一种抗长时遮挡的低慢小目标跟踪装置及方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明属于光电跟踪技术领域,涉及一种光电搜索、识别、跟踪无人机方法。
背景技术
低慢小目标是低空、慢速、小型目标的统称,一般将飞行高度小于1000m,飞行时速小于200公里,雷达反射面积小于两平方米的低空飞行物称为低慢小目标。低慢小目标主要包括部分民用无人机、航空模型等低慢小航空器,以及飞鸟、风筝等低空飞行物,具有起飞要求低、升空突然性强、发现处置困难等特点。
目前低慢小目标的探测方式主要有雷达和光电两种方式,雷达具有探测距离远、不受天气影响等优点,但是其测角精度较低,也不能适应城市等复杂背景的情况。光电探测测角、测距精度高,可对目标进行清晰成像,并对目标类型进行进一步的识别,同时,通过多光谱融合及先进算法可实现在城市复杂背景下对无人机目标的跟踪。
由于城市环境楼宇众多,威胁无人机可能在众多楼宇中穿梭,使得光电跟踪装置的跟踪过程经常被楼宇遮挡,无法实现对遮挡无人机的全程跟踪、威胁等级评估和有效拦截。因此需要更为先进的探测和跟踪手段来对低慢小目标实时全程监控。
发明内容
为解决现有光电跟踪装置无法实现对遮挡无人机的全程跟踪监控的技术问题,本发明提供了一种抗长时遮挡的低慢小目标跟踪装置及方法。
本发明的技术方案是:
一种抗长时遮挡的低慢小目标跟踪装置,包括光电搜索跟踪装置;
所述光电搜索跟踪装置包括转台、控制器和上位机;
所述转台包括转台本体和设置在转台本体上的多波段分光成像模块、红外成像模块、激光测距模块和图像融合板;
所述控制器包括时序控制板、图像解析板、伺服驱动器、转台伺服控制板、和GPU图像处理平台;
其特殊之处在于:
所述光电搜索跟踪装置还包括第一差分GPS和第一无线指令收发装置;所述GPU图像处理平台上运行有用于生成制导指令的制导算法;
所述低慢小目标跟踪装置还包括监控型无人机;
监控型无人机为长航时混合翼无人机,所述长航时混合翼无人机上安装有小型光电吊舱、第二差分GPS和第二无线指令收发装置;
所述第二差分GPS用于定位监控型无人机的当前位置,为所述制导算法提供数据源;第二无线指令收发装置用于接收来自所述光电搜索跟踪装置的制导指令,同时向所述光电搜索跟踪装置下发自身的差分GPS定位数据。
进一步地,所述小型光电吊舱采用两轴四框架结构。
本发明还提供了一种基于上述的抗长时遮挡的低慢小目标跟踪装置实现低慢小目标跟踪的方法,其特殊之处在于,包括以下步骤:
1)系统初始化,包括上位机设置搜索空域范围、向光电搜索跟踪装置的控制器发送目标搜索指令;
2)控制器接收目标搜索指令,并案设定的搜索空域范围,控制转台进行目标搜索;
3)控制器对转台搜索的目标进行识别,若探测到目标,则进入步骤4);若未探测到目标,则返回步骤2);
4)控制器将识别的目标信息发送至上位机,并利用深度学习对搜索到的目标进行分类,标识威胁等级;
5)上位机对目标进行确认后,向控制器发送目标跟踪指令;
