一种智能焊接装置
文献发布时间:2023-06-19 19:27:02
技术领域
本发明涉及智能焊接领域,具体为一种智能焊接装置。
背景技术
履带式起重机(crawlercrane),是一种利用履带行走的动臂旋转起重机。履带接地面积大、通过性好、适应性强、可带载行走,适用于多场合(风电、石化、地铁、桥梁、装配式建筑等)的吊装作业。随着装备大型化、设计集约化、施工模块化的发展趋势,履带式起重机得到越来越广泛的应用。桁架式臂架则是履带式起重机的核心部件,它关系到吊装工作能否安全、高效完成;
在由于臂架的焊缝轨迹几乎全部是由空间相贯线构成,这种形状的焊缝对焊工的技能要求非常高,需要长时间钻研、练习才能达到焊接要求,当前全国乃至世界范围内均是靠经验丰富、技能高超的焊工手工完成焊接,劳动强度大、工作效率低、产品一致性差,产品质量也会出现在所难免的波动,为此我们提出一种智能焊接装置来解决上述问题。
发明内容
本发明提出的一种智能焊接装置,解决了在由于臂架的焊缝轨迹几乎全部是由空间相贯线构成,这种形状的焊缝对焊工的技能要求非常高,需要长时间钻研、练习才能达到焊接要求,当前全国乃至世界范围内均是靠经验丰富、技能高超的焊工手工完成焊接,造成劳动强度大、工作效率低、产品一致性差,产品质量也会出现在所难免的波动的问题。
为了实现上述目的,本发明采用了如下技术方案:
一种智能焊接装置,包括主弦杆,所述主弦杆的上端连接有腹杆,所述腹杆的外侧一侧设置有第一夹持块,所述腹杆的外侧另一侧设置有第二夹持块,所述第一夹持块的内部设置有旋转机构,所述第二夹持块的侧面连接有移动机构,所述移动机构的侧面连接有摆角机构,所述摆角机构包括焊枪,所述焊枪的中间连接有摆角块,所述摆角块的外侧滑动连接有弧形导轨,所述旋转机构包括两个主旋转轮,所述主旋转轮的侧面设置有多个次旋转轮,所述主旋转轮设置在第一夹持块的内部,所述移动机构包括滑块,所述滑块与弧形导轨连接,所述滑块的内部套设有丝杆。
作为本发明的一种优选方案,所述第一夹持块的后端连接有第一连接块,所述第二夹持块的后端连接有两个第二连接块,所述第二夹持块的上端连接有第三电机,所述第一夹持块的侧面开设有多个环孔,所述第二夹持块的侧面连接有多个环杆,所述环杆设置在环孔的内部,呈滑动连接。
作为本发明的一种优选方案,所述第三电机的输出端连接有第二连接杆,所述第二连接杆转动连接在第二连接块的内部,所述第二连接杆固定连接在第一连接块的内部。
作为本发明的一种优选方案,所述第一夹持块的侧面连接有侧板,所述侧板的上端连接有第一电机,所述第一电机的输出端连接有第一转动环,所述第一转动环的外侧套设有第一皮带。
作为本发明的一种优选方案,所述第一皮带的另一端套设有第二转动环,所述第二转动环的下端连接有第一齿轮,两个所述主旋转轮的中间通过第一连接杆连接。
作为本发明的一种优选方案,所述第一连接杆的中间外侧套设有第二齿轮,所述第二齿轮与第一齿轮连接,两个所述次旋转轮通过第一连接杆连接,所述第一连接杆设置在第一夹持块的内部,呈转动连接,所述第一连接杆转动连接在第二夹持块的内部。
作为本发明的一种优选方案,所述第二夹持块的一侧连接有侧架,所述侧架的内部设置有多条滑杆,所述滑块的侧面与滑杆滑动连接,所述侧架的内部下端连接有定位环。
作为本发明的一种优选方案,所述丝杆的下端转动连接在定位环的内部,所述侧架的上端连接有第二电机,所述第二电机的输出端与丝杆的上端连接。
