MIPI发送器及其时钟校准方法
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及数据通信技术领域,具体地,涉及MIPI发送器及其时钟校准方法。
背景技术
在移动设备的不同模块之间需要用于通信互连的高速接口。为了实现高速接口的标准化成立了MIPI(Mobile Industry Processor Interface)联盟。基于MIPI协议,可以将移动设备内部的接口如摄像头、显示屏接口、射频/基带的接口电路等标准化,从而减少移动设备设计的复杂程度和增加设计灵活性。MIPI的逻辑层则是分别面向摄像头、显示屏、移动通信、存储等不同用途的专用协议,物理层包括D-PHY、M-PHY、C-PHY。D-PHY是MIPI协议的一部分,描述了同步、高速、低功耗的物理层。D-PHY例如包括对DSI(串行显示接口)和CSI(串行摄像头接口)在物理层上的定义。
根据MIPI D-PHY协议,MIPI电路中的发送器包括多个数据通道(Data Lane)和一个时钟通道(Clock Lane)。多个数据通道彼此独立,共享一个时钟通道。多个数据通道从时钟通道接收的时钟信号以及输出到数字部分的时钟信号存在着时钟偏移(skew)。时钟偏移是时钟信号的不同路径所导致的不同延时,不仅可能导致数字部分的采样错误,而且导致不同数据通道的数据偏差,从而产生严重的数据错误。
发明内容
鉴于上述问题,本发明的目的在于提供MIPI发送器及其时钟校准方法,其中,利用校准模块修正数据通道相对于时钟通道的时钟偏移,以及修正多个数据通道之间的时钟偏移,从而保证数据采样的准确性。
根据本发明实施例提供一种MIPI发送器的时钟校准方法,所述MIPI发送器包括时钟通道和数据通道,所述时钟校准方法包括:
对所述时钟通道产生的第一采样时钟信号和所述数据通道产生的第二采样时钟信号进行相位比较,以获得初始相位关系;以及
根据所述初始相位关系,对所述第二采样时钟信号进行移相,以使所述第一采样时钟信号和所述第二采样时钟信号的相位差小于基准值。
优选地,所述进行相位比较包括:采用所述第二采样时钟信号,对所述第一采样时钟信号进行采样;以及根据采样值,确定所述第二采样时钟信号和所述第二采样时钟信号的初始相位关系。
优选地,所述进行相位比较包括:采用所述第一采样时钟信号,对所述第二采样时钟信号进行采样;以及根据采样值,确定所述第二采样时钟信号和所述第二采样时钟信号的初始相位关系。
优选地,所述初始相位关系包括所述第二采样时钟信号超前于所述第一采样时钟信号,或者,所述第二采样时钟信号滞后于所述第一采样时钟信号。
优选地,所述对所述第二采样时钟信号进行移相包括:根据所述初始相位关系,对所述第二采样时钟信号进行至少一次移相。
优选地,所述第二采样时钟信号的移相包括相位后移所述基准值。
优选地,所述第二采样时钟信号的移相次数与所述初始相位关系相对应。
优选地,所述第二采样时钟信号的移相由使能信号的触发边沿触发。
优选地,所述第二采样时钟信号的移相包括:在所述触发边沿后的最近邻时钟周期中,将高电平阶段或低电平阶段延长所述基准值,从而将单个时钟周期延长所述基准值;以及在所述最近邻时钟周期之后的时钟周期中,恢复所述时钟周期的数值。
优选地,根据所述相位关系的翻转确定所述第一采样时钟信号和所述第二采样时钟信号的相位差小于基准值。
优选地,在所述初始相位关系为所述第二采样时钟信号超前于所述第一采样时钟信号的情形下,如果所述相位关系翻转奇数次,则确定所述第一采样时钟信号和所述第二采样时钟信号的相位差小于基准值。
