一种工厂货物转移码垛机械臂
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及码垛机械技术领域,具体为一种工厂货物转移码垛机械臂。
背景技术
目前,工业自动化生产领域多采用各种专用机器或机械臂实现物料的搬运和堆码,以提高作业效率及整体生产率。根据生产线的种类条件和物料的体积重量等的不同,这些设备形态各异。相对于专用机器而言,机械臂由于占地面积小,结构简单,操作灵活,可实现柔性作业等优势,在物料的搬运和堆码领域获得了普遍的应用。机械臂的结构形式中比较有代表性的如通用关节型工业机械臂,或者SCARA形平面坐标机械臂等,同时在工厂货物进行转移中,因为货物的体型较大,因此都会使用机械臂机芯码垛转移,而现有工厂中的机械臂在对带有粉尘货物进行码垛时,例如小麦粉和大豆粉,在进行码垛放置时会溅起大量粉尘,对工作环境造成影响,为此我们提出了一种工厂货物转移码垛机械臂。
发明内容
针对现有技术的不足,本发明提供了一种工厂货物转移码垛机械臂,解决了上述背景技术中提出的问题。
为实现以上目的,本发明通过以下技术方案予以实现:一种工厂货物转移码垛机械臂,包括安装箱,所述安装箱的顶部开设有第三滑槽,所述第三滑槽的内部滑动连接有两个第三滑块,所述第三滑块的一侧固定安装有安装外壳,所述安装箱的一侧固定安装有抽气箱,所述安装箱的内部转动连接有第二往复丝杆,所述第二往复丝杆的外侧螺纹连接有第二移动板,所述第二移动板的一侧固定安装有两个第一连接杆,所述第一连接杆的一端固定连接有活塞,所述活塞与抽气箱滑动连接,所述抽气箱的顶部固定安装有滤箱,所述滤箱的顶部开设有输出口,所述滤箱的内部固定安装有两个滤网,所述抽气箱的一侧固定安装有输入管,所述抽气箱的顶部固定安装有输出管,所述输出管与输入管的外侧均设置有单向阀,所述安装箱的内部固定安装有第一电机,所述第一电机的输出端固定安装有第三转轴,所述第三转轴的外侧固定套接有第一锥齿轮,所述安装外壳的底部固定安装有电动伸缩杆,所述电动伸缩杆的输出端固定套接有第二锥齿轮,所述第二锥齿轮与第一锥齿轮啮合连接,所述第二往复丝杆的外侧固定套接有第二皮带轮,所述第三转轴的外侧固定套接有第一皮带轮,所述第一皮带轮通过皮带与第二皮带轮传动连接。
可选的,所述安装外壳的内部固定安装有安装板,所述安装板的外侧设置有齿条,所述安装板的外侧设置有支撑臂,所述支撑臂的内部转动连接有第二转轴。
可选的,所述第二转轴的外侧固定套接有蜗轮,所述第二转轴的外侧固定套接有齿轮本体,所述齿轮本体与齿条啮合连接,所述支撑臂的顶部固定安装有第四电机,所述第四电机的输出端固定安装有蜗杆,所述蜗杆与蜗轮啮合连接。
可选的,所述支撑臂的顶部固定安装有第三电机,所述第三电机的输出端固定安装有第一转轴,所述第一转轴的外侧固定套接有第一转动块,所述第一转动块的一侧固定安装有第一连接臂。
可选的,所述第一连接臂的内部固定安装有第二电机,所述第二电机的输出端固定安装有第一调节臂,所述第一连接臂的内部开设有第一滑槽,所述第一滑槽的内部滑动连接有两个第一滑块,所述第一滑块与第一调节臂固定连接。
可选的,所述第一调节臂的一侧固定安装有连接板,所述连接板的内部开设有两个第二滑槽,两个所述第二滑槽的内部均滑动连接有第二滑块,两个所述第二滑块之间固定安装有第二连接臂。
