一种用于膝关节置换手术的引导定位设备
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及膝关节置换手术的引导定位设备应用技术领域,具体为一种用于膝关节置换手术的引导定位设备。
背景技术
人工膝关节置换是在近代人工髋关节成功应用于病人后逐渐发展起来的一种治疗膝关节疾病的新技术,它能非常有效地根除晚期膝关节病痛,极大地提高病人的生活质量,并且,在对病人进行膝关节置换手术时通常使用引导定位设备帮助医生完成手术过程。
现有的膝关节置换手术的引导定位设备在使用时仍然存在着很大的缺陷,现有的引导定位设备在对病人膝关节进行引导定位时往往需要人为使用定位设备对病人膝关节进行定位,费时费力,影响病人膝关节置换手术的效率,现有的引导定位设备灵活性较低,不能对病人膝关节不同位置及角度进行精准的定位,不利于医生观察病人膝关节的全貌,进而不利于病人膝关节置换手术的进行,现有的引导定位设备对病人膝关节引导定位的自动化程度较低,并且在对病人膝关节进行多方定位时,需要人为的调节病人的腿部位置,导致对病人膝关节引导定位的效率较低。
发明内容
本发明的目的就在于为了解决现有的引导定位设备在对病人膝关节进行引导定位时往往需要人为使用定位设备对病人膝关节进行定位,费时费力,影响病人膝关节置换手术的效率;现有的引导定位设备灵活性较低,不能对病人膝关节不同位置及角度进行精准的定位,不利于医生观察病人膝关节的全貌,进而不利于病人膝关节置换手术的进行;现有的引导定位设备对病人膝关节引导定位的自动化程度较低,并且在对病人膝关节进行多方定位时,需要人为的调节病人的腿部位置,导致对病人膝关节引导定位的效率较低。问题,而提出一种用于膝关节置换手术的引导定位设备。
本发明的目的可以通过以下技术方案实现:一种用于膝关节置换手术的引导定位设备,包括前进模块、旋转模块、推进模块、移动模块、升降模块、夹紧模块和定位模块,所述前进模块上设置有基座,所述旋转模块底部设置在基座顶部,所述旋转模块顶部设置有转板,所述推进模块底部设置在转板的顶部,所述移动模块设置在推进模块的顶部,所述移动模块一侧设置有移板,所述升降模块设置在移板一侧,所述升降模块一侧设置有固定板,所述移动模块两侧均设置有支撑座,所述夹紧模块设置在固定板底部的一端,所述定位模块设底部设置在固定板顶部的一端,所述定位模块一侧设置有限位板。
优选的,基座中部中空,基座中部一侧安装有第一电机,且基座中部设置有配重块,基座两侧的两端均设置有驱动轮,第一电机通过转轴与基座两侧的其中两个驱动轮活动连接。
优选的,旋转模块底部安装有第二电机,第二电机顶端通过转轴活动连接有支撑杆,支撑杆底端焊接在转板的底端中部,转板呈长方体型结构。
优选的,推进模块底部设置有支架,支架呈“U”型结构,且支架焊接在转板的顶部,支架一端安装有第三电机,第三电机一端通过转轴活动连接有第一丝杆,支架顶部两侧均焊接有第一滑轨,两个第一滑轨顶部均连接有第一滑块,两个支撑座分别焊接在两个第一滑块的顶部,且其中一个第一滑块一侧焊接有第一支撑板,第一支撑板一侧焊接有第二滑块,第二滑块中部开设有与第一丝杆相适配的第一螺孔,第一丝杆通过第一螺孔与第二滑块连接。
