信息处理装置、移动体、拍摄系统、拍摄控制方法及程序
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及信息处理装置、移动体、拍摄系统、拍摄控制方法及程序。
背景技术
已知有设置在工厂或仓库等的站点,并且能够在站点内自主地移动的机器人。这样的机器人例如作为检查机器人或服务机器人来使用,能够代替作业者进行站点内的设备的检查作业。在专利文献1中公开了一种监视系统,仅通过作业员沿着检查路径操作移动体就能够进行设备的仪器或管道等的监视检查。
另外,在使用机器人的检查作业中,已知有一边使机器人移动一边拍摄检查对象物的系统。在此,作为用于自动调整检查对象物的拍摄位置等的方法,专利文献2中公开的内容是,在一边使照相机依次移动到对工件设定的多个检查点,一边根据在各检查点拍摄工件来进行该工件的检查时,使用显示画面上的视点信息来示教多个检查点的位置。
引文列表
专利文献
专利文献1:日本特开平11-64050号公报
专利文献2:日本特开2005-52926号公报
发明内容
技术问题
但是,在以往的方法中,即使预先示教了拍摄条件,根据拍摄的时间或天气等的拍摄环境,即使是从相同的拍摄位置来拍摄,对象物被拍摄的状态也会不同,就存在着对于进行对象物的确认的管理员等来说,有可能获取了难以确认对象物的状态的拍摄图像的问题。
解决问题的方案
为了解决上述课题,技术方案1的发明涉及一种对在规定的站点内移动并拍摄对象物的移动体的拍摄处理进行控制的信息处理装置,其特征在于包括:存储单元,将所述对象物的拍摄条件与在特定的拍摄位置拍摄的设置在所述站点内的所述对象物且该对象物的映入状态为不同的多个基准图像的每一个相关联地进行存储;拍摄控制单元,使用移动到所述特定的拍摄位置的所述移动体,拍摄所述对象物,以及拍摄条件设定单元,根据所述对象物的拍摄图像和所存储的所述基准图像,设定所述对象物的拍摄条件,所述拍摄控制单元使用所设定的所述拍摄条件拍摄所述对象物。
本发明的效果
根据本发明获得的效果是能够与拍摄环境无关地获取可以确认对象物的状态的拍摄图像。
附图说明
图1所示是拍摄系统的整体构成的一个例示图。
图2所示是设置有机器人的对象站点的一例的概要说明图。
图3所示是机器人的移动路径的一例的概要说明图。
图4的(A)、(B)所示是拍摄位置不同时的检查对象物的状态的一个例示图。
图5所示是机器人的构成的概要的一个例示图。
图6所示是机器人的构成的概要的一个例示图。
图7所示是机器人的构成的概要的一个例示图。
图8所示是机器人的硬件构成的一个例示图。
图9所示是图像管理服务器和通信终端的硬件构成的一个例示图。
图10所示是拍摄系统的功能构成的一个例示图。
图11所示是区域信息管理表的一例的概念图。
图12所示是站点位置管理表的一例的概念图。
图13所示是路径信息管理表的一例的概念图。
图14所示是对象物管理表的一例的概念图。
图15所示是模式管理表的一例的概念图。
图16所示是拍摄条件管理表的一例的概念图。
图17所示是拍摄图像管理表的一例的概念图。
图18所示是对象物检查处理的一例的时序图。
图19所示是机器人中的对象物检查处理的一例的流程图。
图20所示是对象物拍摄处理的一例的流程图。
图21所示是对象物拍摄处理的一例的流程图。
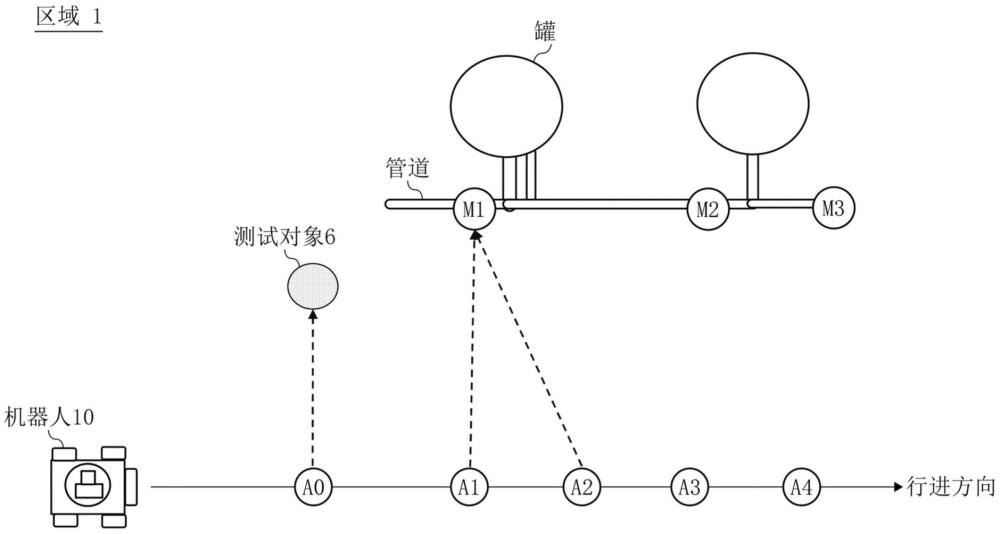
图22所示是在检查区域中使用机器人的拍摄处理的一例的概要说明图。
图23的(A)~(C)所示是测试对象的拍摄状态的一例的说明图。
图24的(A)、(B)所示是测试对象的一个例示图。
图25的(A)、(B)所示是测试对象的一个例示图。
图26所示是未登录拍摄条件时的对象物拍摄处理的一例的流程图。
图27所示是拍摄系统中的拍摄条件的登录处理的一例的时序图。
图28所示是设定画面的一个例示图。
图29所示是设定画面的一个例示图。
图30所示是拍摄系统中的拍摄条件的登录处理的一例的时序图。
图31所示是未登录拍摄条件时的对象物拍摄处理的一例的流程图。
图32所示是拍摄系统中的拍摄条件的登录处理的一例的时序图。
图33所示是图像选择画面的一个例示图。
图34所示是拍摄系统中的拍摄条件的登录处理的一例的时序图。
图35所示是在检查区域中使用机器人的拍摄处理的其他例的概要说明图。
图36的(A)所示是从拍摄点A3拍摄的拍摄图像的一个示例图,(B)所示是从拍摄点A4拍摄的拍摄图像的一个示例图。
具体实施方式
以下,参照附图来说明用于实施发明的方式。另外,在附图的说明中,对同一要素赋予相同的附图标记并省略重复的说明。
·实施方式·
·系统构成
图1所示是拍摄系统的整体构成的一个例示图。图1所示的拍摄系统1是使用机器人10对设置在对象站点里的检查对象物进行拍摄并进行是否有异常的检查的系统。
拍摄系统1包括位于规定的对象站点的机器人10、图像管理服务器50以及通信终端70。构成拍摄系统1的机器人10、图像管理服务器50以及通信终端70能够经由通信网络100来通信。通信网络100由因特网、移动通信网、局域网(LAN:Local Area Network)等构筑。另外,在通信网络100中,不仅是有线通信,也可以包含基于第三代(3G:3rdGeneration)、第四代(4G:4th Generation)、第五代(5G:5th Generation)、无线保真(Wi-Fi:Wireless Fidelity)(注册商标)、全球互通微波存取(WiMAX:WorldwideInteroperability for Microwave Access)或长期演进技术(LTE:Long Term Evolution)等的无线通信的网络。
机器人10是设置在对象站点并在对象站点内自主行走的移动体。机器人10一边在对象站点内移动,一边对所设置的检查对象物执行检查作业。另外,机器人10通过将由检查作业拍摄的拍摄图像向通信终端70发送,向使用通信终端70的对象站点的管理员提供检查结果的信息(图像等)。
图像管理服务器50是用于管理由机器人10拍摄的检查对象物的拍摄图像的服务器计算机。图像管理服务器50在存储并管理机器人10发送的拍摄图像的同时,向管理员使用的通信终端70提供拍摄图像。
另外,图像管理服务器50可以由一台计算机构筑,也可以由将各部(功能或单元)分割而任意分配的多台计算机构筑。此外,图像管理服务器50的全部或部分功能可以由存在于云环境中的服务器计算机或存在于就地部署环境中的服务器计算机来实现。
通信终端70是对设置在对象站点的检查对象物或机器人10进行管理的管理员所使用的笔记本PC(PersonalComputer)等的计算机。管理员在办公室等的管理站点中,通过阅览由机器人10拍摄的检查对象物的拍摄图像,进行检查作业的执行结果的确认。另外,管理员也能够一边观察显示在通信终端70上的对象站点的图像,一边进行机器人10的远程操作。另外,通信终端70不限于笔记本PC,例如也可以是台式PC、平板终端、智能手机或可佩戴式终端等。
·概要
这里,使用图2对设置有机器人10的对象站点进行说明。图2所示是设置有机器人10的对象站点的一例的概要说明图。图2所示是例如作为对象站点的工厂车间等场地面积大的室外的站点的例子。在图2所示的对象站点中,存在需要日常检查或定期检查等的维护管理的多个的检查对象物。例如,对象站点是工厂车间时,检查对象物是贮存罐的测量仪表(仪表1、仪表2)、贮存罐(罐1、罐2)、贮存罐的阀(阀1、阀2、阀3)、对贮存罐等进行输液作业的油罐等。
机器人10通过自主行走在对象站点内移动,并在规定的位置对检查对象物执行拍摄处理。另外,机器人10也可以使用线追踪等技术或来自通信终端70的远程操作在对象站点内移动。另外,在对象站点设置有与检查对象物不同的测试对象6。测试对象6是在进行对象站点中的检查对象物的拍摄之前,为了确认拍摄环境中的拍摄对象物的映入状态而拍摄的设置物。
在图2的例子中,机器人10对设置在对象站点的测试对象6进行拍摄,并将得到的图像与预先存储的不同拍摄环境下的基准图像进行对照。机器人10根据对照结果,从多个拍摄模式中特定一个拍摄模式,并设定与所特定的拍摄模式对应的机器人10的拍摄位置和拍摄方向。然后,机器人10在所设定的拍摄位置和拍摄方向上拍摄对象站点内的检查对象物。
图3所示是机器人10的移动路径的一例的概要说明图。机器人10的移动路径表示的是到如图3所示对象站点上的任意的站点位置(P0、P1、P2、…)依次指定的目的地的移动目的地为止的路线。对象站点上的任意的站点位置由表示对象站点的整体的地图数据上的坐标位置的XY坐标来表示。
另外,图3所示的对象站点以检查作业的单位来被分割为四个区域(区域1~区域4)。例如,要使机器人10向区域1移动时,移动路径就被设定为以作为区域1的区域基准位置的站点位置P8为目的地的路径(P0→P1→P2→P3→P4→P8)。
