一种基于人工智能的自动对位装置及方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及对位技术领域,尤其涉及一种基于人工智能的自动对位装置及方法。
背景技术
现有技术中,对位的上层模块组件和下层模块组件为固定件,上层模块组件不能调整位置,只能实现上下层模块组件的简单的腔体闭合处理,不能实现在上层模块组件上增加对腔体内转动部件的特定位置的连接或控制功能。因此,本申请旨在提供一种能够克服上述缺陷的基于人工智能的自动对位装置及方法。
发明内容
本发明的目的在于克服现有技术的缺点,提供一种基于人工智能的自动对位装置及方法。
本发明的目的通过以下技术方案来实现:一种基于人工智能的自动对位装置,包括:与上层模块组件耦合的第一传感器,用于获取上层模块组件中第一预设点的第一实时位置数据;与下层模块组件耦合的第二传感器,用于获取下层模块组件中第二预设点的第二实时位置数据;处理器,用于基于所述第一实时位置数据和所述第二实时位置数据获取所述第一预设点和所述第二预设点的相对角度,并能够生成用于调整上层模块组件和/或下层模块组件状态的控制命令。
优选的,还包括:与所述上层模块组件耦合的第一驱动组件,用于调整上层模块组件的状态;与所述下层模块组件耦合的第二驱动组件,用于调整下层模块组件的状态;所述第一驱动组件和/或所述第二驱动组件能够基于所述控制命令工作以使得所述相对角度调整为小于设定阈值的状态。
优选的,所述下层模块组件包括离心模块组件和第一滑轨组件,所述离心模块组件包括离心安装电机安装板、离心电机和转盘组件,所述离心电机设置于所述离心电机安装板上,所述转盘组件连接至所述离心电机,其中,所述离心电机能够基于所述控制命令带动所述转盘组件转动,以改变下层模块组件的状态。
优选的,所述上层模块组件包括热盖组件和第二滑轨组件,所述热盖组件包括套筒和嵌套设置于所述套筒中的发热盘,所述发热盘上设置有热盖导向柱,其中,在所述热盖组件朝向离心模块组件运动的情况下,所述热盖导向柱能够抵靠接触至所述转盘组件。
优选的,所述转盘组件包括转盘和设置于所述转盘上的耐高温磁铁,所述转盘可拆卸连接设置有塑料芯片组件,所述塑料芯片组件上设置有能够被所述耐高温磁铁吸附的铁片。
优选的,所述塑料芯片组件包括塑料芯片和设置于所述塑料芯片上的若干个定位孔,所述转盘上设置有若干个定位柱,所述定位柱能够嵌套设置于所述定位孔中,其中,在所述热盖组件朝向离心模块组件运动的情况下,所述热盖导向柱能够嵌套设置于所述定位孔中。
优选的,所述热盖组件还包括加热膜、电木盖和保温棉筒,所述电木盖嵌套设置于所述套筒中,所述加热膜按照位于所述电木盖和所述发热盘之间的方式设置于所述套筒中,所述套筒能够嵌套设置于所述保温棉筒中。
优选的,所述热盖组件上设置有第一通道组件和第二通道组件,所述第一通道组件和所述第二通道组件均包括气嘴座和气嘴吸盘,所述气嘴座设置于所述保温棉筒上,所述气嘴吸盘设置于所述发热盘上。