可选的,所述第二连接臂的内部开设有安装槽,所述安装槽的内部固定安装有电磁铁,所述第二连接臂的内部设置有拉杆,所述拉杆的一端固定安装有限位板,所述拉杆的另一端固定安装有磁性块,所述磁性块与电磁铁磁性连接。
可选的,所述第二连接臂的内部固定安装有伸缩弹簧,所述拉杆贯穿伸缩弹簧,所述第二连接臂的一侧开设有第一卡槽,所述第一卡槽的内部卡接有第一卡块,所述第一卡块的一侧固定安装有第三连接臂,所述第一卡块的外侧开设有限位槽,所述限位板与限位槽相适配。
可选的,所述第三连接臂的一侧固定安装有侧板,所述侧板的顶部开设有第四滑槽,所述第四滑槽的内部滑动连接有第二转动块,所述第二转动块的外侧转动连接有第二连接杆,所述侧板的顶部固定安装有第五电机,所述第五电机的输出端固定安装有第一往复丝杆,所述第一往复丝杆的外侧螺纹连接有第一移动板,所述第一移动板与第二连接杆转动连接。
可选的,所述第二转动块的底部固定安装有固定块,所述固定块的底部开设有第二卡槽,所述第二卡槽的内部卡接有第二卡块,所述第二卡块的底部固定安装有底板,所述底板的一侧固定安装有夹持板。
本发明提供了一种工厂货物转移码垛机械臂,具备以下有益效果:
1、该工厂货物转移码垛机械臂,通过第一电机带动第三转轴进行旋转,可以带动外侧的第一皮带轮进行旋转,利用第一皮带轮与第二皮带轮传动连接,可以带动第二往复丝杆进行旋转,利用第二往复丝杆旋转与第二移动板螺纹连接,可以调节第二移动板的位置,接着利用第二移动板转动可以带动一侧的第一连接杆进行移动,由此可以带动活塞在抽气箱的内部滑动,借助输入管可以将外部的空气抽入抽气箱的内部,接着利用输出管可以将其喷入滤箱的内部,利用滤网可以对空气中的粉尘进行过滤,最后将新鲜空气从输出口的内部喷出,由此可以在码垛时防止粉尘影响工作环境,提高了实用性。
2、该工厂货物转移码垛机械臂,通过利用电动伸缩杆带动第二锥齿轮进行移动,利用第二锥齿轮与第一锥齿轮啮合连接,可以带动电动伸缩杆进行旋转,电动伸缩杆旋转时带动安装外壳进行转动,同时带动第三滑块在第三滑槽的内部滑动,由此可以根据需求调节安装外壳的角度,利用第四电机带动蜗杆进行旋转,利用蜗杆与蜗轮啮合连接,可以带动第二转轴进行转动,利用第二转轴旋转可以带动外侧的齿轮本体进行转动,利用齿轮本体与齿条啮合连接,可以根据调节支撑臂的位置,利用第二电机带动第一调节臂进行旋转,可以调节一侧第二连接臂的角度,提高了功能性。
3、该工厂货物转移码垛机械臂,通过利用电磁铁对磁性块进行吸附,可以带动拉杆一端的限位板进行移动,限位板移动时对伸缩弹簧进行压缩,接着将第一卡块卡入到第一卡槽的内部,可以完成第三连接臂的安装工作,接着解除电磁铁的吸附力,利用伸缩弹簧回弹可以将限位板卡入到限位槽的内部,完成第一卡块的限位工作,可以根据需求对第一卡块进行拆卸,接着利用第五电机带动第一往复丝杆进行旋转,可以带动第一移动板进行移动,第一移动板移动时调节第二连接杆的角度,第二连接杆旋转带动第二转动块在第四滑槽的内部滑动,通过将第二卡块卡入到第二卡槽的内部,可以完成底板的安装工作,第二转动块滑动时可以带动底板一侧的夹持板对货物进行夹持,由此完成码垛工作。
