一种基于光伏供能的全自动植树机器人
文献发布时间:2023-06-19 18:30:43
技术领域
本本发明属于自动植树设备技术领域,尤其涉及一种基于光伏供能的全自动植树机器人。
背景技术
种植树木可解决水土流失、土地荒漠化等生态环境问题。
现有技术中,植树机是机械化植树造林的主要设备,多与拖拉机配套使用。
现有技术中的植树机存在如下缺陷:植树机械为半自动,需要人工进行控制,植树过程中的人工成本支出较高;植树机械主要采用燃油提供能量,其排出的废气影响生态环境修复效果且装置消耗化石能源,不符合节能减排要求。
因此,实有必要提供一种新的基于光伏供能的全自动植树机器人解决上述技术问题。
发明内容
本发明所要解决的技术问题在于针对上述现有技术中的不足,公开了一种基于光伏供能的全自动植树机器人,其采用太阳能光伏板对所有模块进行供能,无需外接动力源,节能减排;利用空气取水技术自主制水并灌溉,提高了栽种植被的存活率;自主植树模块能实现自动化植树,工作效率高且可降低了人工工作强度及成本。
本发明解决其技术问题所采用的技术方案是:一种基于光伏供能的全自动植树机器人,包括:行走履带、车底架、车顶架、太阳能供能模块、空气取水灌溉模块、自主植树模块、拢土夯实模块,所述自主植树模块包括挖坑组件、松土组件和植树灌溉机构;所述车底架设于所述行走履带上方,所述车顶架设于所述车底架上方,所述挖坑组件和松土组件安装于所述车底架同一端,且所述松土组件安装于所述车底架的上部,所述松土组件安装于所述车底架的下部,所述拢土夯实模块安装于所述车底架远离所述挖坑组件的一侧,所述自主植树模块位于所述挖坑组件和拢土夯实模块之间,且所述自主植树模块沿上下方向贯穿所述车顶架和车底架,所述空气取水灌溉模块包括:蓄水罐和分别设于所述蓄水罐两侧的两套吸水单元,所述蓄水罐安装于所述车底架上,两套所述吸水单元分别位于所述自主植树模块下部的两侧,所述太阳能功能模块包括两套供能组件,两套所述供能组件分别安装于所述车顶架上,且两套所述供能组件分别安装于所述自主植树模块上部的两侧。
与现有技术相比,本发明的基于光伏供能的全自动植树机器人的创新点和有益效果如下:
本发明的基于光伏供能的全自动植树机器人主要由五部分构成,太阳能供能模块、空气取水灌溉模块、自主植树模块、拢土夯实模块、智能控制模块;通过各个模块相互配合,协同工作,使得装置能够为生态环境的修复出力,提供了一种新的生态环境修复方案。本装置的创新点如下:采用太阳能光伏板对所有模块进行供能,无需外接动力源,节能减排;利用空气取水技术自主制水并灌溉,提高了栽种植被的存活率,降低生态修复成本;装置采用履带化行进作业方式,能够适应各种复杂的工作环境,适应性强;智能植树技术,播种速度提升,装置工作效率大大提高且进一步降低了人工工作强度及成本;巧妙采用多种机构实现树苗栽种全过程,节能减排;拢土夯实模块可替换不同直径中空管,自适应不同种类树苗的栽种,确保树苗与地面垂直且移栽稳固;装置结构简单、易维护、成本低、高效作业,符合生态环境修复政策,市场前景广阔。
附图说明
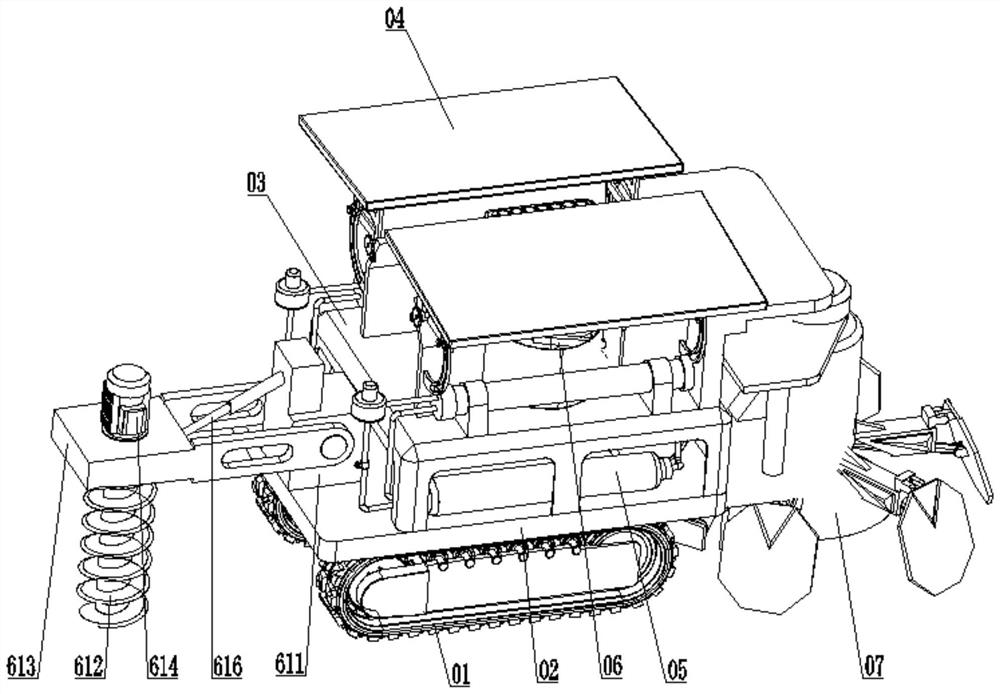
图1为本发明的整体结构立体示意图一。
图2为本发明的整体结构立体示意图二(松土组件中未装植树开沟犁)。
图3为本发明中:空气取水灌溉模块的整体结构示意图。
图4为本发明中:太阳能真空管式吸附制水装置结构示意图。
