一种耦合减振器的机载光电系统整体动力学建模方法及建模系统
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及航空工程技术领域,尤其涉及一种耦合减振器的机载光电系统整体动力学建模方法及建模系统。
背景技术
机载光电系统具有机动、灵活的特点,广泛应用于情报搜查、国防监测、变化检测、精确测图和目标探测及预警等多个领域。但是,与空基、地基成像环境相比,空基环境存在载机姿态运动、发动机引起的振动、载体飞行带来的气动力影响以及载荷内部高频机械谐振等复杂多源干扰,影响成像质量。尤其当系统口径和重量较大时,为保证载机的气动特性不被破坏,确保载机与光电系统整体刚度和稳定性,光电系统必须与载机固定连接,减振器只能布置在内外框架之间,在受外力作用减振器发生振动时,其内部弹性多孔结构的摩擦、挤压和变形耗散大量能量,导致整个减振器发生非线性形变,对内外框架的运动耦合进复杂非线性干扰。由此引入了耦合减振器的机载光电系统动力学问题。
现有方法一般是对单个框架进行动力学分析与建模,无法表征与之连接的减振器带来的运动耦合,也有学者将伺服分系统的内外框架视为整体进行动力学建模,但都没有考虑减振器与框架间的耦合作用,或没有考虑内外框架同时运动的约束,未能将包含多组减振器和内外框架的光电系统整体上进行建模。机载光电系统与一般伺服机构不同,为了扩大收容视场,外框架需要随动内框架运动,因此装置在内外框架间的多组减振器会通过运动耦合和位置耦合叠加作用到内外框架上,影响系统的运动。
发明专利CN110032198A基于多体动力学建立了水下特种机器人艇体-机械手模型,发明专利CN113536624基于刚柔耦合多体动力学建立舰载拦阻着舰过程的动力学模型,但上述方法考虑的研究对象、结构特征、耦合特性与机载光电系统有较大区别,很难进行参考。
发明内容
鉴于现有技术存在的不足,本发明的目的是提供一种耦合减振器的机载光电系统整体动力学建模方法,以解决现有基动力学建模方法未从整体角度建立耦合减振器的动力学模型无法的缺点。
为解决上述技术问题,本申请采用下述技术方案:
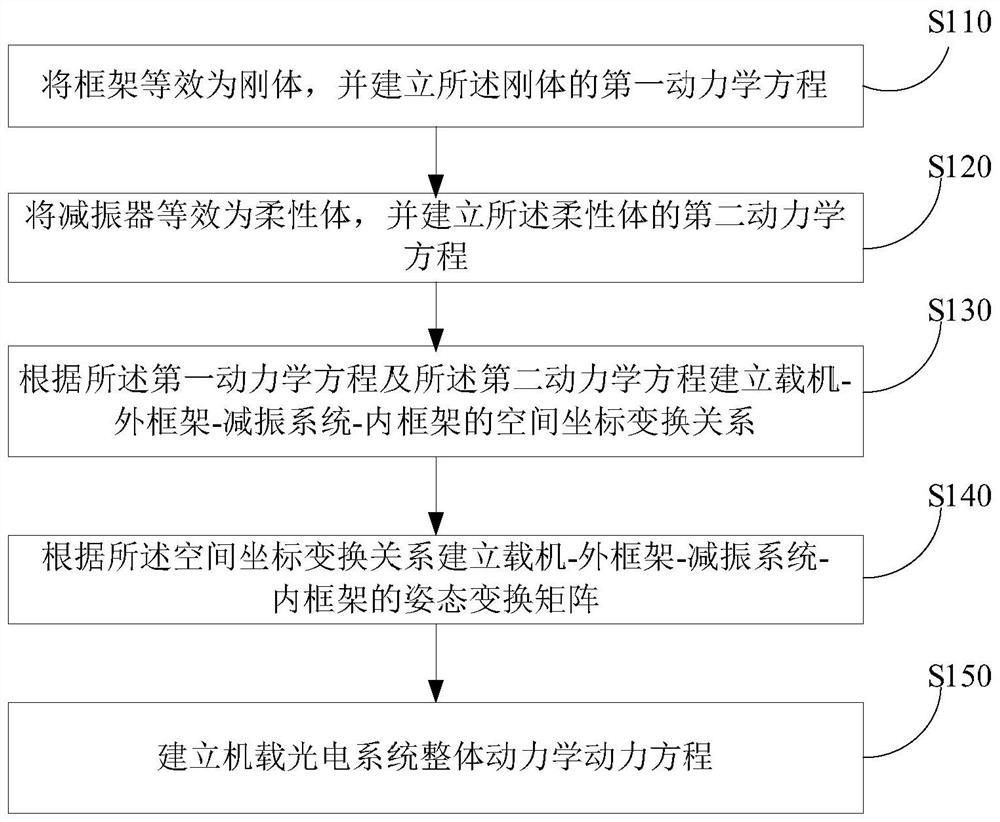
本申请提供了一种耦合减振器的机载光电系统整体动力学建模方法,包括下述步骤:
将框架等效为刚体,并建立所述刚体的第一动力学方程;
将减振器等效为柔性体,并建立所述柔性体的第二动力学方程;
根据所述第一动力学方程及所述第二动力学方程建立载机-外框架-减振系统-内框架的空间坐标变换关系;
根据所述空间坐标变换关系建立载机-外框架-减振系统-内框架的姿态变换矩阵;
建立机载光电系统整体动力学动力方程。
在其中一些实施例中,在将框架等效为刚体,并建立所述刚体的第一动力学方程的步骤中,具体为:根据框架的运动特征以及刚体定义,将其等效为单自由度刚体结构,描述所述刚体的第一动力学方程为:
其中:θ
在其中一些实施例中,在将减振器等效为柔性体,并建立所述柔性体的第二动力学方程的步骤中,具体为:根据减振器的非线性形变以及柔性体定义,将减振器等效为柔性体,并建立所述柔性体的第二动力学方程,所述第二动力学方程为:
其中:m
