烟叶采收机及利用其进行的烟叶采收方法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明属于烟叶采收技术领域,尤其涉及一种烟叶采收机及利用其进行的烟叶采收方法。
背景技术
我国种植烟叶的历史悠久,烟叶产业极大的推动了国民经济的发展,烟叶是我国国民经济中重要的一种经济作物,在烟叶生产过程中,采摘是基础性工作,及时、科学收获烟叶可以保证烟叶的品质。目前,我国绝大多数烟叶采收还是人工采集烟叶,需要消耗大量的人工和时间,并难以及时采摘。在烟叶收获量极大的情况下,人工采收已不能满足需要,而且容易错过最佳收获时间。加之近年来,烟区劳动力价格持续上涨,人工收烟成本持续上升,减工降本已成为实现烟叶生产持续稳定健康发展的迫切需求。同时,烟田环境比较恶劣,采摘烟叶劳动强度大,人工采摘烟叶的效率低,导致适熟期的烟叶无法按时完成收获,致使收获的烟叶质量下降,极大影响了烟农的经济收入,因此研发高效烟叶采摘机非常必要。
前,国内市场上也有少量的半自动化设备,但也需要人工采集然后机械输送的方式进行采收作业,虽然可以提高效率,降低劳动强度,但依旧需要投入较多人工。国外的大型自动化设备由于无法适应国内的烟叶品种以及种植农艺,烟叶收获破损率较高,对烟株伤害较大,而且成本较高,不能满足国内市场需求。
烟叶采摘机的核心部件是采摘机构,国内现有采摘机构采摘烟叶时存在着破损率较高、无法长时间连续作业和无法实现烟叶的分层采摘等问题。
现有技术文件(专利公开号为)公开了一种烟叶采收设备,其中,其采收烟叶的原理为:通过对烟株的拍打,实现烟叶的掉落,这种方式虽然可以实现烟叶的采收,但是不会对烟叶进行分层采摘,无疑会对烟株造成伤害,且烟叶破损率较高,大面积使用时会降低烟农的收益。
现有技术文件(专利公开号为2022108076338)公开了一种小型龙门履带式烟叶采收机,其利用星轮的转动可以实现卡住烟株的目的,随着星轮的升降将烟叶从烟株上折下来,这种方式实现了烟叶的分层采摘,也降低了人工强度,同时,从结构上可以看出其紧凑度较高,完全可以实现小型的目的。但是,在实施的过程中,其存在严重的问题,由于采收机一直处于行走状态,星轮卡住烟株的时候,相对烟株向下走的同时,也会相对于烟株有一个向前的速度,这就造成了烟株容易被折断的问题,同时,采摘的过程中,底层烟株采收时,烟株已经严重弯曲,采摘效果极差。
发明内容
本发明旨在提供一种结构简单、使用效果好的烟叶采收机及利用其进行的烟叶采收方法。
为解决上述技术问题,本发明提供了如下的技术方案:烟叶采收机,包括机架,机架上自上而下依次设置有采收器、传输部和收集箱;采收器包括两个相对设置的采收单元,两个采收单元之间预留有植株间隙,两个采收单元均包括设置于机架上的采收架,采收架上设有传动单元,传动单元自前之后向下倾斜设置,传动单元沿采收架的周向循环传动;传动单元上均匀分布有采摘杆,两个采收单元上的采摘杆相对设置;传输部往返循环传输在采收单元和收集箱之间。
传动单元包括传动电机和传动链条,传动电机带动传动链条循环传动,传动电机上方设有护板;传动链条上设有安装板,采摘杆固定连接在安装板上。
采收架外侧设有两个安装杆,两个安装杆沿采收架长度方向依次设置,安装杆安装于机架上;机架上设有L型板,L型板上设有通孔,安装杆穿设于通孔中;L型板上还设有顶丝,顶丝顶设于安装杆上。
传输部包括传送辊组,每个采收单元下方均设有1个传送辊组,两个传送辊组之间预留有通过间隙,通过间隙上设有沿通过间隙宽度方向设置的刷毛,刷毛端部连接在传送辊组,刷毛末端为自由端;传送辊组包括沿机架宽度方向设置的传送辊。
机架上设有转动电机,转动电机带动传送辊相对于机架转动;传送辊的转动方向为朝向机架外侧转动。
每个采收单元下方均设有一个拨轮,拨轮上连接有带动拨轮转动的防绕电机,拨轮位于传送辊组上方且拨轮设置于机架的后方。
两个采收单元前方均设有导向架,两个导向架内侧面自前至后逐渐靠近;机架底部设有驱动电机、行走轮和驱动轮,驱动电机驱动驱动轮转动;行走轮上设有测速传感器,测速传感器将采集到的速度信息传输到处理器,处理器输出信号控制传动电机输出轴的转动速度。