优选的,两个支撑座之间焊接有第二支撑板,第二支撑板呈长方体型结构,其中一个支撑座一侧安装有第四电机,第四电机一端通过转轴活动连接有第二丝杆,移板一侧焊接有第四滑块,第四滑块中部开设有与第二丝杆相适配的第二螺孔,第二丝杆通过第二螺孔与第四滑块连接,第二支撑板一侧的上下两端均焊接有第二滑轨,两个第二滑轨上均连接有第三滑块,两个第三滑块均与移板焊接,两个第二滑轨与第二丝杆之间平行。
优选的,升降模块一侧设置有第三支撑板,第三支撑板呈长方体型结构,第三支撑板与移板焊接,第三支撑板顶端中部安装有第五电机,第五电机底端通过转轴活动连接有第三丝杆,第三丝杆两侧均设置有第三滑轨,且两个第三滑轨与第三丝杆之间平行,两个第三滑轨均与第三支撑板焊接,两个第三滑轨上均连接有第五滑块,两个第五滑块一侧焊接有滑板,滑板呈长方体型结构,滑板一侧中部焊接有第六滑块,第六滑块中部开设有与第三丝杆相适配的第三螺孔,第三丝杆通过第三螺孔与第六滑块连接,滑板一侧焊接有连接杆,连接杆底部与固定板顶部一端焊接。
优选的,夹紧模块顶部安装有第六电机,第六电机底部通过转轴活动连接有第一电缸,第一电缸底部设置有挡板,挡板底部设置有气动夹持器。
优选的,定位模块一侧底部设置有底座,底座与固定板焊接,底座一侧铰接有液压缸,液压缸一端连接有液压杆,液压杆顶部铰接有翻板,底座顶部一侧焊接有夹板,翻板通过滚轴与夹板中部连接。
优选的,翻板顶部一端的顶部安装有第七电机,第七电机底部通过转轴活动连接有第二电缸,第二电缸底部与限位板顶部一侧连接,且限位板一侧开设有观察口。
一种用于膝关节置换手术的引导定位设备,该引导定位设备的使用方法具体包括以下步骤:
步骤一:开启前进模块上的第一电机,第一电机带动基座两侧的驱动轮转动,将该引导定位设备运动至病人脚底一侧,同时,开启旋转模块上的第二电机,第二电机带动支撑杆转动,支撑杆带动转板转动,调节夹紧模块和定位模块的角度,将夹紧模块和定位模块运动至病人的腿部上方;
步骤二:开启推进模块上的第三电机,第三电机带动和第一丝杆转动,第一丝杆通过第二滑块带动第一支撑板前后运动,第一支撑板带动第一滑块前后运动,调节移动模块的在病人腿部上方的前后位置,其次,配合开启移动模块上的第四电机,第四电机带动第二丝杆转动,第二丝杆带动第四滑块左右运动,第四滑块带动移板左右运动,将升降模块上的夹紧模块和定位模块运动至病人腿部的正上方,同时,开启升降模块上的第五电机,第五电机带动第三丝杆上下运动,第三丝杆通过带动第六滑块调节滑板的高度,进而调节连接杆底部固定板的高度,将夹紧模块和定位模块靠近病人的腿部;
步骤三:开启夹紧模块上第六电机,第六电机带动第一电缸转动,调节挡板底部气动夹持器的角度,其次,通过第一电缸调节气动夹持器的高度,气动夹持器对病人小腿部位进行夹紧固定,同时,通过定位模块上的液压缸带动液压杆运动,液压杆带动翻板运动,调节限位板的倾斜角度,同时配合开启翻板上的第七电机,第七电机带动第二电缸的限位板转动,调节限位板上的观察口至病人膝关节指定位置,第二电缸将限位板运动至距离病人膝关节指定高度,医生通过限位板上的观察口观察病人膝关节的情况并进行置换手术。
与现有技术相比,本发明的效果是:
1、由于病人身体状态不同,通过开启夹紧模块上第六电机,第六电机带动第一电缸转动,调节挡板底部气动夹持器的角度,方便气动夹持器对病人小腿部位的不同位置进行夹紧作业,其次,通过第一电缸调节气动夹持器的高度,方便气动夹持器靠近病人腿部进行夹紧作业,同时,便于适当的调节病人腿部的高度,调节膝关节的角度,便于医生对病人膝关节不同位置进行手术观察,同时,通过定位模块上的液压缸带动液压杆运动,液压杆带动翻板运动,便于调节限位板的倾斜角度,进而将观察口移动至病人膝关节的位置,对病人膝关节手术刀口的不同角度进行定位,同时配合开启翻板上的第七电机,第七电机带动第二电缸的限位板转动,调节限位板上的观察口至病人膝关节指定位置,第二电缸将限位板运动至距离病人膝关节指定高度,医生通过限位板上的观察口观察病人膝关节的情况并进行精确的膝关节置换手术,同时,通过夹紧模块与定位模块之间相互配合工作,使得病人腿部更加的稳定,从而保证了定位模块上的限位板对病人膝关节手术部位定位的更加稳固准确,有利于帮助医生更加集中的观察病人膝关节的情况,从而有利于医生对病人更好的进行膝关节置换手术,并且通过该定位引导设备对病人膝关节进行引导定位作业,极大程度上节省了人力引导定位的时间和定位效率。
2、通过开启推进模块上的第三电机,第三电机带动和第一丝杆转动,第一丝杆通过第二滑块带动第一支撑板前后运动,第一支撑板带动第一滑块前后运动,针对不同身高的患者,便于调节移动模块的在病人腿部上方的前后位置,从而有利于将夹紧模块和定位模块运动至病人膝关节上方,进而有利于定位模块对病人膝关节进行定位,不仅方便引导医生完成对患者的膝关节置换手术,还是得该引导定位设备对病人膝关节定位引导作业的适配范围更广,其次,通过配合开启移动模块上的第四电机,第四电机带动第二丝杆转动,第二丝杆带动第四滑块左右运动,第四滑块带动移板左右运动,不仅便于将升降模块上的夹紧模块和定位模块运动至病人腿部的正上方病人患者小腿部位进行夹紧和对病人膝关节进行定位作业,还有利于通过移动模块调节定位模块的左右位置,便于定位模块对床上左右位置患者的膝关节进行定位作业,同时,配合开启升降模块上的第五电机,第五电机带动第三丝杆上下运动,第三丝杆通过带动第六滑块调节滑板的高度,进而调节连接杆底部固定板的高度,针对于位置不同高度的位置的病人,便于将夹紧模块和定位模块靠近病人的腿部并对病人膝关节进行定位作业,提高了该引导定位设备在使用时的灵活性。
3、通过开启旋转模块上的第二电机、推进模块上的第三电机、移动模块上的第四电机和升降模块的第五电机,调节夹紧模块和定位模块的角度、前后位置、左右位置和上下位置,使得夹紧模块和定位模块运动的区域更广,一方面,不仅方便夹紧模块对不同位置的病人小腿部位进行夹紧固定作业,还有利于调节病人小腿部位的角度和位置,从而方便定位模块上的限位板对患者膝关节的不同位置进行定位引导作业,进而方便医生通过限位板上的观察口实时观察手术的进行,有利于医生通过观察口对病人膝关节不同位置进行精准的定位作业,从而有利于该引导定位设备帮助医生更好的完成病人的膝关节置换手术,进一步的提高了医生完成病人膝关节置换术的效率,另一方面,通过旋转模块、推进模块、移动模块和升降模块与夹紧模块和定位模块之间相互配合工作,使得该定位引导设备的对病人膝关节部位定位作业的自动化程度更高,有利于该引导定位设备更好的帮助医生完成病人的膝关节置换手术。