6)控制器接收所述目标跟踪指令,控制转台进行目标捕获和跟踪;
7)转台通过其上的激光测距模块测量目标的斜距,并结合方位、俯仰角度解算目标相对于转台的三维坐标,再经坐标转换后获取目标在地面坐标系中的估计三维坐标;
8)监控型无人机将自身差分GPS定位信息传给控制器,控制器根据目标在地面坐标系中的估计三维坐标和监控无人机自身差分GPS定位信息,形成制导指令传给监控型无人机;
9)监控型无人机接收所述制导指令,根据所述制导指令接近目标,若监控型无人机到达目标上空,进入步骤10);若监控型无人机未达到目标上空,则返回步骤8);
10)光电搜索跟踪装置向监控型无人机发送主动跟踪指令,监控型无人机利用其上的小型光电吊舱,捕获目标到吊舱视场中心,锁定目标;
11)监控型无人机主动跟踪目标;
12)判断目标是否重新进入光电搜索跟踪装置视场,若是,则进入步骤13);若否,则返回步骤11);
13)判断目标是否重新进入光电搜索跟踪装置视场,若是,则进入步骤13);若否,则返回步骤11);
13)判断是否停止跟踪目标,若是,则结束流程;若否,则返回步骤6)。
进一步地,所述步骤11)具体为:监控型无人机根据自身差分GPS坐标和精确跟踪情况下机载小型光电吊舱测量得到的自身方位俯仰编码器信息和激光测距信息,得到目标无人机的飞行轨迹,监控型无人机将目标无人机的飞行轨迹信息无线发送给光电搜索跟踪装置进行轨迹合成,监控型无人机按照光电搜索跟踪装置合成后的轨迹跟踪目标无人机。
本发明的有益效果是:
本发明采用光电搜索跟踪装置+监控型无人机的联合探测方式,通过光电搜索跟踪装置发现、识别、跟踪黑飞无人机目标,获取其三维坐标及轨迹,当目标飞入楼宇背景后,由在监控区上空值班的监控型无人机进行接力跟踪,光电搜索跟踪装置和监控型无人机共同合成完整的黑飞无人机飞行轨迹和飞行参数,为黑飞无人机威胁等级评估提供有效评估数据,有效弥补了单一光电探测存在楼宇背景遮挡等监控盲区的问题。
附图说明
图1是本发明抗长时遮挡的低慢小目标跟踪装置的组成框图。
图2是本发明抗长时遮挡的低慢小目标跟踪装置中各组成部分之间的连接关系示意图。
图3是本发明中监控型无人机的示意图。
图4是本发明抗长时遮挡的低慢小目标跟踪装置的工作示意图。
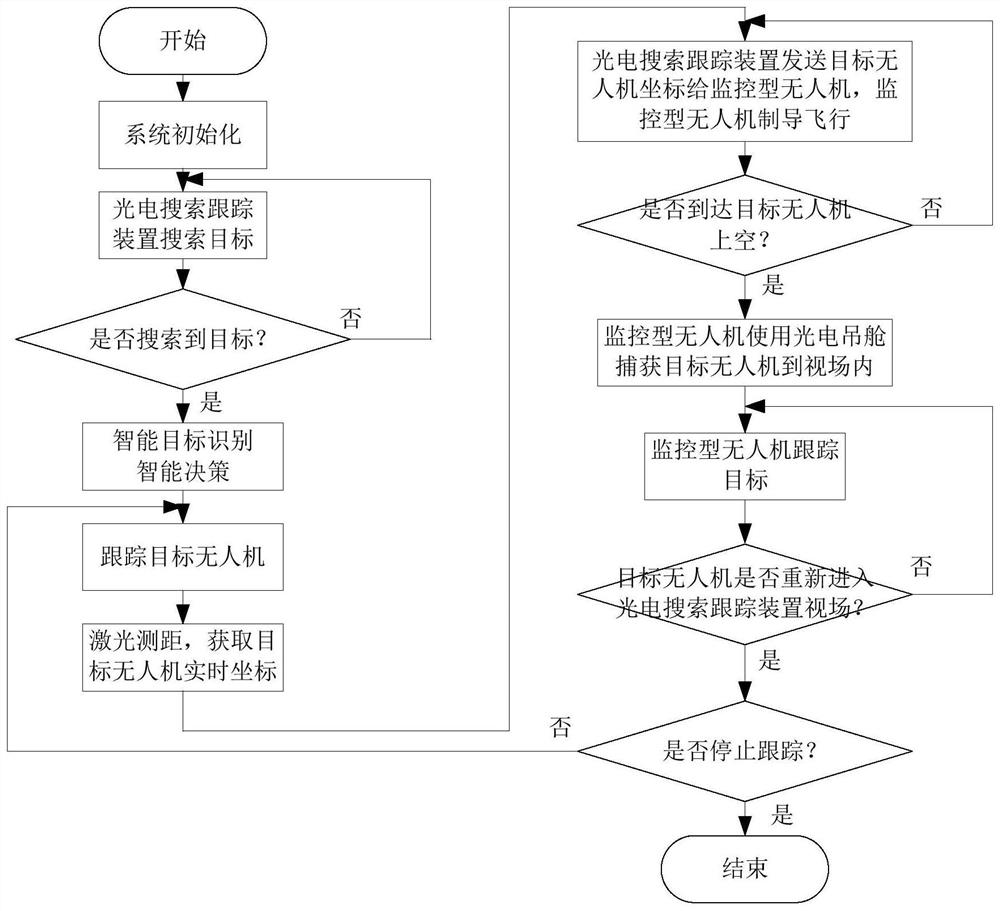
图5是本发明抗长时遮挡的低慢小目标跟踪装置的工作流程图。
图6是本发明中光电吊舱的结构示意图。
图7是本发明中光电搜索跟踪装置和监控型无人机联合测量示意图。
图8是本发明中光电搜索跟踪装置和监控型无人机联合测量仿真轨迹。
具体实施方式
以下结合附图对本发明作进一步说明。
如图1、2所示,本发明所提供的抗长时遮挡的低慢小目标跟踪装置,包括光电搜索跟踪装置和监控型无人机。
光电搜索跟踪装置包括转台、控制器、上位机以及附件(键鼠显示、隔离电源)。
