真空电路中断器
文献发布时间:2023-06-19 11:27:38
本申请是申请日为2017年1月27日、申请号201780016490.6(国际公开号WO2017/172007)、发明名称为“真空电路中断器”的分案申请。
本申请要求于2016年3月30日提交的美国专利申请序列号15/084,871的优先权和权益,所述专利申请通过引用结合在此。
背景技术
技术领域
所公开的和所要求保护的概念涉及一种真空断路器,并且更具体地涉及一种真空断路器,其中可动第一触点组合件引线柱本体具有减小的长度。
断路器和其它这种装置保护电气系统免受走电条件,如电流过载、短路和低电平电压条件。在一个实施例中,断路器包含弹簧动力式操作机构,所述弹簧动力式操作机构响应于异常情况断开电触点以中断电气系统中通过导体的电流。具体地讲,真空电路中断器包含可分离式主触点,所述可分离式主触点被安置在壳体内的绝缘且气密密封的真空室内。通常,可动触点组合件被焊接到波纹管,所述波纹管是真空室的一部分。因此,替换可动触点组合件,即改变真空断路器的操作特性,需要破坏真空室。
触点是包含引线柱和触点构件的电极的一部分。通常,所述电极中的一个相对于壳体而固定。其它电极可相对于壳体和其它电极移动。在真空电路中断器中,可动电极组合件通常包括封闭在真空室内一端处的圆形截面具有触点构件的铜引线柱和处于真空室外部的另一端处的驱动机构。可动触点的引线柱的长度比部分地安置在真空室壳体中的引线柱的长度长50%,即,大于一半。这种引线柱的质量需要能够提升这种引线柱的稳健的操作机构。也就是说,由于这种引线柱的质量,因此在操作机构必须稳健方面存在增加的成本。进一步地,这种引线柱的费用与它们的材料成本相关。
在一个实施例中,真空中断器用于中断数千安倍或更多的中压交流(AC)电流以及还有高压AC电流。在一个实施例中,为多相电路的每个相位提供一个真空中断器,并且用于若干相位的真空中断器由普通操作机构同时致动或由可分离的操作机构单独地或独立地致动。电极通常可以占据三个位置:闭合、断开和接地。
当电极处于闭合位置时,触点构件处于电连通,并且电流过其中。在此构型中,电极变热。热量首先在电极的引线柱中生成。也就是说,引线柱是长形的并且通常具有比触点构件小的截面面积。因而,流过引线柱的电产生热量和电阻。所生成的热量和电阻的量是引线柱的截面面积和电流量的函数。也就是说,较小电极和/或较高电流生成更多热量。相应地,使用传统电极,为了具有额定更高电流的断路器,电极必须更大。
然而,较大电极具有若干缺点。例如,较大电极更昂贵并且需要更稳健的操作机构,所述更稳健的操作机构还是更昂贵的。进一步地,较大/更稳健的操作机构需要更多能量来操作并且因此使用也更昂贵。通过实例的方式,长形可动触点组合件引线柱具有需要更大/更稳健的操作机构的相当大的质量。如果长形可动触点组合件引线柱质量较小,则可以利用较不稳健的操作机构。
因此,需要生成减少的量的热量和电阻的电极。还需要一种真空断路器,其中可以改变真空中断器组合件的操作特性,而不从真空中断器组合件移除可动触点组合件。还需要一种真空断路器,所述真空断路器包含具有减小的质量的致动器连杆构件本体。还需要用于可动触点的引线柱,所述引线柱具有减小的长度和相关联的质量。
发明内容
这些需要和其它需要通过所公开的和所要求保护的概念的至少一个实施例来满足,所述至少一个实施例提供了一种真空中断器组合件,所述真空中断器组合件包含操作机构、包含许多波纹管组合件的真空室、包含第一触点组合件和第二触点组合件的导体组合件,所述第一触点组合件包含引线柱和触点构件,所述第一触点组合件引线柱包含长形本体,所述长形本体具有第一近端、中间部分和第二远端,所述第一触点组合件触点被耦联到所述第一触点组合件引线柱本体第二端并且与其电连通,所述第一触点组合件触点被安置在所述真空室中,所述第二触点组合件包含引线柱和触点构件,所述第二触点组合件引线柱包含长形本体,所述长形本体具有第一近端、中间部分和第二远端,所述第二触点组合件触点被耦联到所述第二触点组合件引线柱本体第二端并且与其电连通,所述第二触点组合件触点被安置在所述真空室中,所述操作机构可操作地耦联到所述第一触点组合件引线柱本体第一端,其中所述第一触点组合件触点被构造成在第一位置与第二位置之间移动,在所述第一位置中,所述第一触点组合件触点不直接耦联到所述第二触点组合件触点,在所述第二位置中,所述第一触点组合件触点被耦联到所述第二触点组合件触点并且与其电连通,并且其中所述第一触点组合件引线柱本体具有减小的长度。具有减小的长度的所述第一触点组合件引线柱本体生成较少的热量和电阻。
由于使用了安置在密封件杯内部的挠性连接组合件,因此第一触点组合件引线柱本体具有减小的长度。也就是说,挠性连接组合件的使用及其处于第一触点组合件与相关联的端子之间的位置允许第一触点组合件引线柱本体具有减小的长度。也就是说,挠性连接组合件的使用和位置解决了上述问题。进一步地,在第一触点组合件引线柱本体具有减小的长度的情况下,操作机构包含长形致动器连杆构件,所述长形致动器连杆构件将第一触点组合件引线柱本体耦联到操作机构。也就是说,所公开的概念包含具有减小的质量的长形致动器连杆构件本体,而不是具有大量长形铜引线柱的长形致动器连杆构件本体。这个构型还解决了上述问题。
附图说明
