一种物料转运机器人整理翻转装置
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及物料转运机器人,尤其是对物料进行整理和翻转的装置。
背景技术
物料转运机器人一般是将物料从一个地方转运到另一地方,现在有一种物料转运机器人主要包括机架、行走机构、升降机构和翻转夹持装置,行走机构安装机架上,升降机构安装在机架上,翻转夹持装置安装在升降机构上,通过翻转夹持装置夹持物料然后放置到升降机构的平台上,实现物料的转运,虽然这种结构能够实现转运,但是当物料被夹持到平台上后,如出现不整齐,则会给翻转、夹持的工序带来麻烦。
如在中国专利申请号为202111059063.0专利申请日为2021年9月10日公开日为2021年12月3日的专利文献中公开了木料搬运机器人及木料搬运作业方法,涉及机器人技术领域。木料搬运机器人,包括下部机架总成、上部机架总成、木料夹持总成和摄像头;下部机架总成包括下部机架和电动滚轮;上部机架总成包括上部机架和升降驱动机构;木料夹持总成包括平移驱动机构、夹持翻转机构和木料推出机构;三个摄像头分别固定安装在上部机架的前端及两侧,以获取上部机架前端及两侧的视野。木料搬运作业方法,应用于木料搬运机器人,包括夹取高位木料、木料高位卸载、拾取低位木料、木料低位卸载四种作业。本发明用于木料的自动化搬运和卸载作业,相比人工操作,极大减轻了工人的劳动强度,可实现四种作业,在大多数的使用场景中均可适用。但是,在该文献中公开了直落式卸载如下:a、两个气缸A同步启动,驱动滑架沿水平轨道向上部机架前端移动,使木料夹持区域伸入到卸载区域的卸载面的正上方;b、两个气缸B的活塞杆以第一速度持续同步缩回,使第一组木料从两个橡胶块之间掉落,第一组木料掉落后,即落在卸载区域的卸载面上(参见该文献说明书第0052段),这说明当木料落入到卸载面上后没有对木料进行对位整理,那么给后续的推料可能会带来麻烦。
另外,现有的物料转运机器人仅仅通过翻转夹持装置将物料夹持到物料机器人,其不能及时的将物料转运到另一位置造成不能及时的腾出空间。如在中国专利申请号为202210410192.8专利申请日为2022年04月19日公开日为2022年07月29日的专利文献中公开了垃圾容器转运机器人及方法,涉及自动化转运设备技术领域。垃圾容器转运机器人,包括可移动机架、机械抓手总成、搬运总成;可移动机架包括主体车架、电动滚轮和升降驱动组件;机械抓手总成包括云台电机、多自由度机械臂和机械爪;搬运总成包括底座、往复推送组件、上座、低位托盘、高位托盘和夹爪机构;搬运总成通过底座两侧的导向套滑动安装在两个竖向支架的导向杆上,并位于载物区间中。垃圾容器转运方法,基于垃圾容器转运机器人。本发明应用于居民小区,可代替人工倒垃圾至指定地点,解决了居民小区中特殊人群倒垃圾的不便。在转运垃圾容器的过程中,实现了包含拾取-转运-卸载的全流程自动化操作。同时还公开了如下步骤:
S01 夹紧垃圾容器。
S02 将垃圾容器转移至高位或地位托盘上。
S03转运垃圾容器。
S04将垃圾容器转移至卸载平面上。
S05投放垃圾。
上述结构和方法,当垃圾容器被转移到高位或地位托盘上时,如果没有及时的将垃圾容器从高位或地位托盘上转移走,则会占用后面的垃圾容器放入到高位或地位托盘上的空间,影响转运的效率。
发明内容
本发明的目的是提供一种物料转运机器人整理翻转装置,利用本发明的结构,能对夹持过来的物料进行夹持整理,便于后续工序的顺利进行,同时,能及时的将物料进行翻转转运,腾出空间,提高转运效率。
为达到上述目的,一种物料转运机器人整理翻转装置,包括机架、物料夹持整理机构和物料翻转机构。