在其中一些实施例中,在根据所述第一动力学方程及所述第二动力学方程建立载机-外框架-减振系统-内框架的空间坐标变换关系的步骤中,具体包括:
分别在载体质心以及框架的刚体B
在减振器的柔性体B
采用以载机为基础坐标系统,外框架、多组减振器构成的减振系统、内框架为相对坐标系的刚柔耦合多体动力学建模方法,建立坐标变换关系。
在其中一些实施例中,在根据所述空间坐标变换关系建立载机-外框架-减振系统-内框架的姿态变换矩的步骤中,具体包括下述步骤:
根据欧拉定理,阵欧拉角的三次坐标变换矩阵的乘积可以描述内外框架和减振系统坐标系间的姿态变换矩阵,以欧拉转角为θ的方向余弦矩阵的标准形式为:
将所述机载光电系统的载机坐标系、外框架坐标系、减振系统浮动坐标系、内框架坐标系能够通过相对转角组成的三个变换矩阵建立载机-外框架-减振系统-内框架的姿态变换矩。
在其中一些实施例中,在建立机载光电系统整体动力学动力方程的步骤中,具体包括下述步骤:利用哈密尔顿原理和第二类拉格朗日方程建立系统整体动力学方程。
在其中一些实施例中,在利用哈密尔顿原理和第二类拉格朗日方程建立机载光电系统整体动力学方程的步骤中,具体包括下述步骤:
选取外框架B
q=(θ
采用第二类拉格朗日方程,建立外框架-减振器-内框架动力学模型:
其中:q
另外,本申请还提供了一种耦合减振器的机载光电系统整体动力学建模系统,包括:刚体动力学构建单元,用于将框架等效为刚体,并建立所述刚体的第一动力学方程;柔性体动力学构建单元,用于将减振器等效为柔性体,并建立所述柔性体的第二动力学方程;空间坐标变换单元,用于根据所述第一动力学方程及所述第二动力学方程建立载机-外框架-减振系统-内框架的空间坐标变换关系;姿态变换单元,用于根据所述空间坐标变换关系建立载机-外框架-减振系统-内框架的姿态变换矩阵;整体动力学动力构建单元,用于建立机载光电系统整体动力学动力方程。
本发明的耦合减振器的机载光电系统整体动力学建模方法及建模系统,相对于现有技术具有以下有益效果:
本发明的耦合减振器的机载光电系统整体动力学建模方法及建模系统,将框架等效为刚体,并建立所述刚体的第一动力学方程;将减振器等效为柔性体,并建立所述柔性体的第二动力学方程;根据所述第一动力学方程及所述第二动力学方程建立载机-外框架-减振系统-内框架的空间坐标变换关系;根据所述空间坐标变换关系建立载机-外框架-减振系统-内框架的姿态变换矩阵;建立机载光电系统整体动力学动力方程,上述建模方法及建模系统,将光电系统的内外框架和多组减振器看作一个整体,充分考虑三者间的干扰力矩耦合和位置耦合,利用哈密尔顿原理和第二类拉格朗日方程建立系统整体动力学方程,建模精度更高。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本申请实施例1提供的耦合减振器的机载光电系统整体动力学建模方法的步骤流程图。
图2为本发明实施例1的提供的机载光电系统内外框架与减振器间的运动耦合示意图。
图3为本发明实施例1提供的机载光电系统载机-外框架-减振系统-内框架的空间坐标系。
图4为本发明实施例1提供的机载光电系统载机-外框架-减振系统-内框架坐标变换示意图。
图5为本申请实施例2提供的耦合减振器的机载光电系统整体动力学建模系统的结构示意图。