转台主要用于进行目标搜索成像、跟踪成像、激光测距以及搜索和跟踪动作的执行。转台包括负载总成和转台本体;负载总成是光电搜索跟踪装置进行光电测量的执行部,主要包括多波段分光成像模块(由三个探测器和一个多波段分光成像变焦镜头构成)、红外成像模块(由一个红外相机和一个镜头构成)、激光测距模块和图像融合板;多波段分光成像模块和红外成像模块共同用于对复杂背景下目标无人机进行多光谱探测,其中多波段分光成像模块用于获取目标的多光谱图像,红外成像模块用于获取目标的红外图像;激光测距模块用于测量出目标无人机的斜距;图像融合板用于将多波段分光成像模块、红外成像模块采集的图像进行图像压缩,然后转换为光纤信号后传输给控制器中的图像解析板。为了实现车载情况下的平台稳定,在转台本体上还安装了方位陀螺和俯仰陀螺。为了预防负载总成自然散热效果不佳,在负载总成结构上预留了散热风扇接口和散热风扇安装位置。转台本体采用现有单元,作为负载总成的承载机构,能够在控制器指令下执行方位、俯仰旋转动作,从而使负载总成能够进行扫描搜索、跟踪。转台本体主要包括框架主体,以及设置在框架主体上的方位电机及编码器、俯仰电机及编码器、方位陀螺、俯仰陀螺、方位光电滑环、俯仰光电滑环、差分GPS模块和光纤陀螺寻北仪,其中,差分GPS模块用于实现对光电搜索跟踪装置的定位,获得其准确坐标;光纤陀螺寻北仪用于测量方位编码器零位与北向基准的夹角;方位陀螺信号和俯仰陀螺信号分别通过方为光电滑环和俯仰光电滑环传递给控制器中的陀螺补偿控制板。
控制器主要进行图像处理和目标识别、光电搜索跟踪装置的搜索和跟踪模式的控制、多波段分光成像模块、红外成像模块、激光测距模块的控制、以及与上位机之间的信息交互。控制器包括GPU图像处理平台、无线指令收发装置、时序控制板、转台伺服控制板、陀螺补偿控制板、伺服驱动器、图像解析板和电源模块;其中,无线指令收发装置用于向监控型无人机发送制导指令,以及接收由监控型无人机回传的差分GPS坐标信息;时序控制板用于为GPU图像处理平台和转台伺服控制板提供控制时序;转台伺服控制板用于对转台本体进行伺服控制;陀螺补偿控制板用于处理方位陀螺和俯仰陀螺的陀螺信号,进行稳像补偿解算,并将解算结果传给转台伺服控制板进行伺服反馈控制;伺服驱动器为方位电机和俯仰电机的功率驱动机构;图像解析板用于解压由图像融合板传来的压缩图像并发送给GPU图像处理平台;电源模块用于将外部隔离电源进行电压转化,为控制器内各模块供电;GPU图像处理平台用于对解压的图像进行图像处理,用于控制激光测距模块并接受激光测距结果,以及用于生成制导指令。
上位机和键鼠显示单元用于进行搜索图像和跟踪图像的显示、目标的人工确认、搜索和跟踪的相关参数设置和模式控制。如图3所示,监控型无人机为长航时混合翼无人机,其上安装有机载小型光电吊舱、第二差分GPS和第二无线指令收发装置;
混合翼是指可垂直起降的四旋翼和固定机翼的组合,固定机翼上布置有太阳能电池板,监控型无人机起飞后依靠太阳能电池板可维持长时间的续航飞行,在巡逻状态下,垂直起降用的四个旋翼不工作,监控型无人机以较快速度沿监控区域周边巡飞;在跟踪黑飞无人机的情况下,监控型无人机主要由垂直起降用的四个旋翼驱动,飞行稳定,以便于机载小型光电吊舱实现对黑飞无人机的跟踪。