图5为本发明中:松土组件的结构示意图。
图6为本发明中:植树灌溉机构的立体示意图。
图7为本发明中:植树灌溉机构的俯视示意图。
图8为本发明中:灌溉喷头结构示意图。
图9为本发明的整体结构主视示意图。
图10为本发明中:供能组件的结构示意图。
图11为本发明中:拢土夯实模块的主视示意图。
图12为本发明中:拢土夯实模块的俯视示意图。
图13为本发明中:拢土夯实模块的局部示意图。
图14为本发明的能量传递路线图。
图15为滑移式排布的苗杯链结构。
图16为圆盘式排布的苗杯链结构。
图17为链式排布的苗杯链结构。
附图标记说明:
01.行走履带,02.车底架,03.车顶架,04.太阳能供能模块,05.空气取水灌溉模块,06.自主植树模块,07.拢土夯实模块。
41.供能组件。
51.蓄水罐,52.太阳能真空管式吸附制水装置,53.离心风机,54.电磁阀,55.冷凝器。
411.电池安装板,412.前支撑杆,413.后支撑杆,414.连杆,415.铰接轴,416.导向杆,417.圆弧形导向槽,418.从动齿轮,419.主动齿轮,421.固定底板。
521.内通风管,522.吸附层,523.支撑架,524.真空管内层玻璃,525.真空管外层玻璃。
611.竖向安装座,612.钻头,613.水平安装座,614.钻头驱动电机,616.伸缩缸。
621.犁安装耳座。
631.储苗盘,632漏苗管,633.剪刀式升降结构,634.苗杯,635.柔性带,636.拨动轮,637.被动轮,638.灌溉喷头。
6321.出苗口。
6361.拨槽。
1.压实块护罩,2.驱动块,3.连接杆,4.弹性件,5.导向块,6.底座,7.连接件,8.导板,9.牵引件,10.压土件,11.限位槽,13.拢土板,14.复位件。
具体实施方式
下面结合附图所示的各实施方式对本发明进行详细说明,但应当说明的是,这些实施方式并非对本发明的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本发明的保护范围之内。
下面结合附图1-17对本发明作进一步的说明。
请重点参考图1-4,本发明公开了一种基于光伏供能的全自动植树机器人,包括:行走履带01、车底架02、车顶架03、太阳能供能模块04、空气取水灌溉模块05、自主植树模块06、拢土夯实模块07,自主植树模块06包括挖坑组件、松土组件和植树灌溉机构;车底架02设于行走履带01上方,车顶架03设于车底架02上方,挖坑组件和松土组件安装于车底架02同一端,且松土组件安装于车底架02的上部,松土组件安装于车底架02的下部,拢土夯实模块07安装于车底架02远离挖坑组件的一侧,自主植树模块06位于挖坑组件和拢土夯实模块07之间,且自主植树模块06沿上下方向贯穿车顶架03和车底架02,空气取水灌溉模块05包括:蓄水罐51和分别设于蓄水罐51两侧的两套吸水单元,蓄水罐51安装于车底架02上,两套吸水单元分别位于自主植树模块06下部的两侧,太阳能功能模块包括两套供能组件41,两套供能组件41分别安装于车顶架03上,且两套供能组件41分别安装于自主植树模块06上部的两侧。
本实施方式中,本发明通过对传统人工栽苗播种方式进行研究,将栽树苗的动作分解为:挖苗坑、栽苗、灌溉、填土夯实四个动作,分析各个动作的运动实质并应用机械化部件实现,可将人工的播种过程集于全自动一体化机械,解放劳动力,降低劳动成本,提高生态环境修复效益。