物料夹持整理机构包括夹持座、夹持气缸、夹持臂和夹持杆;夹持座安装在机架的一端上,在夹持座的两端分别通过铰接轴铰接有夹持臂,铰接轴位于夹持臂的中部,夹持臂的下端开设有长条形驱动槽,夹持臂的上端伸出夹持座,在夹持座的上端安装有夹持杆;在夹持座的两端分别设有横向延伸的腰型槽,腰型槽穿过有驱动杆,同一端的驱动杆穿过对应端的长条形驱动槽;夹持气缸的缸体与一端的驱动杆连接,夹持气缸的活塞杆与另一端的驱动杆连接;在两夹持臂之间设有安装到夹持座上的承载平台。
物料翻转机构包括支撑架、驱动座、驱动、翻转架组件、第一翻转板和第二翻转板;支撑架安装在机架的另一端上,在支撑架上安装有驱动座,在驱动座上安装有驱动,在驱动的输出轴上连接有翻转架组件,翻转架组件包括翻转架,翻转架包括驱动部、第一连接部和第二连接部,驱动的输出轴带动驱动部旋转,第一连接部的一端连接在驱动部上,第二连接部的一端连接在驱动部上,第一连接部与第二连接部呈90°夹角;在第一连接部上安装有第一翻转板,在第二连接部上安装有第二翻转板;第一翻转板处于水平状态时,第一翻转位于承载平台的上方。
上述结构,当物料被放入到承载平台上后,启动夹持气缸,夹持气缸同步带动两端的驱动杆在腰型槽内滑动,驱动杆在长条形驱动槽的作用下带动夹持臂摆动,从而带动夹持杆同步相向或相反运动。当夹持气缸伸长时,则带动夹持杆相向运动,则能对承载平台上的物料进行夹持整理,如夹持气缸收缩,则带动夹持杆相反运动,释放出夹持杆之间的距离。因此,本发明的结构能对放置到承载平台上物料进行夹持整理,便于后续工序的进行。在本发明中,通过驱动杆驱动夹持臂摆动,其驱动的可靠性和稳定性更好。另外,通过驱动的输出轴带动翻转架旋转,让第一翻转板处于水平位置,即承载平台的上方,让第二翻转板处于垂直位置,当物料被放入到第一翻转板上时,通过承载平台承载,通过第二翻转板对物料的一侧边进行抵挡;然后启动驱动,驱动带动翻转架组件、第一翻转板和第二翻转板一同带动物料翻转90°,将物料从第一位置翻转到第二位置,这样,通过本发明的结构就能及时的将物料进行转移,为第一位置及时腾出空间,便于下一物料的及时放入,从而提高转运效率。由于设置了呈90°设置的第一翻转板和第二翻转板,这样,物料在被旋转的过程中,不容易脱离第一翻转板和第二翻转板,对物料的转运更加的可靠。
进一步的,在夹持座的底部设有导轨,在导轨的一端滑动的设有第一驱动座,在导轨的另一端设有第二驱动座,第一驱动座与夹持气缸的缸体连接,第一驱动座还与其中一驱动杆连接,第二驱动座与夹持气缸的活塞杆连接,第二驱动座还与另一驱动杆连接。该结构,利用导轨对第一驱动座和第二驱动座进行导向,让夹持气缸的工作更加的稳定。
进一步的,在承载平台上设有一组以上的滚轮组,每组滚轮组包括横向排列的两个滚轮,滚轮的轴线方向与夹持杆的夹持方向垂直,第一翻转板位于滚轮组的两个滚轮之间。通过设置滚轮,在将物料在承载平台上的滑动摩擦变换为滚动摩擦,减小对物料的磨损以及减少夹持气缸的耗能,并且第一翻转板位于每组滚轮组的两滚轮之间,因此,当第一翻转板位于承载板时,第一翻转板不会影响滚轮的作用。
进一步的,在承载平台上对应于滚轮的位置设有通槽,在承载平台上安装有安装座,在安装座上安装有销轴,在销轴上旋转的安装有滚轮,滚轮的顶端凸出承载平台的上表面。通过设置安装座则方便安装滚轮。
进一步的,第一翻转板包括第一连接板和连接在第一连接板上的第一支撑板,第一连接板连接在第一连接部上,第一支撑板伸出第一连接部;第二翻转板包括第二连接板和连接在第二连接板上的第二支撑板,第二连接板连接在第二连接部上,第二支撑板伸出第二连接部。通过设置第一连接板,则方便将第一翻转板连接到第一连接部上,通过设置第二连接板,则方便将第二翻转板连接到第二连接部上。
进一步的,在第一连接板上远离第一支撑板的一端设有凸出部,在第二连接板上远离第二支撑板的一端设有卡槽,凸出部卡入到卡槽内。这样,通过凸出部与卡槽的配合,能对第一翻转板和第二翻转板进行定位。