长航时混合翼无人机上安装的小型光电吊舱,用于对监控区域黑飞无人机的跟踪;小型光电吊舱为现有单元,其组成如图6所示。
长航时混合翼无人机上安装的第二差分GPS用于定位监控型无人机的当前位置,为制导算法提供数据源。
长航时混合翼无人机上安装的第二无线指令收发装置用于接收来自光电搜索跟踪装置的制导指令,同时向光电搜索跟踪装置下发自身的差分GPS定位数据。
图4为本发明抗长时遮挡的低慢小目标跟踪装置的工作示意图,增加地面差分GPS基站可以提高光电搜索跟踪装置和监控型无人机的定位精度。
如图5所示,本发明工作流程:
1)系统初始化:包括系统架设、连线、调平;系统上电、各模块自检;上位机设置搜索空域等参数,发送目标搜索指令,监控型无人机起飞,沿监控区域周边进行巡逻;
2)控制器接收上位机发出的搜索指令,按设定的搜索空域范围,控制转台进行目标搜索;
3)控制器进行搜索目标识别,若探测到疑似目标,进入步骤d);若未探测到目标,返回步骤2);
4)控制器将识别的目标信息发送至上位机,并利用深度学习对目标进行分类,标识威胁等级;
5)上位机对目标进行确认后,发送目标跟踪指令;
6)控制器接收上位机发出的目标跟踪指令,控制转台进行目标捕获和跟踪,在跟踪过程中利用激光测距模块进行激光测距、自适应变焦或通过上位机手动变焦;
7)光电搜索跟踪装置通过激光测距测量出目标无人机的斜距,GPU图像处理平台通过结合方位、俯仰角度解算出目标无人机相对于光电搜索跟踪装置的三维坐标,由于光电搜索跟踪装置自身坐标可通过差分GPS获取,经坐标转换后可获得目标无人机在地面坐标系中的估计三维坐标;
8)监控型无人机和光电搜索跟踪装置之间存在无线通信链路,可将自身差分GPS定位信息传递给光电搜索跟踪装置,光电搜索跟踪装置中的GPU图像处理平台根据目标无人机坐标和监控型无人机GPS在地面坐标系中的估计三维坐标形成制导指令,传给监控型无人机以引导监控型无人机接近目标无人机上空;
9)监控型无人机接收所述制导指令,根据所述制导指令接近目标,若监控型无人机到达目标无人机上空,进入步骤10);若监控无人机还没有到达目标无人机上空,则返回步骤8);
10)光电搜索跟踪装置中的GPU图像处理平台向监控型无人机发送主动跟踪指令,监控型无人机控制小型光电吊舱转动,捕获目标无人机到吊舱视场中心,锁定目标;
11)监控型无人机主动跟踪目标;
监控型无人机根据自身差分GPS坐标和精确跟踪情况下机载小型光电吊舱测量得到的自身方位俯仰编码器信息和激光测距信息,得到目标无人机的飞行轨迹,监控型无人机将目标无人机的飞行轨迹信息无线发送给光电搜索跟踪装置进行轨迹合成,监控型无人机按照光电搜索跟踪装置合成后的轨迹跟踪目标无人机;12)光电搜索跟踪装置中的控制器判断目标是否重新进入光电搜索跟踪装置视场,若是,则进入步骤13);若否,则返回步骤11);
13)光电搜索跟踪装置中的控制器判断是否停止跟踪目标,若是,则结束流程;若否,则返回步骤6);
本发明制导原理:
1)地面坐标系