具体实施方式
下面将结合本发明实施方式,对本发明实施方式中的技术方案进行清楚、完整的描述,显然,所描述的实施方式仅仅是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
实施例1
请参阅图1,本申请实施例提供了一种耦合减振器的机载光电系统整体动力学建模方法,包括下述步骤S110至步骤S150,以下详细说明各个步骤的实现方式。
步骤S110:将框架等效为刚体,并建立所述刚体的第一动力学方程。
请参阅图2,图2为本发明一种实施例的机载光电系统内外框架与减振器间的运动耦合示意图。
图2所示的机载光电系统中,内外框架间沿运动中心轴均匀布置多个减振器以隔离振动。在光电系统成像过程中,载机的运动造成内外框架之间的相对运动,环境的振动也会引起减振器的非线性运动。本发明的实施例中,在每个减振器周围专门配置位置传感器,用于实时测量减振器的非线性形变量,由此可以计算出减振器产生的作用力矩,进而分析减振器与内外框架间运动耦合。
可以理解,减振器布置在内外框架之间。因为为了测量减振器的运动位移,在其附近加入位置传感器,从而能够进行整体建模,必须实时测量不同减振器的变形量,由此可以计算减振器运动对框架的力矩耦合和位置耦合。
本发明中,根据光电系统结构特征和运动关系,充分考虑了减振器与机载光电系统框架之间的干扰力矩耦合和位置耦合。
具体地,分析减振器非线性运动对内外框架运动产生的干扰力矩耦合。当光电系统采用多个对称布置的减振器隔离垂直于飞行方向的振动时,其他方向的运动自由度被限制,绕三个方向的旋转运动也被限制。基于牛顿第三定律,垂直于载机飞行方向的两个减振器的非线性形变产生力矩,并通过内外框架的旋转轴耦合到内外框架上,形成干扰力矩耦合。因此,在建立内外框架的动力学方程时,需要考虑多个减振器变形产生的干扰力矩。同时,内外框架间发生相对运动后,会产生作用力矩,这个作用力矩也会作用到减振器中,影响减振器的非线性形变,也需要在动力学建模时考虑进去。
在其中一些实施例中,在将框架等效为刚体,并建立所述刚体的第一动力学方程的步骤中,具体为:根据框架的运动特征以及刚体定义,将其等效为单自由度刚体结构,描述所述刚体的第一动力学方程为:
其中:θ
步骤S120:将减振器等效为柔性体,并建立所述柔性体的第二动力学方程。
请再参阅图2,可根据光电系统结构特征和运动关系,考虑外框架跟随内框架运动,分析减振器的非线性形变对内外框架的运动角度耦合。
具体地,由于载机姿态运动、发动机引起的振动等干扰的随机性和不均匀性,不同减振器的线运动x
可以理解,根据减振器的非线性形变以及柔性体定义,将其处理为柔性体。在受外力作用减振器发生振动时,其内部弹性多孔结构的摩擦、挤压和变形耗散大量能量,导致整个减振器发生非线性形变。因此,其动力学特征具有三次非线性弹簧、粘性阻尼及线性弹簧-干摩擦副三个环节,用粘性阻尼双线性滞迟模型来综合描述其动力学特性:
其中:m
其中Y
所述减振器非线性形变由安装在减振器附近的位置传感器实时测量。
步骤130:根据所述第一动力学方程及所述第二动力学方程建立载机-外框架-减振系统-内框架的空间坐标变换关系。
