一种激光导航叉车的自动导航系统及方法
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及智能叉车技术领域,具体涉及一种激光导航叉车的自动导航系统及方法。
背景技术
叉车是工业搬运车辆,是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆,传统的叉车都是由操作员驾驶进行工作的,其使用范围以及使用时间都受到很多条件的限制。
现在把自动导航技术和传统的叉车结合起来,进行无人驾驶,通过设定的程序进行控制,可以大大提高了应用范围,也降低了应用成本。AGV叉车包含托盘叉车式AGV,宽脚堆高式叉车AGV,无脚堆高式叉车AGV。用于堆栈托盘类货物的物流周转,由液压升降系统、差速驱动系统、PLC控制系统、导引系统、通信系统、警示系统、操作系统和动力电源组成,是集液压升降和PLC控制的可编程无线调度的自动导引小车。
激光叉车即AGV叉车的一种,是利用激光进行导航的AGV叉车,激光叉车在取货时,利用取货机构的货叉将物品抬起。
现在很多自动导航叉车都是通过地面铺设磁条或者二维码进行导航的,这样使用起来不稳定,因为铺在地面上的磁条和二维码容易损坏,或者污染,这样就会给导航带去很多不稳定的因素,严重的影响了导航的效果。
发明内容
本发明的目的在于提供一种激光导航叉车的自动导航系统及方法,通过导航牵动叉车沿控制模块的预设移动路径移动,在叉车移动的过程中通过转向模块、转向预警模块以及触碰距离检测模块对叉车位置进行调整,控制叉车沿预设移动路径移动以解决现有技术中自动导航叉车的导航磁条容易损坏而影响叉车导航移动的技术问题。
为解决上述技术问题,本发明具体提供下述技术方案:
一种激光导航叉车的自动导航系统,包括用于检测叉车实时位置信息的导航模块,以及用于模拟仓库货架通道的地图输入模块,所述导航模块和所述地图输入模块电性连接有控制模块,所述控制模块电性连接有驱动模块,所述控制模块根据所述地图输入模块提供的仓库货架通道以及所述导航模块提供的叉车位置信息计算出叉车的预设移动路径,再通过所述控制模块控制所述驱动模块沿所述控制模块计算的预设移动路径移动;
还包括与所述控制模块电性连接的转向模块、转向预警模块以及触碰距离检测模块,所述触碰距离检测模块用于探测叉车与货架之间的距离并反馈给所述控制模块,所述转向预警模块用于仓库货架通道的转角预警并反馈给所述控制模块,所述控制模块根据所述触碰距离检测模块提供的距离信息以及所述转向预警模块的转角信息控制所述转向模块带动叉车转向。
作为本发明的一种优选方案,所述驱动模块包括与所述控制模块电性连接的驱动电机,以及与所述驱动电机传动连接的驱动轮,所述转向模块包括连接所述驱动轮的支撑轴,所述支撑轴靠近所述驱动轮设置有与所述驱动轮相连接的固定轮盘,所述固定轮盘之间偏心设置有转向横杆,所述转向横杆的两端分别与所述固定轮盘铰接,所述支撑轴上转动安装有转向伸缩杆,所述转向伸缩杆的输出轴与所述转向横杆转动连接,所述转向伸缩杆与所述控制模块电性连接。
作为本发明的一种优选方案,所述转向伸缩杆为液压杆,所述支撑轴与所述转向横杆之间连接有转正到位提醒组件,所述转正到位提醒组件与所述控制模块电性连接用于停止所述转向伸缩杆的伸缩。