以光电跟踪装置所在点为地面坐标系坐标原点O,Y轴指北,X轴指东,Z轴根据右手定则确定。目标无人机的位姿态、速度、角速度等都是相对于这一坐标系来衡量的,监控型无人机上安装的差分GPS,获得的原始坐标是相对于WGS84(世界大地坐标系),光电跟踪装置上的差分GPS,获得光电跟踪装置相对于WGS84的坐标,最后通过坐标转换,将所有坐标转换到地面坐标系中。
2)机体坐标系
机体坐标系固连在监控型无人机上,坐标原点O位于监控型无人机的质心处,X轴在监控型无人机的对称面内,并且平行于监控型无人机的设计轴线,指向机头前方。Y轴垂直于监控型无人机的机身对称面,指向机身右方。Z轴在监控型无人机对称面内,与XOY平面垂直,并指向监控型无人机的下方。
光电搜索跟踪装置为测量基站,测量基站的位置坐标由差分GPS获取,设当前测量基站i的差分位置坐标为(x
监控型无人机起飞后,其实时坐标由机体自带的差分GPS获取,监控型无人机将自身坐标发送给光电搜索跟踪装置,光电搜索跟踪装置根据监控型无人机自身坐标和目标无人机在WGS84坐标系下的坐标生成制导指令,引导监控型无人机按照制导轨迹接近目标无人机。当监控型无人机和目标无人机距离小到某一阈值,开启光电吊舱搜索目标无人机,捕获目标无人机到吊舱视场中心,锁定目标。
如图6所示,监控型无人机上的小型光电吊舱采用现有的两轴四框架结构,两轴四框架的稳定方式在高精度光电稳定系统中得到广泛的应用。这种系统采用粗精组合的稳定方式,与传统的两轴两框架系统相比,结构上有明显优越性。主要表现在:1)运动隔离性好,稳定精度高;2)可以避免高仰角时稳定系统的环架闭锁现象;3)可以减小电机的功率和体积。
外框架为粗稳定系统,内框架为精稳定系统,内环架装有被稳定负载及陀螺仪,陀螺仪分别敏感俯仰、方位轴向的干扰运动,并将偏差信号经稳定回路分别送到内环方位、俯仰电机,以抵消干扰。当基座出现扰动时,由于摩擦约束耦合和几何约束耦合,使光轴偏离原来的惯性空间。安装在内环架上的陀螺受到该干扰速率后,驱动内方位环电机和内俯仰环电机,产生与干扰速率大小相等、方向相反的补偿速率,从而抵消干扰速率,使光轴保持稳定。同时外环架跟随内环架的误差信号,保持内外俯仰、方位环架平行,同时也保证了内俯仰和内方位轴始终保持垂直,减小几何耦合。粗精两个稳定系统是相对独立的,内环是一个独立的陀螺稳定系统,而外环是一个随动于内环的随动系统。
监控型无人机的位置坐标由差分GPS获取,设当前监控型无人机的差分位置坐标为(x
最终目标无人机的测量轨迹是由光电搜索跟踪装置测量得到的目标无人机轨迹(x
图7、图8为光电搜索跟踪装置和监控型无人机联合探测目标无人机运动轨迹的仿真图。在楼宇背景未遮挡目标无人机的情况下,以光电搜索跟踪装置的探测轨迹为主,在楼宇背景遮挡目标无人机的情况下,由监控型无人机探测目标无人机运动轨迹,最后,光电搜索跟踪装置的探测轨迹和监控型无人机的探测轨迹合成一条目标无人机运动轨迹。
- 一种抗长时遮挡的低慢小目标跟踪装置及方法
- 基于多特征融合和区域生长的低小慢目标跟踪方法及装置