽车模型视觉检测方法
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及汽车模型视觉检测技术领域,具体涉及基于人工智能的汽车模型视觉检测方法。
背景技术
汽车模型,是完全依照真车的形状、结构、色彩,甚至内饰部件,严格按比例缩小而制作的比例模型,好的汽车模型具有较高的观赏价值和装饰作用,而评定一个汽车模型的好坏最直观的就是看起车身漆面是否受损;
传统的对汽车模型的漆面受损进行检测是通过人工检测的方式,这样的检测方式效率不高,且因为汽车模型本身的体积较小,一些微小的漆面缺陷无法准确地检测出;而现有的汽车模型的监测大部分是对其结构进行监测,没有去针对汽车模型的漆面缺损进行专门的检测;
为了解决上述问题,本发明提出了一种解决方案。
发明内容
本发明的目的在于提供基于人工智能的汽车模型视觉检测方法,目的是为了解决现有技术中没有去针对汽车模型的漆面缺损进行专门检测,无法准确地检测汽车模型的微小缺陷,且检测效率不高等问题。
本发明的目的可以通过以下技术方案实现:
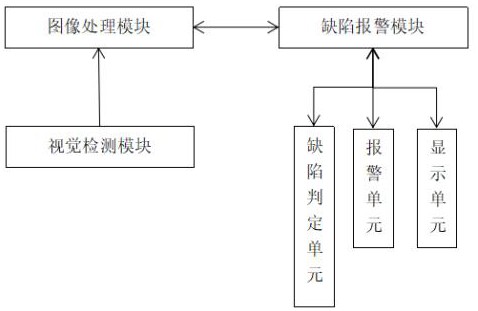
基于人工智能的汽车模型视觉检测方法,包括:
步骤一:视觉检测模块对汽车模型的全漆面图像数据进行获取,所述汽车模型的全漆面图像数据包括该汽车模型的左漆面图像数据、右漆面图像数据、前漆面图像数据、后漆面图像数据和上漆面图像数据;
步骤二:图像处理模块按照一定的处理方式对汽车模型的全漆面图像数据进行处理生成该汽车模型的全漆面缺陷数据;
步骤三:缺陷报警模块依据该汽车模型的全漆面缺陷数据对检测人员进行缺陷报警和缺陷区域显示。
进一步的,所述图像处理模块处理生成汽车模型的全漆面缺陷数据的处理方式如下:
S11:首先选定该汽车模型全漆面图像数据中的左漆面图像数据为待处理图像数据;
S12:获取待处理图像数据的所有像素点,标记为A1-1、A1-2、...、A1-b、A2-1、A2-2、...、A2-b、...、Aa-b,b≥1,a≥1;
所述a为待处理图像数据的像素点总列数,所述b为待处理图像数据的像素点总行数;
S13:获取待处理图像数据像素点A1-1、A1-2、...、A1-b、A2-1、A2-2、...、A2-b、...、Aa-b对应的像素值B1-1、B1-2、...、B1-b、B2-1、B2-2、...、B2-b、...、Ba-b;
S14:按照一定的获取步骤获取待处理图像数据的第1行的异常像素列表F1;
S15:按照S14计算获取待处理图像数据的第1、2、...、b的异常像素列表F1、F2、...、Fb;
S16:按照一定的合并规则将待处理图像数据的第1、2、...、b的异常像素列表F1、F2、...、Fb进行合并生成待处理图像数据的异常像素区域N1、N2、...、Nn,1≤n S17:按照一定的筛选步骤筛选获取待处理图像数据的缺陷额度值R1。 进一步的,所述S14中,异常像素列表F1的获取步骤如下: S141:创建待处理图像数据的第一行的空的异常像素列表F1,此时F1=[]; S142:以待处理图像数据的第一行为例,获取待处理图像数据像素点A1-a的像素值B1-a与其水平方向前一个像素点A1-(a-1)的像素值B1-(a-1)的差值C1-(a-1),a=2、3、...、b; S143:将C1-(a-1)与C进行大小比较,所述C为预设阈值: 若C1-(a-1)>C,则将待处理图像像素点A1-a和像素点A1-(a-1)重新标定为梯度像素点; S144:获取待处理图像数据的第一行的所有梯度像素点,标记为A1- S145:利用公式D1=d1-1计算获取待处理图像数据像素点A1-1和第一个梯度像素点A1- S146:若D1 S147:利用公式D2=d2-(d1+1)计算获取待处理图像数据像素点A1- 按照S146,对像素点总值D2进行判定生成待处理图像数据的第一行的第二个梯度像素段E2; S147:按照S145到S146计算获取待处理图像数据的第一行的所有梯度像素段E1、E2、...、Ee并将其添加入异常像素列表F1中,此时F1=[E1,E2,...,Ee,1≤e≤Z]。 进一步的,所述S16中,合并生成待处理图像数据的异常像素区域N1、N2、...