4、通过开启前进模块上的第一电机,第一电机带动基座两侧的驱动轮转动,便于将该引导定位设备运动至病人脚底一侧,同时,方便将该引导定位设备移动至不同区域对病人膝关节手术部位进行进行定位,有助于医生通过该引导定位设备完胜病人的膝关节置换手术,通过开启旋转模块上的第二电机,第二电机带动支撑杆转动,支撑杆带动转板转动,调节夹紧模块和定位模块的角度,便于将夹紧模块和定位模块运动至病人的腿部上方,从而有利于夹紧模块对病人小腿部位进行夹紧,同时配合旋转模块、推进模块、移动模块和升降模块,便于夹紧模块将病人小腿部位调节至不同位置的角度,进一步的有利于定位模块对病人膝关节不同手术区域进行引导定位,从而有助于医生在手术过程中更好的观察病人膝关节手术的完成情况。
附图说明
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
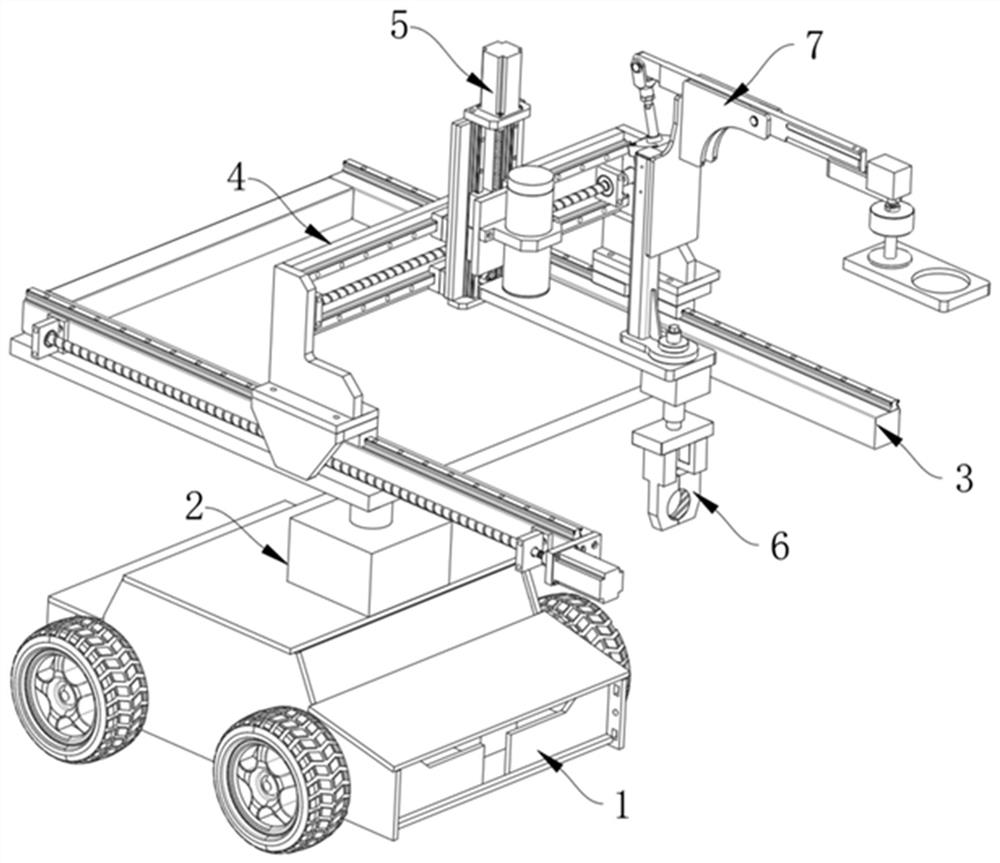
图1为本发明整体结构的示意图。
图2为本发明中的前进模块的结构示意图。
图3为本发明中的旋转模块的结构示意图。
图4为本发明中的推进模块的结构示意图
图5为本发明中的第一支撑板与第二滑块的连接正视图。
图6为本发明中的移动模块的结构示意图。
图7为本发明中的移板与第四滑块的连接侧视图。
图8为本发明中的升降模块的结构示意图。
图9为本发明中的滑板与第六滑块的连接俯视图。
图10为本发明中的夹紧模块的结构示意图。
图11为本发明中的定位模块的结构示意图。
图中:1、前进模块;101、基座;102、第一电机;103、驱动轮;2、旋转模块;201、第二电机;202、支撑杆;203、转板;3、推进模块;301、支架;302、第三电机;303、第一丝杆;304、第一支撑板;305、第一滑轨;306、第一滑块;307、第二滑块;4、移动模块;401、支撑座;402、第二支撑板;403、第四电机;404、第二丝杆;405、第二滑轨;406、第三滑块;407、移板;408、第四滑块;5、升降模块;501、第三支撑板;502、第五电机;503、第三丝杆;504、滑板;505、连接杆;506、固定板;507、第三滑轨;508、第五滑块;509、第六滑块;6、夹紧模块;601、第六电机;602、第一电缸;603、挡板;604、气动夹持器;7、定位模块;701、底座;702、液压缸;703、液压杆;704、翻板;705、夹板;706、第七电机;707、第二电缸;708、限位板;709、观察口。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-11所示,一种用于膝关节置换手术的引导定位设备,包括前进模块1、旋转模块2、推进模块3、移动模块4、升降模块5、夹紧模块6和定位模块7,前进模块1上设置有基座101,旋转模块2底部设置在基座101顶部,旋转模块2顶部设置有转板203,推进模块3底部设置在转板203的顶部,移动模块4设置在推进模块3的顶部,移动模块4一侧设置有移板407,升降模块5设置在移板407一侧,升降模块5一侧设置有固定板506,移动模块4两侧均设置有支撑座401,夹紧模块6设置在固定板506底部的一端,定位模块7设底部设置在固定板506顶部的一端,定位模块7一侧设置有限位板708。