本实施方式中的太阳能功能模块为本发明的基于光伏供能的全自动植树机器人的供能装置。装置搭载的太阳能光伏板将太阳能转化为电能并储存在蓄电池中,为装置各个模块的正常工作供能。
本发明的基于光伏供能的全自动植树机器人适用于在我国西北地区使用。由于我国西北地区太阳能资源丰富,太阳能光伏板能够保证装置的正常稳定工作。
空气取水灌溉模块05采用空气取水技术,以硅胶(二氧化硅)为吸附材料,并使用真空管保温,真空管内部设有夹层,通过吸附材料、真空管与冷凝器55间的配合,使装置具有高效的空气取水能力,确保树苗在被放入树坑后能够第一时间接受灌溉。
位于装置前端中部的挖坑组件、前端底部的松土组件,主要完成植树环节的松土、挖坑工作,位于装置中部的自主植树模块06具有自动送树和及时灌溉的功能,在装置前进过程中自动进行植树灌溉、拢土压实的活动,装置后端包含的拢土夯实机构能够在植树种草之后对树苗附近土地进行回土和夯实。
请重点参考图9-10,根据本发明的具体实施方式,供能组件41包括收尾顺次铰接且共同组成铰链四杆结构的电池安装板411、前支撑杆412、后支撑杆413和连杆414,前支撑杆412与连杆414的铰接点设为主动旋转中心,后支撑杆413与连杆414之间通过铰接轴415相连,供能组件41还包括与前支撑杆412固定相连的导向杆416,导向杆416上设有以主动旋转中心为圆心的圆弧形导向槽417,铰接轴415设于圆弧形导向槽417内且铰接轴415与导向杆416滑动相连,供能组件41还包括设于主动旋转中心且用于驱动导向杆416转动的旋转动力组件,旋转动力组件包括:与导向杆416固定相连的从动齿轮418、与从动齿轮418啮合的主动齿轮419、与主动齿轮419相连且用于驱动主动齿轮419旋转的伺服电机;供能组件41还包括固定底板421,前支撑杆412远离电池安装板411的一端铰接于固定底板421的顶部,导向杆416的下部固定于固定底板421上。
本实施方式中,伺服电机可根据需要进行正反两个方向的旋转,伺服电机转动,带动主动齿轮419及从动齿轮418旋转,从而带动连杆414旋转,连杆414旋转时带动铰接轴415沿圆弧形导向槽417滑动,以实现电池安装板411角度的调整。本用本实施方式的太阳能功能模块,可根据时间进行自动实现电池安装板411角度的调节,从而实现太阳能电池板的自动追光功能,进一步提高太阳能电池板的利用率。
根据本发明的具体实施方式,电池安装板411上安装有太阳能电池板。
根据本发明的具体实施方式,吸水单元包括:太阳能真空管式吸附制水装置52、离心风机53、电磁阀54和冷凝器55,冷凝器55的一端与蓄水罐51连通,冷凝器55的另外一端包括:与太阳能真空管式吸附制水装置52直接相连的第一管路、与电磁阀54、离心风机53与太阳能真空管式吸附制水装置52相连的第二管路;太阳能真空管式吸附制水装置52包括由内层至外侧依次间隔设置的内通风管521、吸附层522、支撑架523、真空管内层玻璃524和真空管外层玻璃525,吸附层522由吸附材料填充而成,吸附材料为二氧化硅;真空管外层玻璃525外设有真空管吸热层。
本实施方式中,空气取水灌溉模块05主要利用空气取水技术,以硅胶(二氧化硅)为吸附材料,并使用真空管保温,真空管内部设有夹层,通过吸附材料、真空管、风机与冷凝器55间的配合,实现装置高效的空气取水能力。下面具体阐述本发明空气取水灌溉模块05的工作原理,空气取水灌溉模块05的工作原理主要分为以下两个阶段。