当结合附图阅读时,可以从以下优选实施例的描述获得对本发明的充分理解,在所述附图中:
图1是真空断路器的示意性部分截面侧视图。
图2是真空断路器的示意性部分截面前视图。
图3是真空中断器组合件的截面前视图。
图4A是防旋转组合件的一个实施例的示意性顶视图。图4B是防旋转组合件的另一个实施例的示意性顶视图。图4C是防旋转组合件的另一个实施例的示意性顶视图。图4D是防旋转组合件的另一个实施例的示意性顶视图。
图5是挠性连接组合件的示意性截面侧视图。
图6A是挠性连接组合件的一个实施例的等距视图。图6B是挠性连接组合件的另一个实施例的等距视图。图6C是挠性连接组合件的另一个实施例的等距视图。图6D是挠性连接组合件的另一个实施例的等距视图。
图7是所公开的方法的流程图。
图8是具有两个可动触点组合件的替代性实施例的截面视图。
具体实施方式
应了解,本文中附图中展示的和以下说明书中描述的特定元件仅是所公开的概念的示例性实施例,出于说明性目的,所述示例性实施例作为非限制性实例提供。因此,所使用的部件的具体大小、取向、组装、数量、实施例构型以及与本文中所公开的实施例相关的其它物理特性不应当被认为限制所公开的概念的范围。
本文中所使用的方向短语,如例如顺时针、逆时针、左边、右边、顶部、底部、向上、向下及其派生词,与附图中示出的元件的取向相关并且除非在本文中明确阐述,否则不限制权利要求书。
如本文中所使用的,除非上下文清楚地另外指明,单数形式“一个”、“一种”以及“所述”包含复数指代物。
如本文中所使用的,表述两个或多个部分或部件“耦联”应意味着只要连结发生,部分就直接地或间接地结合在一起或一起操作,即通过一个或多个中间部分或部件。如本文中所使用的,“直接耦联”是指两个元件彼此直接接触。如本文中所使用的,“固定地耦联”或“固定”是指两个部件耦联以一体地移动,同时维持相对于彼此的恒定取向。相应地,当两个元件耦联时,那些元件的所有部分被耦联。然而,耦联到第二元件的第一元件的特定部分的描述,例如耦联到第一轮的第一轴端,是指第一元件的特定部分被安置成比其其它部分更接近第二元件。进一步地,除非上部物体以其它方式大体上维持在位,否则搁置在仅通过重力固持在位的另一个物体上的物体不被“耦联”到下部物体。也就是说,例如,桌上的书不与其耦联,但胶合到桌上的书与其耦联。
如本文中所使用的,短语“可移除地耦联”是指一个部件与另一个部件以基本上临时的方式耦联。也就是说,两个部件被耦联的方式使得部件的连结或分离容易并且将不损坏部件。例如,用固定数量的易于触及的紧固件,即不难触及的紧固件,固定到彼此的两个部件是“可移除地耦联”的,而焊接在一起或通过难以触及的紧固件连结的两个部件不是“可移除地耦联”的。“难以触及的紧固件”是在触及紧固件之前需要移除一个或多个其它部件的紧固件,其中“其它部件”不是进入装置,如但不限于门。
如本文中所使用的,“可操作地耦联”是指许多元件或组合件耦联,使得随着第一元件从一个位置/构型移动到另一个位置/构型,第二元件也在位置/构型之间移动,所述元件或组合件中的每一个可在第一位置与第二位置或第一构型与第二构型之间移动。应注意,第一元件可以“可操作地耦联”到另一个元件,而相反情况不成立。
如本文中所使用的,“耦联组合件”包含两个或多个耦联器或耦联部件。耦联器或耦联组合件的部件通常不是相同元件或其它部件的一部分。因而,在以下说明中可以不同时描述“耦联组合件”的部件。
如本文中所使用的,“耦联器”或“一个或多个耦联部件”是耦联组合件的一个或多个部件。也就是说,耦联组合件包含至少两个部件,所述至少两个部件被构造成彼此耦联。应理解的是,耦联组合件的部件彼此兼容。例如,在耦联组合件中,如果一个耦联部件是卡扣插头,则另一个耦联部件是卡扣插塞,或者如果一个耦联部件是螺栓,则另一个耦联部件是螺母。
如本文中所使用的,“对应”表明两个结构部件的大小被设定为并且被成形为彼此类似并且可以以最小的摩擦量耦联。因此,“对应”于构件的开口的大小被设定为略大于构件,使得构件可以以最小的摩擦量穿过开口。如果两个部件“紧密地”配合在一起,则这个定义被修改。在此情况下,部件的大小之间的差异甚至更小,由此摩擦量增大。如果限定开口的元件和/或插入开口中的部件由可变形或可压缩的材料制成,则开口甚至可能比插入开口中的部件略小。关于表面、形状和线条,两个或多个“对应的”表面、形状或线条具有总体上相同的大小、形状和轮廓。
如本文中所使用的,表述两个或多个部分或部件彼此“接合”应当意味着元件施加力或直接或通过一个或多个中间元件或部件彼此偏置。进一步地,如本文中所使用的,关于移动部分,移动部分可以在从一个位置到另一个位置运动期间“接合”另一个元件和/或一旦处于所描述的位置就可以“接合”另一个元件。因此,应当理解的是,表述“当元件A移动到元件A第一位置,元件A接合元件B”和“当元件A处于元件A第一位置,元件A接合元件B”是等效表述并且意味着元件A在移动到元件A第一位置时接合元件B和/或元件A在处于元件A第一位置时接合元件B。
