重载AGV驱动轮结构
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及AGV小车领域,具体地说是一种重载AGV驱动轮结构。
背景技术
随着科技发展,AGV(Automated Guided Vehicle)小车已经得到广泛应用,但不同行业领域对于AGV要求不同,比如对于军用重型卡车及民用重型卡车生产领域来说,鉴于现今军用重型卡车及民用重型卡车产量的增加及生产工艺的改进提升,重卡自动化装配生产线要求也越来越高,所以针对重卡自身的特点及生产工艺要求,重卡合装AGV应运而生,而小尺寸大负载的驱动轮结构更加不可或缺,但现有重载AGV的驱动轮结构尺寸较大,其采用铰接轴配合盘轴承方式承载,驱动轮片宽度尺寸较宽,运行阻力较大,不仅难以满足重卡自动化装配生产线要求,也增加了AGV驱动功率和AGV电池容量。
发明内容
本发明的目的在于提供一种重载AGV驱动轮结构,外形尺寸较小、功率低且负载大,能够有效减小滚动摩擦力,提高AGV适应性。
本发明的目的是通过以下技术方案来实现的:
一种重载AGV驱动轮结构,包括左驱动轮装置、右驱动轮装置、取电装置、连接板和移动功率单元,其中连接板中部下侧设有取电装置,连接板两端下侧分别设有左轮架和右轮架,且左驱动轮装置安装于所述左轮架上,右驱动轮装置安装于所述右轮架上,连接板上设有盘轴承,取电装置底部设有取电板,且取电板和连接板之间设有移动功率单元。
所述左驱动轮装置包括左驱动轮片和左驱动单元,所述右驱动轮装置包括右驱动轮片和右驱动单元,且左驱动轮片设于左轮架内,右驱动轮片设于右轮架内,左驱动单元和右驱动单元设于取电板和连接板之间。
所述左驱动单元端部设有左离合器,且所述左离合器设有左离合器拉杆,所述右驱动单元端部设有右离合器,且所述右离合器设有右离合器拉杆。
所述连接板中部下侧设有支撑所述左离合器拉杆和右离合器拉杆的离合支架。
所述左驱动轮装置和右驱动轮装置对称布置。
所述取电装置包括取电支架、取电板、电磁导航和磁导航,取电支架上端与连接板固连,取电板安装于取电支架底部,电磁导航和磁导航安装于取电支架底部前端。
所述连接板中间通过销轴与盘轴承连接,所述连接板上设有编码器组件与盘轴承外齿啮合。
本发明的优点与积极效果为:
1、本发明利用左驱动轮装置和右驱动轮装置实现车体前进后退,并利用两者差速驱动实现车体转弯,并且采用非接触供电方式省却电池部分,大大缩小整车尺寸,而且本发明轮片材质采用VU及PU材质,也进一步减小轮片宽度,这使得本发明外形尺寸较小、功率低且负载大,能够满足重卡自动化装配生产线等行业的使用要求。
