一种喷涂机器人
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及喷涂机器人技术领域,特别涉及一种喷涂机器人。
背景技术
现有技术中,钢箱梁内表面涂装操作繁琐,通常需要人工参与,劳动强度大,喷涂质量不稳定,且存在安全隐患。虽然现有技术中有喷涂机械臂等自动喷涂装备,但都是定点喷涂或者结构外表面喷涂,无法适应钢箱梁的内部空间;导致喷涂质量和效率均较差。
发明内容
本发明提供一种喷涂机器人,解决现有技术中钢箱梁内表面喷涂质量不理想,效率低,劳动强度大的技术问题。
为解决上述技术问题,本发明提供了一种喷涂机器人,包括:履带式移动小车、喷涂机械臂、三维扫描装置、监视摄像装置、喷涂浓度监测装置、车载控制器以及服务器;
所述喷涂机械臂、所述三维扫描装置、所述监视摄像装置、所述喷涂浓度监测装置以及所述车载控制器固定在所述履带式移动小车上;
所述喷涂机械臂、所述三维扫描装置、所述监视摄像装置以及喷涂浓度监测装置分别与所述车载控制器相连,所述车载控制器与所述服务器相连。
进一步地,所述履带式移动小车包括:车体、驱动机构、车轮组以及履带;
所述驱动机构固定在所述车体上,所述车轮组通过传动结构与所述驱动机构相连,所述履带套接在所述车轮组上。
进一步地,所述车轮组包括两个分组,且每个分组中的车轮数量为两个以上。
进一步地,所述车轮包括:车轮毂以及车轮胎;
所述车轮毂通过传动机构与所述驱动机构相连,所述车轮胎固定在所述车轮毂上;
所述履带固定在所述车轮胎上。
进一步地,所述喷涂机器人还包括:限位支撑架;
所述限位支撑架对应固定在所述喷涂机械臂下方。
进一步地,所述限位支撑架上开设有接触支撑部,所述接触支撑部上布设有柔性橡胶垫。
进一步地,所述喷涂机器人还包括:防爆伺服电机、卷扬轴以及卷扬盘;
所述卷扬盘通过所述卷扬轴固定在所述履带式移动小车上,所述防爆伺服电机固定在所述履带式移动小车上并与所述卷扬轴相连;
所述卷扬盘上设置有输料管接头。
进一步地,所述喷涂机器人还包括:无线遥控通信模块以及无线遥控终端;
所述无线遥控通信模块固定在所述履带式移动小车并与所述车载控制器相连,所述无线遥控通信模块与所述无线遥控终端相连。
进一步地,所述喷涂浓度监测装置包括:现场湿膜检测器。
进一步地,所述喷涂浓度监测装置包括:溶剂浓度检测器。
本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
本申请实施例中提供的喷涂机器人,通过履带式移动小车作为钢箱梁内部的自动喷涂的载具,依赖其稳定可靠的移动能力,实现精确地移动路线控制,从而极大地提升自动喷涂质量,同时效率也更高。通过喷涂机械臂能够按照设定的喷涂方案实现高质量,高效的自动喷涂,提升效率,降低劳动强度。通过三维扫描装置、监视摄像装置、车载控制器以及服务器实现现场环境的扫描,从而便于建立三维模型,设计自动喷涂路线,参数,喷涂流量等参数;同时,设置喷涂浓度监测装置实时监测环境内的现场溶剂浓度,避免喷涂场浓度过高时机体燃爆风险过高,提升操作安全性。
附图说明
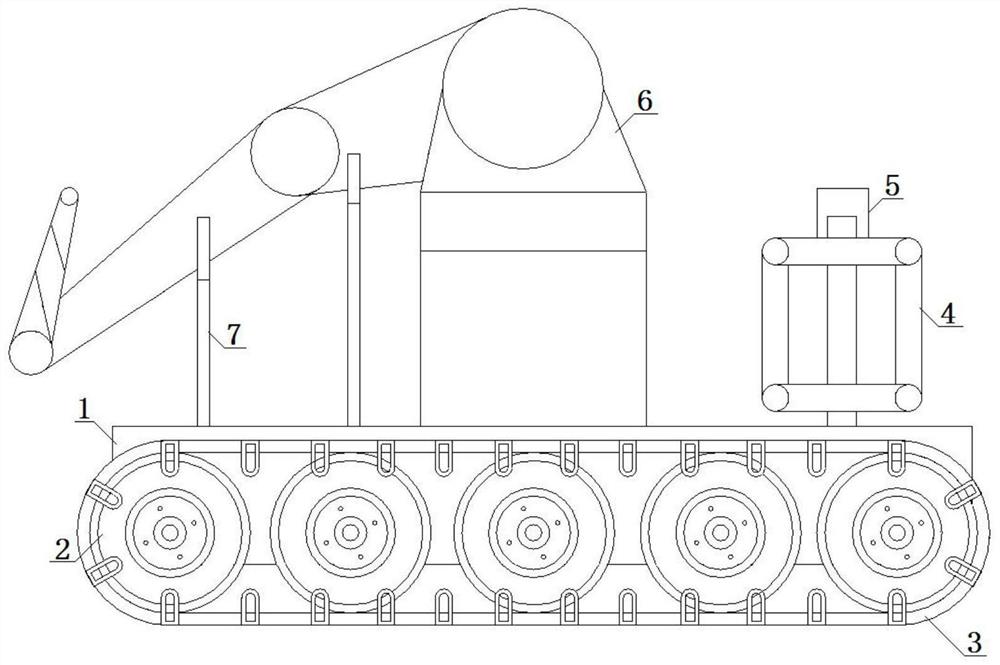
图1为本发明实施例提供的喷涂机器人的结构主视图;
图2为本发明实施例提供的喷涂机器人的结构左视图;
图3为本发明实施例提供的车轮的结构示意图;
图4为本发明实施例提供的所述限位支撑架的结构示意图。
具体实施方式
本申请实施例通过提供一种喷涂机器人,解决现有技术中钢箱梁内表面喷涂质量不理想,效率低,劳动强度大的技术问题。
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细说明,应当理解本发明实施例以及实施例中的具体特征是对本申请技术方案的详细的说明,而不是对本申请技术方案的限定,在不冲突的情况下,本申请实施例以及实施例中的技术特征可以相互组合。
