基于透射射线的检测系统、检测方法以及检测装置
文献发布时间:2024-01-17 01:26:37
技术领域
本申请涉及安防领域,特别涉及一种基于透射射线的检测系统、一种基于透射射线的检测方法、以及一种基于透射射线的检测装置。
背景技术
在用于安防的检测系统中,常使用诸如X射线等透射射线对诸如便携式箱包或物流包裹等实时传送的被检对象进行透射成像。由于射线穿透被测对象后的强度将发生衰减,并且,基于透射成像得到的透射图像中的像素值可以体现透射射线的衰减程度,因此,通过透射图像中的像素值,可以识别出被检对象的内部物质的物质类别。
其中,诸如毒品和爆炸物等危及人身安全的危险物质属于低原子序数的有机物,其衰减系数远低于诸如金属等高原子序数的无机物对透射射线的衰减系数,因此,在以此类危险物质为目标物质而对透射图像进行目标识别时,若透射图像中存在表征射线弱衰减的像素区域,则,可以成功识别出被检对象的内部具有此类危险物质。
然而,若被检对象内部的上述危险物质被藏匿在高原子序数的无机物中,例如,危险物质被藏匿在金属制品的夹层中,则,藏匿危险物质的高原子序数无机物会对透射射线产生强衰减,以至于在以此类危险物质为目标物质而对透射图像进行目标识别时,透射图像中的对应像素区域无法体现出此类危险物质应有的射线弱衰减程度,从而导致对藏匿的目标物质的漏检。
虽然诸如XRD(X-ray diffraction,X射线衍射)等基于透射射线衍射的衍射检测可以识别出藏匿在高原子序数无机物中的目标物质,但是,基于透射射线衍射的衍射检测耗时较长,无法适用于存在实时传送需求的检测系统,因此,衍射检测不能替代检测系统中既有的透射成像方式。
如上可见,如何在兼顾实时传送需求的情况下避免对藏匿的目标物质的漏检,成为现有技术中有待解决的技术问题。
发明内容
有鉴于此,本申请的实施例提供一种基于透射射线的检测系统、一种基于透射射线的检测方法、以及一种基于透射射线的检测装置,有助于在兼顾实时传送需求的情况下避免对藏匿的目标物质的漏检。
在本申请的一个实施例中,一种基于透射射线的检测系统包括:
第一传送机构,用于传送被检对象途经成像检测通道,所述成像检测通道部署有用于产生第一透射射线的第一射线源、以及背散射探测器阵列,所述背散射探测器阵列用于基于所述第一透射射线在所述被检对象形成的背散射射线生成背散射成像数据;
第二传送机构,用于传送所述被检对象途经衍射检测通道,所述衍射检测通道部署有用于产生第二透射射线的第二射线源、以及衍射检测组件,所述衍射检测组件用于基于所述第二透射射线穿透所述被检对象产生的衍射射线生成衍射能量谱数据;
处理器组件,用于:
利用基于所述背散射成像数据生成的背散射图像,筛查所述被检对象中是否包括可疑藏匿封装体;
响应于对所述可疑藏匿封装体的成功筛查,将被所述第一传送机构传送出所述成像检测通道的所述被检对象转移至所述第二传送机构,以促使所述被检对象被所述第二传送机构送达所述衍射检测通道;
基于在所述被检对象位于所述衍射检测通道的期间内生成的所述衍射能量谱数据,确定所述可疑藏匿封装体中是否藏匿有所述目标物质。
在一些示例中,可选地,所述成像检测通道还部署有透射探测器阵列,所述透射探测器阵列用于基于所述第一透射射线穿透所述被检对象后的透射衰减射线产生透射成像数据;所述处理器组件被具体配置为:在基于所述透射成像数据生成的透射图像中,识别所述被检对象中的所述目标物质;利用所述背散射图像,筛查所述被检对象中除所述目标物质之外的非目标物质是否包括可疑藏匿封装体。
在一些示例中,可选地,所述处理器组件被具体配置为:在所述背散图像中检测用于表征所述可疑藏匿封装体的高亮像素区域,所述高亮像素区域中的各像素的像素值均高于预设像素阈值。