在工厂车间等的站点,由于因管道的液体或气体等的泄漏而可能发生重大的灾害,因此在日常检查或作业者进行的作业中,对管道的微小的泄漏、压力计等仪表、阀的开闭状态等进行检查的作业。另一方面,在大规模的工厂车间中,例如,一边超过1km的场地的情况也较多,对站点内的所有管道或仪表等检查对象物进行检查需要极其庞大的时间。因此,在检查作业中,已知有使用通过自动或作业者的操作,一边在站点内巡回一边对检查对象物进行拍摄的检查机器人的方法。
但是,以往的检查机器人是根据作业者事先设定(示教)的设定值那样的拍摄位置和拍摄方向对检查对象物进行拍摄。在这种情况下,例如,对于设置在室外的检查对象物,根据天气或时间等环境条件,外部光的照射情况会变化,即使是相同的拍摄位置和拍摄方向,由于光的反射程度,也存在着拍摄到可读性低的图像的问题。例如,如图4所示,作为检查对象物的仪表1由于外部光的反射而被阴影覆盖,有时会无法读取作为检查对象的仪表的值的情况(图4的(A))。另一方面,仪表1通过改变拍摄的角度来改变外部光的照射情况,就可能读取仪表的值(图4的(B))。
于是,拍摄系统1在对象站点的每个检查区域中设置能够检测太阳的位置或亮度等外部光条件的变化的测试对象6,并在开始检查区域中的检查之前,由移动型的机器人10拍摄测试对象6。另外,拍摄系统1根据拍摄了测试对象6的拍摄图像的分析结果,设定拍摄条件来显示在检查区域中设定的检查对象物的拍摄位置以及拍摄方向。然后,拍摄系统1使机器人10移动到所设定的拍摄位置,并按照所设定的拍摄方向进行检查对象物的拍摄。由此,拍摄系统1通过使用与因检查的时间或天气而变化的外部光条件等的拍摄环境对应的拍摄条件来拍摄检查对象物,即使是难以读取预先示教的拍摄条件下的图像的情况,也能够切实地读取检查对象物的状态。
这里,设置有机器人10的对象站点不限于工厂车间,例如也可以是企业、工地现场、变电站或其他室外的设施等。例如,如果作业人员在场地面积大的站点进行检查作业时,需要花费时间来完成所有的检查作业,或者需要由多个作业人员分担检查作业。于是,设置在对象站点的机器人10通过代替作业人员来进行以往由人工进行的作业,就能够提高作业效率。另外,对象站点不限于室外,也可以是室内的办公室、学校、车间、仓库、商业设施或其他设施等,只要是存在想要使机器人10承担以往由人工进行的作业的需求的站点即可。
·机器人的构成
接着,使用图5至图7说明机器人10的具体的构成。图5至图7所示是机器人10的构成的概要的一个例示图。
图5所示的机器人10具备框体11、横杆12、拍摄装置13、拍摄位置调整装置14、支撑部件15、用于移动机器人10的移动机构16(16a、16b)、GPS传感器17以及障碍物检测传感器18。其中,在框体11中内置有位于机器人10的躯干部分,并控制机器人10的处理或动作的控制装置30等。控制装置30是信息处理装置的一例。横杆12设置在机器人10的行进方向的前面的框体11上,具有作为机器人10碰撞时的缓冲材料的作用。另外,横杆12不仅可以设置在框体11的前面,也可以设置在侧面或后面。
拍摄装置13对位于设置有机器人10的站点的人物、物体或风景等被摄体进行拍摄来获取拍摄图像。拍摄装置13是数字单反照相机或小型数码相机等的能够获取平面图像(详细图像)的数码相机机(普通拍摄装置)。与通过拍摄装置13获取的拍摄图像相关的拍摄图像数据,经由通过通信管理服务器等服务器计算机确立的通信会话,向通信终端70发送。
拍摄位置调整装置14是用于调整拍摄装置13的拍摄方向(朝向)的可动装置。拍摄位置调整装置14通过旋转驱动来调整拍摄装置13的拍摄方向的同时,调整拍摄装置13中的拍摄的变焦量(倍率)。另外,拍摄装置13和拍摄位置调整装置14也可以设置为使拍摄装置13具备拍摄位置调整功能的一个装置。
另外,由拍摄装置13获取的拍摄图像可以是动态图像,也可以是静态图像,还可以是动态图像和静态图像的双方。另外,由拍摄装置13获取的拍摄图像也可以与图像数据一起包含音频数据。进一步地,拍摄装置13也可以是能够获取全天球(360°)全景图像的广角拍摄装置。广角拍摄装置例如是拍摄被摄体用来得到成为全天球(全景)图像的基础的两个半球图像的全天球拍摄装置。进一步地,广角拍摄装置例如也可以是能够获取具有规定值以上的视场角的广角图像的广角照相机或立体照相机等。即,广角拍摄装置是能够获取使用焦距比规定值短的透镜来拍摄的图像(全天球图像、广角图像)的拍摄机构。另外,机器人10也可以是具备多个拍摄装置13的构成。这时,作为拍摄装置13,机器人10可以是具有广角拍摄装置和能够拍摄由广角拍摄装置拍摄的被摄体的一部分来获取详细图像(平面图像)的普通拍摄装置的双方的构成。
另外,拍摄装置13也可以包括拍摄远红外线(红外光)的热影像装置、或拍摄近红外线(红外光)的红外线照相机等的特殊照相机。拍摄装置13为拍摄远红外线(红外光)的热影像装置时,能够获取检测出到对象物发出的远红外线的拍摄图像(热像仪),并能够根据该拍摄图像来识别对象物。另外,在拍摄装置13是拍摄近红外线(红外光)的红外线照相机的情况下,能够不受可见光波段的干扰光的影响地获取拍摄了对象物的拍摄图像(红外线图像),并能够根据该拍摄图像来识别对象物。
支撑部件15是用于在机器人10(框体11)上设置(固定)拍摄装置13和拍摄位置调整装置14的部件。支撑部件15既可以是固定在框体11上的竿等,也可以是固定于框体11的底座。
移动机构16是使机器人10移动的单元,由车轮、行走电机、行走编码器、转向电机以及转向编码器等构成。关于机器人10的移动控制,由于是现有的技术,因此省略详细的说明,但机器人10例如是从作为操作者的管理员(通信终端70)来接收行走指令,并由移动机构16基于接收到的行走指令来移动机器人10。另外,移动机构16也可以是双脚步行的足型或单轮的机构。另外,机器人10的形状不限于图4所示的车辆型,例如,也可以是双足步行的人型、模仿生物的形态、模仿特定的角色的形态等。
GPS传感器17是从GPS卫星接受GPS信号并检测机器人10的位置的自身位置检测机构。障碍物检测传感器18是检测机器人10移动时的周围的障碍物的检测传感器。障碍物检测传感器18例如是立体照相机、或搭载有以面状地配置有光电转换元件的区域传感器的照相机等的图像传感器、或飞行时间(TOF:Time Of Flight)传感器、光探测和测距(LIDAR:Light Detectionand Ranging)传感器或雷达传感器等的测距传感器。另外,自身位置检测机构不限于GPS传感器17,只要是能够通过任意的方式来检测自身的位置的方法即可。例如,自身位置检测机构也可以采用使用了LIDAR的即时定位与地图构筑(SLAM:Simultaneous Localizationand Mapping)或在行走路上铺设了磁带等的环境的情况下的磁感应。
在此,使用图6及图7,对机器人10的构成的变形例进行说明。图6所示的机器人10a具备多个拍摄装置13a(13a1、13a2、13a3、13a4、13a5)。多个拍摄装置13a在支撑部件15的上下方向上排列并安装。另外,如图7所示的机器人10b具备能够使拍摄装置13沿上下方向滑动的滑动装置14a。机器人10b通过使拍摄装置13能够沿着滑动装置14a在上下方向上移动,能够调整拍摄位置(高度)。
这样,机器人10通过具备机器人10a那样的多个拍摄装置13a,或设置机器人10b那样的能够使拍摄装置13在上下方向上滑动的滑动装置14a,也能够调整拍摄装置13(13a)的拍摄位置。
另外,机器人10除了上述构成以外,还可以具有能够检测机器人10周围的信息的各种传感器。各种传感器例如是气压计、温度计、光度计、人体传感器、气体传感器、臭气传感器或照度计等的传感器设备。另外,机器人10也可以具备进行移动以外的附加动作的可动臂。
·硬件构成
接着,使用图8和图9,对构成实施方式所涉及的日程登录系统的装置或终端的硬件构成进行说明。另外,图8和图9所示的装置或终端的硬件构成也可以根据需要追加或删除构成要件。
○机器人的硬件构成○
图8所示是机器人的硬件构成的一个例示图。机器人10包括用于控制机器人10的处理或动作的控制装置30。如上所述,控制装置30设置在机器人10的框体11的内部。另外,控制装置30也可以设置在机器人10的框体11的外部,或者也可以作为与机器人10不同的装置来设置。
控制装置30具备CPU(中央处理单元)301、ROM(只读存储器)302、RAM(随机存取存储器)303、HDD(硬盘驱动器)304、介质I/F(接口)305、输入输出I/F306、声音输入输出I/F307、网络I/F308、近距离通信电路309、近距离通信电路309的天线309a、外部设备连接I/F311、计时器312以及总线310。
CPU301进行机器人10整体的控制。CPU301是通过将存储在ROM302或HD(硬盘)304a等中的程序或数据读出到RAM303上并执行处理来实现机器人10的各功能的运算装置。