限位板708底部一侧安装有红外线传感器(型号:INIR-ME 生产厂家:天津瑞利光电科技有限公司),基座101顶部一侧安装有PLC控制器(型号:SP-PDG 生产厂家:温州汉奈企业管理有限公),红外线传感器获取病人膝关节的位置,红外线传感器将获取的信息传递给PLC控制器,PLC控制器通过获取的信息控制旋转模块2、推进模块3、移动模块4和升降模块5,通过开启旋转模块2上的第二电机201、推进模块3上的第三电机302、移动模块4上的第四电机403和升降模块5的第五电机502,调节夹紧模块6和定位模块7的角度、前后位置、左右位置和上下位置,使得夹紧模块6和定位模块7运动的区域更广,一方面,不仅方便夹紧模块6对不同位置的病人小腿部位进行夹紧固定作业,还有利于调节病人小腿部位的角度和位置,从而方便定位模块7上的限位板708对患者膝关节的不同位置进行定位引导作业,进而方便医生通过限位板708上的观察口709实时观察手术的进行,有利于医生通过观察口709对病人膝关节不同位置进行精准的定位作业,从而有利于该引导定位设备帮助医生更好的完成病人的膝关节置换手术,进一步的提高了医生完成病人膝关节置换术的效率,另一方面,通过旋转模块2、推进模块3、移动模块4和升降模块5与夹紧模块6和定位模块7之间相互配合工作,使得该定位引导设备的对病人膝关节部位定位作业的自动化程度更高,有利于该引导定位设备更好的帮助医生完成病人的膝关节置换手术。
本发明实施例的一个可选实施方式中,基座101中部中空,基座101中部一侧安装有第一电机102,且基座101中部设置有配重块,基座101两侧的两端均设置有驱动轮103,第一电机102通过转轴与基座101两侧的其中两个驱动轮103活动连接,通过开启前进模块1上的第一电机102,第一电机102带动基座101两侧的驱动轮103转动,便于将该引导定位设备运动至病人脚底一侧,同时,方便将该引导定位设备移动至不同区域对病人膝关节手术部位进行进行定位,有助于医生通过该引导定位设备完胜病人的膝关节置换手术。
本发明实施例的一个可选实施方式中,旋转模块2底部安装有第二电机201,第二电机201顶端通过转轴活动连接有支撑杆202,支撑杆202底端焊接在转板203的底端中部,转板203呈长方体型结构,通过开启旋转模块2上的第二电机201,第二电机201带动支撑杆202转动,支撑杆202带动转板203转动,调节夹紧模块6和定位模块7的角度,便于将夹紧模块6和定位模块7运动至病人的腿部上方,从而有利于夹紧模块6对病人小腿部位进行夹紧,同时配合旋转模块2、推进模块3、移动模块4和升降模块5,便于夹紧模块6将病人小腿部位调节至不同位置的角度,进一步的有利于定位模块7对病人膝关节不同手术区域进行引导定位,从而有助于医生在手术过程中更好的观察病人膝关节手术的完成情况。
本发明实施例的一个可选实施方式中,推进模块3底部设置有支架301,支架301呈“U”型结构,且支架301焊接在转板203的顶部,支架301一端安装有第三电机302,第三电机302一端通过转轴活动连接有第一丝杆303,支架301顶部两侧均焊接有第一滑轨305,两个第一滑轨305顶部均连接有第一滑块306,两个支撑座401分别焊接在两个第一滑块306的顶部,且其中一个第一滑块306一侧焊接有第一支撑板304,第一支撑板304一侧焊接有第二滑块307,第二滑块307中部开设有与第一丝杆303相适配的第一螺孔,第一丝杆303通过第一螺孔与第二滑块307