一种前桥校正设备
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及前桥加工校正技术领域,特别是涉及一种前桥校正设备。
背景技术
前桥是传递车架与前轮之间各向作用力及其所产生的弯矩和转矩的装置桥,在热处理后极易发生外弯、内弯和侧弯变形,在前桥的装配过程中,需要对转向限位摆角进行检测,检测合格的前桥则流向下一道工序,不合格的重新进行调整,即对锻造前桥进行校正。
现有技术中一般采用简易工装,利用压力机施加压力后进行校正,操作时需要人工对锻造前桥进行搬运和调整位置,操作较为不便。
例如,授权公告号为CN105478536B的中国专利公开了一种车桥双点校直压机,包括上梁、油缸、压头、V型支撑块、移动工作台、工作台、机架,机架上端装有上梁,工作台装在机架下端,工作台上端装有移动工作台,移动工作台上端两侧装有V型支撑块,上梁上装有油缸,油缸下端装有压头,油缸设计有两个且分别装在上梁两端,油缸两侧设计有压头位移调节装置;移动工作台两侧有测试台安装在工作台两侧位置。该方案通过采用可以在一定范围内调整位置的双压头结构,以提高压制矫直效率,但是并没有公开对于如何上料和下料的机构,如果采用人工操作将会导致浪费人力和效率低下的问题。
再如,申请公布号为CN104707879A的中国专利公开了一种挂车桥自动数字校直机,包括有下压校直装置、校直支撑装置、车轴夹持装置、校直检查装置、车轴输送装置及与各装置电连接的控制装置;下压校直装置包括:带位置反馈的凸轮伺服驱动装置、活动下压横梁及五组活动压块组件;校直支撑装置包括支撑基座、带位置反馈的支撑基座横向伺服驱动装置、支撑块、及带位置反馈的支撑块纵向伺服驱动装置。该方案的下压校直装置,可提供灵活组合和移动的下压点,同时,校直支撑装置能够实现纵向和横向移动,但是缺少上料和下料的机构,仍旧存在前述CN105478536B存在的问题。
因此,现有技术基本上只是对车桥的下压装置和矫直工装进行改进,主要为了能够进行多点校正,以适应不同的型号和变形结构,缺少对于上料和下料的辅助结构的设计。
发明内容
本发明的目的是提供一种前桥校正设备,以解决上述现有技术存在的问题,利用三轴移动机构驱动送料臂移动,能够将前桥放置在支撑体上以及由支撑体上取下,实现对前桥的上料和下料操作,降低人力消耗,提高工作效率,同时,通过将三轴移动机构连接在主机框架上进行相对位置的固定,能够避免倾覆,保证上下料过程的稳定性。
为实现上述目的,本发明提供了如下方案:
本发明提供一种前桥校正设备,包括主机框架、安装在所述主机框架上的压头机构以及位于所述压头机构下方的支撑机构,所述支撑机构包括若干间隔设置的支撑体,所述支撑体与所述压头机构之间形成用于校正前桥的校正区,所述校正区通过上下料机构进行上料和下料,所述上下料机构包括底座、设置在所述底座上的三轴移动机构以及由所述三轴移动机构进行驱动的送料臂;所述底座固定在基础安装面上,所述底座面向所述主机框架的一侧设置有连接所述主机框架的连接架;所述送料臂包括固定部和承载部,所述固定部连接在所述三轴移动机构的移动端,所述承载部悬空连接在所述固定部,所述承载部的移动路径覆盖所述支撑体之间的间隙。
优选地,所述承载部上设置有用于支撑前桥的V型块,所述V型块连接有用于判断是否有前桥放置的有料开关。
优选地,所述三轴移动机构包括纵向移动结构、横向移动结构以及垂直移动结构,所述纵向移动结构包括纵向导轨,所述纵向导轨上滑动设置有所述垂直移动结构,所述垂直移动结构包括垂直导轨,所述垂直导轨上滑动设置有所述横向移动结构,所述横向移动结构包括横向导轨,所述横向导轨上滑动设置有所述送料臂。
优选地,所述垂直移动结构通过纵向气缸驱动在所述纵向导轨上滑动,所述横向移动结构通过垂直气缸驱动在所述垂直导轨上滑动,所述固定部通过第二丝杠驱动在所述横向导轨上滑动。
优选地,所述第二丝杠位于两平行设置的所述横向导轨之间,所述固定部下方连接有承载板,所述承载板垂直跨越所述第二丝杠,且所述承载板的两端连接有与两所述横向导轨配合的滑块,所述滑块与所述横向导轨采用T型防脱结构滑动连接。