ROM302是一种即使关掉电源也能保持程序或数据的非挥发性的存储器。RAM303是作为CPU301的工作区域等来使用的挥发性的存储器。HDD304根据CPU301的控制,来控制对HD304a的各种数据的读出或写入。HD304a存储程序等的各种数据。介质I/F305控制对USB(通用串行总线)存储器、存储卡、光盘或闪存等的记录介质305a的数据的读出或写入(存储)。
输入输出I/F306是用于与各种外部机器等之间输入输出文字、数值、各种指令等的接口。输入/输出I/F306控制对LCD(液晶显示器)等的显示器306a的光标、菜单、窗口、字符或图像等的各种信息的显示。另外,显示器306a也可以是具备输入设备的触摸面板显示器。另外,输入输出I/F306除了显示器306a之外,例如也可以连接鼠标、键盘等输入设备。声音输入/输出I/F307是根据CPU301的控制来处理麦克风307a和扬声器307b之间的声音信号的输入输出的电路。麦克风307a是根据CPU301的控制来输入声音信号的内置型的集音设备的一种。扬声器307b是根据CPU301的控制来输出声音信号的重放设备的一种。
网络I/F308是经由通信网络100与其他设备或装置进行通信(连接)的通信接口。网络I/F308例如是有线或无线LAN等的通信接口。近距离通信电路309是NFC(近场通信)或Bluetooth(蓝牙,注册商标)等的通信电路。外部设备连接I/F311是用于将其他装置连接到控制装置30的接口。计时器312是具有时间测量功能的测量装置。计时器312可以是计算机的软件计时器。
总线310是用于将上述各构成要素电连接的地址总线或数据总线等,传送地址信号、数据信号以及各种控制信号等。CPU301、ROM302、RAM303、HDD304、介质I/F305、输入输出I/F306、声音输入输出I/F307、网络I/F308、近距离通信电路309、外部设备连接I/F311以及计时器312经由总线310相互连接。
进一步地,经由外部设备连接I/F311,在控制装置30中连接有驱动电机101、传动器102、加速度/方位传感器103、拍摄位置调整装置14、GPS(全球定位系统)传感器17、障碍物检测传感器18以及电池120。
驱动电机101根据来自CPU301的命令,旋转驱动移动机构16,使机器人10沿着地面移动。传动器102根据来自CPU301的命令使可动臂19变形。可动臂19具有能够进行机器人10的移动以外的附加动作的动作手段。在可动臂19上,例如在可动臂19的前端作为动作手段设有用于抓住零件等物体的手。机器人10通过使可动臂19旋转或变形,能够进行规定的作业(动作)。加速/方位传感器103是检测地磁的电磁罗盘、陀螺罗盘和加速度传感器等的传感器。电池120是向机器人10整体供给必要的电源的单元。
○图像管理服务器的硬件构成○
图9所示是图像管理服务器50的硬件构成的一个例示图。图像管理服务器50的各硬件构成用500号段的符号来表示。图像管理服务器50由计算机构筑,如图9所示,具有CPU501、ROM502、RAM503、HD504、HDD控制器505、显示器506、外部设备连接I/F508、网络I/F509、总线510、键盘511、指针设备512、DVD-RW(可重写光盘)驱动器514、介质I/F516以及计时器517。
其中,CPU501控制图像管理服务器50整体的动作。ROM502存储IPL(初始程序加载程序)等的用于CPU501的驱动的程序。RAM503作为CPU501的工作区域来使用。HD504存储程序等的各种数据。HDD控制器505根据CPU501的控制,控制对HD504的各种数据的读出或写入。显示器506显示光标、菜单、窗口、文字或图像等各种信息。另外,显示器506a也可以是具备输入设备的触摸面板显示器。外部设备连接I/F508是用于连接各种外部设备的接口。这种情况下的外部机器例如是USB存储器或打印机等。网络I/F509是利用通信网络100来进行数据通信的接口。总线510是用于电连接图9所示CPU501等的各构成元素的地址总线或数据总线等。
另外,键盘511是用于输入字符、数值、各种指令等而具有多个键的一种输入设备。指针设备512是进行各种指令的选择或执行、处理对象的选择或光标的移动等的一种输入设备。另外,输入设备不仅可以是键盘511和指针设备512,也可以是触摸面板或声音输入装置等。DVD-RW驱动器514控制的是对于作为可以装卸的存储介质一例的可重写光盘(CD-ROM)513的各种数据的读取或写入。另外,可装卸的记录介质不限于DVD-RW,也可以是DVD-R或Blu-ray(注册商标)Disc(蓝光盘)等。介质I/F516控制的是对闪存等记录介质515的数据的读出或写入(存储)。计时器517是具有时间测量功能的测量装置。计时器517可以是计算机的软件计时器。
○通信终端的硬件构成○
图9所示是通信终端70的硬件构成的一个例图。通信终端70的各硬件构成用括号内的700号段的符号来表示。通信终端70由计算机构筑,如图9所示,具有与图像管理服务器50相同的构成,因此省略各硬件构成的说明。另外,显示器706是显示部的一例。作为显示器706的显示部可以是连接到通信终端70的具有显示功能的外部装置。该情况下的显示部例如可以是IWB(Interactive White Board:电子黑板)等的外部显示器、或者是从作为外部装置来连接的PJ(Projector:投影仪)的图像所投影的被投影部(例如管理站点的天花板或墙壁等)。
另外,上述各程序是可安装的形式或可执行的形式的文件,也可以记录在计算机可读取的记录介质中进行流通。作为记录介质的例子,可以例举有CD-R(可录光盘)、DVD(数字通用光盘)、Blu-ray Disc、SD卡或USB存储器等。另外,记录介质可以作为程序产品(Program Product)向国内或国外提供。例如,控制装置30通过执行本发明涉及的程序来实现本发明涉及的拍摄控制方法。
·功能构成
接着,使用图10至图17对实施方式所涉及的拍摄系统1的功能构成进行说明。图10所示是拍摄系统1的功能构成的一个例示图。另外,图10所示是图1所示装置或终端中与后述的处理或动作相关联的构成。
○机器人(控制装置)的功能构成○
首先,使用图10,对控制机器人10的处理或动作的控制装置30的功能构成进行说明。控制装置30具有收发部31、判断部32、位置信息获取部33、移动目的地设定部34、移动控制部35、拍摄控制部36、图像对照部37、模式特定部38、拍摄条件设定部39、登录部41以及存储/读出部49。这些各部是通过图8所示各构成要件中的任意一个按照在RAM303上展开的控制装置用程序的来自CPU301的命令进行动作而实现的功能或发挥功能的手段。另外,控制装置30具有由图8所示的ROM302、HD304a或记录介质305a构筑的存储部3000。
收发部31主要通过CPU301对网络I/F308的处理来实现,并经由通信网络100与其他装置或终端之间进行各种数据或信息的收发。
判断部32通过CPU301的处理来实现,并进行各种判断。位置信息获取部33主要通过CPU301对外部设备连接I/F311的处理来实现,并获取由GPS传感器17检测到的表示机器人10的现在位置的位置信息。
移动目的地设定部34主要通过CPU301的处理来实现,对机器人10的移动目的地进行设定。移动目的地设定部34例如将用于移动到成为从通信终端70发送来的处理开始请求的对象的对象区域的移动路径设定为机器人10的移动目的地。移动控制部35主要通过CPU301对外部设备连接I/F311的处理来实现,通过驱动移动机构16来控制机器人10的移动。移动控制部35例如使机器人10向由移动目的地设定部34设定的移动目的地移动。
拍摄控制部36主要通过CPU301对外部设备连接I/F311的处理来实现,控制对拍摄装置13的拍摄处理。拍摄控制部36例如对拍摄装置13进行拍摄处理的指令。另外,拍摄控制部36例如获取通过拍摄装置13的拍摄处理而获取的拍摄图像。
图像对照部37主要通过CPU301的处理来实现,对存储在后述的模式管理DB3005(参照图15)中的基准图像和由拍摄控制部36获取的测试对象6的拍摄图像进行图像对照处理。基准图像是作为拍摄对象物的测试对象6的映入状态不同的图像。基准图像是在过去的检查作业中拍摄的测试对象6的图像,是因随拍摄时间或天气等的外部光条件的拍摄环境的不同测试对象6的映入状态为不同的图像。
模式特定部38主要通过CPU301的处理来实现,根据图像对照部37的对照结果,特定检查对象物的拍摄模式。拍摄模式是用于设定因检查对象物的映入状态的不同而不同的拍摄条件的模式。拍摄条件设定部39主要通过CPU301对拍摄位置调整装置14的处理来实现,并进行与通过模式特定部38特定的拍摄模式对应的拍摄控制部36的拍摄条件的设定。登录部41主要通过CPU301的处理来实现,进行针对与拍摄模式对应的检查对象物的拍摄条件的登录。