作为本发明的一种优选方案,所述转正到位提醒组件包括设置在所述支撑轴上的固定杆,以及与所述固定杆相连接的联动杆,所述联动杆远离所述固定杆的一端与所述转向横杆相连接,所述固定杆上由远离所述转向横杆的一端向靠近所述转向横杆的一端设置有导向滑槽,所述联动杆靠近所述固定杆的一端设置有嵌装在所述导向滑槽内的移动滑柱,所述固定杆远离所述转向横杆的一端设置有限位开关,所述限位开关与所述控制模块电性连接。
作为本发明的一种优选方案,所述转向预警模块包括沿仓库货架通道转角在靠近仓库货架通道的货架上设置的感应磁体,以及安装在叉车两侧与所述转向牵引磁条相对应的感应磁体,所述感应磁体与所述控制模块电性连接用于控制所述转向伸缩杆在仓库货架通道转角处的伸缩;
所述感应磁体包括设置于叉车一侧的左感应磁体以及设置于叉车另一侧的右感应磁体,所述左感应磁体和所述右感应磁体分别与所述控制模块电性连接;
所述转向牵引磁条为电磁铁,所述转向牵引磁条与所述控制模块电性连接。
作为本发明的一种优选方案,所述触碰距离检测模块包括围绕叉车车身设置的左侧红外传感器组和右侧红外传感器组,所述左侧红外传感器组和所述右侧红外传感器组沿叉车车身中心线对称设置,所述左侧红外传感器组和所述右侧红外传感器组分别与所述控制模块电性连接用于控制所述转向伸缩杆在仓库货架通道内直行时的伸缩。
作为本发明的一种优选方案,所述导航模块包括安装在叉车车身上的导航雷达。
一种激光导航叉车的自动导航方法,包括如下步骤:
S100、通过所述地图输入模块向所述控制模块输入仓库货架通道图并标注目标货架的位置信息,所述导航模块向所述控制模块输入叉车的位置信息;
S200、所述控制模块根据仓库货架通道图以及叉车和目标货架的位置信息计算出叉车的预设移动路径,并向所述驱动模块发送驱动信号;
S300、所述导航模块向所述控制模块实时反馈叉车的位置以及移动距离,所述控制模块根据所述导航模块提供的叉车位置以及移动距离信息并参照仓库货架通道图控制叉车的直行以及转向;
S400、叉车在沿仓库货架通道直行时,所述触碰距离检测模块实时探测叉车与货架之间的距离并反馈给所述控制模块,当探测距离值小于设定阈值时,反馈给所述控制模块通过所述控制模块控制所述转向模块带动叉车反向转动以避免碰撞;
S500、所述控制模块根据步骤S200中的预设移动路径,通过所述控制模块控制沿预设移动路径设置的所述转向预警模块的所述转向牵引磁条得电,在叉车沿仓库货架通道转弯时,当所述控制模块接收到所述转向预警模块的所述感应磁体提供的转角信息后,所述控制模块控制所述转向模块带动叉车转向以通过仓库货架通道的转角。
作为本发明的一种优选方案,在步骤S400中所述控制模块根据所述触碰距离检测模块控制所述转向模块带动叉车反向的方法包括:
S401、当所述触碰距离检测模块的所述左侧红外传感器组向所述控制模块发送电信号时,所述控制模块控制所述转向模块带动叉车向远离所述左侧红外传感器的一侧转动;
S402、当所述触碰距离检测模块的所述右侧红外传感器组向所述控制模块发送电信号时,所述控制模块控制所述转向模块带动叉车向远离所述右侧红外传感器的一侧转动。
作为本发明的一种优选方案,在步骤S500中所述控制模块根据所述转向预警模块控制所述转向模块带动叉车转向的方法包括:
S501、叉车沿仓库货架通道转弯时,当设置在叉车上的所述左感应磁体接收到所述转向牵引磁条的磁力信号时,所述左感应磁体向所述控制模块发送转向信号,所述控制模块控制所述转向模块带动叉车向所述左感应磁体所对应的一侧转动;