(1)空气中水的脱附过程
真空管吸热层吸收太阳光后,转化为热能,热能经传导或辐射加热真空管内部的吸附材料,材料升温,释放出水分。此时,风机驱动系统内部空气进行内循环,真空管内的高温湿空气在离心风机53的驱动下,进入冷凝器55中,冷凝器55是单层的玻璃管,可与环境换热,于是来自真空管的高温湿空气被冷却,释放出水分,凝结在冷凝器55的内壁上,最终滑落到玻璃管的底部,并聚集流入蓄水罐51中,实现淡水生产。
(2)空气中水的吸附过程
脱附完成后,吸附材料中已无水分,需从环境空气中获得水蒸气。此时,通过电磁阀54将真空管与外界的连通且开启风机,驱动环境空气从安装有电磁阀54的一个管道进口进入装置。环境空气直接进入到真空管中,与吸附材料直接接触,材料吸收空气中的水分,同时放出吸附热被空气带走。空气升温后从另一个有电磁阀54的出口输出到环境。
储存在蓄水罐51中的淡水将在树苗播种后通过管路灌溉,确保树苗的成活率,降低树苗购入成本。
请重点参考图1及图5,根据本发明的具体实施方式,挖坑组件包括竖向安装座611、钻头612、水平安装座613、钻头驱动电机614、伸缩缸616;竖向安装座611固定于车底架02一侧顶部,水平安装座613的一端与竖向安装座611铰接,钻头612设于竖向安装座611的另一端,且钻头驱动电机614安装于水平安装座613上,且钻头驱动电机614与钻头612相连用于驱动钻头612旋转,伸缩缸616的两端分别与水平安装座613和竖向安装座611铰接;松土组件包括设于车底架02的下部且正对竖向安装座611设置的犁安装耳座621和与安装耳座可拆卸相连的植树开沟犁。
本实施方式中,在挖坑前采用犁地机构进行松土工作,在减小挖坑钻头612损耗的同时,进一步降低植树机器人的功率损耗。通过伸缩缸616的伸缩,可调整钻头612的角度。
更具体地,钻头612为螺旋齿式钻头612,采用钻头612的长度为:1.4m,圆周直径为0.5m。通过采用螺旋齿式钻头612来达到松土挖坑的目的。
螺旋齿式钻头612主要由钻杆、上螺旋齿、下螺旋齿、钻尖等组成。大小螺旋齿按一定的几何角度焊接而成,而且切削面成一定的刀刃。螺旋齿与旋转方向呈径向后掠,由于下面的螺旋齿刀刃短,上面的螺旋齿刀刃长,这样可以分段进行切削土壤入土性能好,切削阻力小,有利于切断草根、树根和排除石块。在草地上工作时,后掠的刀齿可防止缠草,同时,被疏松的土壤留在坑内形成小丘。刀齿的螺旋升角和齿宽随着直径的增大而逐渐变小。刀齿用65Mn或SiMn钢材锻成的,采取单表面处理,以达到刃口自动磨刃。该型式钻头适于手提式挖坑机配套,特别适用于皆伐、择伐迹地、坡度较大或立地条件较差的造林地穴状整地。由于钻头的螺旋齿与刀杆是套装,并用销轴固定,其装拆和刃磨都较方便。
请重点参考图6-8,根据本发明的具体实施方式,植树灌溉机构包括送苗、植树执行机构,送苗、植树执行机构包括储苗盘631,储苗盘631的一侧设有漏苗管632,漏苗管632的上部与储苗盘631内部连通,漏苗管632的下部为出苗口6321,储苗盘631的下部设有用于驱动储苗盘631升降的剪刀式升降结构633。
更具体地,剪刀式升降结构633为铰接菱形多杆机构。
