一种激光雷达动态目标感知系统
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及动态数据测量技术领域,具体是指一种激光雷达动态目标感知系统。
背景技术
复杂环境中的动态目标感知系统是自动驾驶技术的重要组成部分。感知系统需要对三维动态目标进行检测、跟踪并根据历史轨迹预测目标的运动趋势,为决策、规划系统提供足够的环境信息。目前,三维目标检测用到的传感器主要有相机和激光雷达。单一相机识别时相机易受环境光照条件影响,且难以获取较为精确的运动信息;而单一激光雷达识别时激光点云具有稀疏性,当目标距离较远时,识别效果将显著下降。
发明内容
本发明要解决的技术问题是,克服以上技术缺陷,提供一种具有双目相机配合激光雷达拟合检测动态信息的一种激光雷达动态目标感知系统。
为解决上述技术问题,本发明提供的技术方案为:一种激光雷达动态目标感知系统,包括输入端、数据检测端与用户端,所述输入端包括双目相机与激光雷达,所述激光雷达用于感知目标信息,所述双目相机用于捕获目标信息,所述数据检测端包括与双目相机连接的数据检测端二,还包括与数据检测端一、数据检测端二连接的目标融合模组,所述用户端接收目标融合模组输出信息。
作为改进,还包括天气检测模组,所述天气检测模组用于对雨量检测。
作为改进,还包括天气检测模组,所述天气检测模组用于对雨量检测。
作为改进,所述数据检测端一包括点云生成模组和与点云生成模组连接的二维栅格模组。
作为改进,所述数据检测端二包括目标检测模组和与目标检测模组连接的目标点拟合模组。
作为改进,所述目标融合模组基于目标结果,进行目标级融合,输出目标信息以进行路径导航。
本发明与现有技术相比的优点在于:本发明融合双目相机和激光雷达,进行二维目标检测,同时还设有天气检测模组,可以根据雨量来调整激光雷达的配置参数,实现各雷达感知参数的动态调整,同时通过栅格化地图,将栅格外点云进行首次过滤,然后仅对地图栅格内的部分点进行边界属性计算,可以降低计算成本、时间成本,同时保证原有的检测距离、精度。
附图说明
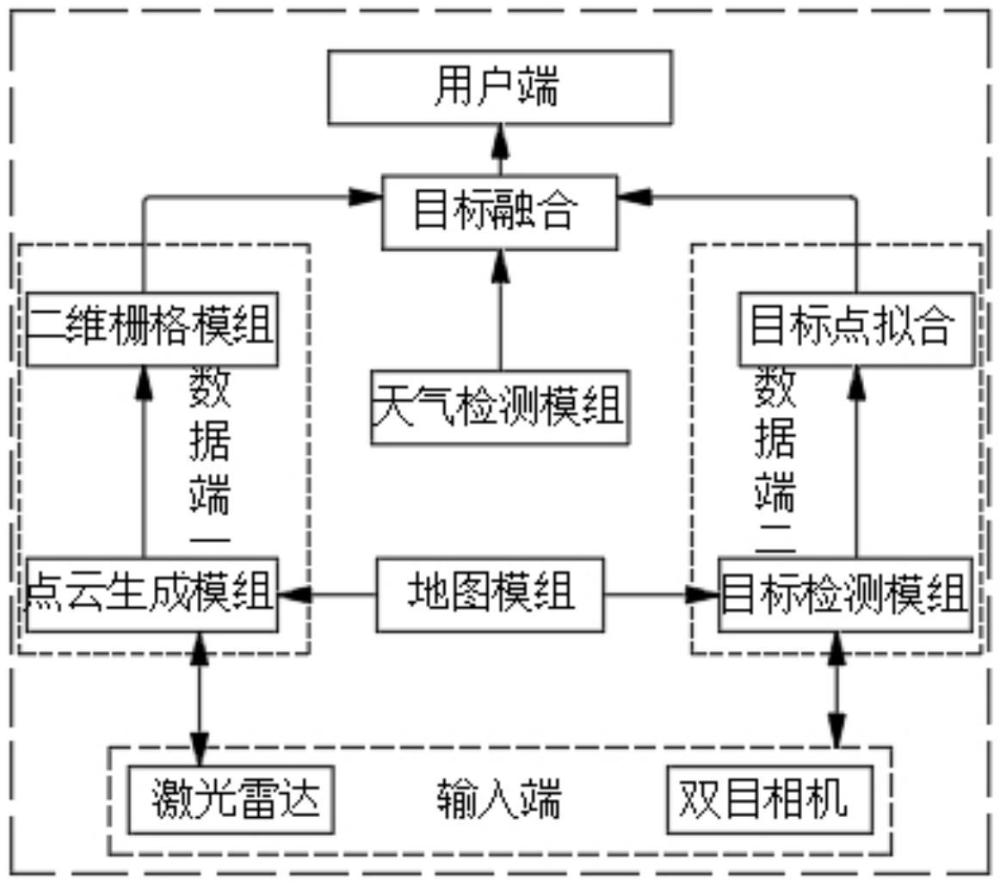
图1是本发明的系统结构示意图。
具体实施方式
下面结合附图对本发明做进一步的详细说明。
结合附图1所示,一种激光雷达动态目标感知系统,包括输入端、地图模组、数据检测端与用户端,所述输入端包括双目相机与激光雷达,所述激光雷达用于感知目标信息,所述双目相机用于捕获目标信息,所述数据检测端包括与双目相机连接的数据检测端二,还包括与数据检测端一、数据检测端二连接的目标融合模组,所述用户端接收目标融合模组输出信息,同时还包括天气检测模组,所述天气检测模组用于对雨量检测,地图模块分别对数据检测端一、数据检测端二输出信息。
所述数据检测端一包括点云生成模组和与点云生成模组连接的二维栅格模组,所述数据检测端二包括目标检测模组和与目标检测模组连接的目标点拟合模组,所述目标融合模组基于目标结果,进行目标级融合,输出目标信息以进行路径导航。
本发明在具体实施时,双目相机为两颗安装在车辆两侧,激光雷达安装在车体顶部,使用双目视觉采集数据,同时激光雷达采集数据,配合地图模组对录入信息配合地图模组建格,将初始位姿映射到二维地图,同时拟合检测,进行目标融合,通过使用像素点的色彩不同来表示可通行区域,障碍物和位置区域输出至用户端,在使用时通过天气检测模块检测天气情况,根据不同天气配置不同的雷达数据使用。本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
本发明的工作原理:。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种融合相机与激光雷达的动态目标感知系统及方法
- 一种基于激光雷达的三维目标感知方法、装置及系统