S502、叉车沿仓库货架通道转弯时,当设置在叉车上的所述右感应磁体接收到所述转向牵引磁条的磁力信号时,所述右感应磁体向所述控制模块发送转向信号,所述控制模块控制所述转向模块带动叉车向所述右感应磁体所对应的一侧转动;
S503、叉车沿仓库货架通道转弯时,当所述左感应磁体和所述右感应磁体均未接收到所述转向牵引磁条的磁力信号时,所述叉车沿仓库货架通道直行。
本发明与现有技术相比较具有如下有益效果:
(1)本发明通过导航模块牵动叉车沿控制模块的预设移动路径移动,在叉车移动的过程中通过转向模块、转向预警模块以及触碰距离检测模块对叉车位置进行调整,控制叉车沿预设移动路径移动,从而有效解决现有技术的自动导航叉车的导航磁条容易损坏而影响叉车导航移动的技术问题;
(2)本发明的叉车上设置有带动叉车转向的转向模块、转向预警模块以及触碰距离检测模块,通过转向模块、转向预警模块以及触碰距离检测模块对叉车位置进行调整并牵动叉车转向,并通过触碰距离检测模块以及时调整叉车转向,有效避免叉车在移动过程中与货架发生碰撞的问题。
附图说明
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
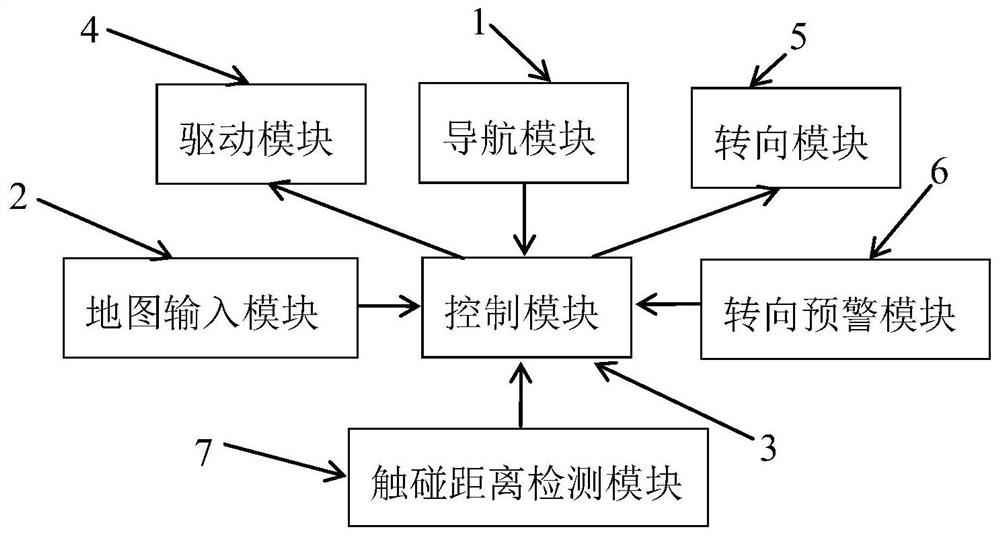
图1为本发明实施例提供自动导航系统的系统框图;
图2为本发明实施例的驱动模块主视结构示意图;
图3为本发明实施例的驱动模块俯视结构示意图;
图4为本发明实施例的转向预警模块结构示意图;
图5为本发明实施例的自动导航方法流程图。
图中的标号分别表示如下:
1-导航模块;2-地图输入模块;3-控制模块;4-驱动模块;5-转向模块; 6-转向预警模块;7-触碰距离检测模块;
41-驱动电机;42-驱动轮;43-支撑轴;44-固定轮盘;45-转向横杆;46- 转向伸缩杆;47-转正到位提醒组件;
471-固定杆;472-联动杆;473-导向滑槽;474-移动滑柱;475-限位开关;
61-转向牵引磁条;62-感应磁体;
71-左侧红外传感器组;72-右侧红外传感器组。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,本发明提供了一种激光导航叉车的自动导航系统,包括用于检测叉车实时位置信息的导航模块1,导航模块1包括,但不限制于,安装在叉车车身上的导航雷达,以及用于模拟仓库货架通道的地图输入模块2,地图输入模块2导入的仓库货架通道地图上标注目标货架的位置信息,导航模块1 和地图输入模块2电性连接有控制模块3,控制模块3包括,但不限制于,中央处理器以及人机交互系统,控制模块3电性连接有驱动模块4,通过控制模块3 将地图输入模块2的仓库地图输入至人机交互界面上,并标注出移动叉车以及目标货架的位置,然后控制模块3根据地图输入模块2提供的仓库货架通道以及导航模块1提供的叉车位置信息计算出叉车的预设移动路径,再通过控制模块3控制驱动模块4沿控制模块3计算的预设移动路径移动。
本发明通过导航模块1牵动叉车沿控制模块3的预设移动路径移动,在叉车移动的过程中通过转向模块5、转向预警模块6以及触碰距离检测模块7对叉车位置进行调整,控制叉车沿预设移动路径移动,从而有效解决现有技术的自动导航叉车的导航磁条容易损坏而影响叉车导航移动的技术问题。