在一些示例中,可选地,所述成像检测通道还部署有透射探测器阵列,所述透射探测器阵列用于基于所述第一透射射线穿透所述被检对象后的透射衰减射线产生透射成像数据;所述处理器组件被具体配置为:基于对所述背散射图像的尺度转换,生成与基于所述透射成像数据生成的透射图像具有适配尺度的适配背散射;确定所述目标物质在所述透射图像中的目标识别区域,在所述适配背散射图像中位置匹配的像素映射区域,并且将所述适配背散射图像中的所述像素映射区域的像素值置零;基于对所述适配背散射图像中的非零像素的轮廓检测,得到对所述被检对象的内部物质在所述适配背散射图像中的轮廓位置区域;基于所述轮廓位置区域,对所述背散射图像进行区域分割;在所述背散射图像中通过所述区域分割得到的各像素区域中,搜索所述高亮像素区域。
在一些示例中,可选地,所述处理器组件进一步用于:响应于对所述可疑藏匿封装体的成功筛查,以所述可疑藏匿封装体在所述第一传送机构的扫描传送方向上的扫描识别位置为起始位置,对所述可疑藏匿封装体进行位置跟踪,所述位置跟踪与所述第一传送机构的第一传送速率、以及所述第二传送机构的第二传送速率关联;基于对所述可疑藏匿封装体的位置跟踪结果,确定所述可疑藏匿封装体到达所述衍射检测通道。
在一些示例中,可选地,所述第二透射射线沿垂直于所述第二传送机构的送检传送方向的线性方向分布;所述处理器组件被具体配置为:当所述位置跟踪结果与所述线性覆盖范围位置匹配时,确定所述可疑藏匿封装体到达所述衍射检测通道。
在一些示例中,可选地,所述处理器组件进一步用于:基于所述可疑藏匿封装体的图像位置信息,确定所述可疑藏匿封装体在所述成像检测通道的通道宽度方向上的横向定位位置、以及空间深度方向上的深度定位位置,其中,所述通道宽度方向垂直于所述第一传送机构的扫描传送方向,并且,所述扫描传送方向和所述通道宽度方向平行于所述第一传送机构的承载平面,所述空间深度方向垂直于所述第一传送机构的承载平面;基于所述横向定位位置和所述深度定位位置,确定所述衍射检测组件在所述可疑藏匿封装体位于所述衍射检测通道的期间内对衍射射线的射线接收位置。
在一些示例中,可选地,所述衍射检测组件可移动地装设在所述衍射检测通道内,所述第二透射射线的准直方向垂直于所述第二传送机构的承载平面,所述第二透射射线沿垂直于所述第二传送机构的送检传送方向的线性方向分布,并且,所述衍射检测组件在所述衍射检测通道内的移动方向平行于所述线性方向;所述衍射检测组件包括至少两个检测单元,至少两个所述检测单元的单元检测范围沿所述第二透射射线的准直方向交错排布,并且,至少两个所述检测单元分别用于基于在所述第二透射射线的准直方向上的不同位置区域接收到的所述衍射射线生成所述衍射能量谱数据;所述处理器组件被具体配置为:基于所述横向定位位置,确定所述衍射检测组件在所述线性方向上的目标偏移位置;基于所述深度定位位置,确定在所述第二透射射线的准直方向上的目标位置区域,以促使在所述目标位置区域接收所述衍射射线的所述检测单元被选通;其中,所述目标偏移位置和所述目标位置区域用于表征所述射线接收位置。
在一些示例中,可选地,所述成像检测通道还部署有透射探测器阵列,所述透射探测器阵列用于基于所述第一透射射线穿透所述被检对象后的透射衰减射线产生透射成像数据,并且,所述透射成像数据用于生成透射图像;所述背散射探测器阵列以第一射线接收角度接收所述背散射射线,所述透射探测器阵列以第二射线接收角度接收所述透射衰减射线,所述第一射线接收角度和所述第二射线接收角度之间存在角度差异,所述角度差异所在的角平面、以及所述空间深度方向垂直于与所述背散射探测器阵列和所述透射探测器阵列的阵列平面,并且,所述空间深度方向平行于所述角平面;所述处理器组件被具体配置为:基于所述可疑藏匿封装体在所述背散射图像和所述透射图像中的图像位置信息,确定所述可疑藏匿封装体在所述透射探测器阵列和所述背散射探测器阵列的定位参考方向上的成像位置,其中,所述定位参考方向平行于所述角平面与所述背散射探测器阵列和所述透射探测器阵列的阵列平面的交线;基于所述成像位置、以及预先设定的位置转换参数,确定所述横向定位位置和所述深度定位位置,其中,所述位置转换参数与所述角度差异关联。