2、本发明有效减小滚动摩擦力,且本发明左驱动轮装置和右驱动轮装置上均设有离合器,各个离合器均可通过对应的离合器拉杆实现在外部开关离合器,进而实现人工拖动驱动轮前进转弯等目的,使用灵活,提高了AGV适应性。
附图说明
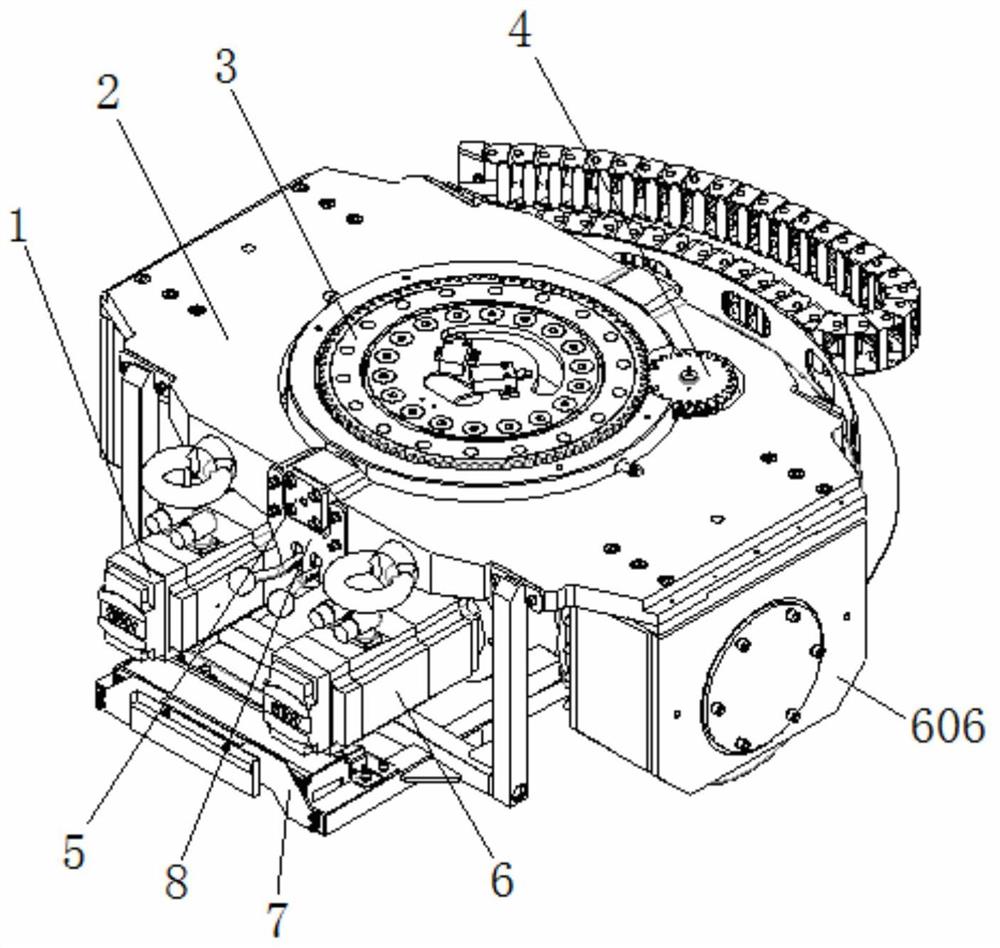
图1为本发明的结构立体示意图一,
图2为本发明的结构立体示意图二,
图3为本发明的结构立体示意图三,
图4为图1中的左驱动轮装置结构示意图,
图5为图1中的右驱动轮装置结构示意图,
图6为图1中的取电装置结构示意图。
其中,1为右驱动轮装置,101为右驱动轮片,102为右离合器拉杆,103为右离合器,104为右连接法兰,105为右驱动单元,106为右轮架,2为连接板,3为盘轴承,4为编码器组件,5为销轴,6为左驱动轮装置,601为左驱动轮片,602为左驱动单元,603为左离合器拉杆,604为左离合器,605为左连接法兰,606为左轮架,7为取电装置,701为取电支架,702为取电板,703为电磁导航,704为磁导航,8为离合支架,9为移动功率单元。
具体实施方式
下面结合附图对本发明作进一步详述。
如图1~6所示,本发明包括左驱动轮装置6、右驱动轮装置1、取电装置7、连接板2和移动功率单元9,其中连接板2中部下侧设有取电装置7,连接板2两端下侧分别设有左轮架606和右轮架106,且左驱动轮装置6安装于所述左轮架606上,右驱动轮装置1安装于所述右轮架106上,所述左驱动轮装置6包括左驱动轮片601和左驱动单元602,所述右驱动轮装置1包括右驱动轮片101和右驱动单元105,且所述左驱动单元602和右驱动单元105设于所述取电装置7和连接板2之间,在所述连接板2上设有盘轴承3用于与车体相连,如图1所示,所述连接板2中间通过销轴5与盘轴承3连接以实现水平偏转,在所述连接板2上设有编码器组件4与盘轴承3外齿啮合用于检测盘轴承3旋转角度,所述盘轴承3和编码器组件4均为本领域公知技术,另外如图3所示,在所述取电装置7和连接板2之间还设有移动功率单元9,所述移动功率单元9为本领域公知技术,其为使用功率电力电子器件进行整流、滤波、逆变的高压变频器部件,本实施例中,所述移动功率单元9的型号为TPM12B030-ENE-5A2-2。本发明工作时在地面铺设专用电缆(电缆预埋地下),取电装置7与地面保持固定距离(15mm以内)并采用感应取电,经所述移动功率单元9处理后向左驱动轮装置6和右驱动轮装置1提供电能。