一种基于人工智能的自动对位方法,包括如下步骤:配置与上层模块组件耦合的第一传感器,用于获取上层模块组件中第一预设点的第一实时位置数据;配置与下层模块组件耦合的第二传感器,用于获取下层模块组件中第二预设点的第二实时位置数据;配置处理器,用于基于所述第一实时位置数据和所述第二实时位置数据获取所述第一预设点和所述第二预设点的相对角度,并生成用于调整上层模块组件和/或下层模块组件状态的控制命令。
优选的,还包括如下步骤:配置与所述上层模块组件耦合的第一驱动组件,用于调整上层模块组件的状态;配置与所述下层模块组件耦合的第二驱动组件,用于调整下层模块组件的状态;所述第一驱动组件和/或所述第二驱动组件基于所述控制命令工作以使得所述相对角度调整为小于设定阈值的状态。
本发明具有以下优点:
(1)对位的上层模块组件为活动件,使用滑环作为该活动件与外部的连接件,在上下层模块组件使用受体闭合处理的同时,上层模块组件可跟随转动部件同步进行转动;使用角度传感器或编码器实现上层模块组件的定位,使用光耦与电机控制实现下层模块组件的定位,从而实现上下层模块组件的精确对位,只要在出厂前完成校准工作,在客户的使用过程中无需再次校准,装置即可自动完成对位操作;可在上层模块组件上增加电气控制部件,即可对腔体内的芯片的特定位置进行控制(本设计为对芯片的气阀进行控制),同时不会产生绕线问题。
(2)可在上层模块组件上增加电气控制部件,即可对腔体内的芯片的特定位置进行控制(本设计为对芯片的气阀进行控制),且该控制过程中,上层模块组件可随意转动。上层木模块组件随意转动时,不会出现绕线问题。
(3)转盘的结构设计能使得机加工工艺简单并更好的保证其加工精度,与转动轴装配后更好的保证转盘表面的水平(一次装夹就可以在车床上完成转盘圆孔与转盘表面的加工,保证了零件的精度),最终使得出厂后无需校准操作。
(4)本申请中,在塑料芯片上表面中心处开设有第二沉孔以及台阶(芯片内部底层圆孔比耐高温磁铁直径稍大,比金属片直径小),然后将金属片预埋放在第二沉孔内(金属片与第二沉孔无需有公差配合关系,金属片不会因为芯片升温或冷冻保存时,使金属片掉落或者芯片因装配产生变形),金属片的厚度小于或等于第二沉孔的深度,在远离芯片的中心外设计两个以上的定位孔(定位孔越接近反应检测孔的位置越好,这样能使检测孔的位置偏移量减小),其中定位孔的位置不在同一圆周、同一角度上。同时转盘的中心安装有耐高温磁铁,当芯片放置在转盘上时,磁吸通过吸附金属片使得金属片产生压力把芯片压紧。转盘远离中心的位置对应设计与芯片配合的多个定位柱。该方式能够有效的防止芯片放反,如不是正面放置,芯片会被定位柱顶起无法使芯片底部与转盘贴合,具有防呆的作用;远离中心的定位孔相对于中心位置设置定位孔的偏移量更小,有效提高了位置精度,保证荧光检测的性能;磁铁吸附压紧方式结构设计简单,成本较低,芯片更换方便,节约时间。
附图说明
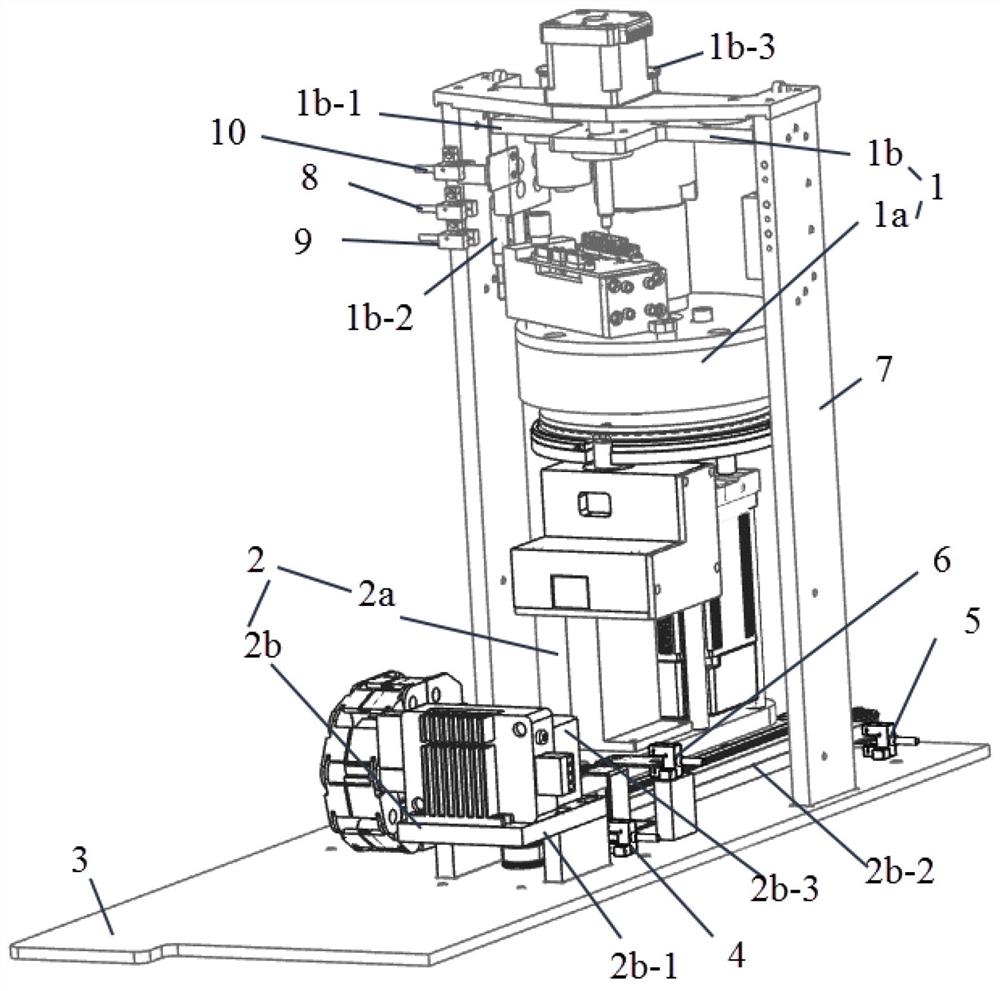
图1为本发明的基于人工智能的自动对位装置的结构示意图;
图2为另一视角下自动对位装置的结构示意图;
图3为离心模块组件的结构示意图;
图4为塑料芯片组件的结构示意图;