此外,本发明还包括与控制模块3电性连接的转向模块5、转向预警模块6 以及触碰距离检测模块7,触碰距离检测模块7用于探测叉车与货架之间的距离并反馈给控制模块3,转向预警模块6用于仓库货架通道的转角预警并反馈给控制模块3,控制模块3根据触碰距离检测模块7提供的距离信息以及转向预警模块6的转角信息控制转向模块5带动叉车转向。
通过转向模块5、转向预警模块6以及触碰距离检测模块7对叉车位置进行调整并牵动叉车转向,并通过触碰距离检测模块7以及时调整叉车转向,有效避免叉车在移动过程中与货架发生碰撞的问题。
如图2和图3所示,其中本发明的驱动模块4包括,但不限制于,与控制模块3电性连接的驱动电机41,以及与驱动电机41传动连接的驱动轮42,转向模块5包括连接驱动轮42的支撑轴43,支撑轴43靠近驱动轮42设置有与驱动轮42 相连接的固定轮盘44,固定轮盘44之间偏心设置有转向横杆45,转向横杆45 的两端分别与固定轮盘44铰接,支撑轴43上转动安装有转向伸缩杆46,转向伸缩杆46的输出轴与转向横杆45转动连接,转向伸缩杆46与控制模块3电性连接,在驱动轮42处于正向状态时,转向伸缩杆46处于伸出状态,从而方便转向伸缩杆46输出轴的伸缩移动能够通过转向横杆45牵动驱动乱42不同方向转动。
其中,转向伸缩杆46为液压杆,支撑轴43与转向横杆45之间连接有转正到位提醒组件47,转正到位提醒组件47与控制模块3电性连接用于停止转向伸缩杆46的伸缩,在叉车沿货架通道直行的过程中,通过转正到位提醒组件47 为转向伸缩杆46的伸出提供提醒作用,从而保证叉车沿直线移动。
本发明的转正到位提醒组件47包括设置在支撑轴43上的固定杆471,以及与固定杆471相连接的联动杆472,联动杆472远离固定杆471的一端与转向横杆45相连接,固定杆471上由远离转向横杆45的一端向靠近转向横杆45的一端设置有导向滑槽473,联动杆472靠近固定杆471的一端设置有嵌装在导向滑槽 473内的移动滑柱474,固定杆471远离转向横杆45的一端设置有限位开关475,限位开关475与控制模块3电性连接。
在通过转向伸缩杆46的伸缩带动转向横杆45沿水平方向移动时,与转向横杆45相连接的联动杆472的一端跟随其移动,联动杆472嵌装在固定杆471导向滑槽473内的移动滑柱474沿导向滑槽473移动,当联动杆472在导向花擦473 内滑动并触碰设置在固定杆471上的限位开关475后,限位开关475向控制模块 3发送电信号,控制模块3接收到电信号后控制转向灯伸缩杆46停止通过,从而实现驱动轮42的转正定位。
如图4所示,本发明的转向预警模块6包括沿仓库货架通道转角在靠近仓库货架通道的货架上设置的感应磁体,以及安装在叉车两侧与转向牵引磁条 61相对应的感应磁体62,感应磁体62与控制模块3电性连接用于控制转向伸缩杆46在仓库货架通道转角处的伸缩。
其中,感应磁体62为与控制模块3电性连接的磁感应开关,感应磁体62包括设置于叉车一侧的左感应磁体以及设置于叉车另一侧的右感应磁体,左感应磁体和右感应磁体分别与控制模块3电性连接。
此外,本发明的转向牵引磁条61为电磁铁,转向牵引磁条61与控制模块3 电性连接。
在叉车沿仓库货架通道转弯时,当设置在叉车上的左感应磁体接收到转向牵引磁条的磁力信号时,左感应磁体向控制模块发送转向信号,控制模块控制转向模块带动叉车向左感应磁体所对应的一侧转动;当设置在叉车上的右感应磁体接收到转向牵引磁条的磁力信号时,右感应磁体向控制模块发送转向信号,控制模块控制转向模块带动叉车向右感应磁体所对应的一侧转动;当左感应磁体和右感应磁体均未接收到转向牵引磁条的磁力信号时,叉车沿仓库货架通道直行。