、Nn的具体合并规则如下: S161:选定待处理图像数据的第一行的异常像素列表F1为待关联列表;选定待处理图像数据的第二行的异常像素列表F2为关联列表; S162:分别获取待关联列表和关联列表索引为0的梯度像素段G1、H1; S163:获取梯度像素段G1的初始像素点I1-i1,最终像素点I1-i2;1≤i1 获取梯度像素段H1的初始像素点J2-j1,最终像素点J2-j2;1≤j1 S164:利用公式k1= S165:将k1的绝对值与k进行大小比较,若k1 S166:反之,则判定梯度像素段G1和H1无关联,将待关联列表中所有的梯度像素段按照索引依次增大的顺序与H2进行关联判定,直至比较完全,获取所有的异常像素区域; S167:若待关联列表中的所有梯度像素段与H1都无关联,则按照S162到S166,依次将待关联列表中的所有梯度像素段与H2进行关联比较; S168:按照S161到S167,选定待处理图像数据的第二行的异常像素列表F2为待关联列表;选定待处理图像数据的第三行的异常像素列表F2为关联列表,计算会哦去所有的异常像素区域; S169:按照S168的顺序,计算获取待处理图像数据的第1、2、...、b的异常像素列表F1、F2、...、Fb的所有异常像素区域,标记为M1、M2、...、Mm,m≥1; S1610:将异常像素区域M1、M2、...、Mm中存在部分相同区域的异常像素区域删除,获取到最终的异常像素区域N1、N2、...、Nn。 进一步的,所述S17,筛选获取待处理图像数据的缺陷额度值R1的具体筛选步骤如下: S171:以异常像素区域N1为例,获取异常像素区域N1的最大横向跨度O1和最大纵向跨度O2,所述异常像素区域的最大横向跨度指的是该异常像素区域横向像素点最多的一行的像素点总量;所述异常像素区域的最大纵向跨度指的是该异常像素区域纵向像素点最多的一行的像素点总量; S172:利用公式p1= S173:按照S1610到S1612计算获取异常像素区域N1、N2、...、Nn的缺陷跨度值p1、p2、...、pn; S174:利用公式Q= S175:获取异常像素区域N1、N2、...、Nn的缺陷跨度值中比p大的异常像素区域,并将其重新标定为非正常像素区域,获取非正常像素区域的缺陷跨度值标记为T1、T2、...、Tt,1≤t S175:利用公式R1= 进一步的,所述缺陷报警模块包括缺陷判定单元、报警单元和显示单元,所述缺陷判定单元按照一定的判定步骤对该汽车模型的全漆面缺陷数据进行判定,具体的判定步骤如下: S21:以该汽车模型左漆面图像数据为例,获取该汽车模型左漆面图像数据的缺陷额度值,重新标定为U1; S22:若Umax 所述缺陷判定模块获取左漆面的非正常像素区域并将其传输到显示单元; 所述报警单元接收到缺陷判定单元传输的重度缺陷报警指令后实时对检测人员进行声音预警; 所述显示单元接收到缺陷判定单元传输的左漆面的非正常像素区域后对其进行标记并将其显示给检测人员; S23:若Umin≤U≤Umax,则判定当前汽车模型的左漆面中度受损并依据其生成中度缺陷报警指令,所述缺陷判定单元将中度缺陷报警指令传输到报警单元; 所述报警单元接收到缺陷判定单元传输的重度缺陷报警指令后每隔z,间隔z时间对检测人员进行声音预警,所述z为预设间隔时间; 所述显示单元接收到缺陷判定单元传输的左漆面的非正常像素区域后对其进行标记并将其显示给检测人员; S24:若U≤Umin,则判定当前汽车模型的左漆面微轻度缺陷,不做任何处理。 本发明的有益效果: 本发明通过设置视觉检测模块对汽车模型的左漆面图像数据、右漆面图像数据、前漆面图像数据、后漆面图像数据和上漆面图像数据进行采集,设置图像处理模块划定漆面图像数据中的基于每一行的异常像素段,并将其进行筛选合并划定该汽车模型基于左、右、前、后和上漆面图像的异常像素区域,通过对左、右、前、后和上漆面图像的异常像素区域进行计算获取缺陷额度值,设置缺陷报警模块基于左、右、前、后和上漆面图像的异常像素区域向检测人员报警和显示缺陷区域,一方面针对汽车模型的漆面进行针对检测,细化了汽车模型漆面损害程度,基于漆面的异常像素区域采集不同程度的报警,另一方面增加了汽车模型漆面缺陷检测的准确率,加快了检测的效率。 