图5为转盘组件的结构示意图;
图6为另一视角下转盘组件的结构示意图;
图7为热盖组件的结构示意图;
图8为处理器与各电子模块之间的模块化连接示意图。
图中,1-上层模块组件、2-下层模块组件、3-安装基板、1a-热盖组件、1b-第二滑轨组件、2a-离心模块组件、2b-第一滑轨组件、2b-1-滑动支撑板、2b-2-第一导轨、2b-3-进出仓电机、4-出仓光电传感器、5-进仓光电传感器、6-进出仓光电感应片、1b-1-安装板、1b-2-第二导轨、1b-3-升降丝杆电机、7-固定支架、8-上光电传感器、9-下光电传感器、10-升降光电感应片、2a-1离心电机安装板、2a-2-离心电机、2a-3-转盘组件、2a-4-塑料芯片组件、11-第一侧、12-第二侧、13-转盘、14-磁铁安装座、15-耐高温磁铁、16-第一沉孔、17-安装槽、18-连接套筒、19-键槽、20-第一开槽、18a-第一段、18b-第二段、21-第二开槽、18b-1-第一端部、18b-2-第二端部、22-转盘复位光电感应片、23-转盘复位光电传感器、24-定位柱、25-定位孔、26-塑料芯片、27-铁片、28-密封膜、29-第二沉孔、30-第一通道组件、31-第二通道组件、31a-气嘴座、31b-气嘴吸盘、32-套筒、33-发热盘、34-加热膜、35-电木盖、36-保温棉筒、37-第一腔体、38-第二腔体、39-螺栓孔、40-螺栓、41-热盖导向柱、42-第一传感器、43-第二传感器、44-处理器、45-第一驱动组件、46-第二驱动组件、47-转轴。
具体实施方式
下面结合附图对本发明做进一步的描述,本发明的保护范围不局限于以下所述:
如图1至图8所示,本申请提供一种基于人工智能的自动对位装置,包括上层模块组件1、下层模块组件2和安装基板3。上层模块组件1和下层模块组件2均设置有安装基板3上。下层模块组件2用于放置微流控芯片,并带动微流控芯片进行转动,使得微流控芯片能够进行离心处理。上层模块组件1用于对微流控芯片进行加热。
优选的,下层模块组件2包括离心模块组件2a和第一滑轨组件2b。第一滑轨组件2b设置于安装基板3上,离心模块组件2a能够耦合至第一滑轨组件2b,使得离心模块组件2a能够沿第一滑轨组件2b移动。上层模块组件1包括热盖组件1a和第二滑轨组件1b。安装基板3上设置有支撑架5,第二滑轨组件1b设置于支撑架5上,热盖组件1a耦合至第二滑轨组件1b,使得热盖组件1a能够沿第二滑轨组件1b的延伸方向移动。例如,离心模块组件2a能够沿水平方向移动,热盖组件能够沿竖直方向移动,离心模块组件2a移动后能够位于热盖组件的正下方。在使用时,离心模块组件2a沿水平方向移动后,能够从热盖组件1a的正下方移开,从而便于在离心模块组件2a上放置微流控芯片。微流控芯片放置完成后,离心模块组件2a移动至热盖组件1a的正下方后,热盖组件1a下移即可与微流控芯片抵靠接触,从而实现微流控芯片的加热。