连接,通过开启推进模块3上的第三电机302,第三电机302带动和第一丝杆303转动,第一丝杆303通过第二滑块307带动第一支撑板304前后运动,第一支撑板304带动第一滑块306前后运动,针对不同身高的患者,便于调节移动模块4的在病人腿部上方的前后位置,从而有利于将夹紧模块6和定位模块7运动至病人膝关节上方,进而有利于定位模块7对病人膝关节进行定位,不仅方便引导医生完成对患者的膝关节置换手术,还是得该引导定位设备对病人膝关节定位引导作业的适配范围更广。
本发明实施例的一个可选实施方式中,两个支撑座401之间焊接有第二支撑板402,第二支撑板402呈长方体型结构,其中一个支撑座401一侧安装有第四电机403,第四电机403一端通过转轴活动连接有第二丝杆404,移板407一侧焊接有第四滑块408,第四滑块408中部开设有与第二丝杆404相适配的第二螺孔,第二丝杆404通过第二螺孔与第四滑块408连接,第二支撑板402一侧的上下两端均焊接有第二滑轨405,两个第二滑轨405上均连接有第三滑块406,两个第三滑块406均与移板407焊接,两个第二滑轨405与第二丝杆404之间平行,开启移动模块4上的第四电机403,第四电机403带动第二丝杆404转动,第二丝杆404带动第四滑块408左右运动,第四滑块408带动移板407左右运动,不仅便于将升降模块5上的夹紧模块6和定位模块7运动至病人腿部的正上方病人患者小腿部位进行夹紧和对病人膝关节进行定位作业,还有利于通过移动模块4调节定位模块7的左右位置,便于定位模块7对床上左右位置患者的膝关节进行定位作业。
本发明实施例的一个可选实施方式中,升降模块5一侧设置有第三支撑板501,第三支撑板501呈长方体型结构,第三支撑板501与移板407焊接,第三支撑板501顶端中部安装有第五电机502,第五电机502底端通过转轴活动连接有第三丝杆503,第三丝杆503两侧均设置有第三滑轨507,且两个第三滑轨507与第三丝杆503之间平行,两个第三滑轨507均与第三支撑板501焊接,两个第三滑轨507上均连接有第五滑块508,两个第五滑块508一侧焊接有滑板504,滑板504呈长方体型结构,滑板504一侧中部焊接有第六滑块509,第六滑块509中部开设有与第三丝杆503相适配的第三螺孔,第三丝杆503通过第三螺孔与第六滑块509连接,滑板504一侧焊接有连接杆505,连接杆505底部与固定板506顶部一端焊接,开启升降模块5上的第五电机502,第五电机502带动第三丝杆503上下运动,第三丝杆503通过带动第六滑块509调节滑板504的高度,进而调节连接杆505底部固定板506的高度,针对于位置不同高度的位置的病人,便于将夹紧模块6和定位模块7靠近病人的腿部并对病人膝关节进行定位作业,提高了该引导定位设备在使用时的灵活性。
本发明实施例的一个可选实施方式中,夹紧模块6顶部安装有第六电机601,第六电机601底部通过转轴活动连接有第一电缸602,第一电缸602底部设置有挡板603,挡板603底部设置有气动夹持器604(型号:PLE 50 50 生产厂家:青岛新犀杰商贸有限公司),通过开启夹紧模块6上第六电机601,第六电机601带动第一电缸602转动,调节挡板603底部气动夹持器604的角度,方便气动夹持器604对病人小腿部位的不同位置进行夹紧作业,其次,通过第一电缸602调节气动夹持器604的高度,方便气动夹持器604靠近病人腿部进行夹紧作业,同时,便于适当的调节病人腿部的高度,调节膝关节的角度,便于医生对病人膝关节不同位置进行手术观察。
