一种立式炉前端存储单元
文献发布时间:2023-06-19 12:19:35
技术领域
本发明涉及半导体制程中硅片热处理工艺技术领域,特别涉及一种立式炉前端存储单元。
背景技术
在半导体制程中,立式炉是在硅片热处理中被广泛应用的设备之一,立式炉也称做立式扩散炉。立式炉前端存储单元(立式炉STK)主要用于在立式炉设备前部存储FOUP(晶圆盒),现有立式炉前端存储单元大多可以存储18个FOUP(晶圆盒),其内部配有三轴传盒机械手(Carrier Transfer Robot),但由于半导体Fab厂房及运输2.8m高度限制,机械手立柱为单Z轴丝杠传动或同步带传动。目前,该类设备大多为18FOUP储位的形式,其存储能力有限,制程效率低。而由于半导体制程行业的进一步发展,对产能逐步提高,特别是12寸晶圆工艺的逐步推广下,急需一种大储位的立式炉前端模。
发明内容
针对上述问题,本发明的目的在于提供一种立式炉前端存储单元,以解决现有立式炉前端存储单元的存储能力有限,制程效率低的问题。
为了实现上述目的,本发明采用以下技术方案:
一种立式炉前端存储单元,包括立式炉主体、三轴机械手、立式炉框架及载入载出平台,其中三轴机械手和立式炉框架设置于立式炉主体内,所述立式炉框架上沿高度方向设有多层晶圆盒存放工位;所述载入载出平台设置于所述立式炉主体的一侧,用于晶圆盒的载入载出;所述三轴机械手用于在所述晶圆盒存放工位和所述载入载出平台之间进行晶圆盒的传输。
所述三轴机械手包括依次连接的机械手Z轴、机械手X轴及机械手R轴,其中机械手Z轴包括机械手Z1轴和机械手Z2轴,所述机械手Z1轴和机械手Z2轴沿Z轴方向可相对移动,所述机械手Z2轴与所述机械手X轴连接。
所述机械手Z1轴包括Z1轴电机、Z1轴减速机、Z1轴齿轮、Z1轴齿条、Z1轴导轨、Z1轴和Z2轴转接法兰板及机械手背板,其中Z1轴导轨设置于机械手背板上,Z1轴和Z2轴转接法兰板与Z1轴导轨滑动连接,Z1轴齿条设置于Z1轴导轨上;
所述Z1轴减速机安装在Z1轴和Z2轴转接法兰板上,且输入轴与Z1轴电机连接,所述Z1轴减速机的输出轴与Z1轴齿轮连接,所述Z1轴齿轮与所述Z1轴齿条啮合。
所述机械手Z2轴包括Z2轴电机、Z2轴减速机、Z2轴齿轮、Z2轴齿条、Z2轴导轨及Z2轴和X轴转接法兰板,其中Z2轴导轨设置于Z1轴和Z2轴转接法兰板上,所述Z2轴和X轴转接法兰板与Z2轴导轨滑动连接,所述Z2轴齿条设置于Z2轴导轨上;
所述Z2轴减速机设置于所述Z2轴和X轴转接法兰板上,并且输入轴与Z2轴电机连接,所述Z2轴减速机的输出轴与Z2轴齿轮连接,所述Z2轴齿轮与Z2轴齿条啮合。
所述机械手X轴包括X轴驱动机构、X轴法兰板、X轴和R轴转接法兰、X轴框架及X轴导轨,其中X轴框架通过X轴法兰板与所述机械手Z2轴连接,所述X轴导轨设置于X轴框架上,所述X轴和R轴转接法兰与所述X轴导轨滑动连接;