优选的,第一滑轨组件2b包括滑动支撑板2b-1、第一导轨2b-2和进出仓电机2b-3。离心模块组件2a设置于滑动支撑板2b-1上,第一导轨2b-2设置于安装基板3上。第一导轨2b-2能够呈直线状。滑动支撑板2b-1能够连接至第一导轨2b-2以能够沿第一导轨2b-2的延伸方向移动。例如,第一导轨2b-2的横截面能够呈T型,滑动支撑板2b-1上设置有截面形状呈T型的卡槽,导轨能够嵌套设置于卡槽中,从而即可实现滑动支撑板2b-1与第一导轨2b-2的滑动连接。进出仓电机2b-2设置于安装基板3上,并且与滑动支撑板2b-1耦合,从而通过进出仓电机2b-2的工作即可带动滑动支撑板2b-1沿导轨的延伸方向滑动。例如,进出仓电机2b-2的转动轴上连接设置有驱动齿轮,滑动支撑板2b-1上设置有齿条,齿条能够啮合至驱动齿轮,在驱动齿轮顺时针转动时,通过齿条的啮合能够带动滑动支撑板2b-1沿第一方向移动,在驱动齿轮逆时针转动时,通过齿条的啮合能够带动滑动支撑板2b-1沿第二方向移动。第一方向与第二方向彼此相反。第一方向可以是朝向进出仓电机2b-2的方向。第二方向可以是远离进出仓电机2b-2的方向。
优选的,安装基板3上设置有出仓光电传感器4和进仓光电传感器5。滑动支撑板2b-1上设置有进出仓光电感应片6。出仓光电传感器4和进仓光电传感器5的连线能够与第一导轨2b-2平行。在下层模块组件2位于上层模块组件1的正下方时,进出仓光电感应片6能够与进仓光电传感器5对齐,此时,进仓光电传感器5将通过例如是亮起指示灯以直观显示下层模块组件2所处的位置。当下层模块组件2位于上层模块组件1的正下方时,进出仓光电感应片能够与出仓光电传感器对齐,此时出仓光电传感器将通过例如是亮起指示灯以直观显示下层模块组件2所处的位置。
优选的,第二滑轨组件1b包括安装板1b-1、第二导轨1b-2和升降丝杆电机1b-3。安装基板3上设置有固定支架7。升降丝杆电机1b-3设置于固定支架7上。第二导轨1b-2设置于固定支架7上。安装板1b-1耦合至第二导轨1b-2,使得安装板1b-1能够沿第二导轨1b-2的延伸方向移动。安装板1b-1与第二导轨1b-2的耦合方向与滑动支撑板和第一导轨的耦合方式相同,在此不再赘述。升降丝杆电机1b-3能够连接至安装板1b-1,进而在升降丝杆电机1b-3工作的情况下,能够带动安装板1b-1上下移动。固定支架7上设置有上光电传感器8和下光电传感器9。安装板1b上设置有升降光电感应片10。在初始状态下,上层模块组件1和下层模块组件2处于分离状态,此时,升降光电感应片10与上光电传感器8对齐,使得上光电传感器8能够通过例如是亮起指示灯的方式直观显示上层模块组件1所处的位置。在上层模块组件1向下移动以与下层模块组件2抵靠接触时,升降光电感应片10能够与下光电传感器9对齐,使得下光电传感器9能够通过例如是亮起指示灯的方式直观显示上层模块组件1所处的位置。