附图说明
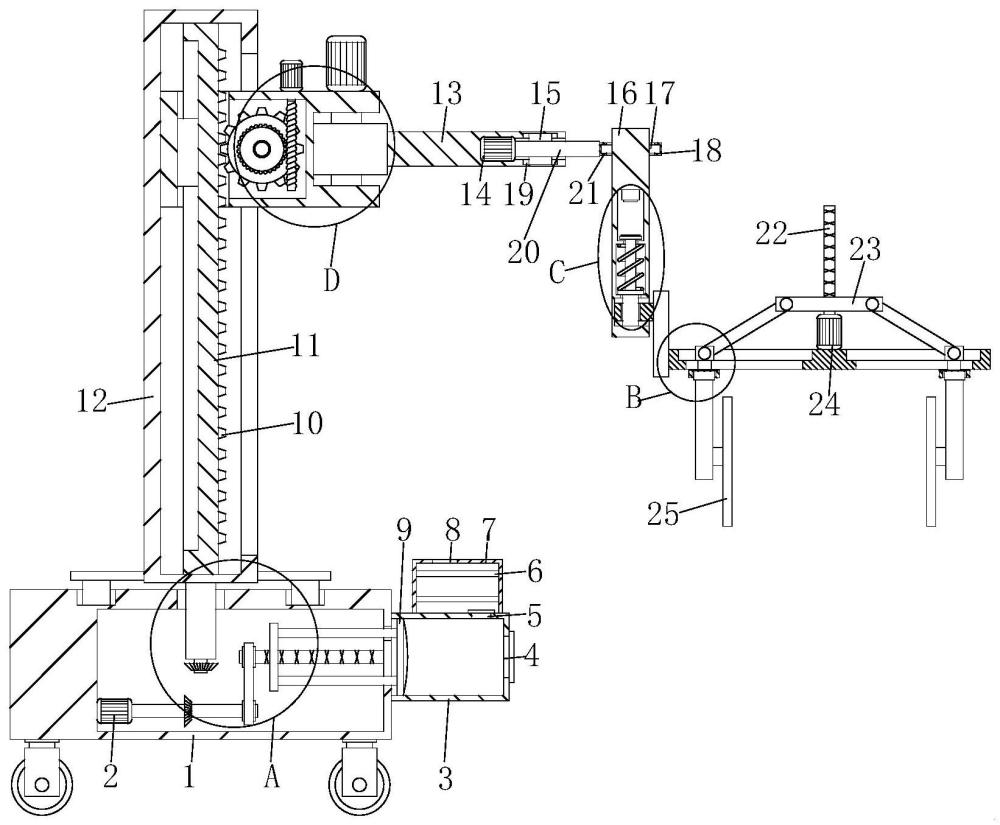
图1为本发明结构示意图;
图2为本发明的正面示意图;
图3为本发明图1中的A处放大图;
图4为本发明图1中的B处放大图;
图5为本发明图1中的C处放大图;
图6为本发明图1中的D处放大图。
图中:1、安装箱;2、第一电机;3、抽气箱;4、输入管;5、输出管;6、滤网;7、滤箱;8、输出口;9、活塞;10、齿条;11、安装板;12、安装外壳;13、第一连接臂;14、第二电机;15、第一滑块;16、第二连接臂;17、第二滑块;18、连接板;19、第一滑槽;20、第一调节臂;21、第二滑槽;22、第一往复丝杆;23、第一移动板;24、第五电机;25、夹持板;26、电磁铁;27、拉杆;28、第三连接臂;29、限位板;30、限位槽;31、第一卡块;32、第一卡槽;33、伸缩弹簧;34、磁性块;35、安装槽;36、第一转动块;37、第一转轴;38、第三电机;39、第四电机;40、第二转轴;41、蜗轮;42、齿轮本体;43、蜗杆;44、支撑臂;45、第二移动板;46、第二往复丝杆;47、第一连接杆;48、第三滑块;49、第三滑槽;50、第一皮带轮;51、第二皮带轮;52、第三转轴;53、第一锥齿轮;54、第二锥齿轮;55、电动伸缩杆;56、第二连接杆;57、第四滑槽;58、第二卡槽;59、第二卡块;60、底板;61、固定块;62、侧板;63、第二转动块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
请参阅图1至图6,一种工厂货物转移码垛机械臂,包括安装箱1,安装箱1的顶部开设有第三滑槽49,第三滑槽49的内部滑动连接有两个第三滑块48,第三滑块48的一侧固定安装有安装外壳12,安装箱1的一侧固定安装有抽气箱3,安装箱1的内部转动连接有第二往复丝杆46,第二往复丝杆46的外侧螺纹连接有第二移动板45,第二移动板45的一侧固定安装有两个第一连接杆47,第一连接杆47的一端固定连接有活塞9,活塞9与抽气箱3滑动连接,抽气箱3的顶部固定安装有滤箱7,滤箱7的顶部开设有输出口8,滤箱7的内部固定安装有两个滤网6,抽气箱3的一侧固定安装有输入管4,抽气箱3的顶部固定安装有输出管5,输出管5与输入管4的外侧均设置有单向阀,安装箱1的内部固定安装有第一电机2,第一电机2的输出端固定安装有第三转轴52,第三转轴52的外侧固定套接有第一锥齿轮53,安装外壳12的底部固定安装有电动伸缩杆55,电动伸缩杆55的输出端固定套接有第二锥齿轮54,第二锥齿轮54与第一锥齿轮53啮合连接,第二往复丝杆46的外侧固定套接有第二皮带轮51,第三转轴52的外侧固定套接有第一皮带轮50,第一皮带轮50通过皮带与第二皮带轮51传动连接,通过第一电机2带动第三转轴52进行旋转,可以带动外侧的第一皮带轮50进行旋转,利用第一皮带轮50与第二皮带轮51传动连接,可以带动第二往复丝杆46进行旋转,利用第二往复丝杆46旋转与第二移动板45螺纹连接,可以调节第二移动板45的位置,接着利用第二移动板45转动可以带动一侧的第一连接杆47进行移动,由此可以带动活塞9在抽气箱3的内部滑动,借助输入管4可以将外部的空气抽入抽气箱3的内部,接着利用输出管5可以将其喷入滤箱7的内部,利用滤网6可以对空气中的粉尘进行过滤,最后将新鲜空气从输出口8的内部喷出,由此可以在码垛时防止粉尘影响工作环境,提高了实用性。