所述X轴驱动机构设置于所述X轴框架内,并且与所述X轴和R轴转接法兰连接,所述X轴和R轴转接法兰通过所述X轴驱动机构的驱动在所述X轴导轨上移动。
所述X轴驱动机构包括X轴电机、X轴带轮、同步带及X轴带轮固定块,其中同步带通过两个X轴带轮支撑,所述X轴带轮通过X轴带轮固定块设置于所述X轴框架内,其中一所述X轴带轮设置于所述X轴电机的输出轴上;所述同步带与所述X轴和R轴转接法兰连接。
所述机械手R轴包括R轴电机、R轴谐波减速机、大臂壳体、大臂驱动机构、小臂壳体、小臂驱动机构及晶圆盒托盘;
所述R轴谐波减速机设置于所述机械手X轴上,并且输入轴与所述R轴电机的输出轴连接,所述R轴谐波减速机的输出轴法兰与大臂壳体固定连接,所述R轴谐波减速机驱动所述大臂壳体转动;
所述小臂壳体的一端与所述大臂壳体的末端转动连接,另一端可转动地设有晶圆盒托盘;
所述大臂驱动机构设置于所述大臂壳体内,并且与所述小臂壳体连接,所述大臂驱动机构用于驱动所述小臂壳体相对所述大臂壳体转动;
所述小臂驱动机构设置于所述小臂壳体内,并且与所述晶圆盒托盘连接;所述小臂驱动机构用于驱动所述晶圆盒托盘相对所述小臂壳体转动。
所述大臂驱动机构包括大臂主动轮、大臂同步带、肘轴及大臂从动轮,其中大臂主动轮与所述R轴谐波减速机的外圈固定连接,所述肘轴固定在所述大臂壳体的末端,所述大臂从动轮可转动地设置于所述肘轴上,并且通过大臂同步带与所述大臂主动轮连接;所述大臂从动轮与所述小臂壳体固定连接。
所述小臂驱动机构包括小臂主动轮、小臂从动轮及小臂同步带,其中小臂主动轮固定在所述肘轴上,所述小臂从动轮可转动地设置于所述小臂壳体的末端,并且通过小臂同步带与所述小臂主动轮连接,所述晶圆盒托盘与所述小臂从动轮固定连接。
所述小臂同步带通过设置于所述小臂壳体内的小臂张紧轮张紧。
本发明的优点及有益效果是:本发明是在现有立式炉前端存储单元的基础上,进一步增加立式炉的存储能力提高制程效率,晶圆盒存放工位由18个增至26个。由于立式炉的分层限高,导致分层之后上层的工位单Z轴无法取放,因此对机械手进行双Z轴设计,方案采用一体式齿条导轨,减薄双层Z轴的厚度到70mm,使其能够满足在晶圆盒左端极限位置294.5mm时,可以取放,并对X轴和R轴进行构型优化。
附图说明
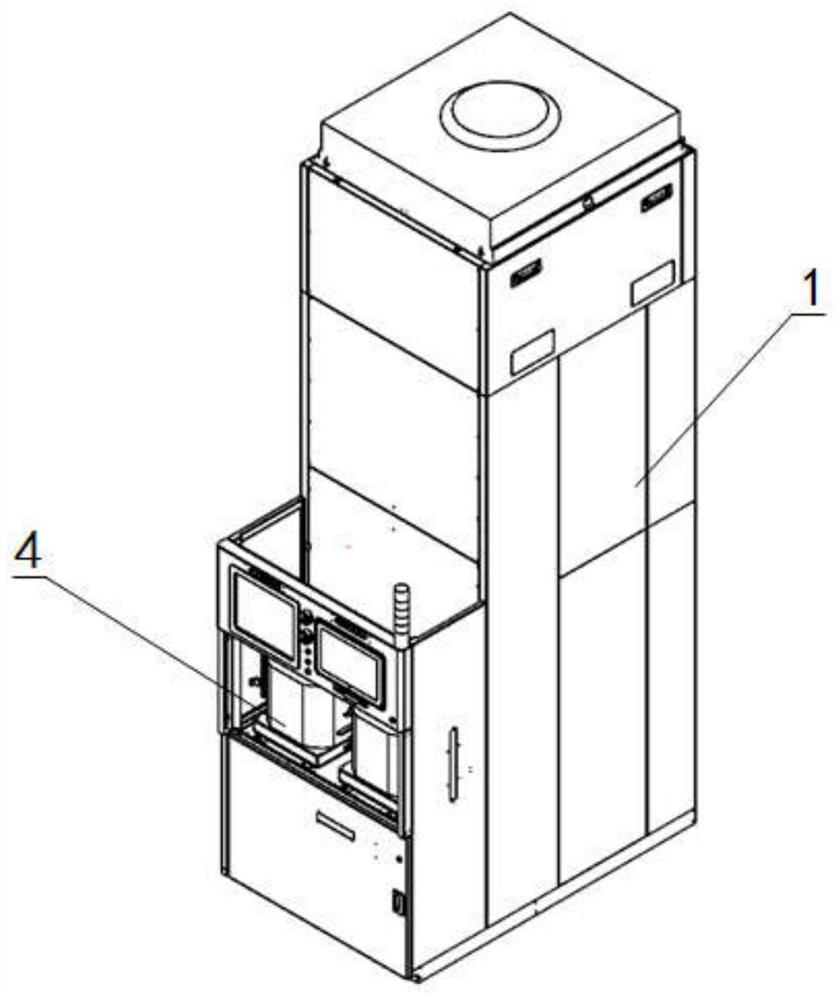
图1为本发明立式炉前端存储单元的轴测图;
图2为本发明立式炉前端存储单元的内部工位布置图;
图3为本发明的整体俯视图;
图4为本发明中三轴机械手的轴测图;
图5为本发明中三轴机械手的正视图;
图6为图5的右视图;
图7为本发明中三轴机械手的Z轴剖视图;
图8为本发明中三轴机械手的X轴等轴测图;
图9为本发明中三轴机械手的R轴剖视图;
图10为本发明中三轴机械手的R轴俯视图;
图11为本发明中三轴机械手取放左、右极限位置图。