存储/读出部49主要通过CPU301的处理来实现,在存储部3000中存储各种数据(或信息),或从存储部3000读出各种数据(或信息)。
○区域信息管理表
图11所示是区域信息管理表的一例的概念图。区域信息管理表是用于管理表示按每个检查作业划分的对象站点的区域的区域信息的表。在存储部3000中,构筑有由图11所示的区域信息管理表构成的区域信息管理DB3001。
区域信息管理表管理的是与识别对象站点内的规定区域的区域ID和区域名、以及用于特定区域的位置的基准位置相关联的区域信息。其中,基准位置是机器人10为了特定对象站点内的区域而使用的位置信息。基准位置例如通过机器人10的行走路径上的两点的站点位置来特定。
○站点位置管理表
图12所示是站点位置管理表的一例的概念图。站点位置管理表是用于管理表示对象站点内的规定的站点位置的站点位置信息的表。在存储部3000中,构筑有由图12所示的站点位置管理表构成的站点位置管理DB3002。
站点位置管理表管理的是将识别对象站点内的规定的位置的站点位置ID、以及表示对象的站点位置的位置信息相关联的站点位置信息。站点位置管理表以规定的间隔来存储对象站点内的机器人10的行走路径上的多个位置。对象的站点位置的位置信息通过对表示对象站点整体的地图数据上的坐标位置进行显示的XY坐标来表示。机器人10根据使用站点位置信息所示的位置信息而设定的移动路径,向作为目的的移动目的地移动。
○路径信息管理表
图13所示是路径信息管理表的一例的概念图。路径信息管理表是用于管理表示机器人10在对象站点内移动时的移动路径的路径信息的表。在存储部3000中,构筑有由图13所示的路径信息管理表构成的路径信息管理DB3003。
路径信息管理表管理的是将识别机器人10的移动路径的路径ID、识别成为使用了作为对象的移动路径的移动目的地的区域的区域ID、以及表示具体的移动路径的内容的路径数据建立了关联的路径信息。其中,路径数据将以对象区域为目的地的机器人10的移动路径表示为以规定的间隔来设置的站点位置的站点位置ID的顺序。
○对象物管理表
图14所示是对象物管理表的一例的概念图。对象物管理表是用于管理对象站点内的检查对象物的信息的表。在存储部3000中,构筑有由图14所示的对象物管理表构成的对象物管理DB3004。
对象物管理表按照识别对象站点内的检查区域的区域ID,将识别存在于成为对象的区域中的检查对象物的对象物ID以及对象物名相关联地进行管理。另外,在检查对象物为测试对象6的情况下(对象物ID“S1”),对象物管理表将表示测试对象6的拍摄位置的位置信息与表示测试对象6的对象物ID及对象物名相关联地进行管理。
○模式管理表
图15所示是模式管理表的一例的概念图。模式管理表是用于管理根据测试对象6的拍摄图像来确定的检查对象物的拍摄模式的表。在存储部3000中,构筑有由如图15所示的模式管理表构成的模式管理DB3005。
模式管理表将识别拍摄模式的模式ID和模式名、以及与对象的拍摄模式对应的基准图像数据关联起来进行管理。每当在检查作业中拍摄测试对象6时,作为与拍摄时的拍摄环境对应的拍摄模式,机器人10将测试对象6的拍摄图像作为基准图像数据随时存储。
○拍摄条件管理表
图16所示是拍摄条件管理表的一例的概念图。拍摄条件管理表是用于管理针对每个拍摄模式的检查对象物的拍摄条件的表。在存储部3000中构筑有由图16所示的拍摄条件管理表构成的拍摄条件管理DB3006。
拍摄条件管理表按照识别对象站点内的规定的区域的每个区域ID,将识别模式的模式ID、识别成为拍摄对象的检查对象物的对象物ID以及表示针对检查对象物的拍摄条件的拍摄条件信息关联起来进行管理。其中,拍摄条件信息包括表示检查对象物的拍摄位置的拍摄位置信息、以及表示拍摄装置13的拍摄方向的拍摄方向信息。
拍摄位置信息表示进行检查对象物的拍摄时的机器人10的停止位置。拍摄位置信息包括表示机器人10停止的站点位置的拍摄点信息或表示距对象区域的区域基准位置的站点的基准位置距离信息。拍摄点信息与站点位置信息同样地,通过对表示对象站点整体的地图数据上的坐标位置进行显示的XY坐标来表示。另一方面,基准位置距离信息通过离开机器人10的行走路径上的区域基准位置的距离来表示。另外,拍摄位置信息只要包含拍摄点信息和基准位置距离信息中的任一个即可。另外,拍摄条件信息不仅包含拍摄位置信息及拍摄方向信息,也可以包含拍摄装置13中的光圈(F值)、快门速度、ISO灵敏度或闪光灯的有无等的拍摄时的参数的信息。进一步地,拍摄条件信息也可以包含与上述特殊照相机等的拍摄装置13的种类对应的特有的拍摄参数。
另外,拍摄方向信息包含用于特定拍摄装置13的拍摄方向的PTZ(全方位移动及变倍、变焦)的参数。拍摄条件设定部39例如根据拍摄方向信息所示的参数,通过控制拍摄位置调整装置14,来设定拍摄装置13的拍摄条件。然后,拍摄控制部36根据由拍摄条件设定部39设定的拍摄条件,对检查对象物进行拍摄。
○图像管理服务器的功能构成○
接下来,使用图10说明图像管理服务器50的功能构成。图像管理服务器50具有收发部51、判断部52以及存储/读出部59。这些各部是通过图9所示各构成要件中的任意一个按照在RAM503上展开的图像管理服务器用程序的来自CPU501的命令进行动作而实现的功能或发挥功能的手段。另外,图像管理服务器50具有由图9所示的ROM502、HD504或记录介质515构成的存储部5000。
收发部51主要通过CPU501对网络I/F509的处理来实现,并与其他装置或终端之间进行各种数据或信息的收发。判断部52通过CPU501的处理来实现,并进行各种判断。
存储/读出部59主要通过CPU501的处理来实现,在存储部5000中存储各种数据(或信息),或从存储部5000读出各种数据(或信息)。
○拍摄图像管理表
图17所示是拍摄图像管理表的一例的概念图。拍摄图像管理表是用于管理由机器人10拍摄的检查对象物的拍摄图像的表。在存储部5000中构筑有由图17所示的图像管理表构成的拍摄图像管理DB5001。
拍摄图像管理表按照识别对象站点内的检查区域的区域ID,将识别检查对象物的对象物ID和对象物名、以及对象的检查对象物的拍摄图像数据关联起来进行管理。
○通信终端的功能构成○
接着,使用图10说明通信终端70的功能构成。通信终端70具有收发部71、受理部72、显示控制部73、判断部74以及存储/读出部79。这些各部是通过图9所示各构成要件中的任意一个按照在RAM703上展开的通信终端用程序的来自CPU701的命令进行动作而实现的功能或发挥功能的手段。另外,通信终端70具有由图9所示的ROM702、HD704或记录介质715构筑的存储部7000。
收发部71主要通过CPU701对网络I/F708的处理来实现,并经由通信网络100与其他装置或终端之间进行各种数据或信息的收发。
受理部72主要通过CPU701对键盘711或指针设备712的处理来实现,并受理来自利用者的各种选择或输入。显示控制部73主要通过CPU701的处理来实现,使显示器706等的显示部显示各种画面。判断部74通过CPU701的处理来实现,并进行各种判断。
存储/读出部79主要通过CPU701的处理来实现,在存储部7000中存储各种数据(或信息),或从存储部7000读出各种数据(或信息)。
·实施方式的处理或动作
○对象物拍摄处理○
接着,使用图18至图36来说明实施方式所涉及的拍摄系统1的处理或动作。首先,使用图18至图2来说明使用机器人10拍摄对象区域内的检查对象物的处理。图18所示是对象物检查处理的一例的时序图。
首先,通过位于管理站点的管理员A对通信终端70的输入设备进行输入操作等,通信终端70的收发部71对图像管理服务器50发送表示请求开始对机器人10的检查作业的处理开始请求(步骤S11)。该处理开始请求包含识别请求对象的检查作业的对象区域的区域ID。由此,图像管理服务器50的收发部51接收从通信终端70发送的处理开始请求。
接着,图像管理服务器50的收发部51对机器人10发送(传送)从通信终端70发送来的处理开始请求(步骤S12)。由此,机器人10所具备的控制装置30的收发部31接收从图像管理服务器50发送(传送)来的处理开始请求。接着,机器人10根据接收到的处理开始请求,开始对检查对象物的检查处理(步骤S13)。这里,使用图19至图25来详细说明机器人10对检查对象物的检查处理。图19所示是机器人10中的对象物检查处理的一例的流程图。
首先,存储/读取部49通过将步骤S12中接收到的区域ID作为搜索关键字来搜索区域信息管理DB3001(参见图11),从而读取与接收到的区域ID为相同的区域ID相关联的区域信息(步骤S31)。另外,存储/读取部49通过将步骤S12中接收到的区域ID作为搜索关键字来搜索路径信息管理DB3003(参见图13),从而读取与接收到的区域ID为相同的区域ID相关联的路径信息(步骤S32)。进一步地,存储/读出部49读出存储在站点位置管理DB3002(参照图12)中的站点位置信息(步骤S33)。