如本文中所使用的,“可操作地接合”是指“接合和移动”。也就是说,当相对于被构造成移动可移动或可旋转的第二部件使用时,“可操作地接合”是指第一部件施加足以使第二部件移动的力。例如,螺丝刀可以被放置成与螺钉接触。当不对螺丝刀施加力时,螺丝刀仅“耦联”到螺钉。如果轴向力被施加到螺丝刀,则螺丝刀压靠螺钉并且“接合”螺钉。然而,当旋转力被施加到螺丝刀时,螺丝刀“可操作地接合”螺钉并且使螺钉旋转。进一步地,在电子部件的情况下,“可操作地接合”是指一个部件通过控制信号或电流控制另一个部件。
如本文中所使用的,词语“整体”是指作为单件或单元创建的部件。也就是说,包含单独创建并且然后作为单元耦联在一起的件的部件不是“整体”部件或整体。
如本文中所使用的,术语“数量”应该指一个或多于一个的整数(即,多个)。
如本文中所使用的,如“围绕[元件、点或轴线]安置”或“围绕[元件、点或轴线]延伸”或“围绕[元件、点或轴线][X]度”等短语中的“围绕”是指环绕、围绕……延伸或围绕……测量。当参照度量或以类似的方式使用时,“约”意味着“大约”。
如本文中所使用的,“相关联的”是指元件是相同组合件的一部分和/或一起操作或以某种方式相互起作用/奏效。例如,汽车具有四个轮胎和四个毂盖。虽然所有元件作为汽车的一部分耦联,但是应当理解的是,每个毂盖与特定轮胎“相关联”。
如本文中所使用的,在短语“[x]在其第一位置与第二位置之间移动”或“[y]被构造成在其第一位置与第二位置之间移动[x]”中,“[x]”是元件或组合件的名称。进一步地,当[x]是在许多位置之间移动的元件或组合件时,代词“其”是指“[x]”,即代词“其”前面的命名的元件或组合件。
如本文中所使用的,“被构造成[动词]”意味着所标识的元件或组合件具有被成形为、大小被设定为、安置成、耦联成和/或配置成执行所标识的动词的结构。例如,“被构造成移动”的构件被可移动地耦联到另一个元件并且包含使构件移动的元件或者构件以其它方式被配置成响应于其它元件或组合件移动。因而,如本文中所使用的,“被构造成[动词]”叙述结构而不是功能。进一步地,如本文中所使用的,“被构造成[动词]”意味着所标识的元件或组合件旨在并且被设计成执行所标识的动词。因此,仅能够执行所标识的动词但不旨在并且不被设计成执行所标识的动词的元件不“被构造成[动词]”。
参考图1和图2,展示了结合真空中断器组合件30的真空断路器10。如已知的,真空断路器10可以是单极或多极真空断路器10。在下文中,并且作为示例性实施例,将仅讨论单极。然而,应理解的是,权利要求不限于仅具有单极的实施例。通常,在示例性实施例中,真空断路器10包含低压部分12和高压部分14。低压部分12包含壳体16,所述壳体被构造成包含控制装置(未示出),如但不限于用于手动操作真空断路器10并且将(下文讨论的)触点组合件150、160的状态改变为断开或闭合状况的断路器组合件和/或控制面板。低压部分12经由支座支撑件18可操作地耦联到高压部分14。高压部分14包含线路端子20、负载端子22和真空中断器组合件30。线路端子20被构造成耦联到并且被耦联到线路(未示出)并且包含固定耦联器21。负载端子22被构造成耦联到并且被耦联到负载(未示出)并且包含固定耦联器23。线路端子20和/或负载端子22中的任一者或两者包含示意性地示出的散热器26。在示例性实施例中,线路端子耦联器21和负载端子耦联器23处于“固定”位置。也就是说,如本文中参照电端子耦联器21、23所使用的,“固定”意味着在真空断路器10的操作期间,端子20、22的电导耦联器21、23不相对于真空断路器10的其它元件移动。如所示出的,在示例性实施例中,高压部分14的元件由绝缘杆19支撑。
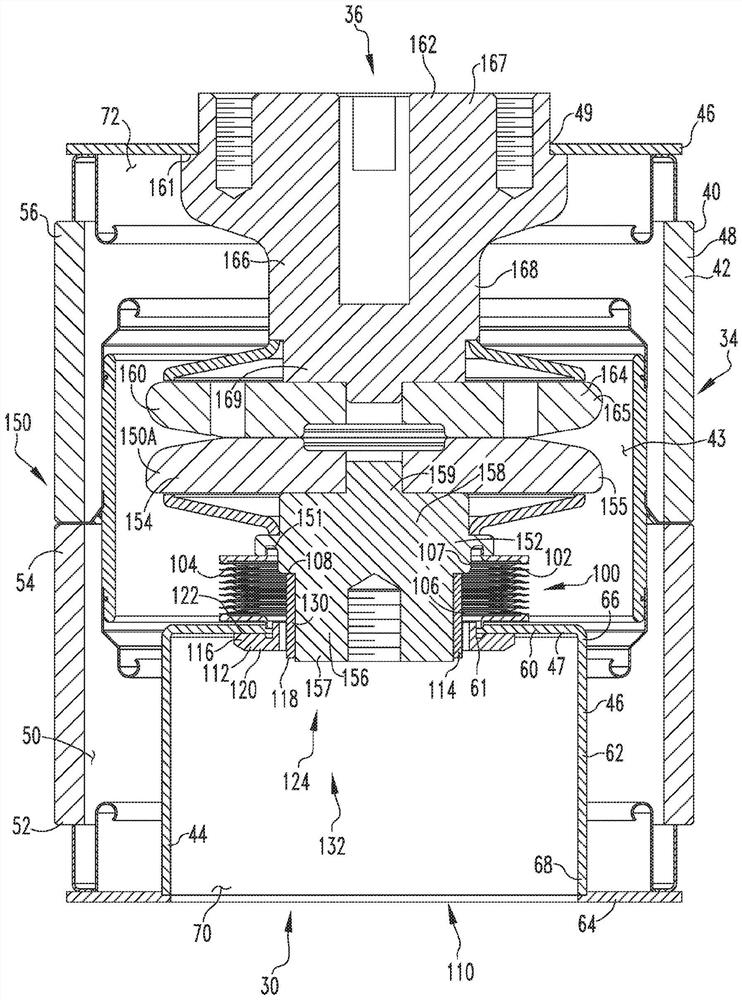
如图3和示例性实施例中所示出的,真空中断器组合件30包含操作机构32(示意性地示出,图1)、真空室34和导体组合件36。如以下所讨论的,操作机构32被构造成在第一位置与第二位置之间移动许多可动触点组合件150A、150B并且确实在所述第一位置与所述第二位置之间移动所述许多可动触点组合件,在所述第一位置中,每个可动触点组合件150A、150B与另一个触点150A、150B、160间隔开并且不与其电连通,在所述第二位置中,每个可动触点150A、150B被耦联到另一个触点150A、150B、160并且与其电连通。
在示例性实施例中,操作机构32包含具有本体39的致动器连杆构件38。如本文所使用的,“致动器连杆构件”是操作机构32的最大连杆构件,所述最大连杆构件为下文讨论的可动触点组合件150赋予运动。致动器连杆构件38被构造成可操作耦联到并且可操作地耦联到可动触点组合件150或可动触点组合件150A、150B,并且被构造成在下文描述的第一位置与第二位置之间移动可动触点组合件150。也就是说,致动器连杆构件38为可动触点组合件150赋予机械运动。在示例性实施例中,致动器连杆构件38由非导电材料或导电与非导电材料的组合制成。致动器连杆构件38具有“减小的质量”。如本文所使用的,并且关于在致动器连杆构件38由非导电材料或导电与非导电材料的组合制成的实施例中,“减小的质量”意味着致动器连杆构件具有比由导电材料制成并且具有基本上相似尺寸的致动器连杆构件小约30%到90%之间或小约60%的质量。在另一个示例性实施例中,致动器连杆构件38由导电材料制成。在致动器连杆构件38由导电材料制成的实施例中,致动器连杆构件38仍可以具有“减小的质量”。也就是说,在致动器连杆构件38由导电材料制成的实施例中,“减小的质量”意味着致动器连杆构件具有相对于现有技术致动器连杆构件在约30%到90%之间或约60%的质量,所述现有技术致动器连杆构件被构造成在操作机构32的元件与可动触点组合件150之间延伸。通过提供具有减小的直径或长度的致动器连杆构件38来实现质量减小。在包含具有“减小的质量”的“减小的质量”致动器连杆构件38的实施例中,质量的减小解决了上述问题。