在一些示例中,可选地,所述背散射探测器阵列和所述透射探测器阵列的阵列平面相互平行,所述空间深度方向垂直于所述背散射探测器阵列和所述透射探测器阵列的阵列平面,并且,所述定位参考方向包括所述背散射探测器阵列和所述透射探测器阵列的行列方向中平行于所述角平面的其中一个方向;所述位置转换参数包括:所述定位参考方向上的任意坐标位置与所述可疑藏匿封装体的空间位置在所述角平面内的投影位置之间的平面几何关系,所述平面几何关系与所述第一射线接收角度和所述第二射线接收角度关联;所述处理器组件被具体配置为:基于所述图像位置信息,确定所述背散射探测器阵列和所述透射探测器阵列中对所述可疑藏匿封装体成像的目标探测器在所述定位参考方向上的阵列坐标位置,所述阵列坐标位置用于表征所述成像位置;基于所述阵列坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述背散射探测器阵列和所述透射探测器阵列的行方向均平行于所述通道宽度方向,所述定位参考方向包括所述背散射探测器阵列和所述透射探测器阵列的行方向,并且,所述阵列坐标位置包括:所述背散射探测器阵列中对所述可疑藏匿封装体成像的第一目标探测器的第一行坐标位置,以及,所述透射探测器阵列中对所述可疑藏匿封装体成像的第二目标探测器的第二行坐标位置;所述处理器组件被具体配置为:基于所述第一行坐标位置和所述第二行坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述平面几何关系包括:所述角平面内的虚拟三角形的底高转换关系,所述虚拟三角形具有平行于所述定位参考方向的底边、以及与所述底边相对的顶点,所述底边的两侧底角分别与所述第一射线接收角度和所述第二射线接收角度的角度值关联,所述顶点用于表征所述可疑藏匿封装体在所述角平面内的投影位置,并且,所述底高转换关系用于表征所述底边的边长与所述顶点相对于所述底边的高之间的尺寸关系;所述处理器组件被具体配置为:基于所述第二行坐标位置,确定所述虚拟三角形与所述第二射线接收角度关联的一侧底角的目标角度值,所述第二射线接收角度包括在所述透射探测器阵列的行方向上的多个探测器处分别对应的不同角度值,并且,所述目标角度值与所述第二射线接收角度在所述第二目标探测器处对应的角度值关联;基于所述第一行坐标位置相比于参考行坐标位置的位置偏移量,确定所述底边在所述虚拟三角形与所述第二射线接收角度关联的一侧底角为所述目标角度值时的边长,其中,所述参考行坐标位置为所述第一射线源沿所述空间深度方向在所述背散射探测器阵列的投影位置;基于所述底边的边长和所述尺寸关系,确定所述虚拟三角形的所述顶点相对于所述底边的高;基于所述顶点相对于所述底边的高,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述背散射探测器阵列包括第一背散射探测器阵列和第二背散射探测器阵列,所述第一背散射探测器阵列以第一射线接收角度接收所述背散射射线,所述第二背散射探测器阵列以第二射线接收角度接收所述背散射射线,所述第一背散射探测器阵列和所述第二背散射探测器阵列在所述第一传送机构的传送方向上错位布置,所述第一射线接收角度和所述第二射线接收角度之间存在角度差异,所述角度差异所在的角平面、以及所述空间深度方向垂直于所述第一背散射探测器阵列和所述第二背散射探测器阵列的阵列平面,并且,所述空间深度方向平行于所述角平面;所述处理器组件被具体配置为:基于所述可疑藏匿封装体在所述背散射图像中的图像位置信息,确定所述可疑藏匿封装体在所述第一背散射探测器阵列和/或所述第二背散射探测器阵列的定位参考方向上的成像位置,其中,所述定位参考方向平行于所述角平面与所述第一背散射探测器阵列和所述第二背散射探测器阵列的阵列平面的交线;基于所述成像位置、以及预先设定的位置转换参数,确定所述横向定位位置和所述深度定位位置,其中,所述位置转换参数与所述角度差异关联。