优选地,所述主机框架上安装有压头移动机构,所述压头机构通过加载机构安装在所述压头移动机构上,所述压头移动机构包括平行设置的直线导轨和第一丝杠,所述第一丝杠连接有丝母,所述直线导轨连接有滑块,所述丝母和所述滑块固定连接在所述加载机构上,所述第一丝杠的两端分别通过轴承座安装在所述主机框架上,其中一端连接有动力机构,所述直线导轨的两端连接在所述主机框架上。
优选地,所述加载机构通过椭圆键与所述丝母、所述滑块连接,加载受力时所述加载机构浮动,并贴紧所述主机框架。
优选地,所述压头机构包括压头本体和若干压头,所述压头通过位置调整结构安装在所述压头本体下方。
优选地,所述支撑体分为基准支撑和可调支撑,所述基准支撑用于对前桥进行定位,所述可调支撑用于配合所述压头机构实现三点弯曲产生塑性变形。
优选地,所述主机框架上安装有防护罩,所述防护罩罩设在所述校正区的外侧。
本发明相对于现有技术取得了以下技术效果:
(1)本发明利用三轴移动机构驱动送料臂移动,能够将前桥(锻造前桥)放置在支撑体上以及由支撑体上取下,实现对前桥的上料和下料操作,降低人力消耗,提高工作效率,同时,通过将三轴移动机构连接在主机框架上进行相对位置的固定,能够避免倾覆,保证上下料过程的稳定性;
(2)本发明将第二丝杠设置在平行的横向导轨之间,利用第二丝杠驱动承载板移动,同时利用两横向导轨对送料臂的固定部进行支撑,能够进一步保证悬空设置的承载部在承载前桥时的稳定性,避免送料臂受力造成第二丝杠的变形,保证第二丝杠顺利工作;
(3)本发明将压头机构通过加载机构安装在压头移动机构上,能够利用压头移动机构驱动压头机构调整在主机框架上的相对位置,即调整压头机构相对所放置的前桥的位置,调整切换校直点,对不同变形状态的前桥进行校正;
(4)本发明加载机构通过椭圆键与压头移动机构的丝母、滑块连接,即加载机构和压头移动机构之间具有浮动间隙,在驱动加载机构横向移动时,可以正常驱动,在竖向加载受力时,加载机构可以上下浮动,并贴紧主机框架,此时,加载机构只是将加载受力传递到主机框架,而不会传递到压头移动机构,从而能够在加载过程中避免对于压头移动机构造成影响。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
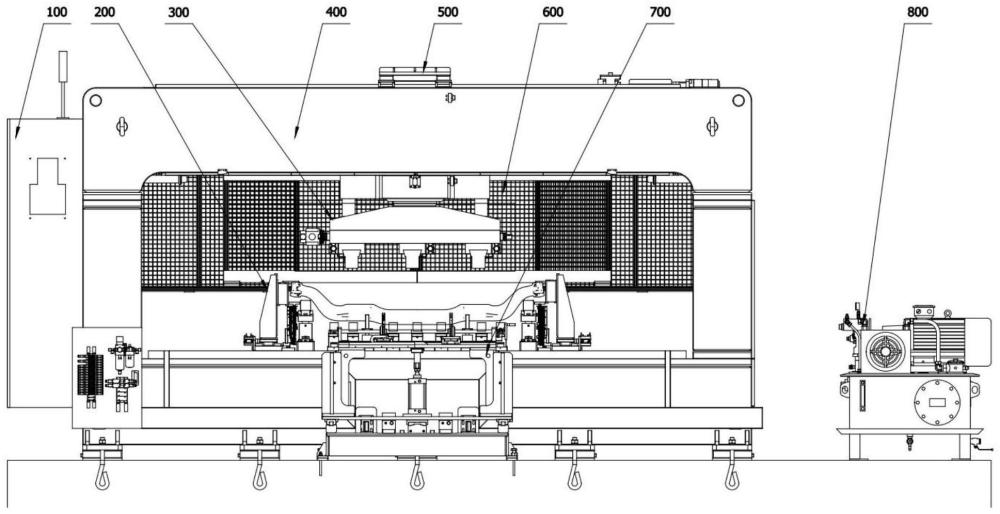
图1为本发明整体结构示意图;
图2为图1中压头移动机构示意图;
图3为本发明压头机构和校正工装示意图;
图4为本发明上下料机构主视图;
图5为本发明上下料机构侧视图;
图6为本发明上下料机构俯视图;
其中,100、电控柜及操作面板;200、校正工装;210、压头机构;220、基准支撑;230、可调支撑;240、测量机构;300、加载机构;400、主机框架;500、压头移动机构;510、电机;520、减速机;530、连接座;540、联轴器;550、第一丝杠;560、直线导轨;570、轴承座;600、防护罩;700、上下料机构;701、V型块;702、有料开关;703、送料臂;704、连接架;705、垂直导轨;706、垂直气缸;707、连接板;708、支架;709、支撑块;710、横向导轨;711、手轮;712、第二丝杠;713、纵向导轨;714、纵向气缸;715、底座;716、承载板;800、液压站;900、前桥。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种前桥校正设备,以解决现有技术存在的问题,利用三轴移动机构驱动送料臂移动,能够将前桥放置在支撑体上以及由支撑体上取下,实现对前桥的上料和下料操作,降低人力消耗,提高工作效率,同时,通过将三轴移动机构连接在主机框架上进行相对位置的固定,能够避免倾覆,保证上下料过程的稳定性。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