本发明的触碰距离检测模块7包括围绕叉车车身设置的左侧红外传感器组71和右侧红外传感器组72,左侧红外传感器组71和右侧红外传感器组72沿叉车车身中心线对称设置,左侧红外传感器组71和右侧红外传感器组72分别与控制模块3电性连接用于控制转向伸缩杆46在货架通道内直行时的伸缩。
当触碰距离检测模块7的左侧红外传感器组71向控制模块3发送电信号时,控制模块3控制转向模块5带动叉车向远离左侧红外传感器71的一侧转动;当触碰距离检测模块7的右侧红外传感器72组向控制模块3发送电信号时,控制模块3控制转向模块5带动叉车向远离右侧红外传感器72的一侧转动。
如图5所示,此外,本发明还提供了一种激光导航叉车的自动导航方法,包括如下步骤:
S100、通过所述地图输入模块向所述控制模块输入仓库货架通道图并标注目标货架的位置信息,所述导航模块向所述控制模块输入叉车的位置信息;
S200、所述控制模块根据仓库货架通道图以及叉车和目标货架的位置信息计算出叉车的预设移动路径,并向所述驱动模块发送驱动信号;
S300、所述导航模块向所述控制模块实时反馈叉车的位置以及移动距离,所述控制模块根据所述导航模块提供的叉车位置以及移动距离信息并参照仓库货架通道图控制叉车的直行以及转向;
S400、叉车在沿仓库货架通道直行时,所述触碰距离检测模块实时探测叉车与货架之间的距离并反馈给所述控制模块,当探测距离值小于设定阈值时,反馈给所述控制模块通过所述控制模块控制所述转向模块带动叉车反向转动以避免碰撞;
S401、当所述触碰距离检测模块的所述左侧红外传感器组向所述控制模块发送电信号时,所述控制模块控制所述转向模块带动叉车向远离所述左侧红外传感器的一侧转动;
S402、当所述触碰距离检测模块的所述右侧红外传感器组向所述控制模块发送电信号时,所述控制模块控制所述转向模块带动叉车向远离所述右侧红外传感器的一侧转动。
S500、所述控制模块根据步骤S200中的预设移动路径,通过所述控制模块控制沿预设移动路径设置的所述转向预警模块的所述转向牵引磁条得电,在叉车沿仓库货架通道转弯时,当所述控制模块接收到所述转向预警模块的所述感应磁体提供的转角信息后,所述控制模块控制所述转向模块带动叉车转向以通过仓库货架通道的转角。
S501、叉车沿仓库货架通道转弯时,当设置在叉车上的所述左感应磁体接收到所述转向牵引磁条的磁力信号时,所述左感应磁体向所述控制模块发送转向信号,所述控制模块控制所述转向模块带动叉车向所述左感应磁体所对应的一侧转动;
S502、叉车沿仓库货架通道转弯时,当设置在叉车上的所述右感应磁体接收到所述转向牵引磁条的磁力信号时,所述右感应磁体向所述控制模块发送转向信号,所述控制模块控制所述转向模块带动叉车向所述右感应磁体所对应的一侧转动;
S503、叉车沿仓库货架通道转弯时,当所述左感应磁体和所述右感应磁体均未接收到所述转向牵引磁条的磁力信号时,所述叉车沿仓库货架通道直行。
以上实施例仅为本申请的示例性实施例,不用于限制本申请,本申请的保护范围由权利要求书限定。本领域技术人员可以在本申请的实质和保护范围内,对本申请做出各种修改或等同替换,这种修改或等同替换也应视为落在本申请的保护范围内。
- 一种激光导航叉车的自动导航系统及方法
- 一种基于激光信标导航系统的智能AGV叉车及导航方法