优选的,离心模块组件2a包括离心电机安装板2a-1、离心电机2a-2、连接固定组件3和塑料芯片组件2a-4。离心电机安装板2a-1能够呈平板状,其上可以设置有螺丝孔,进而通过螺丝即可将离心电机2a-2安装固定在离心电机安装板2a-1的第一侧11。转盘组件2能够连接至离心电机2a-2,进而在离心电机2a-2通电工作时,转盘组件2能够转动。塑料芯片组件2a-4能够连接至转盘组件2a-3,进而能够与转盘组件2a-3同步转动。转盘组件2a-3和塑料芯片组件2a-4均位于离心电机安装板2a-1的第二侧12。第一侧11和第二侧12彼此相对,例如,如图3所示,第一侧11可以是离心电机安装板2a-1的下侧,第二侧12可以是离心电机安装板2a-1的上侧。
优选的,转盘组件2a-3包括转盘13、磁铁安装座14和耐高温磁铁15。转盘13上设置有第一沉孔16。磁铁安装座14能够嵌套设置于第一沉孔16中,并可以通过例如是螺栓等连接件进行连接固定。磁铁安装座14上设置有安装槽17,耐高温磁铁15可以放置在安装槽17中,并通过例如是螺栓等连接件进行连接固定。转盘13上设置有连接套筒18,连接套筒18能够呈中空圆柱状,使得离心电机2a-2的转动轴能够插入连接套筒18中。连接套筒18的内壁上设置有键槽19,键槽19能够沿连接套筒18的轴向延伸。离心电机2a-2的转动轴上可以设置有卡块,在转动轴插入连接套筒18中时,卡块能够嵌套于键槽19中,键槽与卡块的配合能够确保转盘在高速转动时,转盘与转动轴之间不会打滑。连接套筒18上还设置有第一开槽20以将连接套筒18分隔为第一段18a和第二段18b。第一段18a与转盘13连接,第二段18b上设置有第二开槽21。第二开槽21能够完全将第二段18b割断,使得第二段18b具有第一端部18b-1和第二端部18b-2。第一端部18b-1和第二端部18b-2上可以设置有螺栓孔,螺栓孔中可以设置有螺栓,进而通过拧紧螺栓即可增加第二段18b与转动轴之间的夹持力度。连接套筒上设置第一开槽和键槽,用于保证与动力轴的同心度,第一开槽下方用于夹紧,键槽的配合能保证高速旋转时不会打滑。此结构在一个零件上既具备保证安装精度的要求,也具备夹紧功能;安装上更方便,可通过一颗螺钉即可完成锁紧,单手很轻松就可以完成操作。此外,结合使用精度要求,转盘的结构设计能使得机加工工艺简单并更好的保证其加工精度,与转动轴装配后更好的保证转盘表面的水平(一次装夹就可以在车床上完成转盘圆孔与转盘表面的加工,保证了零件的精度)。
优选的,第二段18b上可以通过螺栓等连接件连接固定有转盘复位光电感应片22。离心电机安装板2a-1上设置有转盘复位光电传感器23。转盘复位光电传感器23具有截面形状为C字型的安装座,安装座的上端部可以设置有激光发生器,安装座的下端部可以设置有接收器,当转盘复位光电感应片22位于安装座的上端部和下端部之间时,其能够将激光发生器产生的激光进行阻挡,此时接收器将无法接收到激光,进而便能够确定转盘处于复位状态。
优选的,转盘13上设置有若干个定位柱24。塑料芯片组件2a-4上设置有对应的定位孔25,使得定位柱24能够嵌套设置于定位孔25中。塑料芯片组件的放置有防呆作用,结构上的设计能保证转盘与转动轴的垂直度,同心度,水平等,使得高速离心运动时塑料芯片组件不会出现跳动或飞出。