如图1~6所示,本发明提供一种前桥校正设备,包括主机框架400和安装在主机框架400上的校正工装200,校正工装200包括安装在主机框架400上的压头机构210以及位于压头机构210下方的支撑机构,其中,主机框架400作为连接各部件的机体,压头机构210通过加载机构300连接在主机框架400上,通过加载机构300推动压头机构210向下移动,主机框架400承载加载过程中的校直力。支撑机构用于支撑前桥900,压头机构210与支撑机构配合对前桥900实现三点弯曲产生塑性变形进行校正。支撑机构通过T型螺母和T型槽与主机框架400相连,有利于调整位置并锁紧,支撑机构包括若干间隔设置的支撑体,支撑体可以包括基准支撑220及可调支撑230,支撑体与压头机构210之间形成用于校正前桥900的校正区,在压头机构210上移后,可以将前桥900放置在支撑体上,然后下移压头机构210对前桥900进行校正。具体的,校正区通过上下料机构700进行上料和下料,上下料机构700包括底座715、设置在底座715上的三轴移动机构以及由三轴移动机构进行驱动的送料臂703。三轴移动机构具有横向、纵向和垂直方向三个移动方向,可以到达其移动空间范围内的任一点。底座715可以通过地脚螺丝固定在基础安装面上,底座715面向主机框架400的一侧设置有连接主机框架400的连接架704,通过设置连接架704,一方面,上下料机构700能够通过主机框架400对横向位置进行限定,另一方面,在送料臂703承载有前桥900时,可以防止上下料机构700倾覆。送料臂703包括固定部和承载部,固定部连接在三轴移动机构的移动端,承载部悬空连接在固定部,在三轴移动机构的驱动作用下,承载部的移动路径可以覆盖支撑体之间的间隙,即悬空设置的承载部可以伸入/伸出支撑体之间的间隙。在上料时,将承载部伸入间隙内,下移承载部,承载部上承载的前桥900可以下落放置到支撑体上,再向外伸出承载部,完成上料;在下料时,将承载部伸入间隙内,上移承载部,承载部将支撑体上的前桥900支撑起,再向外移动承载部,完成下料。从而,能够顺利对前桥900进行上料和下料操作。综上所述,本发明利用三轴移动机构驱动送料臂703移动,能够将前桥900放置在支撑体上以及由支撑体上取下,实现对前桥900的上料和下料操作,降低人力消耗,提高工作效率,同时,通过将三轴移动机构连接在主机框架400上进行相对位置的固定,能够避免倾覆,保证上下料过程的稳定性。
如图4和图6所示,送料臂703并列设置有一对,在移动前桥900时可以保证稳定性。承载部上设置有用于支撑前桥900的V型块701,将前桥900放置在V型块701上后,在移动时,能够进一步保持前桥900稳定性。V型块701连接有用于判断是否有前桥900放置的有料开关702,能够在上料前判断是否有料,有料开关702可以采用光线传感器、压力传感器等形式。
如图4~6所示,三轴移动机构包括纵向移动结构、横向移动结构以及垂直移动结构,纵向移动结构包括纵向导轨713,纵向导轨713安装在底座715上,纵向导轨713上滑动设置有垂直移动结构,垂直移动结构可以在纵向导轨713上朝向或远离支撑体移动。垂直移动结构包括垂直导轨705,垂直导轨705通过支架708进行固定,支架708支撑在底座715和连接板707之间,垂直导轨705上通过支撑块709滑动设置有横向移动结构,支撑块709与垂直导轨705滑动连接,横向移动结构可以在垂直导轨705上在高度方向移动。横向移动结构包括横向导轨710,横向导轨710安装在连接板707上,横向导轨710上滑动设置有送料臂703,送料臂703可以在横向导轨710上在水平面上垂直于纵向导轨713的方向移动。
垂直移动结构通过纵向气缸714驱动在纵向导轨713上滑动,纵向气缸714的固定端连接在底座715上,纵向气缸714的活动端连接在垂直气缸706的基座上。横向移动结构通过垂直气缸706驱动在垂直导轨705上滑动,垂直气缸706的固定端通过基座与纵向气缸714的活动端连接,垂直气缸706的活动端连接有连接板707。送料臂703的固定部通过第二丝杠712驱动在横向导轨710上滑动,第二丝杠712转动设置在连接板707上,送料臂703设置有与第二丝杠712螺纹连接的丝母,第二丝杠712的端部可以设置有手轮711,利用手轮711可以驱动第二丝杠712转动进而带动送料臂703移动,第二丝杠712可以采用左右旋丝杆,通过左右旋丝杠实现送料臂703沿横向导轨710居中移动以调整V型块701间距,满足不同长度前桥900的上料要求。