其中:
安装外壳12的内部固定安装有安装板11,安装板11的外侧设置有齿条10,安装板11的外侧设置有支撑臂44,支撑臂44的内部转动连接有第二转轴40,第二转轴40的外侧固定套接有蜗轮41,第二转轴40的外侧固定套接有齿轮本体42,齿轮本体42与齿条10啮合连接,支撑臂44的顶部固定安装有第四电机39,第四电机39的输出端固定安装有蜗杆43,蜗杆43与蜗轮41啮合连接,支撑臂44的顶部固定安装有第三电机38,第三电机38的输出端固定安装有第一转轴37,第一转轴37的外侧固定套接有第一转动块36,第一转动块36的一侧固定安装有第一连接臂13,第一连接臂13的内部固定安装有第二电机14,第二电机14的输出端固定安装有第一调节臂20,第一连接臂13的内部开设有第一滑槽19,第一滑槽19的内部滑动连接有两个第一滑块15,第一滑块15与第一调节臂20固定连接,第一调节臂20的一侧固定安装有连接板18,连接板18的内部开设有两个第二滑槽21,两个第二滑槽21的内部均滑动连接有第二滑块17,两个第二滑块17之间固定安装有第二连接臂16,通过利用电动伸缩杆55带动第二锥齿轮54进行移动,利用第二锥齿轮54与第一锥齿轮53啮合连接,可以带动电动伸缩杆55进行旋转,电动伸缩杆55旋转时带动安装外壳12进行转动,同时带动第三滑块48在第三滑槽49的内部滑动,由此可以根据需求调节安装外壳12的角度,利用第四电机39带动蜗杆43进行旋转,利用蜗杆43与蜗轮41啮合连接,可以带动第二转轴40进行转动,利用第二转轴40旋转可以带动外侧的齿轮本体42进行转动,利用齿轮本体42与齿条10啮合连接,可以根据调节支撑臂44的位置,利用第二电机14带动第一调节臂20进行旋转,可以调节一侧第二连接臂16的角度,提高了功能性。
其中:
第二连接臂16的内部开设有安装槽35,安装槽35的内部固定安装有电磁铁26,第二连接臂16的内部设置有拉杆27,拉杆27的一端固定安装有限位板29,拉杆27的另一端固定安装有磁性块34,磁性块34与电磁铁26磁性连接,第二连接臂16的内部固定安装有伸缩弹簧33,拉杆27贯穿伸缩弹簧33,第二连接臂16的一侧开设有第一卡槽32,第一卡槽32的内部卡接有第一卡块31,第一卡块31的一侧固定安装有第三连接臂28,第一卡块31的外侧开设有限位槽30,限位板29与限位槽30相适配,第三连接臂28的一侧固定安装有侧板62,侧板62的顶部开设有第四滑槽57,第四滑槽57的内部滑动连接有第二转动块63,第二转动块63的外侧转动连接有第二连接杆56,侧板62的顶部固定安装有第五电机24,第五电机24的输出端固定安装有第一往复丝杆22,第一往复丝杆22的外侧螺纹连接有第一移动板23,第一移动板23与第二连接杆56转动连接,第二转动块63的底部固定安装有固定块61,固定块61的底部开设有第二卡槽58,第二卡槽58的内部卡接有第二卡块59,第二卡块59的底部固定安装有底板60,底板60的一侧固定安装有夹持板25,通过利用电磁铁