优选地,在所述初始相位关系为所述第二采样时钟信号滞后于所述第一采样时钟信号的情形下,如果所述相位关系翻转偶数次,则确定所述第一采样时钟信号和所述第二采样时钟信号的相位差小于基准值。
优选地,在时钟对准之后,所述第二采样时钟信号的时钟周期的开始位置,对齐所述第一采样时钟信号的时钟周期的开始位置。
优选地,所述的时钟校准方法还包括:对所述第二采样时钟信号进行附加的移相,在时钟对准之后,所述第二采样时钟信号的时钟周期的开始位置,对齐所述第一采样时钟信号的时钟周期的中间位置。
优选地,所述MIPI发送器还包括附加的数据通道,所述附加的数据通道产生第三采样时钟信号,所述时钟校准方法还包括:对所述第三采样时钟信号进行移相,以使所述第一采样时钟信号和所述第三采样时钟信号的相位差小于基准值。
优选地,所述第一采样时钟信号和所述第二采样时钟信号是基于输入时钟信号分频产生的时钟信号。
优选地,所述基准值小于所述输入时钟信号的时钟周期。
根据本发明实施例提供的一种MIPI发送器,包括:
数字部分,用于基于第一采样时钟信号产生串行数据信号,以及基于第二采样时钟信号将输入数字信号转换成串行数据;以及
模拟部分,所述模拟部分包括时钟通道和数据通道,所述时钟通道将所述输入串行数据信号转换成差分输出时钟信号,所述数据通道将串行数据转换成差分输出数据信号,
其中,所述时钟通道和所述数据通道分别产生所述第一采样时钟信号和所述第二采样时钟信号,
所述数字部分包括:校准模块,所述校准模块根据所述第一采样时钟信号和所述第二采样时钟信号的相位关系产生使能信号;
所述数据通道包括:移相模块,所述移相模块根据所述使能信号的触发边沿,对所述第二采样时钟信号进行移相,以使所述第一采样时钟信号和所述第二采样时钟信号的相位差小于基准值。
优选地,所述校准模块采用所述第二采样时钟信号,对所述第一采样时钟信号进行采样;以及根据采样值,确定所述第一采样时钟信号和所述第二采样时钟信号的初始相位关系。
优选地,所述校准模块采用所述第二采样时钟信号,对所述第一采样时钟信号进行采样;以及根据采样值,确定所述第一采样时钟信号和所述第二采样时钟信号的在移相后的相位关系是否翻转。
优选地,所述移相模块对所述第二采样时钟信号进行至少一次移相。
优选地,所述第二采样时钟信号的移相包括相位后移所述基准值。
优选地,所述第二采样时钟信号的移相次数与所述初始相位关系相对应。
优选地,所述第二采样时钟信号的移相包括:
在所述触发边沿后的最近邻时钟周期中,将高电平阶段或低电平阶段延长所述基准值,从而将单个时钟周期延长所述基准值;以及
在所述最近邻时钟周期之后的时钟周期中,恢复所述时钟周期的数值。
优选地,根据所述移相后的相位关系的翻转确定所述第一采样时钟信号和所述第二采样时钟信号的相位差小于基准值。
优选地,在所述初始相位关系为所述第二采样时钟信号超前于所述第一采样时钟信号的情形下,如果所述移相后的相位关系翻转奇数次,则确定所述第一采样时钟信号和所述第二采样时钟信号的相位差小于基准值。
优选地,在所述初始相位关系为所述第二采样时钟信号滞后于所述第一采样时钟信号的情形下,如果所述移相后的相位关系翻转偶数次,则确定所述第一采样时钟信号和所述第二采样时钟信号的相位差小于基准值。
根据本发明实施例的MIPI发送器,在MIPI发送器的数字部分中对时钟信号CLKb进行校准。为此,数字部分还包括校准模块。校准模块接收时钟信号CLKa和CLKb,对时钟信号CLKa和CLKb的相位进行比较,以及根据比较结果产生使能信号EN用于控制移相模块的动作。如果时钟信号CLKa和CLKb的相位差不符合基准值,则使能信号EN提供触发边沿,移相模块对时钟信号CLKb进行移相,以改变时钟信号CLKa和CLKb的相位关系。在时钟信号CLKb的移相次数与时钟信号CLKa和时钟信号CLKb的初始相位差相对应的情形下,时钟信号CLKa和CLKb的相位差最终可以符合基准值。该MIPI发送器利用校准模块修正数据通道相对于时钟通道的时钟偏移,从而保证数据采样的准确性。
