一种智能跟随的移动小车
文献发布时间:2023-06-19 19:20:08
技术领域
本发明涉及自跟随智能小车技术领域,具体为一种智能跟随的移动小车。
背景技术
智能跟随的移动小车是一种可自动跟随人体进行移动的小体量车体,智能跟随小车的出现无需人为操作施力,这种小车被广泛用于老年人的生活,可以为老年人装载一定的物品,而不需要老年人进行背负携带,以方便老年人的出行。
现有智能跟随的移动小车体积小巧以方便跟随人们出行,但在实际使用过程中由于小车承载物品,因小车体积限制,物品位于低矮处,往往需要人们弯腰或蹲下才能取出小车所承载的物品,从而对于腰部并不健康的老年人来说并不友好。
发明内容
针对现有技术的不足,本发明提供了一种智能跟随的移动小车,解决了上述背景技术中提出的问题。
为实现以上目的,本发明通过以下技术方案予以实现:一种智能跟随的移动小车,包括车体主架和控制系统,所述车体主架的内部固定有控制箱,且控制箱的内部中部设置有分层板,所述控制系统设置于分层板的下方,且分层板的上表面设置有剪式升降架,所述剪式升降架的顶部设置有储物盒,所述控制箱的右面上部固定有伺服电机,且伺服电机的输出端连接有盖板,所述车体主架的左侧底端设置有万向轮,所述控制箱右面的一侧设置第一变速电机,且控制箱右面的另一侧设置有第二变速电机,所述第一变速电机、第二变速电机的输出端连接有驱动轮,所述控制系统包括追踪模块、控制模块、障碍物感应模块和接收模块,所述追踪模块、障碍物感应模块、接收模块的输出端连接有控制模块,所述追踪模块远程连接有踪源模块,所述接收模块远程连接有遥控器,所述控制模块还通过导线连接有方向控制杆件。
进一步的,所述方向控制杆件设置于车体主架一侧上部,且方向控制杆件与控制模块连接的导线埋设于车体主架的内部。
进一步的,所述追踪模块用于追踪踪源模块的方位和判断两者之间的距离,所述障碍物感应模块用于感应小车移动路径上的障碍物。
进一步的,所述控制系统用于控制第一变速电机、第二变速电机的转速以实现小车的转向。
进一步的,所述车体主架的左侧底部设置有撑脚组件,所述撑脚组件包括旋转杆、第一内槽、转轴和脚撑板,所述旋转杆的内部开设有第一内槽,且第一内槽的内部插入有转轴,所述转轴远离第一内槽的一端固定有脚撑板。
进一步的,所述撑脚组件还包括轴承环和弹簧伸缩杆,所述第一内槽的内部设置有轴承环,且轴承环的一侧连接有弹簧伸缩杆。
进一步的,所述转轴贯穿轴承环的内部,且转轴通过轴承环与弹簧伸缩杆弹性连接。
进一步的,所述撑脚组件还包括第二内槽,所述旋转杆的内部还开设有第二内槽,且第二内槽与第一内槽相连通。
进一步的,所述撑脚组件还包括齿形端和卡合齿轮,所述第二内槽的一端设置有齿形端,所述转轴远离脚撑板的一端穿过第一内槽而伸入第二内槽内部的同时连接有卡合齿轮。
进一步的,所述卡合齿轮的外口结构尺寸与齿形端的内口结构尺寸相适配,且卡合齿轮与转轴固定连接。
本发明提供了一种智能跟随的移动小车,具备以下有益效果:
1.该智能跟随的移动小车,具有三种控制模式,分别为利用追踪模块、障碍物感应模块追踪踪源模块并保持固定距离跟随并躲避路径上障碍物的智能跟随模式,也可人体乘坐于盖板表面,通过操控方向控制杆件控制小车移动的乘坐操控模式,以及通过遥控器远程发送控制命令以控制小车移动的远程遥控模式,此三种控制模式有利于适应于不同人们出行的生活习惯。
2.该智能跟随的移动小车,人们出行所需要携带的物品放置于储物盒内部,人们在需要取放物品时,只需按动踪源模块、方向控制杆件或遥控器上的按钮,此时伺服电机驱动盖板旋转而将储物盒露出,接着剪式升降架升起将储物盒顶升至适宜高度,从而方便人们取放物品,而无需人们弯腰,以保护腰部。