进一步的,在第一翻转板上设有第一避让槽,在第一连接部上铰接有第一滚轮,第一滚轮经第一避让槽凸出第一翻转板;在第二翻转板上设有第二避让槽,在第二连接部上铰接有第二滚轮,第二滚轮经第二避让槽凸出第二翻转板。该结构,在取放物料时,避免物料与第一翻转板或第二翻转进行滑动摩擦,能够更加容易的取放物料。
进一步的,翻转架组件还包括转轴、驱动环和压环,在驱动的输出轴上设有安装孔,转轴的一端伸入到安装孔内,转轴的另一端通过轴承安装在支撑架上;在驱动部靠近驱动的一端设有容置腔,在容置腔内设有一个以上驱动环,驱动环与驱动部连接,驱动环具有内孔,内孔设有与驱动的输出轴的缺口配合的平面;压环安装在远离驱动一端的驱动部端面上。该结构,将驱动的输出轴的扭力作用到驱动环上,而并非直接作用到驱动部上,能更好的保护翻转架组件,并压板和驱动环共同压制驱动部,对驱动部的固定更加的可靠。
进一步的,在驱动部的中部设有避让槽,在转轴上设有位于避让槽内的支撑环,支撑环与转轴为过盈配合;驱动部与转轴为间隙配合。该结构,在驱动部的中部设置支撑环,支撑环与驱动部连接,驱动环与转轴为转动连接,驱动部与转轴为间隙配合,这样,通过支撑环对驱动部进行进一步支撑,让转轴不与驱动部进行直接接触,一方面,能提高对驱动部的支撑可靠性,另一方面能减少驱动部的摩擦。
进一步的,在驱动的输出轴上位于驱动环与驱动之间设有第一平面轴承;在转轴上位于支撑架与压环之间套有第二平面轴承。这样能减少摩擦。
附图说明
图1为物料机器人的结构示意图。
图2为物料夹持整理机构和物料翻转机构的立体图。
图3为机架的立体图。
图4为机架另一视角的立体图。
图5为物料夹持整理机构的立体图。
图6为物料夹持整理机构的另一视角立体图。
图7为物料夹持整理机构的第三视角的立体图。
图8为物料夹持整理机构的分解图。
图9为第一驱动座的示意图。
图10为第二驱动座的示意图。
图11为去掉承载平台后物料夹持整理机构的示意图。
图12为物料翻转机构的立体图。
图13为物料翻转机构另一视角的立体图。
图14为物料翻转机构的分解图。
图15为物料翻转机构另一视角的立体图。
图16为物料翻转机构的俯视图。
图17为图16中A-A剖视图。
图18为物料夹持整理机构和物料翻转机构且第一翻转板处于水平状态的示意图。
图19为物料落入到第一翻转板的示意图。
图20为物料翻转机构带动物料翻转90°后的示意图。
具体实施方式
下面结合附图和具体实施方式对本发明进行进一步详细说明。
如图1所示,物料转运机器人包括底盘机架100、行走机构200、升降装置300、物料夹持整理机构400、物料翻转机构500和平移式翻转夹持装置600。行走机构200安装在底盘机架100的底部,升降装置300安装在底盘机架100上,物料夹持整理机构400和物料翻转机构500安装在机架700上,机架700与升降装置300之间安装有二级升降机构,平移式翻转夹持装置600安装在升降装置300上。该物料机器人的工作原理是:通过行走机构200带动整个物料机器人移动,当物料机器人移动到需要的位置时,通过平移式翻转夹持装置600夹持物料并翻转后放置到物料夹持整理机构艾400上,然后通过物料翻转机构500将物料转移到物料夹持整理机构400的一侧,实现对物料的转移。
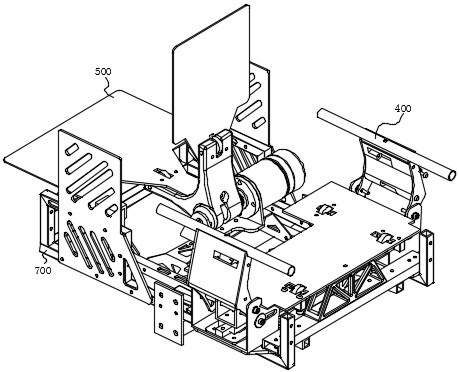
如图2所示,物料转运机器人整理翻转装置包括机架700、物料夹持整理机构400和物料翻转机构500。物料夹持整理机构400设置在机架700的一端,物料翻转机构500安装在机架700的另一端。