在优选的实施例中,MIPI发送器可以包括多个数据通道,且多个数据通道共用一个时钟通道,其中,多个数据通道分别将各自的时钟信号CLKb与共用的时钟通道提供的时钟信号CLKa进行对齐。因而,MIPI发送器可以修正多个数据通道之间的时钟偏移,从而保证数据采样的准确性。
附图说明
通过以下参照附图对本发明实施例的描述,本发明的上述以及其他目的、特征和优点将更为清楚。
图1示出根据本发明实施例的MIPI发送器的示意性框图。
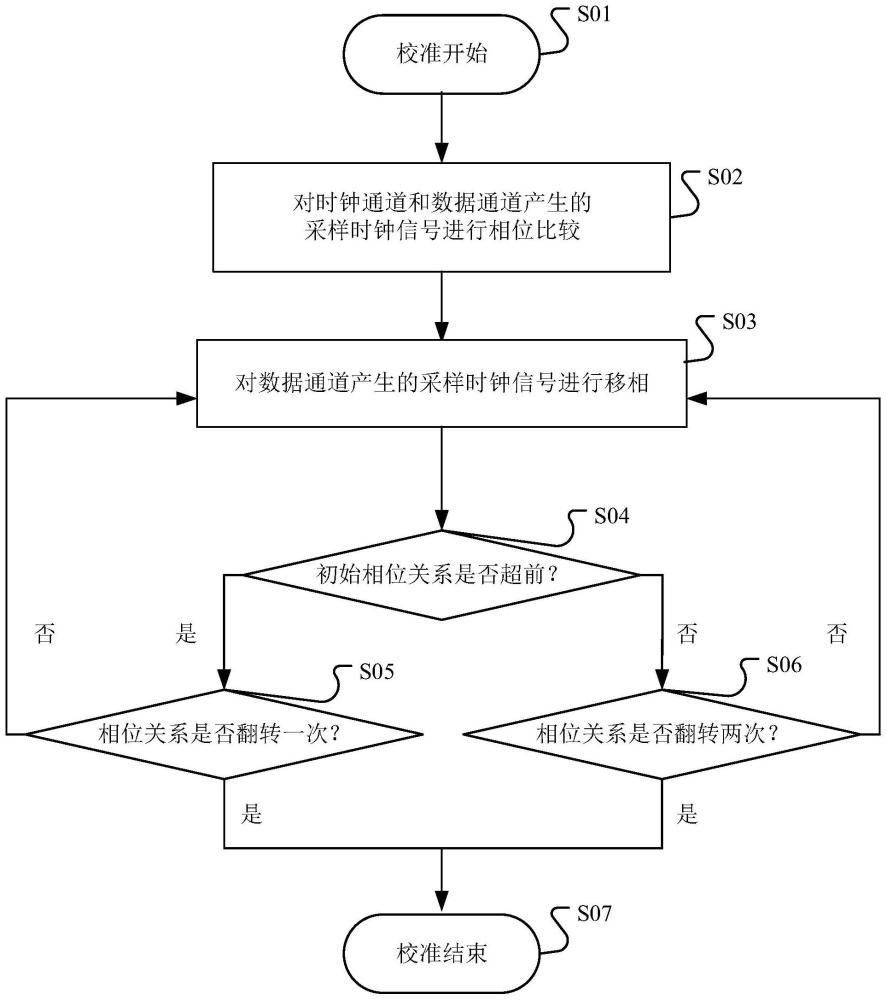
图2示出根据本发明实施例的MIPI发送器的时钟校准方法的流程图。
图3示出根据本发明实施例的MIPI发送器的时钟校准方法的时序图。
图4示出MIPI发送器在时钟校准方法中单次触发的仿真波形图。
图5a和图5b分别示出MIPI发送器在时钟校准前后的仿真波形图。
具体实施方式
以下将参照附图更详细地描述本发明。在各个附图中,相同的元件采用类似的附图标记来表示。为了清楚起见,附图中的各个部分没有按比例绘制。此外,可能未示出某些公知的部分。
以下基于实施例对本发明进行描述,但是本发明并不仅仅限于这些实施例。在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。为了避免混淆本发明的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
除非上下文明确要求,否则整个说明书和权利要求书中的“包括”、“包含”等类似词语应当解释为包含的含义而不是排他或穷举的含义;也就是说,是“包括但不限于”的含义。在本发明的描述中,需要理解的是,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
图1示出根据本发明实施例的MIPI发送器的示意性框图。在本实施例中,MIPI发送器100例如是高速发送器(high speed transmitter,缩写为HSTX),包括数字部分110和模拟部分120。
MIPI发送器100的数字部分110接收输入数字信号Di、以及时钟信号CLKa和CLKb,以及提供串行数据信号DATAck和串行数据DATAs。MIPI发送器100的模拟部分120,基于时钟信号CLKa对串行数据信号DATAck进行串并转换,以产生差分输出时钟信号CLKp和CLKm,基于时钟信号CLKb对串行数据DATAs进行串并转换,以产生差分输出数据信号DATAp和DATAm。
进一步地,MIPI发送器100的模拟部分120包括时钟通道121和数据通道122。为了清楚起见,以下仅以一个时钟通道和一个数据通道为例进行示例说明。
时钟通道121包括并串转换模块1211、串并转换模块1212、移相模块1213和分频器1214。时钟通道121接收差分输入时钟信号CLK1和CLK2,经过并串转换模块1211发送至串并转换模块1212,用于产生差分输出时钟信号CLKp和CLKm。进一步地,时钟信号CLK1经过移相模块1213进行移相,以及经过分频器1214分频之后获得时钟信号CLKa。MIPI发送器100的模拟部分120将时钟信号CLKa提供至MIPI发送器100的数字部分110。