3.该智能跟随的移动小车,在乘坐操控模式下,人体乘坐于盖板表面,而旋转杆旋出,使得人体脚部可放置于脚撑板上,由此有利于提高人们在乘坐操控模式下的腿部舒适度,且在其余两种模式下,旋转杆通过旋转位于车体主架内部,从而有利于减小小车体积。
4.该智能跟随的移动小车,在将脚部放置于脚撑板上时,可通过脚部用力使得脚撑板对弹簧伸缩杆施加推力,此时弹簧伸缩杆收缩,而使得卡合齿轮与齿形端分离,此时脚部的脚尖部位或脚后跟部位用力,以带动脚撑板顺时针或逆时针旋转,以调整倾斜度,以此有利于调整对脚部的支撑角度,以提高人体舒适度,且在角度确定后脚部卸力,此时弹簧伸缩杆伸展复位,使得卡合齿轮与齿形端重新卡合,由此可对调整后的支撑角度进行固定,以防止脚撑板随意选择。
附图说明
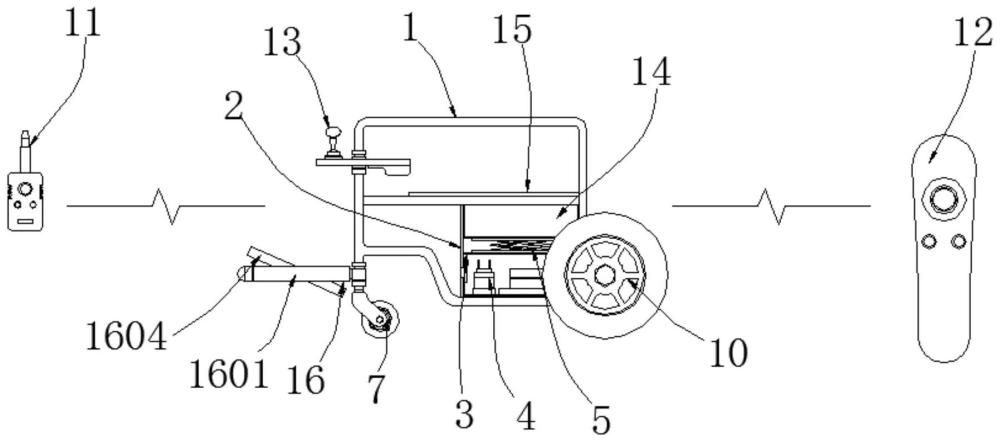
图1为本发明一种智能跟随的移动小车的车体主架正视结构示意图;
图2为本发明一种智能跟随的移动小车的控制箱右侧结构示意图;
图3为本发明一种智能跟随的移动小车的智能跟随模式的流程示意图;
图4为本发明一种智能跟随的移动小车的远程遥控模式的流程示意图;
图5为本发明一种智能跟随的移动小车的乘坐操控模式的流程示意图;
图6为本发明一种智能跟随的移动小车的旋转杆背视结构示意图;
图7为本发明一种智能跟随的移动小车的旋转杆右视剖面结构示意图。
图中:1、车体主架;2、控制箱;3、分层板;4、控制系统;401、追踪模块;402、控制模块;403、障碍物感应模块;404、接收模块;5、剪式升降架;6、伺服电机;7、万向轮;8、第一变速电机;9、第二变速电机;10、驱动轮;11、踪源模块;12、遥控器;13、方向控制杆件;14、储物盒;15、盖板;16、撑脚组件;1601、旋转杆;1602、第一内槽;1603、转轴;1604、脚撑板;1605、轴承环;1606、弹簧伸缩杆;1607、第二内槽;1608、齿形端;1609、卡合齿轮。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
如图1-图5所示,本发明提供技术方案:一种智能跟随的移动小车,包括车体主架1和控制系统4,车体主架1的内部固定有控制箱2,且控制箱2的内部中部设置有分层板3,控制系统4设置于分层板3的下方,且分层板3的上表面设置有剪式升降架5,剪式升降架5的顶部设置有储物盒14,控制箱2的右面上部固定有伺服电机6,且伺服电机6的输出端连接有盖板15,车体主架1的左侧底端设置有万向轮7,控制箱2右面的一侧设置第一变速电机8,且控制箱2右面的另一侧设置有第二变速电机9,第一变速电机8、第二变速电机9的输出端连接有驱动轮10,控制系统4包括追踪模块401、控制模块402、障碍物感应模块403和接收模块404,追踪模块401、障碍物感应模块403、接收模块404的输出端连接有控制模块402,追踪模块401远程连接有踪源模块11,接收模块404远程连接有遥控器12,控制模块402还通过导线连接有方向控制杆件13,方向控制杆件13设置于车体主架1一侧上部,且方向控制杆件13与控制模块402连接的导线埋设于车体主架1的内部,追踪模块401用于追踪踪源模块11的方位和判断两者之间的距离,障碍物感应模块403用于感应小车移动路径上的障碍物,控制系统4用于控制第一变速电机8、第二变速电机9的转速以实现小车的转向;