如图3和图4所示,所述的机架700包括纵梁71a、横梁72a、连接梁73a、侧架74a和夹持支撑梁75a。纵梁71a设置有两根,横梁72a设置有两根,两纵梁71a相互平行设置,在两纵梁71a的一端连接有一横梁72a,在两纵梁71a靠近横梁的一端分别连接有侧架74a,在两侧架的上端靠近一横梁的一侧连接有另一横梁72a,在两纵梁的另一端连接有连接梁73a,在连接梁73a上位于两纵梁之间连接有两平行设置的夹持支撑梁75a,在同一侧的夹持支撑梁75a与纵梁71a之间连接有连接块(图中未示出);在侧架的外侧连接有限位板70a,两限位板之间形成限位空间。
如图5至图8所示,物料夹持整理机构400包括夹持座1、夹持气缸2、夹持臂3、夹持杆4和承载平台5。
所述的夹持座1包括安装板11、夹持座体12和连接板13,安装板11和夹持座体12分别设置有两个。两安装板11分别位于连接板13的两端,安装板11安装在二级升降架700上;在安装板11上固定有夹持座体12,夹持座体12呈U形,在夹持座体12上设有横向延伸的腰型槽121,在夹持座体12的上端内侧设有台阶面形成支撑面122,在其中一夹持座体12上位于支撑面的外侧设有卡槽123,在夹持座体12上位于腰型槽121的上方设有铰接孔124。
连接板13的两端分别固定在两夹持座体12上,在相同的一端,连接板13、夹持座体12和安装板11通过螺栓连接。
在连接板13上通过螺钉固定有横向延伸的导轨6;在导轨6的两端分别滑动的设有第一驱动座7和第二驱动座8。
如图8和图9所示,第一驱动座7包括第一底板71、第一侧板72、第一连接板73和第一支撑板74。第一底板71的底部具有第一滑块75,第一滑块75滑动的设置在导轨6上,第一侧板72自第一底板71的一侧向上延伸,第一连接板73自第一侧板72的上端向第一底板的方向水平延伸,第一连接板73与第一底板71平行,第一支撑板74自第一底板71的另一侧向上延伸,第一连接板73与第一支撑板74错位设置,在第一连接板73上设有第一安装孔731,在第一侧板72和第一支撑板74上分别设有同轴的第一铰接孔76。
如图8和图10所示,第二驱动座8包括第二底板81、第二连接板82和第二支撑板83。在第二底板81的底部具有第二滑块84,第二滑块84滑动的设置在导轨6上;第二连接板82自第二底板81的一端向上延伸,在第二底板81的另一端的两侧分别向上延伸有第二支撑板83,在第二连接板82上设有第二安装孔821,在第二支撑板83上设有第二铰接孔831。
如图7、图8和图11所示,夹持气缸2的缸体的一端21为扁平状,夹持气缸2的缸体的一端21伸入到第一底板71与第一连接板73之间,螺栓22从上到下依次穿过第一安装孔731和夹持气缸的缸体的一端21,在夹持气缸的缸体的一端21的下方安装有与螺栓22螺纹连接的螺母23,实现第一驱动座7与夹持气缸缸体的连接。夹持气缸2的活塞杆上安装有抵挡螺母24,夹持气缸2的活塞杆穿过第二安装孔821,通过螺纹连接在夹持气缸活塞杆上的锁紧螺母25与抵挡螺母的夹持将夹持气缸活塞杆安装到第二驱动座8上。
如图5至图8所示,夹持臂3包括下夹持臂31和上夹持臂32,下夹持臂31包括两相对设置的下夹持板311,两下夹持板311之间有间距;上夹持臂32包括两个相对设置的上夹持板321和连接在两上夹持板321之间的夹持块322,在同一侧,下夹持板311和上夹持板321连接在一起为整体结构;上夹持臂32与下夹持臂31之间形成角度α,其中140°≤α≤180°,在本实例中,优选120°,上夹持臂32相对于下夹持臂31向内侧延伸。在下夹持臂31的下端设有长条形驱动槽312,长条形驱动槽312的长度方向与腰型槽121的长度方向具有夹角;在下夹持臂31上位于长条形驱动槽312的上方即夹持臂的中部设有铰接孔313,在本发明中,夹持臂的中部是指夹持臂两端之间的任一位置。两下夹持板位于U形夹持座体的U形槽内,位于一端的两下夹持板位于第一驱动座的外侧,位于另一端的两下夹持座位于第二驱动座的外侧。