在一些示例中,可选地,所述第一背散射探测器阵列和所述第二背散射探测器阵列的阵列平面相互平行、且同向平齐,所述空间深度方向垂直于所述第一背散射探测器阵列和所述第二背散射探测器阵列的阵列平面,并且,所述定位参考方向包括所述第一背散射探测器阵列和所述第二背散射探测器阵列的行列方向中平行于所述角平面的方向;所述位置转换参数包括:所述定位参考方向上的任意坐标位置与所述可疑藏匿封装体的空间位置在所述角平面内的投影位置之间的平面几何关系,并且,所述平面几何关系与所述第一射线接收角度和所述第二射线接收角度关联;所述处理器组件被具体配置为:基于所述图像位置信息,确定所述第一背散射探测器阵列和所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的目标探测器在所述定位参考方向上的阵列坐标位置,所述阵列坐标位置用于表征所述成像位置;基于所述阵列坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述第一背散射探测器阵列和所述第二背散射探测器阵列的行方向均平行于所述通道宽度方向,所述定位参考方向包括所述第一背散射探测器阵列和所述第二背散射探测器阵列的行方向,并且,所述阵列坐标位置包括:所述第一背散射探测器阵列中对所述可疑藏匿封装体成像的第一目标探测器的第一行坐标位置,以及,所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的第二目标探测器的第二行坐标位置;所述处理器组件被具体配置为:基于所述第一行坐标位置和所述第二行坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述平面几何关系包括:所述角平面内的虚拟三角形的底高转换关系,所述虚拟三角形具有平行于所述定位参考方向的底边、以及与所述底边相对的顶点,所述底边的两侧底角分别与所述第一射线接收角度和所述第二射线接收角度的角度值关联,所述顶点用于表征所述可疑藏匿封装体在所述角平面内的投影位置,并且,所述底高转换关系用于表征所述底边的边长与所述顶点相对于所述底边的高之间的尺寸关系;所述处理器组件被具体配置为:基于所述第一行坐标位置和所述第二行坐标位置之间的位置差,确定所述底边的边长;基于所述底边的边长和所述尺寸关系,确定所述虚拟三角形的所述顶点相对于所述底边的高;基于所述顶点相对于所述底边的高,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述第一背散射探测器阵列和所述第二背散射探测器阵列的阵列平面相对倾斜,所述第二背散射探测器阵列为面阵阵列,并且,所述定位参考方向包括所述第一背散射探测器阵列或所述第二背散射探测器阵列的行列方向中相对于所述空间深度方向倾斜的其中一个方向;所述位置转换参数包括:所述定位参考方向上的任意坐标位置与所述空间深度方向上的标定位置之间的位置映射关系,所述位置映射关系与所述第二射线接收角度关联;所述处理器组件被具体配置为:基于所述图像位置信息,确定所述第一背散射探测器阵列和所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的目标探测器的阵列坐标位置,其中,所述阵列坐标位置用于表征所述成像位置,并且,所述阵列坐标位置包括所述第一背散射探测器阵列中对所述可疑藏匿封装体成像的第一目标探测器在垂直于所述定位参考方向的方向上的第一阵列坐标位置,以及,所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的第二目标探测器在所述定位参考方向上的第二阵列坐标位置;基于所述第一阵列坐标位置,确定所述横向定位位置;基于所述位置映射关系,将与所述第二阵列坐标位置对应的所述标定位置,确定为所述深度定位位置。