第二丝杠712位于两平行设置的横向导轨710之间,送料臂703的固定部下方连接有承载板716,承载板716垂直跨越第二丝杠712,承载板716的两端连接有与两横向导轨710配合的滑块,滑块与横向导轨710采用T型防脱结构滑动连接。通过利用两横向导轨710对送料臂703的固定部进行支撑,能够进一步保证悬空设置的承载部在承载前桥900时的稳定性,避免送料臂703受力造成第二丝杠712的变形,保证第二丝杠712顺利工作。
上下料机构700的工作过程:人工或机器人将前桥900摆放至V型块701,垂直气缸706驱动前桥900上升,纵向气缸714推动前桥900前进至校正区,垂直气缸706驱动前桥900下降,放至校正区进行校正,校正完毕,垂直气缸706驱动前桥900上升,纵向气缸714推动前桥900从校正区退出,垂直气缸706驱动前桥900下降,人工或机器人将前桥900取走。
如图1~3所示,主机框架400上安装有压头移动机构500,压头机构210通过加载机构300安装在压头移动机构500上,通过压头移动机构500可以带动加载机构300移动进而带动压头机构210移动,加载机构300可以采用液压油缸进行驱动的方式驱动压头机构210朝向前桥900加载。压头移动机构500包括平行设置的直线导轨560和第一丝杠550,第一丝杠550连接有丝母,直线导轨560连接有滑块,丝母和滑块固定连接在加载机构300上,通过第一丝杠550作为动力驱动丝母移动进而带动加载机构300移动,通过直线导轨560约束滑块进而约束加载机构300的移动方向。第一丝杠550的两端分别通过轴承座570安装在主机框架400上,其中一端连接有动力机构,动力机构包括电机510,电机510连接有减速机520,电机510和减速机520轴孔配合,减速机520自带胀紧套锁紧电机510输出轴,两者法兰通过螺栓连接。连接座530通过螺栓固定于主机框架400,连接座530远离第一丝杠550的一侧通过螺栓与减速机520相连,减速机520与第一丝杠550通过联轴器540相连,连接座530靠近第一丝杠550的一侧通过轴承座570支撑第一丝杠550。通过电机510带动第一丝杠550转动,可以带动丝母直线移动,进而带动加载机构300沿直线导轨560移动,改变加载机构300相对于前桥900的位置,压头机构210通过加载机构300安装在压头移动机构500上,能够利用压头移动机构500驱动压头机构210调整在主机框架400上的相对位置,即调整压头机构210相对所放置的前桥900的位置,调整切换校直点,对不同变形状态或不同尺寸的前桥900进行校正。
加载机构300在连接压头移动机构500时,可以设置椭圆键,通过椭圆键与丝母、滑块连接,即加载机构300和压头移动机构500之间具有浮动间隙,并且,加载机构300在进行加载时能够贴紧主机框架400。在驱动加载机构300横向移动时,可以正常驱动,在竖向加载受力时,加载机构300可以上下浮动,并贴紧主机框架400,此时,加载机构300只是将加载受力传递到主机框架400,而不会传递到压头移动机构500,从而能够在加载过程中避免对于压头移动机构500造成影响。
如图3所示,压头机构210包括压头本体和若干压头,压头通过位置调整结构安装在压头本体下方,通过位置调整结构可以调整压头的位置,以能改变压头相对前桥900的位置,进行更精确的校正。
支撑体可以分为基准支撑220和可调支撑230,基准支撑220用于对前桥900进行定位,可调支撑230用于配合压头机构210实现三点弯曲产生塑性变形。还可以设置有测量机构240,用于测量前桥900的变形程度,以进行相应的校正,并判断校正结果是否符合要求。在上料或测量时,基准支撑220对前桥900进行支撑,在校正过程中,可调支撑230对前桥900进行支撑,以利用基准支撑220达到更高的测量精度,保证最终校正的精度。
如图1所示,主机框架400上可以安装有防护罩600,防护罩600罩设在校正区的外侧,通过螺栓与主机框架400相连,防护可靠且必要时可以拆卸,以保护校直区域人员安全。电控柜及操作面板100通过螺栓与主机框架400相连,方便走线及转运,用于存放电控系统及人机操作界面,实现对校正过程和上下料过程的控制。还包括有液压站800,通过地脚螺栓固定于地面,与设备之间管线连接,为加载机构300等的运行提供液压动力。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。