送苗、植树执行机构的主要功能是:在植树作业前存放容器苗(存苗),在植苗过程中向植树执行机构递送容器苗(取苗)。
通过送苗盘间歇送苗机构,将储存好的树苗运输至漏苗管632后进入植树执行机构,其能够将树苗准确、定点地投放入挖好的树坑中。
本实施方式中,剪刀式升降结构633用于实现储苗盘631及与出苗盘相连的部件的整体升降。剪刀式升降结构633升程大、稳定性好,无偏移,可使得漏苗管632在恰当时机将树苗放入挖好的树坑中,且能够很好地配合灌溉喷头638进行灌溉。
利用本发明的基于光伏供能的全自动植树机器人进行植树时,漏苗孔及其灌溉喷头638需要贴近树坑底部,通过步进电机对机构底部右侧的旋转头进行推动,由于旋转头固定安装在机构底部的右端,机构底部的左端旋转头与传动杆上端的支点铰接,所以传动杆下端两支点的间距增大,此时,铰接菱形多杆机构纵向收缩,使得漏苗孔及其灌溉喷头638下降;树苗投送完毕后,漏苗孔及其灌溉喷头638需要远离树坑底部,通过步进电机对机构底部右侧的旋转头进行推动,传动杆下端的两支点的间距减小,此时,铰接菱形多杆机构纵向伸长,使得漏苗孔及其灌溉喷头638上升。
根据本发明的具体实施方式,储苗盘631中设有多个苗杯634,相邻的苗杯634之间通过柔性带635相连,形成苗杯链,送苗、植树执行机构还包括用于控制多个苗杯634的移动轨迹的拨动轮636和被动轮637,拨动轮636为圆柱状,拨动轮636的外侧设有多个形状与苗杯634的外形相匹配的拨槽6361,拨动轮636还为苗杯634移动的提供动力。
更具体地,本发明中的苗杯链采用链式布置,即苗杯634在苗盘中呈蛇形盘绕,如图17示出的结构即为链式布置的具体形状。图中,储苗盘631为矩形,整个方块表示苗盘占用的空间,其中一个小方格为苗盘上一个单位的工作面积或安装面积,苗杯634所占用的区域用黑色方格表示,其它构件区域或空白区域用白色方格表示。图中共计有110个方格(5=110)其中黑色方格数目为58,白色方格数目为52,故链式储苗盘631空间利用率为52.73%。
图15为滑移式布置,左侧若干黑色方格代表紧密排列在滑轨上的苗杯634,右侧空白方格代表苗杯634滑移的剩余空间,滑轨式储苗盘631的空间利用率为50%。
图16为圆盘式布置,储苗盘631的苗杯634置于外侧圆环区域,中间大部分空间由传动机构占据,拐角部分为不可利用的安装空间。模型中共计有100个方格(5=100),其中黑色方格数目为40,白色方格数目为60,故圆盘式储苗盘631空间利用率为40%。
由上分析可得出结论,在相同空间下,本发明采用链式苗盘具有更高的空间占比,空间利用效率最高,采用链式苗杯布置方式是本发明的优选方案。
根据本发明的具体实施方式,拨动轮636为五个,被动轮637为两个,通过设于苗杯634的运动轨迹的转角处的拨动轮636和被动轮637,可确定苗杯634的运动轨迹。
具体实施时,拨动轮636旋转,给苗杯634移动的动力,使苗杯634沿蛇形运动轨迹移动。在承载盘上,开有一个直径与苗杯634内径相同的漏苗孔。拨动轮636由步进电机驱动并控制,每当拨动轮636转动一定角度,便拨动一个苗杯634移动到漏苗孔上方,苗杯634中的容器苗便因重力跌落入植树执行机构内,从而完成间歇送苗的过程。