真空室34包含壳体组合件40,所述壳体组合件包含侧壁42和许多密封件杯44、46。在示例性实施例中,侧壁42是中空、大致圆柱形的本体48。在此构型中,真空室壳体组合件侧壁42限定了总体上封闭的空间50,下文被称为“真空室封闭空间50”。进一步地,真空室壳体组合件侧壁42具有第一端52、中间部分54和第二端56。在此构型中,壳体组合件40具有从真空室壳体组合件侧壁第一端52到真空室壳体组合件侧壁第二端56测量的长度。
在示例性实施例中,存在第一密封件杯44和第二密封件杯46。在示例性实施例中,与可动触点组合件150相关联的每个密封件杯44'、46'包含大致圆形的平坦部分60、总体上垂直于相关联的密封件杯平坦部分60的平面延伸的侧壁62、以及总体上平行于相关联的密封件杯平坦部分60的平面延伸的凸缘64。在示例性实施例中,密封件杯平坦部分60包含中心开口61,所述中心开口总体上被安置在大致圆形的密封件杯平坦部分60的中心处。在示例性实施例中,密封件杯侧壁62从大致圆形的密封件杯平坦部分60的周边延伸,并且因而是大致圆柱形的。密封件杯侧壁62包含耦联到密封件杯平坦部分60的近端66和与密封件杯侧壁近端66相对的远端68。在示例性实施例中,密封件杯凸缘64从密封件杯侧壁远端68径向地向外延伸。
下文所描述的与固定触点组合件160相关联的第二密封件杯46包含限定中心开口49的大致平坦的环面形本体47。第二密封件杯本体开口49的大小被设定成与固定第二触点组合件引线柱本体中间部分168的截面积紧密地对应。
在示例性实施例中,每个密封件杯44、46是整体。进一步地,在此构型中,每个密封件杯44、46分别限定了总体上封闭的空间70、72。应该注意的是,虽然密封件杯44、46是类似的,但是与相关联的密封件杯46的密封件杯侧壁62相比,即邻近固定触点160安置的密封件杯的密封件杯侧壁,相关联的密封件杯44的密封件杯侧壁62,即邻近可动触点150安置的密封件杯的密封件杯侧壁,具有相对于密封件杯平坦部分60更高的高度。
每个密封件杯44、46被密封地耦联到真空室壳体组合件侧壁42。在示例性实施例中,与可动触点组合件150相关联的每个密封件杯44以倒置的取向安置在真空室壳体组合件侧壁42中。也就是说,如本文所使用的,当参照杯形密封件使用时,“以倒置的取向”是指由密封件杯44限定的总体上封闭的空间50被大体上安置在真空室封闭空间43内。每个密封件杯凸缘64被密封地耦联到真空室壳体组合件侧壁42。也就是说,如所示出的,第一密封件杯44被安置在真空室壳体组合件侧壁第一端52处,并且第二密封件杯46被安置在真空室壳体组合件侧壁第二端56处。
如下文所讨论的,真空中断器组合件30的一个实施例包含两个可动触点组合件150A、150B。然而,在第一实施例中,存在单个可动触点组合件150A。如已知的,为了容纳可动触点组合件150A,真空室34包含允许可动触点移动的元件。在示例性实施例中,允许可动触点移动的元件是波纹管组合件100。在示例性实施例中,波纹管组合件100是金属焊接波纹管102。如已知的,用于真空室34的波纹管包含大致圆柱形的侧壁,所述侧壁具有限定许多波纹的手风琴状形状。如本文所使用的,“单缝波纹管”包含浇铸或成形有许多波纹的侧壁,侧壁然后被形成为大致圆柱形的形状,并且端部沿单个接缝被焊接在一起。如本文所使用的,“金属焊接波纹管”包含许多总体上平坦的环面状本体构件和许多环面状弹簧构件;所述弹簧构件通常从一个本体构件的外边缘延伸到相邻的本体构件的内边缘。在此构型中,弹簧构件和本体构件限定许多波纹。弹簧构件密封地耦联,如但不限于通过将弹簧构件焊接到本体构件上。应当理解的是,弹簧构件和本体构件是大致环面形的,所述构件可以包含用于增强金属焊接波纹管的弹性的形状。在具有单个可动触点150的示例性实施例中,第一波纹管组合件100A与第一可动触点150A相关联。
每个波纹管组合件100包含具有第一端106、第二端107的本体104,并且限定通路108。如上文所描述的,在示例性实施例中,波纹管组合件本体104是大致圆柱形的并且包含许多波纹。因此,波纹管组合件本体通路108在最小内半径与最大内半径之间交替。
在示例性实施例中,每个波纹管组合件100包含抗扭转套管组合件110。套管组合件110包含套环部分112和护套部分114。在示例性实施例中,抗扭转套管组合件套环部分112包含大致平坦的本体116,所述本体限定大致圆形的中心开口118。套管组合件套环部分本体中心开口118总体上对应于下文所讨论的第一触点组合件引线柱本体第一端157。在示例性实施例中,套管组合件套环部分本体116也是大致圆形的并且具有比密封件杯平坦部分中心开口61大的半径。进一步地,在示例性实施例中,套管组合件套环部分本体116包含第一平坦表面120、相对的第二平坦表面122和在它们之间延伸的多个流体通路124。如所示出的,并且在示例性实施例中,套管组合件套环部分本体流体通路124以关于套管组合件套环部分本体中心开口118的中心总体上对称的式样安置。应当理解的是,术语“关于中心对称”涉及旋转对称。