可以理解,考虑系统各结构的运动机理,外框架B1和内框架B2可以处理为刚体,减振器B3,B4可以处理为柔性体。
具体地,根据系统相互运动关系,分别在载体质心以及刚体B
请参阅图3,为本实施例的机载光电系统载机-外框架-减振系统-内框架的空间坐标系。
步骤S140:根据所述空间坐标变换关系建立载机-外框架-减振系统-内框架的姿态变换矩阵。
具体地,根据欧拉定理,欧拉角的三次坐标变换矩阵的乘积可以描述内外框架和减振系统坐标系间的姿态变换矩阵,以欧拉转角为θ的方向余弦矩阵的标准形式为:
将所述机载光电系统的载机坐标系、外框架坐标系、减振系统浮动坐标系、内框架坐标系能够通过相对转角组成的三个变换矩阵建立空间关系。
请参阅图4,为本发明一种实施例的机载光电系统载机-外框架-减振系统-内框架坐标变换示意图。
例如:以载机坐标系向外框架坐标系转换为例,当采用z-x-y的转动顺序时,各欧拉转角依次记为γ,β,
步骤S150:建立机载光电系统整体动力学动力方程。
在其中一些实施例中,在建立机载光电系统整体动力学动力方程的步骤中,具体包括下述步骤:利用哈密尔顿原理和第二类拉格朗日方程建立系统整体动力学方程。
具体地,采用统一的广义坐标描述各结构的刚性运动和非线性形变,利用哈密尔顿原理和第二类拉格朗日方程建立系统整体动力学方程。
根据载机、外框架、减振系统、内框架间的运动关系递推,可以依次得到外框架、减振系统、内框架的运动学描述。
选取外框架B
q=(θ
采用第二类拉格朗日方程,能够建立外框架-减振器-内框架动力学模型:
其中:q
减振器的非线性运动还会与框架运动形成位置耦合。具体表现在,基于所述建模方法进行光电系统外框架随动内框架控制时,随动误差e
本申请提供的上述建模方法,将光电系统的内外框架和多组减振器看作一个整体,充分考虑三者间的干扰力矩耦合和位置耦合,利用哈密尔顿原理和第二类拉格朗日方程建立系统整体动力学方程,建模精度更高。
实施例2
请参阅图5,本申请还提供了一种耦合减振器的机载光电系统整体动力学建模系统,包括:刚体动力学构建单元110,用于将框架等效为刚体,并建立所述刚体的第一动力学方程;柔性体动力学构建单元120,用于将减振器等效为柔性体,并建立所述柔性体的第二动力学方程;空间坐标变换单元130,用于根据所述第一动力学方程及所述第二动力学方程建立载机-外框架-减振系统-内框架的空间坐标变换关系;姿态变换单元140,用于根据所述空间坐标变换关系建立载机-外框架-减振系统-内框架的姿态变换矩阵;整体动力学动力构建单元150,用于建立机载光电系统整体动力学动力方程。
本实施例提供的耦合减振器的机载光电系统整体动力学建模系统其详细的工作方式可以参见实施例1,这里不再赘述。
本申请提供的上述建模系统,将光电系统的内外框架和多组减振器看作一个整体,充分考虑三者间的干扰力矩耦合和位置耦合,利用哈密尔顿原理和第二类拉格朗日方程建立系统整体动力学方程,建模精度更高。
以上所述仅为本发明的较佳实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 盘状磁悬浮转子系统动力学建模方法及耦合动力学方程组
- 用于对水动力学和沉积物运移的耦合系统进行建模的系统和方法