位于第一驱动座7的一端对应夹持座体的腰型槽121、下夹持臂31的长条形驱动槽312和第一铰接孔76穿过有驱动杆9;位于第二驱动座8的一端对应夹持座体的腰型槽121、下夹持臂31的长条形驱动槽312和第二铰接孔831穿过有驱动杆9。
所述的驱动杆9包括驱动杆体91、垫片92和驱动锁紧螺栓93,在驱动杆体91的两端分别安装有驱动锁紧螺栓93,在驱动锁紧螺栓93上位于夹持座体的外侧套有垫片92,这样,方便安装和拆卸驱动杆9。
在夹持座体的铰接孔124与夹持臂的铰接孔313之间穿过有铰接轴90,铰接轴90由铰接螺栓、铰接垫、铰接弹性垫和铰接螺母组成,铰接螺栓穿过夹持座体的铰接孔124和夹持臂的铰接孔313,在夹持臂的铰接孔313的内侧螺纹连接铰接螺母,在铰接螺栓上位于夹持座体的铰接孔124外侧和铰接螺栓的螺栓头之间从内到外依次套有铰接垫和铰接弹性垫。
在夹持臂3的上端设有圆弧槽30,在圆弧槽30上卡入有夹持杆4,夹持杆4通过螺栓与夹持臂3连接。
在两夹持臂之间通过支撑面122支撑有承载平台5,承载平台5的一端开有与卡槽123数量一致的卡入槽51,卡入槽51与卡槽123对应将承载平台5的一端卡入到卡槽123内,这样,承载平台5不容易脱离。
在承载平台5的底部通过螺栓安装有安装座52,在安装座52上安装有销轴53,在销轴53上旋转的安装有滚轮54,两滚轮组成一组滚轮组,同一滚轮组在横向上排列,在承载平台5上对应于滚轮的位置设有通槽55,滚轮54的顶端通过通槽55凸出承载平台的上表面。滚轮54的轴线方向与夹持杆的夹持方向垂直。
如图12至图17所示,物料夹持装置400包括支撑架1a、驱动座2a、驱动3a、翻转架组件4a、第一翻转板5a和第二翻转板6a。
如图12至图17所示,支撑架1a包括支撑横板11a和支撑立板12a,在支撑横板11a的两端分别具有支撑立板12a。支撑立板12a安装在夹持支撑梁75a上。
所述的驱动座2a包括驱动横板21a和驱动立板22a,在驱动横板21a的两端分别连接有向上延伸的驱动立板22a。驱动横板21a通过螺栓连接在支撑横板11a上。
所述的驱动3a为电机,电机包括电机本体31a、定位环32a和固定环33a,定位环32a固定在电机上且套设在电机的输出轴上,输出轴能相对于定位环32a旋转,固定环33a套在输出轴上且远离电机本体31a设置,固定环33a能相对于输出轴旋转,电机本体31a的一端固定在其中一驱动立板上,定位环32a安装在其中一驱动立板的的安装孔221a上,固定环33a向内凸出其中一驱动立板。输出轴具有缺口34a。在驱动的输出轴上设有安装孔36a。
翻转架4a包括驱动部41a、第一连接部42a和第二连接部43a。
第一连接部42a的一端连接在驱动部41a上,第二连接部43a的一端连接在驱动部41a上,第一连接部42a与第二连接部43a呈90°夹角。驱动部41a具有通孔411a,通孔411a靠近驱动的一端的直径大于远离驱动一端的直径,在驱动部41a的中部设有避让槽412a,在驱动部41a靠近驱动的一端设有容置腔413a,在驱动部41a远离驱动的一端设有腔体414a。
在第一连接部42a和第二连接部43a的两侧靠近驱动部41a的一端设有抵挡边44a。在第一连接部42a的自由端设有第一安装槽421a,在第二连接部43a的自由端设有第二安装槽431a。
在第一连接部42a上位于第一安装槽421a处通过铰接轴铰接有第一滚轮91a。在第二连接部43a上位于第二安装槽431a处通过铰接轴铰接有第二滚轮92a。
在容置腔413a内设置有依次设置的驱动环81a,驱动环81a设有内孔811a,内孔811a设有与驱动的输出轴的缺口配合的平面812a。输出轴穿过驱动环81a伸入到通孔411a内,输出轴与通孔411a有间隙,驱动环通过螺栓固定在驱动部41a上。在腔体414a内通过螺栓安装到驱动部41a上的压环82a。在避让槽内设有支撑环83a,支撑环83a通过螺栓固定在驱动部41a上,支撑环83a与转轴84a为过盈配合。
