侧净空雷达的标定方法
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及测量风机净空领域,尤其涉及一种侧净空雷达的标定方法。
背景技术
随着风力发电技术的发展,风电机组的叶片越来越长,意味着叶片越来越柔软,在旋转过程中变形非常大,有可能打到塔筒带来危险,因此,现有技术中,行业内的做法是通过在机舱顶部安装侧净空雷达,实时检测下叶尖到塔筒的净空距离。
在侧净空雷达的安装调试过程中,因侧净空雷达安装时的正确的姿态角度未知,导致难以确定当前雷达测得的净空值是否准确。因此,需要一种能够为侧净空雷达提供正确姿态角度的方法。
发明内容
本发明目的是:提供一种侧净空雷达的标定方法,以解决现有技术中存在的对侧净空雷达正确的姿态角难以确定的问题。
本发明的技术方案是:一种侧净空雷达的标定方法,用于测量当前风机下叶片的净空值,从而调整侧净空雷达至正确的姿态角;选择能见度良好,风速和风向均稳定的时段,并按如下步骤进行标定,所述步骤包括:
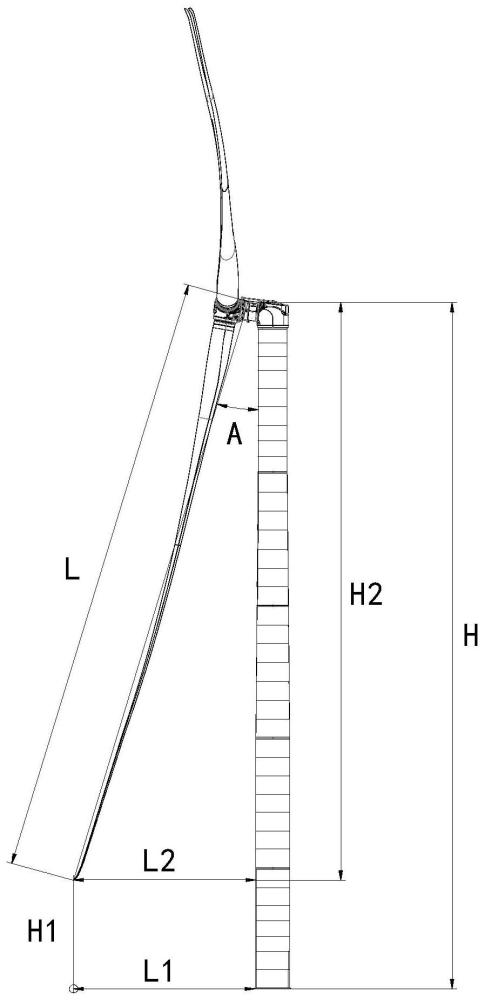
步骤一,已知侧净空雷达在机舱上的安装高度H;于风机叶片下叶尖的正下方安装测距装置,检测风机叶片下叶尖处于最低点时的高度H1,并测量测距装置至风机塔架的距离L1;
步骤二,根据H和H1得出风机叶片下叶尖与侧净空雷达的垂直距离H2,根据L1得出净空值L2;
步骤三,根据H2和L2得出风机叶片下叶尖与侧净空雷达的距离L以及风机叶片下叶尖与侧净空雷达所在直线与竖直线的夹角A;
步骤四,调整侧净空雷达的姿态角,使净空雷达的测距值CL、测角值CA分别与L、A相等,进而完成对侧净空雷达1的姿态角的调试。
优选的,所述H2=H-H1,L2≈L1,L=(L2+H2)^(1/2),cosA=(H2^2+L2^2-L2^2)/(2*H2*L),A=arccosA。
优选的,所述步骤一中,以下叶尖位于最低点时于地面的投影为中心,多个测距装置于同一平面设置为测距阵列。
优选的,所述下叶尖在邻近最低点且由下行变为上行的过程中,所述测距阵列对下叶尖连续进行多测测距;
随后,分析测距阵列中所有测距装置的测量值,取合理范围内的最小测量值,并认定为H1。
优选的,取测量值为H1的测距装置,测量其与塔架的距离,并认定为L1。
优选的,所述测距阵列设置为长宽为400mm*400mm—600mm*600mm的矩形测距阵列;和\或
所述测距装置间隔80mm—120mm设置。
与现有技术相比,本发明的优点是:
(1)通过测距装置测出下叶尖与其地面投影点的距离,以及该投影点与塔架的距离,从而可以求得当前下叶片的净空值,进而对侧净空雷达的姿态角进行调整。此种标定方法成本低廉,且是对下叶尖进行直接测量,消除了中间误差,具有极高的精度。
(2)多个测距装置组成测距阵列,使得测量点更为接近下叶片尖端,防止因测距装置放置位置不准确导致激光照点偏离下叶尖,从而导致H1与下叶尖实际高度出现较大差距。