接着,移动目的地设定部34根据在步骤S32中读出的路径信息,设定机器人10的移动目的地(步骤S34)。具体而言,移动目的地设定部34使用由位置信息获取部33获取的表示机器人10的当前位置的位置信息、和读出的路径信息所示的路径数据,按照路径数据所示的站点位置的顺序来设定成为机器人10的移动目的地的移动路径。移动目的地设定部34例如在想要使机器人10向区域1移动的情况下,设定以作为区域1的区域基准位置的站点位置P8为目的地的移动路径(P0→P1→P2→P3→P4→P8)。
接着,移动控制部35按照由移动目的地设定部34设定的移动路径,使机器人10移动(步骤S35)。具体而言,移动控制部35以依次按照所设定的移动路径所示的站点位置的方式,来使机器人10移动。然后,当机器人10到达了指定区域时(步骤S36的是),判断部32使处理转换到步骤S36。具体而言,在由位置信息获取部33获取的位置信息所表示的机器人10的当前位置与在步骤S31中读出的区域信息所示的区域基准位置一致或者接近了区域基准位置的情况下,判断部32就判断为机器人10到达了指定区域。另一方面,到机器人10到达指定区域为止,控制装置30通过移动控制部35使机器人10移动(步骤S36的否)。
接着,控制装置30执行指定区域中的检查对象物的拍摄处理(步骤S37)。然后,控制装置30基于在步骤S11中接收到的区域ID,在由判断部32判断为存在其他指定区域的情况下(步骤S38的“是”),重复步骤S36开始的处理,并重复向其他指定区域的移动以及拍摄处理。另一方面,控制装置30在由判断部32判断为不存在其他指定区域的情况下(步骤S38的否),结束对检查对象物的检查处理。
这里,使用图20至图25,对步骤S37中的检查对象物的拍摄处理进行详细说明。图20和图21所示是对象物拍摄处理的一个流程图例。另外,机器人10在步骤S36中到达指定区域后,也继续按照由移动目的地设定部34设定的移动路径进行移动。
首先,存储/读出部49将在步骤S35中判断为已到达的指定区域的区域ID作为检索关键字,通过检索对象物管理DB3004(参照图14),来读出与对象的区域ID为相同的区域ID相关联的对象物信息(步骤S51)。
随后,当判断为机器人10到达了测试点时(步骤S36的是),判断部32使处理转换到步骤S53。测试点是测试对象6的拍摄位置。具体而言,在由位置信息获取部33获取的位置信息所表示的机器人10的当前位置与在步骤S51中读出的对象物信息所示的测试点一致或者接近了测试点的情况下,判断部32就判断为机器人10到达了测试点。另一方面,到机器人10到达测试点为止,控制装置30通过移动控制部35使机器人10移动(步骤S52的否)。
接着,在到达测试点的情况下,移动控制部35使机器人10停止(步骤S53)。然后,拍摄控制部36对测试对象6进行拍摄处理,并获取拍摄了测试对象6的拍摄图像(步骤S54)。
接着,图像对照部37对存储在模式管理DB3005(参照图15)中的基准图像数据和在步骤S54中获取的测试对象物6的拍摄图像进行图像对照处理(步骤S55)。具体而言,图像对照部37例如计算所存储的多个基准图像数据与所获取的拍摄图像之间的一致度或类似度等的参数,并从多个基准图像数据中决定计算出的参数为最高的基准图像。即,图像对照部37使用测试对象6的拍摄图像,决定基于拍摄时的外部光条件等的测试对象6的映入状态为最接近的基准图像。
接着,模式特定部38将与在步骤S55中决定的基准图像相关联的拍摄模式作为针对检查对象物的拍摄模式来特定(步骤S56)。具体而言,模式特定部38例如在模式管理DB3005中,特定与在步骤S55中决定的基准图像相关联的拍摄模式的模式ID。机器人10在每个检查区域中根据拍摄环境存储有多个被判断为检查对象物容易看到的拍摄模式,并根据即将开始对检查对象物的拍摄之前拍摄的测试对象6的映入状态,来特定检查对象物被判断为最容易看到的拍摄模式。
接着,存储/读出部49通过将在步骤S57中特定的拍摄模式的模式ID作为检索关键字来检索拍摄条件管理DB3006(参照图16),读出与对象的模式ID为相同的模式ID相关联的拍摄条件信息(步骤S57)。
接着,在图21中,移动控制部35使机器人10移动到在步骤S57中读出的拍摄条件信息所示的拍摄位置(步骤S58)。在拍摄条件信息所包含的拍摄位置信息表示拍摄点的情况下,移动控制部35使机器人10移动到拍摄点信息所表示的站点位置。另外,例如在拍摄条件信息所包含的拍摄位置信息表示基准位置距离信息的情况下,使机器人10仅移动基准位置距离信息所表示的距离。
然后,当机器人10到达了拍摄位置时(步骤S59的是),判断部32使处理转换到步骤S61。具体而言,在由位置信息获取部33获取的位置信息所表示的机器人10的当前位置与在步骤S57中读出的拍摄条件信息所示的拍摄位置一致或者接近了拍摄位置的情况下,判断部32就判断为机器人10到达了拍摄位置。另一方面,到机器人10到达拍摄位置为止,控制装置30通过移动控制部35使机器人10移动(步骤S59的否)。
接着,拍摄条件设定部39进行与到达的拍摄位置对应的拍摄条件的设定(步骤S60)。具体而言,拍摄条件设定部39根据在步骤S57中读出的拍摄条件信息所表示的拍摄方向信息,通过控制拍摄位置调整装置14,来设定拍摄装置13的拍摄条件。然后,拍摄控制部36根据在步骤S60中设定的拍摄条件,进行成为当前的拍摄位置中的拍摄对象的检查对象物的拍摄处理(步骤S61)。
接着,控制装置30在存在成为拍摄对象的其他检查对象物的情况下(步骤S62的是),反复步骤S59开始的处理,并使机器人10移动到其他检查对象物的拍摄位置。另一方面,在判断部32判断为不存在成为拍摄对象的其他检查对象物的情况下(步骤S62的否),结束处理。
这里,使用图22,概要地说明图20和图21中说明的处理。图22所示是在检查区域中使用机器人10的拍摄处理的一例的概要说明图。
在机器人10到达进行检查作业的对象区域的情况下,首先,机器人10移动到作为测试对象6的拍摄位置的测试点A0。然后,机器人10在测试点A0处对测试对象6进行拍摄处理。由此,机器人10获取拍摄了当前的对象站点的环境下的测试对象6的拍摄图像。
接着,机器人10将测试对象6的拍摄图像与存储在模式管理DB3005中的基准图像进行对照,并特定本次检查作业中的检查对象物的拍摄模式。然后,机器人10设定存在于与所特定的拍摄模式对应的对象区域中的检查对象物的拍摄条件。
然后,机器人10移动到所设定的拍摄条件所示的拍摄位置,进行检查对象物的拍摄处理。在图16所示的例子中,例如,检查对象物M1的拍摄位置在模式ID“P001”的情况下是拍摄位置A1,在模式ID“P002”的情况下是拍摄位置A2。由此,机器人10根据拍摄时的拍摄环境,使用判断为检查对象物最容易看到的拍摄条件来进行检查对象物的拍摄,由此能够获取可以确认检查对象物的状态的拍摄图像。
另外,使用图23至图25,对设置于对象站点的各检查区域的测试对象6进行说明。图23所示是测试对象6的拍摄状态的一例的说明图。图23所示是根据太阳光照射的方向的球体的测试对象6的拍摄状态的差异。
如图23的(A)~(C)所示,拍摄有测试对象6的拍摄图像因为照射到测试对象6的太阳光的方向而具有不同的反射方式。图23的(A)是太阳光从左上部照射的例子,测试对象6由于左侧被太阳光照射而成为难以看到的状态,所以从稍微右侧来看的话容易看到。图23的(B)是太阳光从正面照射到测试对象6的例子,测试对象6由于中央附近被太阳光照射而成为难以看到的状态,所以在左右方向上带有角度地看就容易看到。进一步地,图23的(C)是太阳光从右上部照射到测试对象6的例子,测试对象6由于右上部被太阳光照射而成为难以看到的状态,所以稍微在左侧上带有角度地看就容易看到。
这样,拍摄系统1在检查区域中配置测试对象6作为用于设定拍摄条件的参考,并在进行检查对象物的拍摄之前拍摄测试对象6,根据太阳光的照射方式等引起的测试对象6的映入状态的不同,来设定检查对象物的拍摄条件。由此,拍摄系统1能够获取通过机器人10来更容易地确认检查对象物的状态的拍摄图像。
进一步地,如图24及图25所示,设置于对象站点的测试对象6并不限于圆形物体,亦可为各种形状。例如,测试对象6可以是如图24的(A)所示的圆柱形状或如图24的(B)所示的多边形形状的物体。
此外,如图25的(A)所示,测试对象6可以是例如棒状的物体,并且可以使用棒状的物体的阴影来特定拍摄状态的差异。进一步地,如图25的(B)所示,例如,测试对象6也可以是包括比色图表的图像,通过对所拍摄的比色图表进行白平衡调整等的色温的补正,来特定拍摄模式。