数据通道122包括并串转换模块1221、串并转换模块1222、移相模块1223和分频器1224。数据通道122接收差分输入时钟信号CLK3和CLK4,经过并串转换模块1221发送至串并转换模块1222,用于产生差分输出数据信号DATAp和DATAm。进一步地,时钟信号CLK3经过移相模块1223进行移相,以及经过分频器1224分频之后获得时钟信号CLKb。MIPI发送器100的模拟部分120将时钟信号CLKb提供至MIPI发送器100的数字部分110。
MIPI发送器100的数字部分110包括控制器111和状态机112、时钟模块113和采样模块114。
数字部分110接收的时钟信号CLKa不仅用于控制控制器111,而且用于控制状态机112。控制器111接收输入数字信号Di,以及在时钟信号CLKa的控制下将数据发送至采样模块114。时钟模块113将时钟信号CLKa转换成串行数据信号DATAck。采样模块114在时钟信号CLKb的控制下接收控制器111发送的数据,从而对数据进行采样以产生串行数据DATAs。
上述MIPI发送器100的模拟部分120接收的时钟信号CLK1和CLK2是彼此反相的时钟信号,时钟信号CLK3和CLK4是彼此反相的时钟信号,并且,时钟信号CLK1与时钟信号CLK3的相位差为90度。模拟部分120产生的时钟信号CLKa是基于时钟信号CLK1进行移相和分频产生的时钟信号,模拟部分120的时钟信号CLKb是基于时钟信号CLK3进行移相和分频产生的时钟信号。
MIPI发送器100的模拟部分120接收的时钟信号CLK1至CLK4是外部锁相环电路产生的时钟信号,因此,时钟信号CLK1至CLK4彼此具有准确的相位差。然而,经过模拟部分120的时钟树综合(Clock Tree Synthesis,缩写为CTS)之后,由于时钟信号CLKa和CLKb产生的路径不同,MIPI发送器100的数字部分110从模拟部分120接收的时钟信号CLKa和CLKb的延时不同,因此,时钟信号CLKa和CLKb之间存在着时钟偏移(skew)。
在现有技术的MIPI发送器中,对时钟信号CLKa和CLKb的时钟偏移并未进行校对。然而,时钟偏移不仅可能导致数字部分110的采样错误,而且导致不同数据通道的数据偏差,从而产生严重的数据错误。
根据本发明实施例的MIPI发送器100与现有技术的MIPI发送器不同之处在于,在MIPI发送器100的数字部分110中对数据通道122数模接口的采样时钟CLKb相对于时钟通道121的时钟信号CLKa之间的相位进行校准。为此,数字部分110还包括校准模块115。校准模块115接收时钟信号CLKa和CLKb,对时钟信号CLKa和CLKb的相位进行比较,以及根据比较结果产生使能信号EN用于控制移相模块1223的动作。如果时钟信号CLKa和CLKb的相位差不符合基准值,则使能信号EN提供触发边沿,移相模块1223对时钟信号CLKb进行移相,以改变时钟信号CLKa和CLKb的相位关系。在时钟信号CLKb的移相次数与时钟信号CLKa和时钟信号CLKb的初始相位差相对应的情形下,时钟信号CLKa和CLKb的相位差最终可以符合基准值。
根据本发明实施例的MIPI发送器100,描述了模拟部分120包括一个时钟通道121和一个数据通道122。在替代的实施例中,如上文所述,MIPI发送器100可以包括多个数据通道,且多个数据通道共用一个时钟通道,其中,多个数据通道分别对应一个校准模块,将各自的时钟信号CLKb对准到共用的时钟通道提供的时钟信号CLKa的中间。因而,MIPI发送器100可以修正多个数据通道之间的时钟偏移,从而保证数据通道的采样时钟信号CLKb处于最佳采样窗口,并且补偿不同数据通道时钟信号CLKb之间的相对偏移。