图中:1、立式炉主体,2、三轴机械手,3、立式炉框架,4、载入载出平台,5、机械手Z1轴,6、机械手Z2轴,7、机械手X轴,8、机械手R轴,9、Z1轴电机,10、Z1轴减速机、11、Z1轴齿轮,12、Z1轴齿条,13、Z1轴导轨,14、Z1轴和Z2轴转接法兰板,15、Z2轴电机,16、Z2轴减速机,17、Z2轴齿轮,18、Z2轴齿条,19、Z2轴导轨,20、Z2轴和X轴转接法兰板,21、拖链,22、X轴电机,23、X轴法兰板,24、X轴和R轴转接法兰,25、X轴框架,26、X轴导轨,27、X轴带轮,28、X轴带轮固定块,29、X轴拖链,30、R轴电机,31、R轴谐波减速机,32、大臂壳体,33、大臂主动轮,34、大臂上盖,35、大臂同步带,36、肘轴,37、大臂从动轮,38、小臂壳体,39、小臂主动轮,40、小臂从动轮,41、晶圆盒托盘,42、小臂张紧轮,43、小臂同步带,44、晶圆盒,45、晶圆盒存放工位,46、FIMS(立式炉主体与前端模块对接开盒模块),50为机械手背板。
具体实施方式
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
如图1-3所示,本发明提供的一种立式炉前端存储单元,包括立式炉主体1、三轴机械手2、立式炉框架3及载入载出平台4,其中三轴机械手2和立式炉框架3设置于立式炉主体1内,立式炉框架3上沿高度方向设有多层晶圆盒存放工位45;载入载出平台4设置于立式炉主体1的一侧,用于晶圆盒的载入载出;三轴机械手2用于在晶圆盒存放工位45和载入载出平台4之间进行晶圆盒的传输。
如图4-6所示,三轴机械手2包括依次连接的机械手Z轴、机械手X轴7及机械手R轴8,其中机械手Z轴为双轴结构,包括机械手Z1轴5和机械手Z2轴6,机械手Z1轴5和机械手Z2轴6沿Z轴方向可相对移动,机械手Z2轴6与机械手X轴7连接。
如图7所示,机械手Z1轴5包括Z1轴电机9、Z1轴减速机10、Z1轴齿轮11、Z1轴齿条12、Z1轴导轨13、Z1轴和Z2轴转接法兰板14及机械手背板50,其中Z1轴导轨13设置于机械手背板50上,Z1轴和Z2轴转接法兰板14与Z1轴导轨13滑动连接,Z1轴齿条12设置于Z1轴导轨13上;Z1轴减速机10安装在Z1轴和Z2轴转接法兰板14上,且输入轴与Z1轴电机9连接,Z1轴减速机10的输出轴与Z1轴齿轮11连接,Z1轴齿轮11与Z1轴齿条12啮合。
Z1轴电机9通过Z1轴减速机10驱动Z1轴齿轮11转动,因Z1轴齿轮11与Z1轴齿条12啮合,所以Z1轴齿轮11沿Z1轴齿条12滚动,从而带动Z1轴和Z2轴转接法兰板14沿Z1轴导轨13上下移动。
本发明的实施例中,Z1轴齿条12和Z1轴导轨13为一体式结构。