作为本发明的一种优选方案,所述摆角块的前后两侧设置有多个上下分布的滑动环,所述滑动环与弧形导轨的上下两侧滑动连接,所述摆角块的一侧内部设置有两个第三齿轮,所述弧形导轨的内部连接有两条齿环,所述齿环的上侧与第三齿轮的外侧连接。
作为本发明的一种优选方案,两个所述第三齿轮的中间通过第三连接杆连接,所述摆角块的侧面设置有多个圆环,所述第三连接杆转动连接在圆环的内部,所述第三连接杆的中间套设有第二皮带,所述摆角块的侧面连接有第四电机,所述第四电机的输出端连接有第三转动环,所述第二皮带的另一端套设在第三转动环的外侧。
本发明的有益效果为:
1、本智能焊接装置可以对履带吊臂架进行自动焊接,提高焊接效率、降低劳动强度、提升焊接质量,有郊缓解焊工劳动力短缺对本行业的影响。
2、本智能焊接装置因是使用电机带动焊枪旋转与转角焊接,所以焊接处一致性较高,避免产品质量的波动,适合批量工作。
综上所述,该装置可以对履带吊臂架进行自动焊接,提高焊接效率、降低劳动强度、提升焊接质量,有郊缓解焊工劳动力短缺对本行业的影响。
附图说明
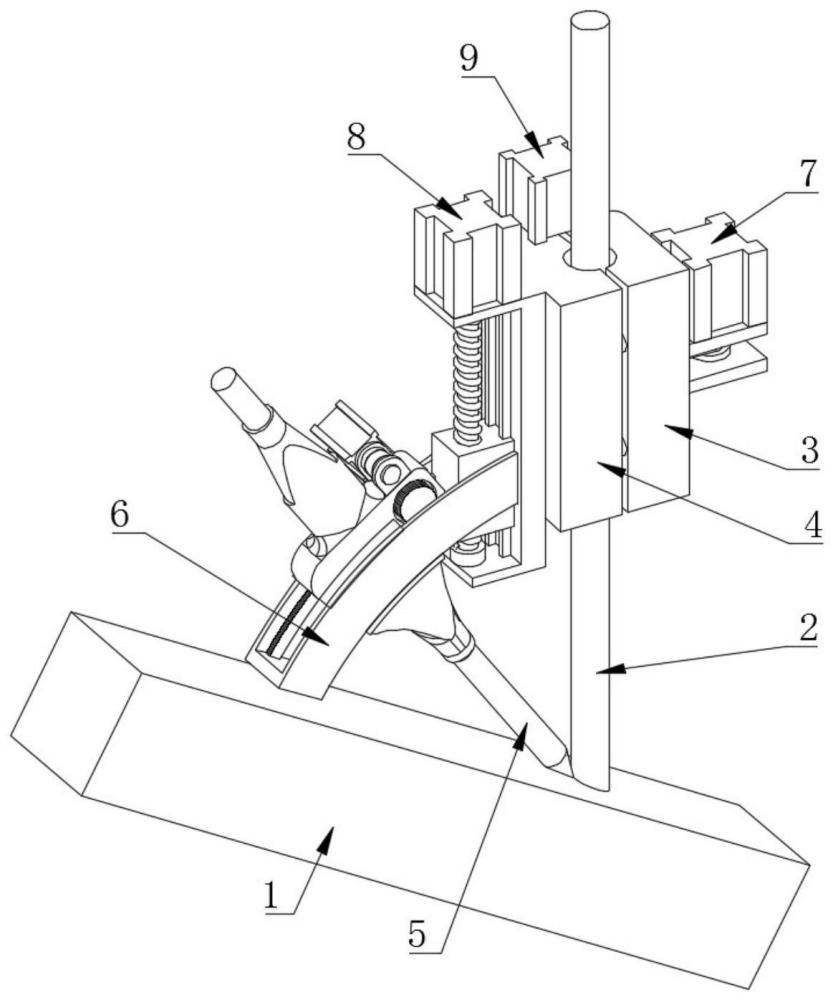
图1为本发明的前面视角结构示意图。
图2为本发明的旋转机构内部结构示意图。
图3为本发明的夹持机构后面结构示意图。
图4为本发明的夹持机构前面结构示意图。
图5为本发明的移动机构前面结构示意图。
图6为本发明的移动机构侧面结构示意图。
图7为本发明的摆角机构侧面结构示意图。
图8为本发明的摆角机构内部结构示意图。
图9为本发明的摆角机构剖面结构示意图。
图中标号:1、主弦杆;2、腹杆;3、第一夹持块;4、第二夹持块;5、焊枪;6、弧形导轨;7、第一电机;8、第二电机;9、第三电机;10、第一转动环;11、第一皮带;12、第二转动环;13、第一齿轮;14、第二齿轮;15、第一连接杆;16、主旋转轮;17、次旋转轮;18、侧板;19、第一连接块;20、第二连接块;21、第二连接杆;22、侧架;23、定位环;24、环杆;25、环孔;26、滑杆;27、摆角块;28、丝杆;29、滑块;30、第四电机;31、齿环;32、滑动环;33、第三齿轮;34、第三转动环;35、第二皮带;36、第三连接杆;37、圆环。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-图9所示,本实施例提供一种智能焊接装置,包括主弦杆1,主弦杆1的上端连接有腹杆2,腹杆2的外侧一侧设置有第一夹持块3,腹杆2的外侧另一侧设置有第二夹持块4,第一夹持块3的内部设置有旋转机构,第二夹持块4的侧面连接有移动机构,移动机构的侧面连接有摆角机构,摆角机构包括焊枪5,焊枪5的中间连接有摆角块27,摆角块27的外侧滑动连接有弧形导轨6,旋转机构包括两个主旋转轮16,主旋转轮16的侧面设置有多个次旋转轮17,主旋转轮16设置在第一夹持块3的内部,移动机构包括滑块29,滑块29与弧形导轨6连接,滑块29的内部套设有丝杆28,丝杆28用于带动滑块29上下移动。
如图3-图4所示,第一夹持块3的后端连接有第一连接块19,第二夹持块4的后端连接有两个第二连接块20,第二夹持块4的上端连接有第三电机9,第一夹持块3的侧面开设有多个环孔25,第二夹持块4的侧面连接有多个环杆24,环杆24设置在环孔25的内部,呈滑动连接,第三电机9的输出端连接有第二连接杆21,第二连接杆21转动连接在第二连接块20的内部,第二连接杆21固定连接在第一连接块19的内部,环孔25配合环杆24用于固定住第一夹持块3与第二夹持块4的位置,防止错位。