利用上述烟叶采收机进行的烟叶采收方法,所述方法依次包括如下步骤:
(1)机架行走,烟株进入到机架内的植株间隙中;
(2)机架向前方行走,传动链条朝向机架后下方传动;
(3)随着传动链条的传动,烟株进入到采摘杆围成的采摘框内;随着传动链条的传动,采摘框自上而下将烟株上的烟叶折下来;其中,同一个传动链条上相邻两个采摘杆之间的距离为P,P×cosα=D
(4)烟叶折下来后落入到传送辊上,传送辊转动,将烟叶送入到收集箱内。
机架行走的过程中,根据传动链条的传动速度调整机架的行走速度,具体实现方式为:传动链条的传动方向为朝向机架的后下方倾斜传动,其中,传动链条的传动线速度为V,则机架的行走速度为:Vcosα,其中α为传动链条相对于水平方向的倾斜角度。
传动链条的传动距离L为:L=Sn
通过以上技术方案,本发明的技术效果如下:1、本发明所述的采收机整个部件结构紧凑,在采摘同一个烟株的过程汇中,可以让采摘杆相对于烟株仅有竖直方向的作用力,从而避免了对烟株的弯折,竖直向下将烟叶拍掉,破损率低;2、本采收机安装拆卸方便,调整方便;3、本采收机可完成整株烟叶分层采摘作业,提高设备利用率,传统的分为中下部采摘器和顶部采摘器;4、本采收机可以实现行走速度与传动链条速度相匹配,保证了采收效果、同时采收效率高;5、纯电动的采摘部件可以更好的为以后无人化作业做铺垫。6、本发明所述的采收方法采收速度快,在采收过程中烟叶完整度高,不易出现主筋断裂的情况,同时可以根据烟株的直径对采摘杆进行调整。
附图说明
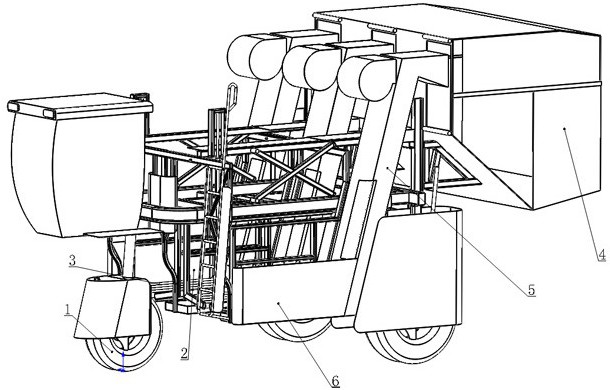
图1为为本发明结构示意图;
图2为采收单元立体图;
图3为采收单元主视图;
图4为采收单元俯视图;
图5为采收架立体图;
图6为采收架主视图;
图7为采收架俯视图;
图8为行走轮结构示意图;
图9为处理器电路原理图。
具体实施方式
烟叶采收机,如图1所示,包括机架7,机架7可以在烟田中自由行走,为了实现机架7在烟田中的行走,在机架7底部设置有行走轮1和驱动轮,行走轮1和驱动轮均转动设置于机架7上,为了实现驱动轮的转动,在机架7上设有驱动电机,驱动电机带动驱动轮的转动,随着驱动轮的转动,机架7行走,机架7行走的同时行走轮1也会行走。
为了对机架7的行走速度进行采集,在行走轮1上设有第一速度传感器,第一速度传感器的信号输出连接有处理器。第一速度传感器采集行走轮1的速度信息,并将采集到的速度信息传输到处理器中。
本实施例中使用的第一速度传感器为编码器23,编码器23装设于行走轮1上,装设方法如图8所示。当然,此处,编码器在行走轮1上的安装方法也可以采用现有技术的安装方式,此处编码器在行走轮上如何安装不属于本实施例的保护范围,不应在此处限定保护范围。
为实现采摘,在机架7上自上而下依次设置有采收器、传输部2和收集箱4。
在机架7上设有安装间隙3,采收器安装于安装间隙3内,采收器对烟叶进行采收,采收到的烟叶进入到传输部2,传输部2将烟叶传输到收集箱4中即可。
其中,采收器包括两个相对设置的采收单元,如图2~7所示,两个采收单元沿机架7宽度方向分布。
两个采收单元之间预留有植株间隙16,工作的时候,烟株从植株间隙16中通过。
两个采收单元包括均采收架,两个采收单元的采收架前方均设有导向架14。两个导向架14内侧面自前至后逐渐靠近。从而可以帮助烟株更好的进入到两个采收单元之间的植株间隙16内,实现烟叶的采收。
采收架上设有传动单元,传动单元自前至后向下倾斜设置,即传动单元前侧高,后侧低。本实施例中,对前后的定义方式为:机架7的移动方向为前,相反的方向为后。
同时,传动单元沿采收架周向循环传动。其中,两个传动单元均包括传动链条21和传动电机20,传动电机20的上方设有护板17,护板17用于对传动电机20进行保护。传动电机20带动传动链条21循环传动。
传动电机20带动传动链条21传动的实现方式为:在采收架上设有主动齿轮和从动齿轮,传动电机20带动主动齿轮转动;传动链条21在主动齿轮和从动齿轮之间循环传动。传动链条21循环传动的实现方式也为成熟的现有技术。