更具体地,每个拨动轮636具有6个拨槽6361,两个拨槽6361直接具有1个拨齿,即具有6个拨齿。拨动轮636转动时,苗杯634与之啮合。拨动轮636每转过一个拨槽6361,苗杯634向出苗口6321移动一个位置。拨动轮636每转过60°,苗杯634与苗盘上的漏苗孔重合一次,用于形成间歇送苗机构。多个苗杯634沿蛇形运动轨迹排布。柔性带635为尼龙带。储苗盘631包括承载盘和围绕承载盘设置的侧围板,苗杯634设于承载盘上,承载盘上开设有与苗杯634内径相同的漏苗孔,漏苗孔与漏苗管632的上部连通,苗杯634为上下贯通的圆筒状。储苗盘631总长为0.85m、总宽为0.7m。苗盘上共有54个苗杯634,苗杯634为外径75mm、壁厚2mm、高120mm的圆柱形直筒,容器苗将放置于苗杯634中,每个苗杯634内仅存放1个容器幼苗。
根据本发明的具体实施方式,漏苗管632的下部环设有多个灌溉喷头638,灌溉喷头638与蓄水罐51相连通,漏苗管632的下部环还设有梯状铲。
根据本发明的具体实施方式,请重点参考图11-13,拢土夯实模块07包括压实部分和拢土部分,压实部分包括压土件10和用于驱动压土件10上下移动的压实动力件,拢土部分包括环绕压土件10设置的多块拢土板13;其中:拢土夯实模块07还包括:压实动力件、压实动力件、压实块护罩1、驱动块2、连接杆3、弹性件4、导向块5、底座6,连接件7、导板8,牵引件9、限位槽11、复位件14,其中,压实动力件为电机驱动曲柄滑块结构,利用压实动力件驱动上下移动,连接杆3固定于驱动块2的下部,压土件10固定于连接杆3的下部,导向块5为圆环状且环绕固定于连接杆3上部,弹性件4环绕于连接杆3的下部,导向块5和弹性件4全部收容于压实块护罩1内,连接杆3贯穿压实块护罩1设置,底座6固定于压实块护罩1的下部,底座6的周边设有多个连接件7,连接件7的数量与拢土板13的数量相同,每个连接件7的下方均设有一个牵引件9,牵引件9的一端与连接杆3相连,连接件7的另一端与导板8铰接,导板8的另一端与连接件7铰接,导板8内设有下部开口的导向腔,拢土板13的一端安装于导向腔的底部,复位件14设于拢土板13与导向腔的底部之间,拢土板13的另一端伸出导向腔。底座6的下部设有限位腔。
具体实施时,压实动力件包括压实电机和由压实电机驱动的曲柄滑块机构,曲柄滑块机构将电机的旋转动力转化为压土件10的上下滑动的动力,用于压实泥土。使用时,在树苗放置好后,由装置尾部底端的拢土部分收拢树坑周边的土壤,然后尾部的压实机构(曲柄滑块机构)对拢好的土进行压实操作。
具体说明如下:本实施方式中,驱动块2可为电机驱动的曲柄滑块结构中的滑块,或驱动块2与该滑块固定相连,在电机的驱动下,驱动块2上下移动,通过连接杆3把动力传递至压土件10,驱动压土件10上下反复压土,弹性件4起到缓冲及复位的作用,保证平稳顺畅下压,导向块5用于导向,压实块护罩1位于为包围活动件,起到安全防护作用。复位件14用于拢土板13复位。采用本实施方式的结构,可保证拢土夯实作业的效果,同时利于保证作业过程的平稳性。
下面具体对本发明的基于光伏供能的全自动植树机器人的传动系统及能量传递路径进行阐述。
本发明的基于光伏供能的全自动植树机器人采用的动力系统为液压系统。通过将液压泵、液压马达、液压缸压元件通过液压油管进行连接,并能实现特定动作要求。基本工作通过电动机驱动液压泵工作,然后液压泵再通过液压油管和控制阀液压油输送给液压马达和液压缸,最后液压马达和液压缸驱动负载作,如植树机行走、松土组件挖掘等。在植树机作业过程中,能量传递路线如图14所示。