转轴84a的一端伸入到安装孔35s内,在转轴84a的一端与输出轴之间通过径向延伸的螺栓固定,转轴84a的另一端依次穿过驱动环81a、通孔的部分、支撑环83a、通孔的另一部分然后通过轴承85a安装在支撑架的另一支撑立板上。转轴与通孔有间隙,当转轴84a旋转时,不会直接与驱动部41a接触从而能更好的保护驱动部41a。上述结构,当电机工作时,电机的输出轴带动驱动环81a旋转,同时支撑环83a支撑住驱动部41a,这样,输出轴通过驱动环带动翻转架4a旋转,从而带动第一翻板和第二翻板旋转。
在驱动的输出轴上位于驱动环81a与固定环33a之间设有第一平面轴承86a。该结构,能减少驱动与驱动环之间的滑动磨损。在转轴上位于驱动立板22a与压环82s之间套有第二平面轴承87a。该结构,能减少支撑架与压环之间的滑动磨损。
第一翻转板5a包括第一连接板51a和连接在第一连接板51a上的第一支撑板52a,第一连接板51a通过螺栓连接在第一连接部42a上,并通过两抵挡边进行限位,第一支撑板52a伸出第一连接部42a,在第一翻转板5a上设有第一避让槽53a,第一滚轮91a经第一避让槽53a凸出第一翻转板,在第一连接板51a远离第一支撑板52a一端设有凸出部54a,第一支撑板52a处于水平面上时位于滚轮组的两滚轮之间,滚轮的最高点高于第一支撑板的上平面。第二翻转板6a包括第二连接板61s和连接在第二连接板61a上的第二支撑板62a,第二连接板61a通过螺栓连接在第二连接部61a上,并通过两抵挡边进行限位,第二支撑板62a伸出第二连接部61a,在第二翻转板6a上设有第二避让槽63a,第二滚轮92a经第二避让槽63a凸出第二翻转板,在第二连接板61a远离第二支撑板62a一端设有卡槽64a,凸出部54a卡入到卡槽64a内实现第一翻转板与第二翻转的相互定位。
第二支撑板的宽度大于第一支撑板的宽度,该结构的设计,让第一支撑板能够位于承载平台的两横向导向轮之间,便于承载放置的物料;通过设置较宽的第二支撑板,则对物料的支撑更加的可靠,让物料的转移更加的稳定。
在本实例中,通过驱动3a的输出轴带动翻转架4a旋转,如图18所示,让第一翻转板5a处于水平位置,让第二翻转板6a处于垂直位置。
如图19所示,当第一翻转板5a处于水平状态后,将物料1000放入到承载平台5上,此时物料1000给滚轮支撑,第一翻转板位于物料1000的下方,启动夹持气缸2,夹持气缸2同步带动第一驱动座7和第二驱动座8同步沿着导轨6运动,第一驱动座7和第二驱动座8分别带动驱动杆9在腰型槽121内滑动,驱动杆9在长条形驱动槽312的作用下带动夹持臂3摆动,从而带动夹持杆4同步相向或相反运动。当夹持气缸2伸长时,则带动夹持杆4相向运动,则能对承载平台5上的物料1000进行夹持整理,如夹持气缸2收缩,则带动夹持杆4相反运动,释放出夹持杆之间的距离。
物料1000被夹持整理好后,启动驱动3a,驱动3a带动翻转架组件4a、第一翻转板5a和第二翻转板6a一同带动物料翻转90°,如图20所示,将物料1000从第一位置10a翻转到第二位置20a,
因此,本发明的结构能对放置到承载平台上物料进行夹持整理,便于后续工序如翻转的进行。在本发明中,通过驱动杆驱动夹持臂摆动,其驱动的可靠性和稳定性更好。通过本发明的结构就能及时的将物料进行转移,为第一位置及时腾出空间,便于下一物料的及时放入,从而提高转运效率。由于设置了呈90°设置的第一翻转板和第二翻转板,这样,物料在被旋转的过程中,不容易脱离第一翻转板和第二翻转板,对物料的转运更加的可靠。
- 一种适用于洁净环境的物料接驳转运装置
- 翻转运输机构及翻转运输装置
- 一种物料抓取装置及物料转运机器人
- 一种物料抓取装置及物料转运机器人