图2示出根据本发明实施例的MIPI发送器的时钟校准方法的流程图。在该实施例中,MIPI发送器100中的移相模块1223和校准模块115一起执行时钟校准方法的多个步骤。例如,在MIPI电路的初始化阶段,MIPI发送器100执行以下详述的步骤S01至S07。
在步骤S02,对时钟信号CLKa和CLKb进行相位比较。
在该步骤中,校准模块115利用数据通道122提供的时钟信号CLKb,对时钟通道121提供的时钟信号CLKa进行采样,根据采样值对时钟信号CLKa和CLKb的相位进行比较。
在本实施例中,时钟信号CLKa和CLKb的时钟周期彼此相同,并且与时钟信号CLK1和CLK3的时钟周期成预定的比例关系。
时钟信号CLKa是对输入时钟信号CLK1进行分频所述产生的信号,时钟信号CLKb是对输入时钟信号CLK3进行分频所产生的信号。时钟信号CLKa和CLKb分别用于串行数据信号DATAck和串行数据DATAs的串并转换。如果串行数据信号DATAck和串行数据DATAs是8比特数据,则时钟通道121中的串并转换模块1212将8比特数据的串行数据信号转换成1比特的差分输出时钟信号,数据通道122中的串并转换模块1222将8比特数据的串行数据转换成1比特的差分输出数据信号。因此,时钟通道121中的分频器1214和数据通道122中的分频器1224的分频比为4,以支持将8比特数据转换成2比特差分信号的串并转换。
参见图3,时钟信号CLK1和CLK3分别是时钟通道121和数据通道122的输入时钟信号,时钟信号CLKa和CLKb分别是时钟通道121和数据通道122产生的采样时钟信号。时钟信号CLK1和CLK3的时钟周期均为T1,彼此的时钟周期相同且相位差90度。时钟信号CLKa和CLKb的时钟周期均为T2,彼此的时钟周期相同且存在相位偏移。由于时钟通道121和数据通道122的分频比为4,因此,时钟信号CLKa和CLKb的时钟周期T2是时钟信号CLK1和CLK3的时钟周期T1的4倍,即,T2=4*T1。
在本实施例中,利用数据通道122提供的时钟信号CLKb,在时钟信号CLKb的边沿对时钟通道121提供的时钟信号CLKa进行采样,根据采样值获得时钟信号CLKa和CLKb的初始相位关系。在替代实施例中,基于相同的原理,可以利用时钟通道121提供的时钟信号CLKa,在时钟信号CLKa的边沿对数据通道122提供的时钟信号CLKb进行采样,根据采样值获得时钟信号CLKa和CLKb的初始相位关系。
在本实施例中,在时钟信号CLKb的上升沿对时钟信号CLKa进行采样。如果时钟信号CLKa的采样值为0,则表示时钟信号CLKb超前于时钟信号CLKa。如果时钟信号CLKa的采样值为1,则表示时钟信号CLKb滞后于时钟信号CLKa。在替代的实施例中,在时钟信号CLKb的下降沿对时钟信号CLKa进行采样。如果采样值为1,则表示时钟信号CLKb超前于时钟信号CLKa。如果采样值为0,则表示时钟信号CLKb滞后于时钟信号CLKa。
由于在一个时钟信号的边沿对另一个时钟信号进行采样,时钟信号CLKa和时钟信号CLKb的边沿难以严格对齐,因此,可以根据该步骤的采样结果来判定,在未进行校准的情况下的初始相位关系,即时钟信号CLKb超前或滞后于时钟信号CLKa。
在步骤S03中,对时钟信号CLKb进行移相,以改变时钟信号CLKa和CLKb的相位关系。
在该步骤中,时钟校准模块115产生使能信号EN。移相模块1223响应使能信号EN的触发边沿对时钟信号CLKb进行移相,例如,在触发边沿后的一个时钟周期延长高电平阶段,或者延长低电平阶段,以使时钟信号CLK3的相位后移。对于每个触发边沿,时钟信号CLK3后移的相位等于T1/2,相应地,时钟信号CLKb后移的相位等于T1/2。