在装置作业过程中,钻孔部件的姿态通过回转液压工作回路来微调,伸缩缸616伸缩时,可调整钻头612的角度,确保钻孔、犁地执行机构工作时相对地面垂直。回转液压工作回路包括伸缩缸616、三位六通阀、单向阀、溢流阀、液压泵和油箱。回路中液压油流动情况为:
进油路:液压泵一单向阀一三位六通阀一伸缩缸616。
回油路:伸缩缸616一三位六通阀一油箱。
需要说明的是,本实施方式的基于光伏供能的全自动植树机器人并非适用于所有树苗。具体对树苗移栽控制项目如下:
(1)树苗选择
树苗选择要坚持适合当地气候、土壤,同时要同调整农业产业结构相结合,适合农民增收相结合。根据西北地区的实际生态气候,为了解决水土流失、荒漠化等生态问题,达到植树造林的目的,优先选用抗旱抗逆性强、速生的优良杨树杂交种9。
(2)规格
选择根系完整无缺损、苗干通直二根二干(或三根二干)大苗,胸径1.5cm、苗高100cm以上无病虫害的健康苗木。
(3)树苗运输
从起苗到栽植一般要经过一段运输时间。这个期间一定要加强苗木运输管理,主要是保持苗木体内的水分不流失,不蒸发,需要对苗木进行保护和处理。苗木保护重点是保证苗木根系不劈裂,采取的主要措施有起苗前将苗木灌好水,要浇足浇透,起苗时避免伤害根系,确保根系完整;对起出后不能及时运走的苗木,要采取保水和遮盖等措施进行处理,苗木运输时对路途较远的要联系水源,适时进行补浇水或盖好篷布以免水分过度蒸发,对路途不远的地块造林也要用篷布遮盖。
(4)苗木处理
苗木运输到造林地块后,对根系较长者要适当修剪,然后用清水充分浸泡,浸泡苗木时间至少2-3d。在栽植之前,利用甲基托布津溶液(50%可湿性粉剂800-1000倍液)对苗木整株进行杀菌消毒处理,以防止生长期间发生病害。
(5)栽植方法
栽植株行距,栽植密度为1667株。在最后填土至地表再压实的过程中,需预留出10cm浇水围堰,以便日后灌溉。
综上可知,本发明的基于光伏供能的全自动植树机器人具有如下有效效果:
(1)采用太阳能光伏板对所有模块进行供能,无需外接动力源,节能减排。
(2)利用空气取水技术自主制水并灌溉,提高了栽种植被的存活率,降低生态修复成本。
(3)装置采用履带化行进作业方式,能够适应各种复杂的工作环境,适应性强。
(4)采用智能植树技术,栽苗速度提升,装置工作效率大大提高且进一步降低了人工工作强度及成本。
(5)巧妙采用多种机构(送苗盘间歇送苗机构、铰接菱形多杆机构、曲柄滑块机构)实现树苗栽种全过程,节能减排。
(6)拢土夯实模块07可替换不同直径中空管,自适应不同种类树苗的栽种,确保树苗与地面垂直且移栽稳固。
(7)装置结构简单、易维护、成本低、高效作业,利于生态环境修复,市场前景广阔。
本发明的基于光伏供能的全自动植树机器人有选择地在适宜的植树地点松土植树,这使其对土壤的破坏减少、能耗低,提高了苗木的生态适应性、机器的机动性、对不同地面、不同种类(尺寸)苗木的适应性和机械化程度,解放了劳动力,降低了劳动成本,大大提高了生态环境修复的效益。
上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其它实施方式。
- 一种光伏汇流箱的维护机器人
- 一种具有光伏供能的人工智能交通机器人
- 一种光伏机器人姿态控制方法及光伏机器人