具体操作如下,根据使用需求该小车共具有三种控制模式,分别为利用追踪模块401、障碍物感应模块403追踪踪源模块11并保持固定距离跟随并躲避路径上障碍物的智能跟随模式,也可人体乘坐于盖板15表面,通过操控方向控制杆件13控制小车移动的乘坐操控模式,以及通过遥控器12远程发送控制命令以控制小车移动的远程遥控模式,此三种控制模式有利于适应于不同人们出行的生活习惯,其中智能跟随模式的具体工作流程如下,人体携带踪源模块11自行移动,此时该小车上的追踪模块401实时追踪踪源模块11的方位并判断两者之间的距离,再由控制模块402基于踪源模块11的方和距离驱动第一变速电机8、第二变速电机9带动驱动轮10转动,由此使得该小车进行移动,且通过控制第一变速电机8、第二变速电机9的转速可以实现小车的转向,而小车在跟随移动时,障碍物感应模块403实时感应路径上的障碍物,并由控制模块402调节第一变速电机8、第二变速电机9的转速以改变小车跟随路径,以躲避障碍物,而在乘坐操控模式时,人体坐于盖板15表面,并手持方向控制杆件13上的控制杆进行推动,基于推动方向由控制模块402接收指令以控制第一变速电机8、第二变速电机9带动驱动轮10转动,以实现对小车的操控,而远程遥控模式时,人体推动遥控器12上的方向杆,由接收模块404接收遥控器12的信号,再由控制模块402控制第一变速电机8、第二变速电机9带动驱动轮10转动,以实现对小车的远程遥控,而且人们出行所需要携带的物品放置于储物盒14内部,人们在需要取放物品时,只需按动踪源模块11、方向控制杆件13或遥控器12上的按钮,此时伺服电机6驱动盖板15旋转而将储物盒14露出,接着剪式升降架5升起将储物盒14顶升至适宜高度,从而方便人们取放物品,而无需人们弯腰,以保护腰部。
如图1、图6-图7所示,车体主架1的左侧底部设置有撑脚组件16,撑脚组件16包括旋转杆1601、第一内槽1602、转轴1603和脚撑板1604,旋转杆1601的内部开设有第一内槽1602,且第一内槽1602的内部插入有转轴1603,转轴1603远离第一内槽1602的一端固定有脚撑板1604;
具体操作如下,在乘坐操控模式下,人体乘坐于盖板15表面,而旋转杆1601旋出,使得人体脚部可放置于脚撑板1604上,由此有利于提高人们在乘坐操控模式下的腿部舒适度,且在其余两种模式下,旋转杆1601通过旋转位于车体主架1内部,从而有利于减小小车体积。
如图1、图6-图7所示,撑脚组件16还包括轴承环1605和弹簧伸缩杆1606,第一内槽1602的内部设置有轴承环1605,且轴承环1605的一侧连接有弹簧伸缩杆1606,转轴1603贯穿轴承环1605的内部,且转轴1603通过轴承环1605与弹簧伸缩杆1606弹性连接,撑脚组件16还包括第二内槽1607,旋转杆1601的内部还开设有第二内槽1607,且第二内槽1607与第一内槽1602相连通,撑脚组件16还包括齿形端1608和卡合齿轮1609,第二内槽1607的一端设置有齿形端1608,转轴1603远离脚撑板1604的一端穿过第一内槽1602而伸入第二内槽1607内部的同时连接有卡合齿轮1609,卡合齿轮1609的外口结构尺寸与齿形端1608的内口结构尺寸相适配,且卡合齿轮1609与转轴1603固定连接;