附图说明 下面结合附图对本发明作进一步的说明。 图1是本发明的系统框图。 具体实施方式 下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。 如图1所示,基于人工智能的汽车模型视觉检测方法,上述方法是基于人工智能的汽车模型视觉检测系统进行的,该系统包括视觉检测模块、图像处理模块和缺陷报警模块; 所述视觉检测模块用于对汽车模型的全漆面图像数据进行获取,所述汽车模型的全漆面图像数据包括该汽车模型的左漆面图像数据、右漆面图像数据、前漆面图像数据、后漆面图像数据和上漆面图像数据; 在本实施例中,所述汽车模型的左、右、前、后,上漆面都是以车头到车位的方向为基准;在本实施例中,所述汽车模型的左漆面图像数据为该汽车模型的左侧车身表面被油漆覆盖区域;所述汽车模型的右漆面图像数据为该汽车模型的右侧车身表面被油漆覆盖区域;所述汽车模型的前漆面图像数据为该汽车模型的前侧车身表面被油漆覆盖区域;所述汽车模型的后漆面图像数据为该汽车模型的后侧车身表面被油漆覆盖区域;所述汽车模型的上漆面图像数据为该汽车模型的顶部车身表面被油漆覆盖区域; 所述视觉监测模块将该汽车模型的全漆面图像数据传输到图像处理模块; 所述图像处理模块用于对汽车模型的全漆面图像数据进行处理,所述图像处理模块接收到视觉检测模块传输的该汽车模型的全漆面图像数据后按照一定的处理方式对其进行处理,具体的处理方式如下: S11:首先选定该汽车模型全漆面图像数据中的左漆面图像数据为待处理图像数据; S12:获取待处理图像数据的所有像素点,标记为A1-1、A1-2、...、A1-b、A2-1、A2-2、...、A2-b、...、Aa-b,b≥1,a≥1; 所述a为待处理图像数据的像素点总列数,所述b为待处理图像数据的像素点总行数; S13:获取待处理图像数据像素点A1-1、A1-2、...、A1-b、A2-1、A2-2、...、A2-b、...、Aa-b对应的像素值B1-1、B1-2、...、B1-b、B2-1、B2-2、...、B2-b、...、Ba-b; S14:按照一定的获取步骤获取待处理图像数据的第1行的异常像素列表F1,具体的获取步骤如下: S141:创建待处理图像数据的第一行的空的异常像素列表F1,此时F1=[]; S142:以待处理图像数据的第一行为例,获取待处理图像数据像素点A1-a的像素值B1-a与其水平方向前一个像素点A1-(a-1)的像素值B1-(a-1)的差值C1-(a-1),a=2、3、...、b; S143:将C1-(a-1)与C进行大小比较,所述C为预设阈值: 若C1-(a-1)>C,则将待处理图像像素点A1-a和像素点A1-(a-1)重新标定为梯度像素点; S144:获取待处理图像数据的第一行的所有梯度像素点,标记为A1- S145:利用公式D1=d1-1计算获取待处理图像数据像素点A1-1和第一个梯度像素点A1- S146:若D1 S147:利用公式D2=d2-(d1+1)计算获取待处理图像数据像素点A1- 按照S146,对像素点总值D2进行判定生成待处理图像数据的第一行的第二个梯度像素段E2; S147:按照S145到S146计算获取待处理图像数据的第一行的所有梯度像素段E1、E2、...、Ee并将其添加入异常像素列表F1中,此时F1=[E1,E2,...,Ee,1≤e≤Z]; S15:按照S14计算获取待处理图像数据的第1、2、...、b的异常像素列表F1、F2、...、Fb; S16:按照一定的合并规则将待处理图像数据的第1、2、...、b的异常像素列表F1、F2、...、Fb进行合并生成待处理图像数据的异常像素区域N1、N2、...