优选的,塑料芯片组件2a-4包括塑料芯片26、铁片27和密封膜28。塑料芯片26和转盘13均能够呈圆盘状,塑料芯片26和转盘13的直径相同。塑料芯片26上设置有第二沉孔29。铁片4c能够呈圆盘状,使得铁片4c能够放置于第二沉孔29中。密封膜28能够贴附在铁片27和塑料芯片26上,进而能够对第二沉孔29起到封堵的作用,使得塑料芯片26在被正反拿取时,第二沉孔29中的铁片4c均不会掉落。塑料芯片组件2a-4和转盘组件2a-3之间能够通过耐高温磁铁15和铁片27的相互吸附作用而比例连接压紧。具体的,如图3所示,在使用时,转盘13按照其第一沉孔16朝上的方式放置,塑料芯片26按照其第二沉孔29向上的方式放置。转动塑料芯片26使得定位孔25与定位柱24对齐后,向下移动塑料芯片26以使得塑料芯片26朝向转盘13移动,直至定位柱24完全插入定位孔25中,由于定位柱24和定位孔25的限位,塑料芯片26与转盘13之间将不会产生相对转动。最后,将铁片27放入第二沉孔29中,耐高温磁铁15和铁片27将产生相互吸附作用,从而通过铁片27便能够对塑料芯片26施加压紧力,进而能够实现塑料芯片26与转盘13的连接固定。现有技术中,在塑料芯片中心设有多边形孔,然后再其中的一条边开设一缺口用于芯片的原点定位;转盘的上方设计有对应芯片的多边形和缺口凸台,转盘凸台与芯片中心多边形孔通过间隙配合平放于转盘上,芯片底部与转盘上表面贴合。因芯片还需经过转盘旋转离心,在此装置外还需增加一个芯片压紧装置。这种芯片的定位和固定方式必须保证芯片的加样口朝上,不能对芯片放置的正反面有防呆的作用,容易造成误放导致实验失败。其次,芯片中心多边形孔与转盘中心凸台配合是有间隙的,即使中心的间隙很小,远离中心的检测口位置对应底部检测孔的偏移量也很大,位置精度不准会影响荧光检测的结果。同时,因离心额外增加压紧装置使得结构复杂,操作复杂,成本增加。本申请中,在塑料芯片上表面中心处开设有第二沉孔以及台阶(芯片内部底层圆孔比耐高温磁铁直径稍大,比金属片直径小),然后将金属片预埋放在第二沉孔内(金属片与第二沉孔无需有公差配合关系,金属片不会因为芯片升温或冷冻保存时,使金属片掉落或者芯片因装配产生变形),金属片的厚度小于或等于第二沉孔的深度,在远离芯片的中心外设计两个以上的定位孔(定位孔越接近反应检测孔的位置越好,这样能使检测孔的位置偏移量减小),其中定位孔的位置不在同一圆周、同一角度上。同时转盘的中心安装有耐高温磁铁,当芯片放置在转盘上时,磁吸通过吸附金属片使得金属片产生压力把芯片压紧。转盘远离中心的位置对应设计与芯片配合的多个定位柱。该方式能够有效的防止芯片放反,如不是正面放置,芯片会被定位柱顶起无法使芯片底部与转盘贴合,具有防呆的作用;远离中心的定位孔相对于中心位置设置定位孔的偏移量更小,有效提高了位置精度,保证荧光检测的性能;磁铁吸附压紧方式结构设计简单,成本较低,芯片更换方便,节约时间。