套管组合件护套部分114包含中空、大致圆柱形的本体130。套管组合件护套部分本体130限定通路132,所述通路的大小被设定成与总体上对应于下文所讨论的第一触点组合件引线柱本体第一端157和第一触点组合件引线柱本体中间部分158。套管组合件护套部分本体130围绕,即总体上环绕,套管组合件套环部分本体中心开口118安置,并且与其邻接。在示例性实施例中,套管组合件110是整体。也就是说,套管组合件套环部分112和套管组合件护套部分114是整体的。
套管组合件110进一步包含防旋转组合件134。防旋转组合件134包含第一触点组合件引线柱本体第一端157和/或第一触点组合件引线柱本体中间部分158上的部件,出于讨论的目的,所述第一触点组合件引线柱本体第一端和/或所述第一触点组合件引线柱本体中间部分被标识为防旋转组合件134的一部分。防旋转组合件134被构造成抵抗并且在示例性实施例中防止套管组合件110相对于第一触点组合件引线柱152旋转。如图4A到图4D中所示出的,防旋转组合件134包含非圆形元件136,所述非圆形元件被耦联到或形成为第一触点组合件引线柱本体第一端157和/或第一触点组合件引线柱本体中间部分158的一部分。进一步地,套管组合件套环部分112和/或护套部分114限定与防旋转组合件非圆形元件136对应的腔138。例如,防旋转组合件非圆形元件136可以是耦联到第一触点组合件引线柱152的螺母136'(图4A)、结合到第一触点组合件引线柱152中的非圆形部分136"(图4B)、或耦联到或结合到第一触点组合件引线柱152中的凸耳136"'(图4C)。可替代地,如图4D中所示出的,第一触点组合件引线柱152和抗扭转套管组合件套环部分本体开口118和/或套管组合件护套部分本体通路132各自限定摩擦表面139。应当理解的是,当套管组合件110被安置在第一触点组合件引线柱152上时,防旋转组合件134的部件耦联、直接耦联或固定到彼此,并且抵抗或防止套管组合件110相对于第一触点组合件引线柱152旋转。
应当理解的是,在具有两个可动触点组合件150A、150B的实施例中,存在两个波纹管组合件,即,如上文所描述的第一波纹管组合件100A和第二波纹管组合件100B(图8)。也就是说,在具有两个可动触点组合件150A、150B(图8)的实施例中,存在第二波纹管组合件100B。将不在本文中详细描述第二波纹管组合件100B,但应当理解的是,第二波纹管组合件100B'基本上类似于第一波纹管组合件100A。
导体组合件36包含真空中断器组合件30的导电元件。在示例性实施例中,导体组合件36包含第一触点组合件150A、第二触点组合件150B(图8)或第二触点组合件160(图3)以及多个挠性连接组合件200。在示例性实施例中,第一触点组合件150A可相对于真空室34移动,而第二触点组合件160相对于真空室34是静止的。在下文所讨论的另一个实施例中,第一触点组合件150A和第二触点组合件150B两者可相对于真空室34移动。因此,对于下文即将讨论的实施例,如本文所使用的,第一触点组合件150A是“可动第一触点组合件150A”或可替代地“可动触点组合件150”。相反地,对于下文即将讨论的实施例,如本文所使用的,第二触点组合件160是“固定第二触点组合件160”或可替代地“固定触点组合件160”。在包含下文进一步讨论的两个可动触点组合件的另一个实施例中,如本文所使用的,第一触点组合件150是“可动第一触点组合件150A”。进一步地,在包含两个可动触点组合件的实施例中,第二触点组合件160通过附图标记150B交替地标识,并且是如本文所使用的“可动第二触点组合件150B”。
每个触点组合件150、160包含引线柱152、162和触点构件154、164。每个触点组合件引线柱152、162包含长形本体156、166。每个触点组合件引线柱本体156、166包含第一近端157、167、中间部分158、168和第二远端159、169。在示例性实施例中,每个触点组合件引线柱本体156、166具有大致圆形的截面。在示例性实施例中,每个触点组合件触点构件154、164包含大致圆形的盘状本体155、165。每个触点组合件引线柱152、162和触点组合件触点构件154、164由导电材料制成,如但不限于铜。第一触点组合件触点构件154被耦联到第一触点组合件引线柱第二端159并且与其电连通。第二触点组合件触点构件164被耦联到第二触点组合件引线柱第二端169并且与其电连通。
进一步地,在示例性实施例中,每个触点组合件引线柱本体156、166包含许多“凸缘”151、161。如本文所使用的,触点组合件引线柱本体156、166上的“凸缘”的半径变化,由此在触点组合件引线柱本体156、166上形成总体上径向延伸的表面。半径变化可以是半径增加或半径减小。触点组合件引线柱本体凸缘151、161用作安装表面和/或耦联表面。