在步骤S04中,判断时钟信号CLKa和CLKb的初始相位关系的类型。
在本实施例中,由于移相模块1223将时钟信号CLKb的相位后移的特性,因此,对于不同初始相位关系,时钟信号CLKb校准所需的相移量是不同的。
如果时钟信号CLKb超前于时钟信号CLKa,则时钟信号CLKb校准所需的相移量小于时钟信号CLKb的时钟周期T2,相应地,相位关系翻转一次或其他奇数次(后续以相位关系翻转一次为例),因此,进一步执行步骤S05。如果时钟信号CLKb滞后于时钟信号CLKa,时钟信号CLKb校准所需的相移量大于T2且小于2*T2,相应地,相位关系翻转两次或其他偶数次(后续以相位关系翻转两次为例),因此,进一步执行步骤S06。
在步骤S05中,判断时钟信号CLKa和CLKb的相位关系是否翻转一次。
如果时钟信号CLKa和CLKb的相位关系并未翻转,则确定时钟信号CLKa和CLKb的相位差不符合基准值,返回执行步骤S03至S05,重复对时钟信号CLKb进行一次或多次移相,直至时钟信号CLKa和CLKb的相位关系翻转一次。
如果时钟信号CLKa和CLKb的相位关系翻转一次,则确定时钟信号CLKa和CLKb的相位差符合基准值,继续执行步骤S07,从而结束时钟校准方法。
参见图3,时钟信号CLKb_10、CLKb_11和CLKb_12分别表示初始时钟信号、第一次移相后的时钟信号和第五次移相后的时钟信号。
作为初始时钟信号,时钟信号CLKb_10超前于时钟信号CLKa,超前量小于T1/2。在时钟信号CLKb_10的上升沿检测到采样值为0。由于使能信号EN的每个脉冲导致时钟信号CLKb后移的相移量Δφ=T1/2=T2/8。因此,只需要移相一次,获得第一次移相后的时钟信号CLKb_11。在时钟信号CLKb_11的上升沿检测到采样值为1。因而,根据采样值的数值翻转,就可以检测到时钟信号CLKa和CLKb的相位关系翻转一次。此时,时钟信号CLKb_11与时钟信号CLKa之间的相位差小于T1/2,二者的上升沿大致对齐。
优选地,进一步对时钟信号CLKb_11进行四次移相,总计的相移量Δφ=2*T1=T2/2,获得第五次移相后的时钟信号CLKb_12。此时,时钟信号CLKb_12与时钟信号CLKa之间的相位差小于T2/2,时钟信号CLKb_12的上升沿大致对齐时钟信号CLKa的下降沿。
在步骤S06中,判断时钟信号CLKa和CLKb的相位关系是否翻转两次。
如果时钟信号CLKa和CLKb的相位关系并未翻转,则确定时钟信号CLKa和CLKb的相位差不符合基准值,返回执行步骤S03至S05,重复对时钟信号CLKb进行一次或多次移相,直至时钟信号CLKa和CLKb的相位关系翻转两次。
如果时钟信号CLKa和CLKb的相位关系翻转两次,则确定时钟信号CLKa和CLKb的相位差符合基准值,继续执行步骤S07,从而结束时钟校准方法。
参见图3,时钟信号CLKb_20、CLKb_21、CLKb_22和CLKb_23分别表示初始时钟信号、第三次移相后的时钟信号、第七次移相后的时钟信号、以及第十一次移相后的时钟信号。
作为初始时钟信号,时钟信号CLKb_20滞后于时钟信号CLKa,滞后量大于T1/2且小于T1。在时钟信号CLKb_20的上升沿检测到采样值为1。由于使能信号EN的每个脉冲导致时钟信号CLKb后移的相移量Δφ=T1/2=T2/8。因此,在移相三次之后,获得第三次移相后的时钟信号CLKb_21。在时钟信号CLKb_21的上升沿检测到采样值为0。因而,根据采样值的数值翻转,就可以检测到时钟信号CLKa和CLKb的相位关系第一次翻转。在移相七次之后,获得第七次移相后的时钟信号CLKb_22。在时钟信号CLKb_21的上升沿检测到采样值为1。因而,根据采样值的数值翻转,就可以检测到时钟信号CLKa和CLKb的相位关系第二次翻转。此时,时钟信号CLKb_22与时钟信号CLKa之间的相位差小于T1/2,二者的上升沿大致对齐。