传动链条21上分布有采摘杆16,两个采收单元上的采摘杆16相对设置,即两个采收单元的采摘杆16端部相对,且两者之间预留的间隙为5~10mm,以保证能够将植株围在其中,实现对烟叶的弯折,采摘。
为实现采摘杆16的安装,在传动链条21上设有安装板24,采摘杆16固定连接在安装板24上。为提高采摘杆16的作用,安装板24上还设有两个均沿传动链条21长度方向设置的辅助杆22,两个辅助杆22分别位于采摘杆16的两侧。设置的辅助杆22可以保证传动链条21传动过程中的稳定性,同时,也可以提高采摘效果。
对于两个传动单元的传动链条21的传动方向限定如下:两个传动链条21位于植株间隙16内的部分均为朝向机架7斜后方传动。
工作的时候,随着机架7和传动链条21的移动,当采收器移动到植株处时,两个传动链条21上相对的两个采摘杆16为一组杆,两组相邻的杆可以将植株围在内侧;随着传动链条21的传动,两组相邻的杆相对于植株向下移动,从而将烟叶折下,实现烟叶采摘的目的。
此处,因为传动链条21为向斜下方传动,其可以分解为水平方向向后的运动和竖直方向上向下的运动,其中,竖直方向向下的运动实现对烟叶的采摘,而水平方向向后的运动用于抵消机架7水平方向的移动,进而使得采摘杆16相对于植株仅有向下的运动,不会出现对弯折植株的现象,极大提高了采摘效果,另外保证了采摘后植株的正常生长,更重要的是:由于机架7不会受到植株弯折力的阻挠,也降低了整个采收机的功耗。
为保证传动链条21水平方向的分速度与机架7的移动速度相匹配,在传动链条21上设有第二速度传感器。
第一速度传感器用于采集机架7的移动速度,而第二速度传感器用于采集传动链条21的线速度,第一速度传感器和第二速度传感器均将采集到的速度信息传输到处理器。
处理器根据传动链条21的速度和传动链条21的倾斜角度,计算出传动链条21在水平方向上的分速度。处理器输出信号到驱动电机,对驱动电机的转速进行调整,进而使得机架7的移动速度与传动链条21在水平方向上的分速度相匹配,保证烟叶的采摘效果。
本实施例中,如图9所示,处理器包括单片机U1(型号为STM32),第一速度传感器和第二速度传感器均采用编码器23,第一速度传感器的编码器23装在行走轮1上;而第二速度传感器的编码器23装在传动链条21的从动齿轮上。
第一速度传感器和第二速度传感器连接单片机U1的信号输入端,单片机U1的信号输出端连接电机驱动模块,电机驱动模块输出信号驱动电机进行调速即可。其中,驱动电机为步进电机。
其中,第一速度传感器和第二速度传感器选用的编码器为:生产厂家为欧姆龙,型号为E6B2-CWZ6C的编码器。使用的时候,直接将编码器的橙色线(输出Z相)连接单片机U1的PA0引脚。单片机根据接收到的编码器的信号得出转速为成熟的现有技术,本实施例不涉及对程序的改进。
电机驱动模块包括PWM8713脉冲分配器U2和光耦;单片机U1的PWM信号输出端(PB5、PA7)连接PWM8713脉冲分配器U2的脉冲输入端(引脚3、4),PWM8713脉冲分配器U2的脉冲输出端(引脚12、11、10)分别连接驱动电机的三相输入端。
为实现两个采收架在机架7上的安装,在采收架外侧设有两个安装杆9,两个安装杆9沿采收架长度方向依次设置,安装杆9安装于机架7上。
具体的:机架7上设有L型板8,L型板8上设有通孔,安装杆9穿设于通孔中;L型板8上还设有顶丝13,顶丝13顶设于安装杆9上。
本实施例中,通过调整两个安装杆9在机架7上伸出的长度,可以调整采收架相对于机架7的倾斜角度。
此处:由于前面介绍过传动链条21为倾斜的,且传动链条21安装在采收架上;此处:只需要调整采收架的倾斜角度,就可以实现传动链条21倾斜角度的调整,进而提高本采收机的适用范围,也提高了本采收机的使用效果。
传输部2用于对采收到的烟叶进行传输,其中,传输部2包括传送辊组19,每个采收单元下方均设有1个传送辊组19,两个传送辊组19之间预留有通过间隙15。在通过间隙15上设有沿通过间隙15宽度方向设置的刷毛,刷毛填充满了通过间隙15,刷毛端部连接在传送辊组19,刷毛末端为自由端。通过设置刷毛,既保证了植株通过,又避免了烟叶掉落到通过间隙15中造成遗失。