26对磁性块34进行吸附,可以带动拉杆27一端的限位板29进行移动,限位板29移动时对伸缩弹簧33进行压缩,接着将第一卡块31卡入到第一卡槽32的内部,可以完成第三连接臂28的安装工作,接着解除电磁铁26的吸附力,利用伸缩弹簧33回弹可以将限位板29卡入到限位槽30的内部,完成第一卡块31的限位工作,可以根据需求对第一卡块31进行拆卸,接着利用第五电机24带动第一往复丝杆22进行旋转,可以带动第一移动板23进行移动,第一移动板23移动时调节第二连接杆56的角度,第二连接杆56旋转带动第二转动块63在第四滑槽57的内部滑动,通过将第二卡块59卡入到第二卡槽58的内部,可以完成底板60的安装工作,第二转动块63滑动时可以带动底板60一侧的夹持板25对货物进行夹持,由此完成码垛工作。
综上,该工厂货物转移码垛机械臂,使用时,首先利用电磁铁26对磁性块34进行吸附,可以带动拉杆27一端的限位板29进行移动,限位板29移动时对伸缩弹簧33进行压缩,接着将第一卡块31卡入到第一卡槽32的内部,可以完成第三连接臂28的安装工作,接着解除电磁铁26的吸附力,利用伸缩弹簧33回弹可以将限位板29卡入到限位槽30的内部,完成第一卡块31的限位工作,可以根据需求对第一卡块31进行拆卸,接着利用第五电机24带动第一往复丝杆22进行旋转,可以带动第一移动板23进行移动,第一移动板23移动时调节第二连接杆56的角度,第二连接杆56旋转带动第二转动块63在第四滑槽57的内部滑动,通过将第二卡块59卡入到第二卡槽58的内部,可以完成底板60的安装工作,第二转动块63滑动时可以带动底板60一侧的夹持板25对货物进行夹持,通过利用电动伸缩杆55带动第二锥齿轮54进行移动,利用第二锥齿轮54与第一锥齿轮53啮合连接,可以带动电动伸缩杆55进行旋转,电动伸缩杆55旋转时带动安装外壳12进行转动,同时带动第三滑块48在第三滑槽49的内部滑动,由此可以根据需求调节安装外壳12的角度,利用第四电机39带动蜗杆43进行旋转,利用蜗杆43与蜗轮41啮合连接,可以带动第二转轴40进行转动,利用第二转轴40旋转可以带动外侧的齿轮本体42进行转动,利用齿轮本体42与齿条10啮合连接,可以根据调节支撑臂44的位置,利用第二电机14带动第一调节臂20进行旋转,可以调节一侧第二连接臂16的角度,通过第一电机2带动第三转轴52进行旋转,可以带动外侧的第一皮带轮50进行旋转,利用第一皮带轮50与第二皮带轮51传动连接,可以带动第二往复丝杆46进行旋转,利用第二往复丝杆46旋转与第二移动板45螺纹连接,可以调节第二移动板45的位置,接着利用第二移动板45转动可以带动一侧的第一连接杆47进行移动,由此可以带动活塞9在抽气箱3的内部滑动,借助输入管4可以将外部的空气抽入抽气箱3的内部,接着利用输出管5可以将其喷入滤箱7的内部,利用滤网6可以对空气中的粉尘进行过滤,最后将新鲜空气从输出口8的内部喷出,完成过滤工作。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种货物整列码垛系统
- 一种智慧工厂全自动装箱、码垛、搬运生产线
- 一种机械臂夹具及货物拣选码垛装置
- 一种工厂用于转移货物的电动液压车