优选地,进一步对时钟信号CLKb_22进行四次移相,总计的相移量Δφ=2*T1=T2/2,获得第十一次移相后的时钟信号CLKb_23。此时,时钟信号CLKb_23与时钟信号CLKa之间的相位差小于T2/2,时钟信号CLKb_23的上升沿大致对齐时钟信号CLKa的下降沿。
根据本发明实施例的时钟校准方法,描述模拟部分120包括一个时钟通道121和一个数据通道122。在替代的实施例中,如上文所述,MIPI发送器100可以包括多个数据通道,且多个数据通道共用一个时钟通道,其中,多个数据通道分别执行上述的时钟校准方法,以使多个数据通道的采样时钟信号与共用的时钟通道的采样时钟信号分别进行对齐。因而,该时钟校准方法可以修正多个数据通道之间的时钟偏移,从而保证数据采样的准确性。
图4示出MIPI发送器在时钟校准方法中单次触发的仿真波形图。在图中,CLKa表示时钟通道提供的时钟信号,CLKb1和CLKb2分别表示两个数据通道提供的时钟信号,EN1和EN2分别表示两个数据通道中的时钟校准模块提供的使能信号。
如图4所示,时钟信号CLKb1和CLKb2超前于时钟信号CLKa。两个数据通道中的移相模块在触发边沿后的最近邻时钟周期T3改变时钟信号CLKb1和CLKb2的占空比,例如,将最近邻时钟周期T3的高电平阶段延长ΔT=T1/2=T2/8。然后,在触发边沿后的次近邻时间周期T2恢复时钟信号CLKb1和CLKb2的占空比。因而,使能信号EN1和EN2的每个触发边沿可以获得时钟信号CLKb1和CLKb2后移的相移量Δφ=T1/2=T2/8。
在上述的实施例中,描述了移相模块对于每个触发边沿后移的相移量等于T1/2。然而,移相模块的相移量取决于电路特性。通过修改移相模块的电路设计,可以获得更高精度的相移量,从而提高时钟校准精度。在替代的实施例中,移相模块对于每个触发边沿后移的相移量可以等于T1、T1/2、T1/4、T1/8、T1/16等任意数值。
图5a和图5b分别示出MIPI发送器在时钟校准前后的仿真波形图。在图中,CLKa表示时钟通道提供的时钟信号,CLKb1和CLKb2分别表示两个数据通道提供的时钟信号。
如图5a所示,时钟信号CLKb1和CLKb2超前于时钟信号CLKa。由于未进行时钟校准,时钟信号CLKb1和CLKb2二者之间的相位差ΔT有可能大于T1,导致两个数据通道的串行数据经过串并转换后输出到差分线上的差分输出信号之间存在较大的时钟偏移。
如图5b所示,时钟信号CLKb1和CLKb2经过时钟校准,分别对齐时钟信号CLKa的1/2时钟周期的位置,时钟信号CLKb1与时钟信号CLKa之间的相位差2*T1<ΔTa<(2+1/2)*T1,时钟信号CLKb2与时钟信号CLKa之间的相位差2*T1<ΔTb<(2+1/2)*T1。在进行时钟校准之间,时钟信号CLKb1和时钟信号CLKb2彼此之间的相位差ΔT 依照本发明的实施例如上文所述,这些实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施例。显然,根据以上描述,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地利用本发明以及在本发明基础上的修改使用。本发明仅受权利要求书及其全部范围和等效物的限制。
- 时钟检测电路、时钟检测方法、时钟校准装置及时钟校准方法
- MIPI信号发送器及其信号发送方法