另外,本实施方式说明了测试对象6与检查对象物分别设置在每个检查区域中的情况,但拍摄系统1也可以是将设置在检查区域中的多个检查对象物中的一个检查对象物作为测试对象6来处理的构成。在本实施例中,测试对象6是第1对象物的一例。另外,设置在对象站点的各检查区域中的检查对象物是第2对象物的一例。
进一步地,拍摄系统1也可以基于拍摄有检查对象物的拍摄图像和基准图像来设定拍摄条件,并对同一检查对象物以所设定的拍摄条件来拍摄的构成。这时,在上述的对象物拍摄处理中,省略图21所示的步骤S58和步骤S59的处理,拍摄系统1对与在步骤S54中拍摄的检查对象物为相同的检查对象物进行步骤61的拍摄处理。
返回到图18,控制装置30的收发部31向图像管理服务器50发送通过步骤S13的检查处理获取的拍摄图像数据、以及与拍摄图像数据对应的检查对象物的对象物信息(步骤S14)。由此,图像管理服务器50的收发部51接收从机器人10发送的拍摄图像数据和对象物信息。然后,图像管理服务器50的存储/读出部59将接收到的拍摄图像数据与在步骤S11中接收到的区域ID、以及在步骤S14中接收到的对象物信息所表示的对象物ID和对象物名相关联地存储在拍摄图像管理DB5001(参照图17)中(步骤S15)。
管理站点的管理员通过使通信终端70显示通过上述对象物检查处理获取并存储在图像管理服务器50中的拍摄图像,能够确认检查对象物的状态。由上述的拍摄条件管理DB3006(参照图16)管理的拍摄条件被设定为用于获取进行拍摄图像的确认的管理员容易看到检查对象物的状态的拍摄图像的参数。
另外,机器人10也可以在进行上述那样的检查对象物的拍摄处理的同时,使用对拍摄图像的图像识别等的方法,来进行所拍摄的检查对象物有无异常等的检测处理。由此,与检查对象物的拍摄图像一起,管理员能够确认由机器人10进行的检查对象物的异常发生等的检测结果。这时,由拍摄条件管理DB3006(参照图16)管理的拍摄条件也可以不是用于获取管理员容易看到的状态的图像的参数,而是设定为能够由机器人10进行图像识别等处理的范围的参数。
○拍摄模式的登录处理○
○机器人10的检查作业中的在线处理
接着,使用图26至图36来说明对检查对象物的拍摄所使用的拍摄模式进行登录的处理。在上述的对象物检查处理中,说明了预先在拍摄条件管理DB3006(参照图16)中存储有与不同的模式对应的拍摄条件的例子,但图26至图36所示的是在拍摄对象物时拍摄模式没有存储而是使管理员阅览拍摄有检查对象物的拍摄图像来登录期望的条件的情况下的例子。另外,在以下的说明中,机器人10到达对象的检查区域为止的处理与图18所示的处理相同,因此省略说明。
图26所示是未登录拍摄条件时的对象物拍摄处理的一个流程图例。步骤S101~步骤S104的处理与图20所示的步骤S51~步骤S54的处理相同,因此省略说明。
在步骤S105中,/读存储取部49将在步骤S104中拍摄的测试对象6的拍摄图像作为基准图像数据存储到模式管理DB3005(参见图15)中。这时,存储/读取部49将测试对象6的拍摄图像数据与新赋予的模式ID相关联地存储到模式管理表的一条记录中。
接着,移动控制部35按照由移动目的地设定部34设定的移动路径,使机器人10向检查区域中的任意的拍摄位置移动(步骤S106)。具体而言,移动目的地设定部34将所设定的移动路径上的多个站点位置设定为任意的拍摄位置。然后,移动控制部35使机器人10向所设定的任意的拍摄位置移动。
接着,判断部32在机器人10到达了对象的拍摄位置的情况下(步骤S107的“是”),使处理转换到步骤S108。具体而言,在由位置信息获取部33获取的位置信息所表示的机器人10的当前位置与在步骤S106中设定的拍摄位置一致或者接近了拍摄位置的情况下,判断部32就判断为机器人10到达了对象的拍摄位置。另一方面,到机器人10到达对象的拍摄位置为止,控制装置30通过移动控制部35使机器人10移动(步骤S107的否)。
接着,拍摄控制部36对检查对象物进行低倍率的拍摄处理(步骤S108)。具体而言,拍摄条件设定部39在到达的拍摄位置中,设定变焦量(Z)低的低倍率的拍摄条件,来一次拍摄检查区域中的多个检查对象物。拍摄控制部36基于所设定的拍摄条件,进行低倍率的拍摄处理。然后,拍摄控制部36获取拍摄有检查区域中的多个检查对象物的拍摄图像即俯瞰图像。
接着,控制装置30在由判断部32判断为存在下一个拍摄位置的情况下(步骤S109的“是”),重复步骤S106开始的处理,并重复向下一个拍摄位置的移动及拍摄处理。另一方面,控制装置30在由判断部32判断为不存在下一个拍摄位置的情况下(步骤S109的否),就结束检查对象物的拍摄处理。
由此,机器人10通过从不同的拍摄位置来拍摄存在于检查区域的检查对象物,获取检查对象物的映照方式不同的多个俯瞰图像。接着,使用图27至图30,对使用由机器人10获取的拍摄图像来登录检查对象物的拍摄条件的处理进行说明。
图27及图30所示是拍摄系统中的拍摄条件的登录处理的一例的时序图。机器人10所具备的控制装置30的收发部31对图像管理服务器50发送在步骤S108中获取的拍摄图像数据(步骤S121)。图像管理服务器50的收发部51对通信终端70发送(传送)从机器人10发送来的拍摄图像数据(步骤S122)。由此,通信终端70的收发部71接收从图像管理服务器50发送(传送)来的拍摄图像数据。
接着,通信终端70的显示控制部73在显示器706上显示用于对检查对象物进行拍摄条件的设定的设定画面600(步骤S123)。图28所示是在通信终端中显示的设定画面的一个例示图。图28所示的设定画面600是使用拍摄了整个检查区域的俯瞰图像来用于进行检查区域内的检查对象物的拍摄条件的登录的显示画面。管理员A使用设定画面600,进行对所显示的拍摄图像的规定区域进行拍摄的情况下的拍摄条件的设定。
设定画面600包括拍摄图像显示区域605来显示对应于在步骤S122中接收到的拍摄图像数据的拍摄图像610,以及指定范围620来指定在拍摄图像显示区域605中显示的拍摄图像610内的规定区域。另外,设定画面600包括在请求拍摄与指定范围620对应的检查对象物时按下的“拍摄”按钮631、在显示指定范围620时按下的“范围指定”按钮633,以及将在拍摄图像显示区域605中显示的拍摄图像的拍摄条件作为拍摄模式来登录时按下的“登录”按钮635。进一步地,设定画面600包括对在拍摄图像显示区域605中显示的拍摄图像610进行切换的图像切换按钮641、用于输入要登录的拍摄模式的模式名的登录名输入区域643,以及用于输入在拍摄图像显示区域605中显示的拍摄图像的文件名的文件名输入区域645。
返回图27,在管理员A使用指定范围620进行区域指定并按下了“拍摄”按钮631的情况下,通信终端70的受理部72受理针对指定区域的拍摄请求(步骤S124)。然后,收发部71向图像管理服务器50发送表示在步骤S124中指定的拍摄图像610内的规定区域的指定区域信息(步骤S125)。图像管理服务器50的收发部51对机器人10发送(传送)从通信终端70发送来的指定区域信息。由此,机器人10所具备的控制装置30的收发部31接收从图像管理服务器50发送(传送)来的指定区域信息。
接着,控制装置30的拍摄条件设定部39基于在步骤S126中接收到的指定区域信息,来设定使用了拍摄装置13的拍摄处理的拍摄条件(步骤S127)。具体而言,拍摄条件设定部39根据与接收到的指定区域信息对应的区域的检查对象物的位置和朝向,来特定成为对象的检查对象物的拍摄位置和拍摄方向。然后,拍摄条件设定部39通过朝向所特定的拍摄方向来控制拍摄位置调整装置14,设定拍摄装置13的拍摄条件。另外,移动目的地设定部34将所特定的拍摄位置设定为机器人10的移动目的地。
接着,移动控制部35使机器人10向所设定的拍摄位置移动(步骤S128)。然后,拍摄控制部36在到达所设定的拍摄位置的情况下,基于所设定的拍摄条件,进行检查对象物的拍摄处理(步骤S129)。然后,拍摄控制部36获取与所指定的规定区域对应的拍摄有检查对象物的拍摄图像即放大图像。
收发部31对图像管理服务器50发送在步骤S128中拍摄的检查对象物的拍摄图像数据、以及所拍摄的检查对象物的对象物信息(步骤S130)。图像管理服务器50的收发部51对通信终端70发送(传送)从机器人10发送来的拍摄图像数据及对象物信息(步骤S131)。由此,通信终端70的收发部71接收从图像管理服务器50发送(传送)来的拍摄图像数据及对象物信息。
接着,如图29所示,通信终端70的显示控制部73将对应于在步骤S131中接收到的拍摄图像数据的拍摄图像615显示到拍摄图像显示区域605中(步骤S132)。在图29所示的设定画面600中,成为图28的指定范围620的放大图像的拍摄图像615显示在拍摄图像显示区域605中。