、Nn,1≤n S161:选定待处理图像数据的第一行的异常像素列表F1为待关联列表;选定待处理图像数据的第二行的异常像素列表F2为关联列表; S162:分别获取待关联列表和关联列表索引为0的梯度像素段G1、H1; S163:获取梯度像素段G1的初始像素点I1-i1,最终像素点I1-i2;1≤i1 获取梯度像素段H1的初始像素点J2-j1,最终像素点J2-j2;1≤j1 S164:利用公式k1= S165:将k1的绝对值与k进行大小比较,若k1 S166:反之,则判定梯度像素段G1和H1无关联,将待关联列表中所有的梯度像素段按照索引依次增大的顺序与H2进行关联判定,直至比较完全,获取所有的异常像素区域; S167:若待关联列表中的所有梯度像素段与H1都无关联,则按照S162到S166,依次将待关联列表中的所有梯度像素段与H2进行关联比较; S168:按照S161到S167,选定待处理图像数据的第二行的异常像素列表F2为待关联列表;选定待处理图像数据的第三行的异常像素列表F2为关联列表,计算会哦去所有的异常像素区域; S169:按照S168的顺序,计算获取待处理图像数据的第1、2、...、b的异常像素列表F1、F2、...、Fb的所有异常像素区域,标记为M1、M2、...、Mm,m≥1; S1610:将异常像素区域M1、M2、...、Mm中存在部分相同区域的异常像素区域删除,获取到最终的异常像素区域N1、N2、...、Nn; S17:按照一定的筛选步骤筛选获取待处理图像数据的缺陷额度值R1; S171:以异常像素区域N1为例,获取异常像素区域N1的最大横向跨度O1和最大纵向跨度O2,所述异常像素区域的最大横向跨度指的是该异常像素区域横向像素点最多的一行的像素点总量;所述异常像素区域的最大纵向跨度指的是该异常像素区域纵向像素点最多的一行的像素点总量; S172:利用公式p1= S173:按照S1610到S1612计算获取异常像素区域N1、N2、...、Nn的缺陷跨度值p1、p2、...、pn; S174:利用公式Q= S175:获取异常像素区域N1、N2、...、Nn的缺陷跨度值中比p大的异常像素区域,并将其重新标定为非正常像素区域,获取非正常像素区域的缺陷跨度值标记为T1、T2、...、Tt,1≤t S175:利用公式R1= S18:按照S11到S17,依次选定该汽车模型全漆面图像数据中的右漆面图像数据、前漆面图像数据、后漆面图像数据和上漆面图像数据为待处理数据,计算获取该汽车模型的左漆面、右漆面、前漆面、后漆面和上漆面图像数据的缺陷额度值R2、R3、R4和R5并依据其生成该汽车模型的全漆面缺陷数据; 所述图像处理模块将该汽车模型的全漆面缺陷数据传输到缺陷报警模块,所述缺陷报警模块包括缺陷判定单元、报警单元和显示单元,所述缺陷报警模块接收到图像处理模块传输的该汽车模型的全漆面缺陷数据后将其传输到缺陷判定单元,所述缺陷判定单元接收到缺陷报警模块传输的该汽车模型的全漆面缺陷数据后按照一定的判定步骤对其进行判定,具体的判定步骤如下: S21:获取该汽车模型左漆面图像数据的缺陷额度值,重新标定为U1; S22:若Umax 所述缺陷判定模块获取左漆面的非正常像素区域并将其传输到显示单元; 所述报警单元接收到缺陷判定单元传输的重度缺陷报警指令后实时对检测人员进行声音预警; 所述显示单元接收到缺陷判定单元传输的左漆面的非正常像素区域后对其进行标记并将其显示给检测人员; S23:若Umin≤U≤Umax,则判定当前汽车模型的左漆面中度受损并依据其生成中度缺陷报警指令,所述缺陷判定单元将中度缺陷报警指令传输到报警单元; 所述报警单元接收到缺陷判定单元传输的重度缺陷报警指令后每隔z,间隔z时间对检测人员进行声音预警,所述z为预设间隔时间; 所述显示单元接收到缺陷判定单元传输的左漆面的非正常像素区域后对其进行标记并将其显示给检测人员; S24:若U≤Umin,则判定当前汽车模型的左漆面微轻度缺陷,不需要进行修补; S25:按照S21到S24,依次对该汽车模型的左漆面、右漆面、前漆面、后漆面和上漆面进行缺陷判定; 在说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。 以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。 以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 基于视觉检测的集装箱箱孔高精准检测方法
- 一种基于汽车车门加工用涂胶视觉检测系统及检测方法
- 一种基于视觉和人工智能的跌倒检测系统及检测报警方法
- 一种基于视觉和人工智能的跌倒检测系统及检测报警方法