本发明实施例的一个可选实施方式中,定位模块7一侧底部设置有底座701,底座701与固定板506焊接,底座701一侧铰接有液压缸702,液压缸702一端连接有液压杆703,液压杆703顶部铰接有翻板704,底座701顶部一侧焊接有夹板705,翻板704通过滚轴与夹板705中部连接,通过定位模块7上的液压缸702带动液压杆703运动,液压杆703带动翻板704运动,便于调节限位板708的倾斜角度,进而将观察口709移动至病人膝关节的位置,对病人膝关节手术刀口的不同角度进行定位。
本发明实施例的一个可选实施方式中,翻板704顶部一端的顶部安装有第七电机706,第七电机706底部通过转轴活动连接有第二电缸707,第二电缸707底部与限位板708顶部一侧连接,且限位板708一侧开设有观察口709,开启翻板704上的第七电机706,第七电机706带动第二电缸707的限位板708转动,调节限位板708上的观察口709至病人膝关节指定位置,第二电缸707将限位板708运动至距离病人膝关节指定高度,医生通过限位板708上的观察口709观察病人膝关节的情况并进行精确的膝关节置换手术,同时,通过夹紧模块6与定位模块7之间相互配合工作,使得病人腿部更加的稳定,从而保证了定位模块7上的限位板708对病人膝关节手术部位定位的更加稳固准确,有利于帮助医生更加集中的观察病人膝关节的情况,从而有利于医生对病人更好的进行膝关节置换手术。
在使用时,首先,通过开启前进模块1上的第一电机102,第一电机102带动基座101两侧的驱动轮103转动,便于将该引导定位设备运动至病人脚底一侧,同时,方便将该引导定位设备移动至不同区域对病人膝关节手术部位进行进行定位,有助于医生通过该引导定位设备完胜病人的膝关节置换手术,通过开启旋转模块2上的第二电机201,第二电机201带动支撑杆202转动,支撑杆202带动转板203转动,调节夹紧模块6和定位模块7的角度,便于将夹紧模块6和定位模块7运动至病人的腿部上方,从而有利于夹紧模块6对病人小腿部位进行夹紧,同时配合旋转模块2、推进模块3、移动模块4和升降模块5,便于夹紧模块6将病人小腿部位调节至不同位置的角度,进一步的有利于定位模块7对病人膝关节不同手术区域进行引导定位,从而有助于医生在手术过程中更好的观察病人膝关节手术的完成情况,并且通过该定位引导设备对病人膝关节进行引导定位作业,极大程度上节省了人力引导定位的时间和定位效率;
然后,通过开启推进模块3上的第三电机302,第三电机302带动和第一丝杆303转动,第一丝杆303通过第二滑块307带动第一支撑板304前后运动,第一支撑板304带动第一滑块306前后运动,针对不同身高的患者,便于调节移动模块4的在病人腿部上方的前后位置,从而有利于将夹紧模块6和定位模块7运动至病人膝关节上方,进而有利于定位模块7对病人膝关节进行定位,不仅方便引导医生完成对患者的膝关节置换手术,还是得该引导定位设备对病人膝关节定位引导作业的适配范围更广,其次,通过配合开启移动模块4上的第四电机403,第四电机403