在示例性实施例中,通过利用如下文所描述的金属焊接波纹管102和第一挠性连接组合件200A,可动第一触点组合件引线柱152具有“减小的长度”。如本文所使用的,关于触点组合件引线柱的“减小的长度”意味着引线柱的长度是壳体组合件40的长度的0%到小于50%之间。第一触点组合件引线柱152的减小的长度和相关联的质量减少解决了上述一个或多个问题。
如图5中所示出的,挠性连接组合件200与每个可动触点150A、150B相关联。因此,在具有单个第一可动触点150A的实施例中,存在单个第一挠性连接组合件200A。在示例性实施例中,第一挠性连接组合件200A包含固定耦联器202A和可动耦联器204A。在示例性实施例中,第一挠性连接组合件固定耦联器202A是具有第一半径、直径或宽度的导电体206A。在一个实施例中,第一挠性连接组合件固定耦联器本体206A是大致环面的(图6A到图6B)。在另一个实施例中,第一挠性连接组合件固定耦联器本体206A是大致星形的,但限定了中心开口(未示出)。也就是说,第一挠性连接组合件固定耦联器本体206A在两个实施例中限定了中心开口。第一挠性连接组合件可动耦联器204A是具有第二半径、直径或宽度的导电体208A。在示例性实施例中,第二半径、直径或宽度小于第一半径、直径或宽度。在图5和图6C中示出的示例性实施例中,第一挠性连接组合件可动耦联器导电体208A是具有下环面207A和上环面209A的整体的分层环面构造。在其它实施例中,如图6D中所示出的,第一挠性连接组合件可动联耦联器导电体208A包含六边形部分205A和上环面209A。
第一挠性连接组合件固定耦联器202A和第一挠性连接组合件可动耦联器204A彼此耦联和电连通。也就是说,在示例性实施例中,第一挠性连接组合件200A进一步包含许多柔性导体210A。在另一个实施例中,第一挠性连接组合件200A进一步包含多个柔性导体210A。每个第一挠性连接组合件柔性导体210A包含第一端212A和第二端214A。每个第一挠性连接组合件柔性导体第一端212A耦联到第一挠性连接组合件固定耦联器202A并且与其电连通。每个第一挠性连接组合件柔性导体第二端214A耦联到第一挠性连接组合件可动耦联器204A并且与其电连通。在示例性实施例中,第一挠性连接组合件柔性导体210A围绕,即总体上环绕,选定的点安置。在示例性实施例中,第一触点组合件引线柱本体第一端包含中心“C”,并且许多第一挠性连接组合件柔性导体210A围绕第一触点组合件引线柱本体第一端中心“C”安置。如图6A到图6D中所示出的,许多第一挠性连接组合件柔性导体210A可以具有若干构型,如但不限于螺旋构件220A(图6A)、锥形构件222A(图6B)、(横截面)圆柱形的弯曲构件224A(图6C)或(横截面)矩形的弯曲构件226A(图6D)。
应进一步注意,挠性连接组合件200的构型,如但不限于第一挠性连接组合件固定耦联器本体206A的大小、第一挠性连接组合件可动耦联器导电体208A的大小、柔性导体210A的数量、柔性导体210A的大小和/或形状,影响挠性连接组合件200的特性,这进而影响真空室34的特性。具有挠性连接组合件200的真空室34的特性包含:作为连续额定电流的高达约10,000A的承载电流;高达约100Ka持续3s的峰值耐受电流以及高达约274Ka的峰值接通电流。在导体组合件36的任何元件没有任何脱钎或变形的情况下,这些特性进一步发生。
在此构型中,挠性连接组合件200被构造成在两种构型(第一构型与第二构型)之间移动,在所述第一构型中,第一挠性连接组合件可动耦联器导电体208A被安置成更接近第一挠性连接组合件固定耦联器本体206A,在所述第二构型中,第一挠性连接组合件可动耦联器导电体208A与第一挠性连接组合件固定耦联器本体206A间隔开。应当理解的是,“更接近”和“间隔开”是相对术语,这意味着当挠性连接组合件200处于第一构型时,与处于第二构型的挠性连接组合件200相比,第一挠性连接组合件可动耦联器导电体208A被安置成更接近第一挠性连接组合件固定耦联器本体206A。相反地,当挠性连接组合件200处于第二构型时,与处于第一构型的挠性连接组合件200相比,第一挠性连接组合件可动耦联器导电体208A被安置成距第一挠性连接组合件固定耦联器本体206A更远,即,与所述第一挠性连接组合件固定耦联器本体间隔开。
在一个示例性实施例中,挠性连接组合件200被构造成固定到并且被固定到相关联的触点组合件150、160,并且更具体地固定到相关联的引线柱152、162。挠性连接组合件200可以例如被钎焊或被焊接到相关联的引线柱152、162。在另一个示例性实施例中,挠性连接组合件200被构造成可移除地耦联到并且被可移除地耦联到相关联的触点组合件150、160,并且更具体地耦联到相关联的引线柱152、162。在此实施例中,挠性连接组合件200可以例如通过可移除的耦联器来耦联到相关联的引线柱152、162,所述可移除的耦联器如但不限于带螺纹的耦联部件(未示出)。这种带螺纹的耦联部件被安置在易于访问的位置。例如,被构造成耦联可动耦联器204A和第一触点组合件引线柱152的可移除耦联器(未示出)被安置成基本上处于可动耦联器204A的下侧的中心。通过中心开口216A(图5)来容易地访问这种可移除耦联器。进一步地,在示例性实施例中,第一挠性连接组合件固定耦联器本体206A包含带螺纹的通路或孔218A。在此示例性实施例中,负载端子22包含紧固件访问通路28(图2)。应当理解的是,带螺纹的耦联部件(未示出)穿过负载端子访问通路28并且穿入第一挠性连接组合件固定耦联器本体孔218A中。