(3)测距装置在下叶尖下行转上行的过程中进行连续测距,防止下叶片并未运行至最低点时便进行测量,从而导致H1与下叶尖最低点时的实际高度出现较大差距。
(4)测量测距阵列中测量值为H1的激光测距仪与塔架的距离L1,从而使得该L1尽可能接近理想状态下的下叶尖的地面投影点与塔架的实际距离L2。
附图说明
下面结合附图及实施例对本发明做进一步描述:
图1和图2为本发明所述侧净空雷达、风机、测距阵列位置分布图;
图3为本发明所述侧净空雷达的标定方法示意图;
其中:1、侧净空雷达,2、测距阵列,3、下叶尖,4、塔架。
具体实施方式
下面结合具体实施例,对本发明的内容做进一步的详细说明:
如图1和图2所示,侧净空雷达1安装于机舱上,用于测量下叶尖3与侧净空雷达1的距离,以及叶片倾斜角度,从而得出当前下叶尖的净空值,并进行监控。而侧净空雷达测得正确净空值的前提是当前雷达处于正确的姿态角。如图3所示,本发明提供一种侧净空雷达1的标定方法,用于测量当前风机的净空值,并据此调整侧净空雷达的测量值与之相符,从而使得侧净空雷达处于正确的姿态角。
标定时选择能见度良好,风速五级,风向稳定的时段,并按如下步骤进行标定:
步骤一,已知测净空雷达在机舱上的安装高度H。于风机叶片下叶尖3的正下方安装测距装置,本实施例中,测距装置选择激光测距仪。并检测风机叶片下叶尖3处于最低点时的高度H1,同时,测量激光测距仪距离风机塔架4的距离L1。
在本实施例中,测量H1时,以下叶尖3位于最低点时于地面的投影为中心,将25个激光测距仪设置为500mm*500mm的矩形测距阵列2,其中,每个激光测距仪间隔100mm。并当下叶尖3运行至邻近最低点且由下行变为上行的过程中,测距阵列2中的所有激光测距仪对下叶尖3每隔2s进行一次测距。之后,分析所有激光测距仪的测量值,为避免激光测距仪受空中其他物体影响,在一个预设的合理范围内取最小测量值,并认定为H1。
同时,测量该激光测距仪与塔架4的距离,并将该距离认定为L1。
步骤二,通过H-H1得出风机叶片下叶尖3与侧净空雷达1的垂直距离H2,根据L1得出与于L1近似相等的风机净空值L2。
步骤三,根据H2和L2得出风机叶片下叶尖3与侧净空雷达1的距离L,具体为L=(L2+H2)^(1/2)。以及风机叶片下叶尖3与侧净空雷达1所在直线与竖直线的夹角A,具体为cosA=(H2^2+L2^2-L2^2)/(2*H2*L),A=arccosA。
步骤四,调整侧净空雷达1的姿态角,使净空雷达1的测距值CL、测角值CA分别与L、A相等,进而完成对侧净空雷达1的姿态角的调试。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明,因此无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
- 一种制导雷达机械轴与电轴对准的标定装置及标定方法
- 一种车载毫米波雷达安装位置的标定装置及其标定方法
- 一种激光净空雷达监测风机净空距离时的标定方法及辅助装置
- 一种激光净空雷达安装姿态的标定方法