接着,在图30中,在拍摄图像显示区域605中显示拍摄图像615的状态下,通过管理员A按下“登录”按钮635,受理部72受理拍摄条件的登录请求(步骤S133)。另外,管理员在通过所显示的拍摄图像615难以确认检查对象物的状态的情况下,再次进行指定范围620的选择,变更机器人10的拍摄位置。这时,拍摄系统1重复从步骤124开始的处理。
接着,收发部71对图像管理服务器50发送在拍摄图像显示区域605中显示的拍摄图像615的拍摄条件的登录请求(步骤S134)。该拍摄条件登录请求包含设置有检查对象物的检查区域的区域ID、输入到文件名输入区域645中的文件名、输入到登录名输入区域643中的模式名、以及在步骤S131中接收到的对象物信息所示的对象物ID。由此,图像管理服务器50的收发部51接收从通信终端70发送的拍摄条件登录请求。
接着,图像管理服务器50的存储/读出部59将在步骤S131中接收到的拍摄图像数据与在步骤S134中接收到的区域ID和对象物ID相关联地存储到拍摄图像管理DB5001(参照图17)中(步骤S135)。然后,图像管理服务器50的收发部51向机器人10发送拍摄条件登录请求(步骤S136)。该拍摄条件登录请求包含在步骤S134中接收到的模式名以及对象物ID。由此,机器人10所具备的控制装置30的收发部31接收从图像管理服务器50发送来的拍摄条件登录请求。
控制装置30的登录部41将在步骤S136中接收到的模式名与在步骤S105中存储的基准图像数据关联起来的模式信息登录到模式管理DB3005(参照图15)中(步骤S137)。然后,登录部41将表示步骤S129中的拍摄处理的拍摄条件的拍摄条件信息与在步骤S136中接收到的对象物ID和在步骤S137中登录的模式信息所示的模式ID相关联地登录到拍摄条件管理DB3006(参照图16)中(步骤S138)。
如此,拍摄系统1能够将拍摄有测试对象6的拍摄图像和与检查对象物的拍摄时的拍摄环境对应的拍摄条件相关联地进行登录。另外,拍摄系统1通过反复进行在外部光条件等不同的拍摄环境下的上述的拍摄条件的登录处理,能够登录容易看到与各种拍摄环境分别对应的检查对象物的拍摄条件。
○机器人10的检查作业后的离线的处理
接着,使用图31至图34,说明在机器人10的检查作业完成后管理员A使用拍摄图像来登录拍摄模式的处理。机器人10将通过检查作业拍摄到的检查对象物的拍摄图像上传到图像管理服务器50。然后,管理员A在期望的时间里一边确认上传到图像管理服务器50的拍摄图像,一边进行登录检查对象物的拍摄模式的处理。以下进行详细的说明。
图31所示是未登录拍摄条件时的对象物拍摄处理的一个流程图例。图31所示的处理与图26所示的处理相比,仅是步骤S208的处理不同。在步骤S208中,拍摄控制部36进行针对检查对象物的放大图像的拍摄处理。具体而言,拍摄条件设定部39在到达的拍摄位置中,设定变焦量(Z)的高倍率的拍摄条件,来拍摄检查区域中的各检查对象物的放大图像。拍摄控制部36基于所设定的拍摄条件,进行存在于对象的检查区域中的检查对象物的拍摄处理。然后,拍摄控制部36获取分别拍摄有检查区域中的各个检查对象物的拍摄图像即放大图像。另外,图31所示的其他步骤S201~步骤S207以及步骤S209的处理分别与图26的步骤S101~步骤S107以及步骤S109的处理相同,因此省略说明。
接着,使用图32至图34,说明在机器人10的检查作业完成后,使用上传到图像管理服务器50的拍摄图像来登录检查对象物的拍摄条件的处理。图32及图34所示是拍摄系统1中的拍摄条件的登录处理的一例的时序图。机器人10所具备的控制装置30的收发部31向图像管理服务器50发送在步骤S208中获取的拍摄图像数据、以及在步骤S208中拍摄的设置有检查对象物的检查区域的区域ID和检查对象物的对象物信息(步骤S221)。由此,图像管理服务器50的收发部51接收从机器人10发送的拍摄图像数据、区域ID和对象物信息。然后,图像管理服务器50的存储/读出部59将接收到的拍摄图像数据与在步骤S221中接收到的区域ID、以及对象物信息所表示的对象物ID和对象物名相关联地存储在拍摄图像管理DB5001(参照图17)中(步骤S222)。
接着,通过位于管理站点的管理员A对通信终端70的输入设备进行输入操作等,通信终端70的收发部71对图像管理服务器50发送表示请求获取拍摄有检查对象物的拍摄图像的内容的拍摄图像获取请求(步骤S223)。该拍摄图像获取请求包含识别检查对象物的对象物ID。由此,图像管理服务器50的收发部51接收从通信终端70发送的拍摄图像获取请求。
接着,图像管理服务器50的存储/读出部59通过将在步骤S223中接收到的对象物ID作为检索关键字来检索拍摄图像管理DB5001,读出与接收到的对象物ID为相同的对象物ID关联后的拍摄图像数据(步骤S224)。然后,收发部51向请求源的通信终端70发送在步骤S224中读出的拍摄图像数据。由此,通信终端70的收发部71接收从图像管理服务器50发送来的拍摄图像数据。
接着,通信终端70的显示控制部73将显示有在步骤S224中接收到的拍摄图像数据的图像选择画面800显示到显示器706上(步骤S226)。图33所示是在通信终端中显示的图像选择画面的一个例示图。图29所示的图像选择画面800是使用拍摄有检查对象物的多个拍摄图像,用于进行与拍摄环境对应的检查对象物的拍摄条件的登录的显示画面。
图像选择画面800包括拍摄图像显示区域810来显示对应于在步骤S226中接收到的拍摄图像数据的多个拍摄图像820(820a、820b)、对显示在拍摄图像显示区域810中的拍摄图像进行切换的图像切换按钮830、用于输入要登录的拍摄模式的模式名的登录名输入区域840,以及在将所选择的拍摄图像的拍摄条件作为拍摄模式来登录时按下的“登录”按钮850。其中,拍摄图像显示区域810按每个显示的拍摄图像,包含用于选择拍摄图像的选择区域825(825a、825b)。图33的例子表示管理员A选择了拍摄图像820a的状态。
接着,在图34中,当管理员A对选择区域825进行了输入时,通信终端70的受理部72受理拍摄图像的选择(步骤S227)。图33的例子表示管理员A选择了拍摄图像820a的状态。然后,当管理员A按下了“登录”按钮850时,收发部71对图像管理服务器50发送在步骤S227中选择的拍摄图像820的拍摄条件的登录请求(步骤S228)。该拍摄条件登录请求包含在登录名输入区域840中输入的模式名、以及在步骤S223中发送的对象物ID、在步骤S227中选择的拍摄图像数据。由此,图像管理服务器50的收发部51接收从通信终端70发送的拍摄条件登录请求。
接着,图像管理服务器50的存储/读出部59与在步骤S228中接收到的对象物ID相关联地将存储在拍摄图像管理DB5001中的拍摄图像数据更新为在步骤S228中接收到的拍摄图像数据(步骤S229)。然后,图像管理服务器50的收发部51向机器人10发送拍摄条件登录请求(步骤S230)。该拍摄条件登录请求包含在步骤S227中接收到的模式名及对象物ID、以及识别在步骤S229中被更新的拍摄图像数据的文件名等的图像识别信息。由此,机器人10所具备的控制装置30的收发部31接收从图像管理服务器50发送来的拍摄条件登录请求。
控制装置30的登录部41将在步骤S230中接收到的模式名与在步骤S205中存储的基准图像数据关联起来的模式信息登录到模式管理DB3005(参照图15)中(步骤S231)。然后,登录部41将表示对应于在步骤S230中接收到的图像识别信息的拍摄图像数据的拍摄时的拍摄条件的拍摄条件信息,与在步骤S230中接收到的对象物ID和在步骤S231中登录的模式信息所示的模式ID相关联地登录到拍摄条件管理DB3006(参照图16)中(步骤S231)。
如此,拍摄系统1通过机器人10将检查对象物的拍摄图像上传到图像管理服务器50,并在机器人10的检查作业完成后,让管理员从拍摄图像中选择最容易看到的图像,从而能够进行登录与拍摄环境对应的拍摄条件那样的的离线条件下的处理。由此,拍摄系统1只要管理员一次登录检查对象物的拍摄条件,机器人10就能够一边自动地巡回移动路径一边对检查对象物进行拍摄,因此能够减少管理员的登录作业所需的劳力和时间。
另外,拍摄系统1也可以是在图26至图30所示的在线的处理中,拍摄并显示如图33所示的检查对象物的拍摄图像而不是检查区域的俯视图像的构成。另外,拍摄系统1也可以是在图31至图34所示的离线的处理中,拍摄并显示图28所示那样的检查区域的俯瞰图像的构成。这时,拍摄系统1将在俯瞰图像中指定的规定区域的拍摄条件作为包含在规定区域里的检查对象物的拍摄条件来登录。