在示例性实施例中,具有一个可动触点组合件150的真空中断器组合件30组装如下。第一波纹管组合件100A密封地耦联到第一密封件杯44。在示例性实施例中,第一波纹管组合件本体第一端106被焊接到密封件杯平坦部分60处的第一密封件杯44,波纹管组合件本体通路108围绕密封件杯中心开口61安置。第一波纹管组合件100A不在密封件杯封闭空间70内。也就是说,第一波纹管组合件100A密封地耦联到与密封件杯封闭空间70相对的一侧上的密封件杯平坦部分60。
第一触点组合件引线柱152以及示例性实施例中的第一触点组合件引线柱本体第一端157和中间部分158穿过波纹管组合件本体通路108和密封件杯中心开口61。第一触点组合件触点构件154不在密封件杯封闭空间70内。第一触点组合件引线柱本体中间部分158或第二端159包含凸缘151。波纹管组合件本体第二端107密封地耦联到凸缘151处的第一触点组合件引线柱本体中间部分158或第二端159。
套管组合件110被安置在第一触点组合件引线柱152上。也就是说,第一触点组合件引线柱152延伸穿过套管组合件套环部分本体中心开口118和套管组合件护套部分本体通路132。如上所述,防旋转组合件134的部件耦联、直接耦联或固定到彼此,并且抵抗或防止套管组合件110相对于第一触点组合件引线柱152旋转。套管组合件110被安置在第一触点组合件引线柱本体中间部分158处并且延伸穿过第一密封件杯平坦部分60。也就是说,套管组合件套环部分本体116被安置在真空室封闭空间50中,套管组合件护套部分本体130延伸穿过套管组合件套环部分本体中心开口118。进一步地,在示例性实施例中,套管组合件套环部分本体116在密封件杯封闭空间70内耦联、直接耦联或固定到密封件杯平坦部分60。
第一密封件杯凸缘64以及示例性实施例中的第一杯密封件杯凸缘64的外周边密封地耦联到真空室壳体组合件侧壁第一端52。在示例性实施例中,第一密封件杯凸缘64被焊接到真空室壳体组合件侧壁第一端52。进一步地,如上文所描述的,第一密封件杯44以倒置的取向安置在真空室壳体组合件侧壁42中。
固定触点组合件160如下耦联到第二密封件杯46。第二触点组合件引线柱本体166穿过第二密封件杯本体开口49。第二触点组合件引线柱本体166密封地耦联到第二密封件杯本体47。在示例性实施例中,第二触点组合件引线柱本体166被焊接到第二密封件杯本体47。第二密封件杯46密封地耦联到真空室壳体组合件侧壁第二端56。在示例性实施例中,第二密封件杯本体47被焊接到真空室壳体组合件侧壁第二端56。
在此构型中,真空室封闭空间50被密封并且可以在其中创建真空。也就是说,真空室壳体组合件侧壁第二端56密封地耦联到第二密封件杯46,所述第二密封件杯进而密封地耦联到第二触点组合件引线柱本体166。此构型密封了真空室壳体组合件侧壁第二端56。第一密封件杯44密封地耦联到真空室壳体组合件侧壁第一端52。波纹管组合件100密封地耦联到第一密封件杯44和第一触点组合件引线柱本体中间部分158或第二端159。此构型密封了真空室壳体组合件侧壁第一端52。因此,真空室封闭空间50被密封。应当理解的是,真空组合件(未示出)允许在真空室封闭空间50中创建真空或近真空条件。
进一步地,在此构型中,第一波纹管组合件100A被配置为“加压波纹管”。也就是说,当可动触点组合件引线柱152穿过波纹管组合件100时,可动触点组合件引线柱152与波纹管组合件本体104之间存在限定的空间;这个限定的空间也是波纹管组合件本体通路108。取决于波纹管组合件100密封地耦联到可动触点组合件引线柱152的位置,波纹管组合件本体通路108与真空室封闭空间50或大气流体连通。也就是说,如果波纹管组合件100密封地耦联到邻近第一触点组合件引线柱第二端159的可动触点组合件引线柱152,则波纹管组合件本体通路108总体上与大气流体连通。如本文所使用的,总体上与大气流体连通的波纹管组合件本体通路108是“加压波纹管”因为大气对波纹管进行加压。相反地,如果波纹管组合件100密封地耦联到邻近第一触点组合件引线柱第一端157的可动触点组合件引线柱152,则波纹管组合件本体通路108总体上与真空室封闭空间50流体连通。如本文所使用的,总体上与真空室封闭空间50流体连通的波纹管组合件本体通路108是“真空波纹管”因为波纹管组合件本体通路108还经受真空。应该注意的是,本文中公开的加压波纹管允许波纹管组合件本体通路108与套管组合件套环部分本体流体通路124流体连通。
真空室34耦联、直接耦联或固定到低压部分壳体16。如所示出的,在示例性实施例中,真空室34经由支座支撑件18与低压部分壳体16间隔开。线路端子20和负载端子22也在支座支撑件18处耦联、直接耦联或固定到低压部分壳体16。线路端子20经由固定耦联器21耦联到固定触点组合件160并且与其电连通。也就是说,线路端子20经由固定耦联器23和挠性连接组合件200耦联到固定第二触点组合件第一近端167并且与其电连通。