如图7所示,机械手Z2轴6包括Z2轴电机15、Z2轴减速机16、Z2轴齿轮17、Z2轴齿条18、Z2轴导轨19及Z2轴和X轴转接法兰板20,其中Z2轴导轨19设置于Z1轴和Z2轴转接法兰板14上,Z2轴和X轴转接法兰板20与Z2轴导轨19滑动连接,Z2轴齿条18设置于Z2轴导轨19上;Z2轴减速机16设置于Z2轴和X轴转接法兰板20上,并且输入轴与Z2轴电机15连接,Z2轴减速机16的输出轴与Z2轴齿轮17连接,Z2轴齿轮17与Z2轴齿条18啮合。
Z2轴电机15通过Z2轴减速机16驱动Z2轴齿轮17转动,因Z2轴齿轮17与Z2轴齿条18啮合,所以Z2轴齿轮17沿Z2轴齿条18滚动,Z2轴齿轮17带动Z2轴和X轴转接法兰板20沿Z2轴导轨19上下移动,进而带动机械手X轴7和机械手R轴8上下移动。
本发明的实施例中,Z2轴齿条18和Z2轴导轨19为一体式结构。
如图8所示,机械手X轴7包括X轴驱动机构、X轴法兰板23、X轴和R轴转接法兰24、X轴框架25及X轴导轨26,其中X轴框架25通过X轴法兰板23与机械手Z2轴6连接,X轴导轨26设置于X轴框架25上,X轴和R轴转接法兰24与X轴导轨26滑动连接;
X轴驱动机构设置于X轴框架25内,并且与X轴和R轴转接法兰24连接,X轴和R轴转接法兰24通过X轴驱动机构的驱动在X轴导轨26上移动。
X轴驱动机构包括X轴电机22、X轴带轮27、同步带及X轴带轮固定块28,其中同步带通过两个X轴带轮27支撑,X轴带轮27通过X轴带轮固定块28设置于X轴框架25内,其中一X轴带轮27设置于X轴电机22的输出轴上;同步带与X轴和R轴转接法兰24连接。
X轴电机22驱动同步带转动,因同步带与X轴和R轴转接法兰24连接,所以带动X轴和R轴转接法兰24沿X轴导轨26移动,进而带动机械手R轴8沿X轴移动。
如图9-10所示,机械手R轴8包括R轴电机30、R轴谐波减速机31、大臂壳体32、大臂驱动机构、小臂壳体38、小臂驱动机构及晶圆盒托盘41;R轴谐波减速机31设置于机械手X轴7上,并且输入轴与R轴电机30的输出轴连接,R轴谐波减速机31的输出轴法兰与大臂壳体32固定连接,R轴谐波减速机31驱动大臂壳体32转动;小臂壳体38的一端与大臂壳体32的末端转动连接,另一端可转动地设有晶圆盒托盘41;大臂驱动机构设置于大臂壳体32内,并且与小臂壳体38连接,大臂驱动机构用于驱动小臂壳体38相对大臂壳体32转动;小臂驱动机构设置于小臂壳体38内,并且与晶圆盒托盘41连接;小臂驱动机构用于驱动晶圆盒托盘41相对小臂壳体38转动。
大臂驱动机构包括大臂主动轮33、大臂同步带35、肘轴36及大臂从动轮37,其中大臂主动轮33与R轴谐波减速机31的外圈固定连接,肘轴36固定在大臂壳体32的末端,大臂从动轮37可转动地设置于肘轴36上,并且通过大臂同步带35与大臂主动轮33连接;大臂从动轮37与小臂壳体38固定连接。