优选的,热盖组件1a的外轮廊形状能够由圆形限定,热盖组件1a上设置有关于热盖组件1a的圆心彼此对称的第一气流通道组件30和第二气流通道组件31,其中,第一气流通道组件30和第二气流通道组件31均包括气嘴座31a和气嘴吸盘31b。第一气流通道3和第二气流通道4均可以与气泵进行连接,在使用时,气泵能够进行抽气,使得气嘴吸盘31b能够产生负压效果,气嘴吸盘31b与微流控芯片抵靠接触后,气嘴吸盘31b能够对其进行吸附,进而确保微流控芯片能够与热盖组件1a紧密贴合,从而达到更佳的加热效果。
优选的,热盖组件1a包括套筒32、发热盘33、加热膜34和电木盖35,套筒32呈中空圆柱状,发热盘33嵌套设置于套筒32中以将套筒32的内腔分隔为第一腔体37和第二腔体38,其中,加热膜34和电木盖35均嵌套设置于第一腔体37中。具体的,第一腔体37的侧壁上设置有若干个螺栓孔39,在螺栓孔39中嵌套设置有螺栓40的情况下,电木盖35能够连接至螺栓40。即可以通过螺栓将电木盖35固定在套筒32上。加热膜34设置于电木盖35和发热盘33之间。加热膜34通电后即可产生热量,热量能够传递至发热盘33,使得发热盘33的温度能够升高,进而在微流控芯片与发热盘抵靠接触时,即可对微流控芯片进行加热。电木盖35由隔热材料制成以避免加热膜产生的热量朝向电木盖一侧传递。
优选的,热盖组件1a还包括呈圆柱状的保温棉筒36,套筒32能够嵌套设置于保温棉筒36中。保温棉筒36可以由保温棉筒制成,套筒32整体放置于保温棉筒36后,能够提高套筒32的保温效果,避免其热量流失过快。气嘴座31a设置于保温棉筒36上,气嘴吸盘31b设置于发热盘33上。气嘴座31a能够转动,在气嘴座31a与气嘴吸盘31b抵靠接触后,通过转动气嘴座31a即可实现气嘴座31a与气嘴吸盘31b的螺纹连接。
优选的,发热盘33上设置有至少一个热盖导向柱41。微流控芯片上可以设置有定位孔,在使用时,热盖导向柱41能够插入定位孔中,进而能够提高发热盘与微流控芯片的对位效果。
优选的,第一传感器和第二传感器均可以是角度传感器。第一驱动组件45可以是驱动电机,其设置于固定支架7上,其转轴47能够与电木盖35进行连接。第二传感器可以与转轴耦合,进而可以获取热盖组件转动的角度。第二驱动组件可以是离心电机2a-2,第一传感器能够耦合至离心电机的转轴,进而可以获取离心模块组件2a的转动角度。
本申请还提供一种基于人工智能的自动对位方法,包括如下步骤:配置与上层模块组件耦合的第一传感器,用于获取上层模块组件中第一预设点的第一实时位置数据;配置与下层模块组件耦合的第二传感器,用于获取下层模块组件中第二预设点的第二实时位置数据;配置处理器,用于基于所述第一实时位置数据和所述第二实时位置数据获取所述第一预设点和所述第二预设点的相对角度,并生成用于调整上层模块组件和/或下层模块组件状态的控制命令。
优选的,基于人工智能的自动对位方法还包括如下步骤:配置与所述上层模块组件耦合的第一驱动组件,用于调整上层模块组件的状态;配置与所述下层模块组件耦合的第二驱动组件,用于调整下层模块组件的状态;所述第一驱动组件和/或所述第二驱动组件基于所述控制命令工作以使得所述相对角度调整为小于设定阈值的状态。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。