可动第一触点组合件150A经由挠性连接组合件200耦联到负载端子22和操作机构32。也就是说,在示例性实施例中,第一挠性连接组合件200A临时耦联到第一触点组合件150A、负载端子22和操作机构32中的每一个。在另一实施例中,第一挠性连接组合件200A耦联、直接耦联或固定到第一触点组合件150A、负载端子22和操作机构32中的每一个。在示例性实施例中,在安装时,第一挠性连接组合件200A被安置在第一密封件杯封闭空间70中。应该注意的是,此构型有助于解决过长的移动触点组合件触点引线柱的问题。
也就是说,在示例性实施例中,第一挠性连接组合件200A被安置在第一密封件杯封闭空间70中,第一挠性连接组合件固定耦联器202A临时耦联到负载端子22并且与其电连通。第一挠性连接组合件可动耦联器204A临时耦联到第一触点组合件引线柱本体第一近端157并且与其电连通。进一步地,致动器连杆构件38延伸穿过第一挠性连接组合件固定耦联器导电体206A并且可操作地耦联到第一挠性连接组合件可动耦联器204A。致动器连杆构件38进一步可操作地耦联到操作机构32。
在此构型中,真空断路器10如下操作。对于此实例,假设可动第一触点组合件150A处于第二位置,在所述第二位置中,第一触点组合件150A直接耦联到固定第二触点组合件160并且与其电连通。也就是说,在真空室34内,第一触点组合件触点构件154和第二触点组合件触点构件164直接耦联。
在从控制装置接收到信号时,操作机构32将可动第一触点组合件150A移动到第一位置,在所述第一位置中,第一触点组合件150A直接耦联到固定第二触点组合件160并且与其电连通。在此操作期间,挠性连接组合件200从第二构型移动到第一构型,在所述第二构型中,第一挠性连接组合件可动耦联器导电体208A与第一挠性连接组合件固定耦联器本体206A间隔开,在所述第一构型中,第一挠性连接组合件可动耦联器本体208A被安置成更接近第一挠性连接组合件固定耦联器本体206A。在闭合操作期间,上文所讨论的元件的运动是颠倒的。也就是说,元件从它们的第一位置/构型移动到它们的第二位置/构型。
而且,第一挠性连接组合件200A可以被替换为另一个第一挠性连接组合件200A,从而改变真空室34的操作特性。也就是说,如图7所示,利用如上文所描述的真空电路中断器10的方法包含提供1000“安装的第一挠性连接组合件200A'”。如本文所使用的,“安装的第一挠性连接组合件200A'”是指目前安装并且耦联到如上文所描述的真空电路中断器10的第一挠性连接组合件200A。安装的第一挠性连接组合件200A'具有第一组特性。进一步地,安装的第一挠性连接组合件包含固定耦联器和可动耦联器,其中安装的第一挠性连接组合件固定耦联器和安装的第一挠性连接组合件可动耦联器彼此耦联和电连通,安装的第一挠性连接组合件200A被安置在第一密封件杯腔中,其中安装的第一挠性连接组合件可动耦联器临时耦联到第一触点组合件引线柱本体第一端157并且与其电连通。方法进一步包含移除1002安装的第一挠性连接组合件200A',提供1004“替换第一挠性连接组合件200A'”。如本文所使用的,“替换第一挠性连接组合件200A”是替换安装的第一挠性连接组合件200A'的第一挠性连接组合件200。替换第一挠性连接组合件200A"具有第二组特性。替换第一挠性连接组合件200A"包含固定耦联器和可动耦联器,其中替换第一挠性连接组合件固定耦联器和替换第一挠性连接组合件可动耦联器彼此耦联和电连通。
方法进一步包含将替换第一挠性连接组合件200A"定位1006在第一密封件杯腔中,将替换第一挠性连接组合件200A"临时耦联1008到真空电路中断器。在此构型中,替换第一挠性连接组合件200A"与第一触点组合件引线柱本体第一端167电连通。
进一步地,将替换第一挠性连接组合件临时耦联1008到真空电路中断器10包含将替换第一挠性连接组合件可动耦联器临时耦联1010到第一触点组合件引线柱本体第一端167,以及将替换第一挠性连接组合件固定耦联器临时耦联1012到线路端子20或负载端子22中的一个。
如上所述并且如图8中所示出的,真空中断器组合件30还可以包含两个可动触点组合件150A、150B。在此构型中,第二触点组合件150B通过第二波纹管组合件100B耦联到第二密封件杯46。进一步地,在此实施例中,第二密封件杯46以类似于第一密封件杯44的方式进行配置,即使用侧壁62和凸缘64。进一步地,在此实施例中,第二挠性连接组合件200B被安置在第二密封件杯46内并且耦联到线路端子20和第二触点组合件150B两者并且与其电连通。将不详细讨论第二触点组合件150B的具体细节,但应注意的是,第二触点组合件150B以及相关联的元件,如但不限于第二密封件杯46和第二挠性连接组合件200B,基本上类似于上文所讨论的第一可动触点组合件150A。进一步地,在附图中,第二触点组合件150B的元件共享相似的附图标记,但由字母“B”标识。
虽然已经详细描述了本发明的具体实施例,但是本领域技术人员将理解的是,可以根据本公开的总体教导来对那些细节进行各种修改和替换。因此,所公开的特定布置仅是说明性的,并且不限制将给出所附权利要求的全部范围及其任何和所有等效物的本发明的范围。
- 直流电弧故障电路中断器、直流电弧故障检测器、用于直流电弧故障电路中断器的噪音消除电路、检测电弧故障的方法
- 带无线单元的电路中断器、包括电路中断器的通信系统和关联方法