具体操作如下,在将脚部放置于脚撑板1604上时,可通过脚部用力使得脚撑板1604对弹簧伸缩杆1606施加推力,此时弹簧伸缩杆1606收缩,使得转轴1603沿第一内槽1602内部移动,而使得卡合齿轮1609与齿形端1608分离,此时脚部的脚尖部位或脚后跟部位用力,以带动脚撑板1604顺时针或逆时针旋转,以调整倾斜度,以此有利于调整对脚部的支撑角度,以提高人体舒适度,且在角度确定后脚部卸力,此时弹簧伸缩杆1606伸展复位,使得卡合齿轮1609与齿形端1608重新卡合,由此可对调整后的支撑角度进行固定,以防止脚撑板1604随意选择。
综上,如图1-图7所示,该智能跟随的移动小车,使用时,首先根据使用需求该小车共具有三种控制模式,智能跟随模式、乘坐操控模式和远程遥控模式,此三种控制模式有利于适应于不同人们出行的生活习惯,其中智能跟随模式的具体工作流程如下,人体携带踪源模块11自行移动,此时该小车上的追踪模块401实时追踪踪源模块11的方位并判断两者之间的距离,再由控制模块402基于踪源模块11的方和距离驱动第一变速电机8、第二变速电机9带动驱动轮10转动,由此使得该小车进行移动,且通过控制第一变速电机8、第二变速电机9的转速可以实现小车的转向,而小车在跟随移动时,障碍物感应模块403实时感应路径上的障碍物,并由控制模块402调节第一变速电机8、第二变速电机9的转速以改变小车跟随路径,以躲避障碍物;
而在乘坐操控模式时,人体坐于盖板15表面,并手持方向控制杆件13上的控制杆进行推动,基于推动方向由控制模块402接收指令以控制第一变速电机8、第二变速电机9带动驱动轮10转动,以实现对小车的操控;
而远程遥控模式时,人体推动遥控器12上的方向杆,由接收模块404接收遥控器12的信号,再由控制模块402控制第一变速电机8、第二变速电机9带动驱动轮10转动,以实现对小车的远程遥控;
而且人们出行所需要携带的物品放置于储物盒14内部,人们在需要取放物品时,只需按动踪源模块11、方向控制杆件13或遥控器12上的按钮,此时伺服电机6驱动盖板15旋转而将储物盒14露出,接着剪式升降架5升起将储物盒14顶升至适宜高度,从而方便人们取放物品,而无需人们弯腰,以保护腰部;
其中在乘坐操控模式下,人体乘坐于盖板15表面,而旋转杆1601旋出,使得人体脚部可放置于脚撑板1604上,由此有利于提高人们在乘坐操控模式下的腿部舒适度,且在其余两种模式下,旋转杆1601通过旋转位于车体主架1内部,从而有利于减小小车体积;
在将脚部放置于脚撑板1604上时,可通过脚部用力使得脚撑板1604对弹簧伸缩杆1606施加推力,此时弹簧伸缩杆1606收缩,使得转轴1603沿第一内槽1602内部移动,而使得卡合齿轮1609与齿形端1608分离,此时脚部的脚尖部位或脚后跟部位用力,以带动脚撑板1604顺时针或逆时针旋转,以调整倾斜度,以此有利于调整对脚部的支撑角度,以提高人体舒适度,且在角度确定后脚部卸力,此时弹簧伸缩杆1606伸展复位,使得卡合齿轮1609与齿形端1608重新卡合,由此可对调整后的支撑角度进行固定,以防止脚撑板1604随意选择;
进一步的乘坐操控模式时,人体坐于盖板15表面,盖板15表面可安放有坐垫用于提高人体乘坐时的舒适度,且盖板15表面还开设有螺纹孔,此时整个小车可作为移动底盘使用,在利用盖板15表面的螺纹孔,通过螺栓将用于承载物品的装载平台安装至盖板15表面,由此该小车可以针对不同的载物承接对于的装载平台,从而扩大该小车的适用范围,并且该小车于控制箱2的右侧面开设有接口组,以便后续增设其他机械组件,以便实现功能定制。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
- 一种智能小车及移动控制终端
- 一种智能跟随小车的视觉跟随方法及装置
- 一种智能跟随小车的视觉跟随方法及装置