参见图1和图2,一种喷涂机器人,包括:履带式移动小车1、喷涂机械臂6、三维扫描装置、监视摄像装置、喷涂浓度监测装置、车载控制器以及服务器;所述喷涂机械臂6、所述三维扫描装置、所述监视摄像装置、所述喷涂浓度监测装置以及所述车载控制器固定在所述履带式移动小车1上;所述喷涂机械臂6、所述三维扫描装置、所述监视摄像装置以及喷涂浓度监测装置分别与所述车载控制器相连,所述车载控制器与所述服务器相连。
即,通过具备良好跨障碍移动能力的履带式移动小车1作为移动载具,从而能够极大提升移动喷涂的效率和质量;同时通过所述三维扫描装置、所述监视摄像装置配合所述车载控制器与所述服务器实现钢箱梁内壁面的三维数据获取,从而能够建立现场的三维模型,便于设计可靠的自动喷涂路线,喷涂机械臂6的喷涂参数等控制方案,实现高效,高质量,自动化喷涂;降低人工参数程度,也降低劳动强度。
喷涂机器人沿底板U肋横向行走,同时对箱内隔舱进行视觉三维扫描,按喷涂顺序从中间向人孔侧施工、先横隔板下侧预喷涂、再按顶板、隔板和底板的施工顺序在电脑中进行虚拟仿真模拟施工。喷涂机器人按虚拟仿真车架移动程序、喷涂机械臂角度及长度控制路线,喷涂机器人结合车架、机械臂运动轨迹和喷涂轨迹要求按虚拟仿真喷涂臂运行轨迹进行验证校准测试30s,然后对程序进行优化。
本实施例中,所述履带式移动小车1包括:车体、驱动机构、车轮组2以及履带3;所述驱动机构固定在所述车体上,所述车轮组2通过传动结构与所述驱动机构相连,所述履带3套接在所述车轮组上。
一般来说,所述车轮组2包括两个分组,且每个分组中的车轮数量为两个以上。
参见图3,值得说明的是,所述车轮包括:车轮毂8以及车轮胎;所述车轮毂8通过传动机构与所述驱动机构相连,所述车轮胎固定在所述车轮毂8上;所述履带3固定在所述车轮胎上。
即,采用具备车轮胎的车轮驱动所述履带3,从而间距履带3的通过性能;同时还具备车轮胎的灵活性,整体上提升跨障碍能力。
相配合的,本实施例中,所述车轮组2的车轮位于同一水平面上。
参见图1和图4,所述喷涂机器人还包括:限位支撑架7;所述限位支撑架7对应固定在所述喷涂机械臂6下方,实现稳定收纳支撑。
进一步地,所述限位支撑架7上开设有接触支撑部,所述接触支撑部上布设有柔性橡胶垫71。
当移动到位后,所述喷涂机械臂2展开,移开隔舱内工装平台,所述限位支撑架7收回,喷涂机器人展开臂达到顶板喷涂预定高度。驱动机构采用的直流伺服电动机,驱动车轮及橡胶履带移动至基准位置。
为了保证良好的防爆性能,所述喷涂机器人还包括:防爆伺服电机5、卷扬轴以及卷扬盘4;所述卷扬盘4通过所述卷扬轴固定在所述履带式移动小车1上,所述防爆伺服电机5固定在所述履带式移动小车1上并与所述卷扬轴相连;所述卷扬盘4上设置有输料管接头。
到位后,启动涂料供料系统,将供料管接至喷涂机器人卷扬盘接口上,先对双组份各自供料管道进行清洗,然后按优化的程序进行实物喷涂施工,实现边喷涂边收放供料管。
进一步地,所述喷涂机器人还包括:无线遥控通信模块以及无线遥控终端;所述无线遥控通信模块固定在所述履带式移动小车并与所述车载控制器相连,所述无线遥控通信模块与所述无线遥控终端相连。
车载控制器采用双CPU冗余设计技术,遥控系统的无线数据传输对机器人状况进行回传,具自诊断功能对设备运行进行自动诊断、设备状态进行管理。
本实施例中,所述喷涂浓度监测装置包括:现场湿膜检测器或者溶剂浓度检测器。
本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
本申请实施例中提供的喷涂机器人,通过履带式移动小车作为钢箱梁内部的自动喷涂的载具,依赖其稳定可靠的移动能力,实现精确地移动路线控制,从而极大地提升自动喷涂质量,同时效率也更高。通过喷涂机械臂能够按照设定的喷涂方案实现高质量,高效的自动喷涂,提升效率,降低劳动强度。通过三维扫描装置、监视摄像装置、车载控制器以及服务器实现现场环境的扫描,从而便于建立三维模型,设计自动喷涂路线,参数,喷涂流量等参数;同时,设置喷涂浓度监测装置实时监测环境内的现场溶剂浓度,避免喷涂场浓度过高时机体燃爆风险过高,提升操作安全性。
最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种喷涂机器人用喷涂机构及喷涂机器人
- 一种用于线缆喷涂机器人的行走装置及线缆喷涂机器人