小臂驱动机构包括小臂主动轮39、小臂从动轮40及小臂同步带43,其中小臂主动轮39固定在肘轴36上,小臂从动轮40可转动地设置于小臂壳体38的末端,并且通过小臂同步带43与小臂主动轮39连接,晶圆盒托盘41与小臂从动轮40固定连接。小臂同步带43通过设置于小臂壳体38内的小臂张紧轮42张紧。
机械手R轴8的工作原理是:
R轴电机30与R轴谐波减速机31同轴,R轴谐波减速机31的外圈与大臂带轮33固连,减速机输出法兰通过肩轴与大臂上盖34固连,大臂上盖34与大臂壳体32固连,实现大臂与大臂主动轮33的相对运动;大臂主动轮33通过同步带35与大臂从动轮37连接,大臂从动轮37与小臂主动轮39安装在肘轴36上,并且大臂从动轮37可转动;大臂壳体32与肘轴36固连,肘轴36与小臂主动轮39固连,小臂壳体38与大臂从动轮37固连,实现小臂运动;小臂主动轮39通过小臂同步带43与小臂从动轮40相连,进而带动晶圆盒托盘41运动;由于结构中大小臂长度一致,从而实现R轴的往复直线运动。
本发明的实施例中,立式炉框架3上设有26个晶圆盒存放工位45,机械手背板50安装在立式炉框架3上,机械手Z1轴5的高度满足在2.8m以内,机械手Z轴的厚度为70mm,使其能够满足在晶圆盒左端极限位置294.5mm时,可以取放,即左端极限位置数值满足SEMIE15.1的设计标准。如图3所示,载入载出平台4通过电动滑台结构将立式炉外面的晶圆盒44运到立式炉内部,三轴机械手2再将晶圆盒44运输到各晶圆盒存放工位45处进行存放。
本发明的工作原理是:
如图11所示,操作人员或OHT(天车)将晶圆盒放到Load Port(载入载出平台)载出位,通过电动滑台将晶圆盒运输至立式炉内部即载入位,三轴机械手2运动到Load Port载入位,而后将晶圆盒送到立式炉内的工位存储,三轴机械手2复位,此为三轴机械手2的取放动作循环。当后端立式扩散炉需要氧化工作时,由三轴机械手2将工位上的晶圆盒取出,送到FIMS(立式炉主体与前端模块对接开盒模块)上进行开盒动作,由立式氧化炉一侧的机械手将晶圆盒中的晶圆片运送到Boat(舟)上,进行氧化工艺操作,此部分工艺非本专利涉及部分,仅简要说明过程。当氧化工艺结束,立式氧化炉一侧机械手将晶圆送回晶圆盒中,FIMS关盒,由三轴机械手2将晶圆盒取走存储,而后将晶圆盒运到Load Port载入位,LoadPort进行载入载出动作,有OHT(天车)将载出位的晶圆盒取走。
本发明增加立式炉的存储能力,提高制程效率。对机械手进行双Z轴设计,方案采用一体式齿条导轨,减薄双层Z轴的厚度到70mm,使其能够满足在晶圆盒左端极限位置294.5mm时,可以取放,并对X轴和R轴进行构型优化。
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
- 一种立式炉前端存储单元
- 一种立式氧化炉摆动炉门装置及立式氧化炉