传送辊组19包括多个沿机架7宽度方向设置的传送辊10,相邻传送辊10之间的间隙小于10mm。本实施例中,一个传送辊组19有5个传送辊10。
机架7上设有转动电机,转动电机带动各个传送辊10相对于机架7转动;传送辊10的转动方向为朝向机架7外侧转动,从而将掉落上去的烟叶传送到机架7外侧。从而同一个传输棍组的传送辊10的转动方向相同,两个传输棍组的转动方向相反。
为避免杂草或烟叶在传输棍组末端堆积,在每个采收单元下方均设有一个拨轮11,拨轮11上连接有带动拨轮11转动的防绕电机12,防绕电机12安装在机架7上。拨轮11位于传送辊组19上方且拨轮11设置于机架7的后方。拨轮11的转动方向也为朝向机架7外侧,从而可以将传输棍组上的烟叶或杂质拨到机架7外侧,避免缠绕到传输棍组上,或从传输棍组之间掉落下来。
在机架7上设有位于传送辊组19侧下方的传送带箱体6,传送带箱体6靠近传送辊组19的一侧为开口的,传送带箱体内设有传送带,从而方便从传送辊组19上掉落下来的烟叶进入到传送带上传送带的传送末端设置有提升机构5。提升机构5的上方设有收集箱4,从传送棍组下来的烟叶被送到传送带6,传送带6将烟叶传送到提升机构5处,提升机构5将烟叶进行提升,最终提升到收集箱4内即可。
本实施例中,传送带6和提升机构5的具体结构在本实施例中不再赘述,具体的实施方式与专利号为(201911359723.X)的申请相同,此部分内容不涉及方案的改进,采用现有技术公开的方式即可。
本发明所述的烟叶采收机,采收效果好,实现了烟叶的分层采摘,烟叶损坏小,采收效率高;一方面降低了人力劳动强度,另外一方面本采收机可以极大限度降低对烟株的损坏,保证了烟株后续的生长,采收过程中受到的阻力降低,设备功耗低。
本实施例还公开了一种利用上述烟叶采收机进行的烟叶采收方法,所述方法依次包括如下步骤:
(1)机架7行走,烟株进入到机架7内的植株间隙16中。
(2)机架7向前方行走,传动链条21朝向机架7后下方传动,传动链条21带动采摘杆16向机架7的后下方循环传动。
(3)随着传动链条21的传动,烟株进入到采摘杆16围成的采摘框18内。
随着传动链条21的传动,采摘框18自上而下将烟株上的烟叶折下来;其中,同一个传动链条21上相邻两个采摘杆16之间的距离为P,P×cosα=D
此处,P为两个相邻的位于同一传动链条21上的采摘杆16之间的距离,实施的过程中,如果P取值过小则容易装不下植株影响采摘效果,如果P取值过大,则容易造成烟叶主筋断裂,影响烟叶的采摘效果。经过实验,发明人发现P×cosα取值在100mm比较合适。
(4)烟叶折下来后落入到传送辊10上,传送辊10转动,将烟叶送入到收集箱4内。
机架7行走的过程中,根据传动链条21的传动速度调整机架7的行走速度,具体实现方式为:传动链条21的传动方向为朝向机架7的后下方倾斜传动,其中,传动链条21的传动线速度为V,则机架7的行走速度为:Vcosα,其中α为传动链条21相对于水平方向的倾斜角度。
在实施的过程中,通过根据传动链条21的传动速度,调整机架7的行走速度,以使得机架7的行走速度与传动链条21在水平方向的分速度大小相同,方向相反。保证传动链条21相对于植株只有竖直方向上的分速度,进而使得传动链条21相对植株在竖直方向上向下移动,进而使得采摘框18相对烟叶向下行走,采摘框18将烟叶向下弯折,最终折下,被折下的烟叶进入到传输部2,通过传输部2传送到收集箱4即可。
本实施例所述的采摘方法,采摘效果好,烟叶完整度高,采摘过程中,机架7受到的水平方向上的阻挠力较小,整个采摘机功耗低。
其中,本实施例中,传动链条21的传动距离L为:L=Sn
本发明所述的烟叶采收方法可以实现烟叶的非人工采收,采收效率高,同时,采收下的烟叶完整度高,不易损坏,另外,本采收方法功耗低,可以提高烟农的经济效益,降低烟农的劳动强度。
- 烟草采收机用烟叶采收装置
- 烟叶采收装置及采收方法