在一些示例中,可选地,所述第二背散射探测器阵列的阵列平面绕所述通道宽度方向相对于所述空间深度方向倾斜,所述第二背散射探测器阵列的阵列平面相对于所述空间深度方向的倾斜角度与所述第二射线接收角度关联,所述角平面与所述第二背散射探测器阵列的阵列平面的交线平行于所述第二背散射探测器阵列的列方向,所述第二背散射探测器阵列的行方向平行于所述通道宽度方向,所述定位参考方向为所述第二背散射探测器阵列的列方向,所述第一阵列坐标位置包括所述第一背散射探测器阵列中对所述可疑藏匿封装体成像的第一目标探测器的行坐标位置,并且,所述第二阵列坐标位置包括:所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的第二目标探测器的列坐标位置;所述处理器组件被具体配置为:基于所述位置映射关系,将所述空间深度方向上与所述列坐标位置对应的所述标定位置确定为所述深度定位位置。
在一些示例中,可选地,所述第一透射射线包括双能透射射线,所述透射图像包括高能透射图像和低能透射图像,所述处理器组件被具体配置为:基于所述高能透射图像和所述低能透射图像,确定所述被检对象的内部物质的原子序数;并且,基于所述被检对象的内部物质的原子序数,识别所述目标物质,其中,所述目标物质的原子序数低于预设的原子序数阈值。
在一些示例中,可选地,所述处理器组件被具体配置为:基于所述衍射能量谱数据与衍射能量谱样本的相似度,确定对所述可疑藏匿封装体中是否藏匿有所述目标物质。
在一些示例中,可选地,所述处理器组件进一步用于:响应于对所述目标物质的成功识别,产生第一报警信号。
在一些示例中,可选地,所述处理器组件进一步用于:响应于表示所述可疑藏匿封装体中藏匿有所述目标物质的检测结果,产生第二报警信号。
在本申请的另一个实施例中,一种基于透射射线的检测方法包括:
利用基于背散射成像数据生成的背散射图像,筛查被第一传送机构传送的被检对象中是否包括可疑藏匿封装体,其中,所述第一传送机构用于传送所述被检对象途经成像检测通道,所述成像检测通道部署有用于产生第一透射射线的第一射线源、以及背散射探测器阵列,并且,所述背散射探测器阵列用于基于所述第一透射射线在所述被检对象形成的背散射射线生成所述背散射成像数据;
响应于对所述可疑藏匿封装体的成功筛查,将被所述第一传送机构传送出所述成像检测通道的所述被检对象转移至第二传送机构,以促使所述被检对象被所述第二传送机构送达衍射检测通道,所述衍射检测通道部署有用于产生第二透射射线的第二射线源、以及衍射检测组件,所述衍射检测组件用于基于所述第二透射射线穿透所述被检对象产生的衍射射线生成衍射能量谱数据;
基于在所述被检对象位于所述衍射检测通道的期间内生成的衍射能量谱数据,确定所述可疑藏匿封装体中是否藏匿有所述目标物质。
在一些示例中,可选地,所述成像检测通道还部署有透射探测器阵列,所述透射探测器阵列用于基于所述第一透射射线穿透所述被检对象后的透射衰减射线产生透射成像数据;还包括:在基于所述透射成像数据生成的透射图像中,识别所述被检对象中的所述目标物质;所述利用基于背散射成像数据生成的背散射图像,筛查被第一传送机构传送的被检对象中是否包括可疑藏匿封装体,包括:利用所述背散射图像,筛查所述被检对象中除所述目标物质之外的非目标物质是否包括可疑藏匿封装体。