所述左驱动轮装置6和右驱动轮装置1对称布置,其中如图4所示,所述左驱动轮装置6中的左驱动轮片601设于左轮架606内,并通过左连接法兰605与所述左驱动单元602连接,在所述左驱动单元602端部设有左离合器604,且所述左离合器604通过一左离合器拉杆603实现开合,如图5所示,所述右驱动轮装置1中的右驱动轮片101设于右轮架106内,并通过右连接法兰104与所述右驱动单元105连接,在所述右驱动单元105端部设有右离合器103,且所述右离合器103通过一右离合器拉杆102实现开合,如图1所示,所述连接板2中部下侧设有离合支架8用于支撑所述左离合器拉杆603和右离合器拉杆102,工作人员可拉动相应的离合拉杆实现外部开关对应离合器,进而实现人工拖动前进转弯。本实施例中,各个驱动单元均为减速电机,各个离合器分别与对应的减速电机为一体产品,其产品型号为:HK50_CMPZ71S_BY_PK_RH1M_SB1 M3A-90。
如图6所示,所述取电装置7包括取电支架701、取电板702、电磁导航703和磁导航704,取电支架701上端与连接板2固连,取电板702并排安装于取电支架701底部,电磁导航703和磁导航704间隔安装于取电支架701底部前端,所述电磁导航703和磁导航704为本领域公知技术,本实施例中,所述电磁导航703和磁导航704的型号为GSC1501。本发明工作时,取电板702与地面保持固定距离(15mm以内)并感应取电,此为本领域公知技术,然后经所述移动功率单元9处理后向左驱动轮装置6和右驱动轮装置1提供电能。
所述左驱动轮片601和右驱动轮片101材质采用VU及PU材质,现有同等载荷下,其他材质轮片宽度需要在150mm以上,本发明采用VU及PU材质后轮片宽度减小到100mm。
本发明的工作原理为:
本发明通过左驱动轮装置6、右驱动轮装置1、连接板2组成承重结构,并依靠左驱动轮装置6、右驱动轮装置1分别驱动左驱动轮片601和右驱动轮片101转动实现车体前进后退,连接板2通过盘轴承3与车体连接实现回转,并通过左驱动轮装置6、右驱动轮装置1差速驱动实现转弯,左驱动轮装置6和右驱动轮装置1上均设有离合器,且各个离合器均可通过对应的离合器拉杆实现在外部开关离合器,以实现人工拖动驱动轮前进转弯,另外本发明采用非接触供电,省去电池部分,大大缩小整车尺寸,且两侧驱动轮片材质采用VU及PU材质,在保证重载前提下进一步减小轮片宽度。同等载荷下,现有技术中的重载AGV驱动轮结构功率不小于5kW,本发明驱动功率则小于3kW,另外现有结构车体高度不小于500mm,本发明车体高度可降低到390mm。
- 重载AGV驱动轮及带有该驱动轮的AGV
- 一种重载AGV驱动轮结构