带动第二丝杆404转动,第二丝杆404带动第四滑块408左右运动,第四滑块408带动移板407左右运动,不仅便于将升降模块5上的夹紧模块6和定位模块7运动至病人腿部的正上方病人患者小腿部位进行夹紧和对病人膝关节进行定位作业,还有利于通过移动模块4调节定位模块7的左右位置,便于定位模块7对床上左右位置患者的膝关节进行定位作业,同时,配合开启升降模块5上的第五电机502,第五电机502带动第三丝杆503上下运动,第三丝杆503通过带动第六滑块509调节滑板504的高度,进而调节连接杆505底部固定板506的高度,针对于位置不同高度的位置的病人,便于将夹紧模块6和定位模块7靠近病人的腿部并对病人膝关节进行定位作业,通过开启旋转模块2上的第二电机201、推进模块3上的第三电机302、移动模块4上的第四电机403和升降模块5的第五电机502,调节夹紧模块6和定位模块7的角度、前后位置、左右位置和上下位置,使得夹紧模块6和定位模块7运动的区域更广,一方面,不仅方便夹紧模块6对不同位置的病人小腿部位进行夹紧固定作业,还有利于调节病人小腿部位的角度和位置,从而方便定位模块7上的限位板708对患者膝关节的不同位置进行定位引导作业,进而方便医生通过限位板708上的观察口709实时观察手术的进行,有利于医生通过观察口709对病人膝关节不同位置进行精准的定位作业,从而有利于该引导定位设备帮助医生更好的完成病人的膝关节置换手术,进一步的提高了医生完成病人膝关节置换术的效率,另一方面,通过旋转模块2、推进模块3、移动模块4和升降模块5与夹紧模块6和定位模块7之间相互配合工作,使得该定位引导设备的对病人膝关节部位定位作业的自动化程度更高,有利于该引导定位设备更好的帮助医生完成病人的膝关节置换手术;
最后,通过开启夹紧模块6上第六电机601,第六电机601带动第一电缸602转动,调节挡板603底部气动夹持器604的角度,方便气动夹持器604对病人小腿部位的不同位置进行夹紧作业,其次,通过第一电缸602调节气动夹持器604的高度,方便气动夹持器604靠近病人腿部进行夹紧作业,同时,便于适当的调节病人腿部的高度,调节膝关节的角度,便于医生对病人膝关节不同位置进行手术观察,同时,通过定位模块7上的液压缸702带动液压杆703运动,液压杆703带动翻板704运动,便于调节限位板708的倾斜角度,进而将观察口709移动至病人膝关节的位置,对病人膝关节手术刀口的不同角度进行定位,同时配合开启翻板704上的第七电机706,第七电机706带动第二电缸707的限位板708转动,调节限位板708上的观察口709至病人膝关节指定位置,第二电缸707将限位板708运动至距离病人膝关节指定高度,医生通过限位板708上的观察口709观察病人膝关节的情况并进行精确的膝关节置换手术,同时,通过夹紧模块6与定位模块7之间相互配合工作,使得病人腿部更加的稳定,从而保证了定位模块7上的限位板708对病人膝关节手术部位定位的更加稳固准确,有利于帮助医生更加集中的观察病人膝关节的情况,从而有利于医生对病人更好的进行膝关节置换手术。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种骨科临床用膝关节置换手术引导定位装置
- 一种用于双间室膝关节置换的外科手术辅助设备