另外,拍摄系统1通过反复进行上述的处理,能够选择适合外部光条件等的拍摄环境不同的拍摄条件,能够实现拍摄条件的最佳化。具体而言,机器人10例如将在步骤S127中设定的拍摄条件以及在步骤S136中接收到的模式名以及对象物ID作为输入,来更新由拍摄条件管理DB3006管理的拍摄条件信息。或者是,机器人10例如将在步骤S208中设定的拍摄条件以及在步骤S230中接收到的模式名、对象物ID以及图像识别信息作为输入,来更新由拍摄条件管理DB3006管理的拍摄条件信息。然后,机器人10根据更新后的拍摄条件,将在步骤S57中读出的拍摄条件信息作为输出,来进行检查对象物的拍摄处理。由此,拍摄系统1通过机器学习来随时更新由拍摄条件管理DB3006管理的数据,就能够提高检查对象物的拍摄精度。
这里,管理员也可以一边看着显示在通信终端70上的拍摄图像,一边根据外部光条件以外的要素来登录拍摄条件。图35所示是在检查区域中使用机器人10的拍摄处理的另一例的概要说明图。如图35所示,从拍摄点A2、A3可以看到检查对象物M3,但从拍摄点A4看不到。图36的(A)所示是从拍摄点A3拍摄的拍摄图像的一例,图36的(B)是从拍摄点A4拍摄的拍摄图像的一例。如此,检查对象物不仅是外部光条件,还因为拍摄位置而成为对象站点内的其他构造物的影子,或者被其他构造物遮挡。因此,管理员也可以决定作为拍摄条件来登录的拍摄图像,从而不仅是外部光条件,还能够对应于成为对象站点内的其他构造物的影子的遮挡。
·实施方式的效果
如以上说明的那样,拍摄系统1按对象站点的每个检查区域设置测试对象6,并在开始检查区域中的检查作业之前由机器人10拍摄测试对象6。另外,拍摄系统1根据拍摄了测试对象6的拍摄图像的分析结果,设定拍摄条件来显示在检查区域中设定的检查对象物的拍摄位置以及拍摄方向。然后,拍摄系统1使机器人10移动到所设定的拍摄位置,并按照所设定的拍摄方向进行检查对象物的拍摄。由此,拍摄系统1通过使用与因检查的时间或天气而变化的外部光条件等的拍摄环境对应的拍摄条件来拍摄检查对象物,即使是难以读取预先示教的拍摄条件下的图像的情况,也能够获取可以读取检查对象物的状态的拍摄图像。
另外,在本实施方式中,说明了使用机器人10所具备的控制装置30来控制机器人10进行拍摄处理的例子,但也可以是通过图像管理服务器50来执行上述的图像对照处理、模式特定处理以及拍摄条件的设定处理的构成。在这种情况下,图像管理服务器50具有与控制装置30的图像对照部37、模式特定部38、拍摄条件设定部39以及登录部41为相同的构成。另外,在图像管理服务器50的存储部5000中存储有模式管理DB3005和拍摄条件管理DB3006。在这种情况下,图像管理服务器50是信息处理设备的一例。
·总结·
如以上说明的那样,本发明的一个实施方式涉及一种对在规定的站点内移动并拍摄对象物(例如,检查对象物)的机器人(10)(移动体的一例)的拍摄处理进行控制的信息处理装置(例如,控制装置30),包括将对象物的拍摄条件与在特定的拍摄位置拍摄的设置在站点内的对象物且该对象物的映入状态为不同的多个基准图像的每一个相关联地存储的存储部(3000)(存储单元的一例)、使用移动到特定的拍摄位置的机器人10来拍摄对象物的拍摄控制部(36)(拍摄控制单元的一例),以及根据对象物的拍摄图像和所存储的基准图像来设定对象物的拍摄条件的拍摄条件设定部(39)(拍摄条件设定单元的一例),所述拍摄控制部(36)使用所设定的拍摄条件拍摄对象物。由此,信息处理装置能够与拍摄环境无关地获取可以确认对象物的状态的拍摄图像。
此外,在本发明的一个实施方式所涉及的信息处理装置中,对象物包括测试对象6(第1对象物的一例)和检查对象物(第2对象物的一例)。信息处理装置将检查对象物的拍摄条件与在特定的拍摄位置拍摄的设置在站点内的测试对象6且该测试对象6的映入状态为不同的多个基准图像的每一个相关联地进行存储,并使用移动到特定的拍摄位置的机器人(10)(移动体的一例)拍摄测试对象(6)。然后,信息处理装置基于测试对象6的拍摄图像和所存储的基准图像来设定检查对象物的拍摄条件,并使用所设定的拍摄条件来拍摄检查对象物。由此,信息处理装置通过使用与因检查的时间或天气而变化的外部光条件等的拍摄环境对应的拍摄条件来拍摄检查对象物,即使是难以读取预先示教的拍摄条件下的图像的情况,也能够获取可以确认检查对象物的状态的拍摄图像。
进一步地,本发明的一个实施方式所涉及的拍摄系统是具备显示由机器人10(移动体的一例)拍摄的拍摄图像的通信终端70的拍摄系统1。通信终端70具有显示控制部73(显示控制单元的一例)来使通过拍摄控制部36(拍摄控制单元的一例)拍摄的包含多个检查对象物(第2对象物的一例)的检查区域(规定区域的一例)的拍摄图像610(俯瞰图像的一例)显示到显示器706(显示部的一例)上,以及受理部72(受理单元的一例)来受理所显示的拍摄图像610的规定区域的指定。然后,在拍摄系统1中,拍摄控制部36拍摄包含在所指定的规定区域中的特定的检查对象物,存储部3000(存储单元的一例)将拍摄特定的检查对象物时的拍摄条件与通过拍摄控制部36拍摄的测试对象6(第1对象物的一例)的拍摄图像相关联地进行存储。由此,拍摄系统1能够将拍摄有测试对象6的拍摄图像和与检查对象物的拍摄时的拍摄环境对应的拍摄条件相关联地进行登录。另外,拍摄系统1通过反复进行在不同的拍摄环境下的日期和时间的拍摄条件的登录处理,能够登录容易看到与各种拍摄环境分别对应的检查对象物的拍摄条件。
另外,本发明的一个实施方式所涉及的拍摄系统是具备显示由机器人10(移动体的一例)拍摄的拍摄图像的通信终端70的拍摄系统1。通信终端70具有显示控制部73(显示控制单元的一例)来使通过拍摄控制部36(拍摄控制单元的一例)拍摄的检查对象物(第2对象物的一例)的多个拍摄图像820显示到显示器706(显示部的一例)上,以及受理所显示的多个拍摄图像820之中的特定的拍摄图像(例如拍摄图像820a)的选择的受理部72(受理单元的一例)。然后,在拍摄系统1中,存储部3000(存储单元的一例)将特定的拍摄图像的拍摄条件与由拍摄控制部36(拍摄控制单元的一例)拍摄的测试对象6(第1对象物的一例)的拍摄图像相关联地存储。由此,拍摄系统1只要管理员一次登录检查对象物的拍摄条件,机器人10就能够一边自动地巡回移动路径一边对检查对象物进行拍摄,因此能够减少管理员的登录作业所需的劳力和时间。
·补充说明·
上述说明的实施方式的各功能可以通过一个或多个处理电路来实现。这里,本实施方式中的“处理电路”包括由电子电路装配的处理器那样的为了通过软件来执行各功能而被编程的处理器、被设计为执行上述各功能的ASIC(Application Specific IntegratedCircuit:应用专用集成电路)、DSP(Digital Signal Processor:数字信号处理器)、FPGA(field programmable gate array:现场可编程门阵列)、SOC(System on a chip:片上系统)、GPU(Graphics Processing Unit:图形处理单元)以及以往的电路模块等设备。
另外,上述说明的实施方式的各种表既可以是通过机器学习的学习效果来生成的表,也可以是通过机器学习对相关联的各项目的数据进行分类而不使用表。这里,机器学习是一种用于使计算机获得人那样的学习能力的技术,计算机从预先取入的学习数据来自主地生成数据识别等的判断所需要的算法,并将其应用于新数据来进行预测的技术。用于机器学习的学习方法可以是有监督学习、无监督学习、半监督学习、强化学习以及深层学习中的任一种方法,进一步地,也可以是组合了这些学习方法的学习方法,用于机器学习的学习方法没有限制。
到此为止对本发明的一个实施方式所涉及的信息处理装置、移动体、拍摄系统、拍摄控制方法以及程序进行了说明,本发明不局限于上述的实施方式,对于其他的实施方式的追加、变更或删除等,在本领域技术人员所能想到的范围内可以进行变更,无论是怎样的方式,只要起到本发明的作用和效果,都在本发明的范围内。
附图标记列表
1拍摄系统
6测试对象(第1对象部的一例)
100通信网络
10机器人(移动体的一例)
30控制装置(信息处理装置的一例)
31收发部
36拍摄控制部(拍摄控制单元的一例)
37图像对照部(图像对照单元的一例)
38模式特定部(模式特定单元的一例)
39拍摄条件设定部(拍摄条件设定单元的一例)
50图像管理服务器(信息处理装置的一例)
70通信终端
72受理部(受理单元的一例)
73显示控制部(显示控制单元的一例)
706显示器(显示部的一例)
3000存储部(存储单元的一例)
- 图像拍摄控制方法、装置、服务器、存储介质及拍摄装置
- 拍摄控制装置以及拍摄控制方法
- 全景页面切换时拍摄点的移动控制方法和装置
- 移动体检测装置及检测方法、移动体学习装置及学习方法、移动体检测系统以及程序
- 信息处理装置、程序、以及信息处理装置的控制方法
- 光谱照相机控制装置、光谱照相机控制程序、光谱照相机控制系统、搭载有该系统的飞行体及光谱图像拍摄方法
- 信息处理设备、成像设备、装置控制系统、移动体、信息处理方法以及计算机程序产品