如图2所示,第一夹持块3的侧面连接有侧板18,侧板18的上端连接有第一电机7,第一电机7的输出端连接有第一转动环10,第一转动环10的外侧套设有第一皮带11,第一皮带11的另一端套设有第二转动环12,第二转动环12的下端连接有第一齿轮13,两个主旋转轮16的中间通过第一连接杆15连接,第一连接杆15的中间外侧套设有第二齿轮14,第二齿轮14与第一齿轮13连接,两个次旋转轮17通过第一连接杆15连接,第一连接杆15设置在第一夹持块3的内部,呈转动连接,第一连接杆15转动连接在第二夹持块4的内部,主旋转轮16与次旋转轮17配合用于带动设备随腹杆2旋转,达到调整旋转角度的目的。
如图5-图6所示,第二夹持块4的一侧连接有侧架22,侧架22的内部设置有多条滑杆26,滑块29的侧面与滑杆26滑动连接,侧架22的内部下端连接有定位环23,丝杆28的下端转动连接在定位环23的内部,侧架22的上端连接有第二电机8,第二电机8的输出端与丝杆28的上端连接,滑块29用于带动摆角机构上下移动。
如图7-图9所示,摆角块27的前后两侧设置有多个上下分布的滑动环32,滑动环32与弧形导轨6的上下两侧滑动连接,摆角块27的一侧内部设置有两个第三齿轮33,弧形导轨6的内部连接有两条齿环31,齿环31的上侧与第三齿轮33的外侧连接,两个第三齿轮33的中间通过第三连接杆36连接,摆角块27的侧面设置有多个圆环37,第三连接杆36转动连接在圆环37的内部,第三连接杆36的中间套设有第二皮带35,摆角块27的侧面连接有第四电机30,第四电机30的输出端连接有第三转动环34,第二皮带35的另一端套设在第三转动环34的外侧,第三齿轮33配合齿环31用于调整焊枪5的角度。
本发明的工作原理:在使用时将腹杆2放在第一夹持块3与第二夹持块4的中间,启动第三电机9带动第二连接杆21随第二连接块20旋转,第二连接杆21带动第一连接块19转动,第一连接块19带动第一夹持块3转动,将环杆24插入环孔25的内部,固定住第一夹持块3与第二夹持块4的上下位置,防止错位,将主旋转轮16与次旋转轮17夹住腹杆2,达到将设备固定在腹杆2上的目的;
在需要旋转设备角度时启动第一电机7,第一电机7带动第一转动环10转动,第一转动环10带动第一皮带11转动,第一皮带11带动第二转动环12转动,第二转动环12带动第一齿轮13转动,第一齿轮13带动第二齿轮14转动,第二齿轮14带动第一连接杆15转动,第一连接杆15带动主旋转轮16转动,主旋转轮16随腹杆2转动带动次旋转轮17转动,主旋转轮16带动第一夹持块3与第二夹持块4随腹杆2旋转,达到调整设备旋转角度的目的;
在需要调整摆角机构上下位置时启动第二电机8,所述第二电机8带动丝杆28随定位环23转动,丝杆28带动滑块29上下移动,滑块29带动摆角机构上下移动,达到调整摆角机构上下位置的目的;
在需要调整摆角角度时启动第四电机30带动第三转动环34转动,第三转动环34带动第二皮带35转动,第二皮带35带动第三连接杆36随圆环37转动,第三连接杆36带动第三齿轮33转动,第三齿轮33转动时随齿环31移动,第三齿轮33带动摆角块27移动,摆角块27带动焊枪5移动,达到调整摆角角度的目的。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种智能焊接控制方法及装置
- 一种船舶板材智能焊接定位装置
- 基于焊接机器人的一种自带缓冲的智能装置
- 一种具三单元多维度的智能焊接装置
- 一种智能液压压紧焊接装置及其智能液压压紧焊接系统
- 一种智能焊接方法、智能焊接系统及计算机存储介质