在一些示例中,可选地,所述第一透射射线包括双能透射射线,所述透射图像包括高能透射图像和低能透射图像,所述在基于透射成像数据生成的透射图像中,识别被第一传送机构传送的被检对象中的目标物质,包括:基于所述高能透射图像和所述低能透射图像,确定所述被检对象的内部物质的原子序数;并且,基于所述被检对象的内部物质的原子序数,识别所述目标物质,其中,所述目标物质的原子序数低于预设的原子序数阈值。
在一些示例中,可选地,所述利用基于所述背散射成像数据生成的背散射图像,筛查所述被检对象中除所述目标物质之外的非目标物质是否包括可疑藏匿封装体,包括:在所述背散图像中检测用于表征所述可疑藏匿封装体的高亮像素区域,所述高亮像素区域中的各像素的像素值均高于预设像素阈值。
在一些示例中,可选地,所述基于在所述被检对象位于所述衍射检测通道的期间内生成的衍射能量谱数据,确定所述可疑藏匿封装体中是否藏匿有所述目标物质,包括:基于所述衍射能量谱数据与衍射能量谱样本的相似度,确定对所述可疑藏匿封装体中是否藏匿有所述目标物质的衍射检测的检测结果。
在一些示例中,可选地,所述在所述背散图像中检测用于表征所述可疑藏匿封装体的高亮像素区域,包括:基于对所述背散射图像的尺度转换,生成所述透射图像具有适配尺度的适配背散射;确定所述目标物质在所述透射图像中的目标识别区域,在所述适配背散射图像中位置匹配的像素映射区域,并且将所述适配背散射图像中的所述像素映射区域的像素值置零;基于对所述适配背散射图像中的非零像素的轮廓检测,得到对所述被检对象的内部物质,在所述适配背散射图像中的轮廓位置区域;基于所述轮廓位置区域,对所述背散射图像进行区域分割;在所述背散射图像中通过所述区域分割得到的各像素区域中,搜索所述高亮像素区域。
在一些示例中,可选地,还包括:响应于对所述可疑藏匿封装体的成功筛查,以所述可疑藏匿封装体在所述第一传送机构的扫描传送方向上的扫描识别位置为起始位置,对所述可疑藏匿封装体进行位置跟踪,所述位置跟踪与所述第一传送机构的第一传送速率、以及所述第二传送机构的第二传送速率关联;基于对所述可疑藏匿封装体的位置跟踪结果,确定所述可疑藏匿封装体到达所述衍射检测通道。
在一些示例中,可选地,所述第二透射射线沿垂直于所述第二传送机构的送检传送方向的线性方向分布;所述基于对所述可疑藏匿封装体的位置跟踪结果,确定所述可疑藏匿封装体到达所述衍射检测通道,包括:当所述位置跟踪结果与所述线性覆盖范围位置匹配时,确定所述可疑藏匿封装体到达所述衍射检测通道。
在一些示例中,可选地,还包括:基于所述可疑藏匿封装体的图像位置信息,确定所述可疑藏匿封装体在所述成像检测通道的通道宽度方向上的横向定位位置、以及空间深度方向上的深度定位位置,其中,所述通道宽度方向垂直于所述第一传送机构的扫描传送方向,并且,所述扫描传送方向和所述通道宽度方向平行于所述第一传送机构的承载平面,所述空间深度方向垂直于所述第一传送机构的承载平面;基于所述横向定位位置和所述深度定位位置,确定所述衍射检测组件在所述可疑藏匿封装体位于所述衍射检测通道的期间内对衍射射线的射线接收位置。
在一些示例中,可选地,所述衍射检测组件可移动地装设在所述衍射检测通道内,所述第二透射射线的准直方向垂直于所述第二传送机构的承载平面,所述第二透射射线沿垂直于所述第二传送机构的送检传送方向的线性方向分布,并且,所述衍射检测组件在所述衍射检测通道内的移动方向平行于所述线性方向;所述衍射检测组件包括至少两个检测单元,至少两个所述检测单元的单元检测范围沿所述第二透射射线的准直方向交错排布,并且,至少两个所述检测单元分别用于基于在所述第二透射射线的准直方向上的不同位置区域接收到的所述衍射射线生成所述衍射能量谱数据;所述基于所述横向定位位置和所述深度定位位置,确定所述衍射检测组件在所述可疑藏匿封装体位于所述衍射检测通道的期间内对衍射射线的射线接收位置,包括:基于所述横向定位位置,确定所述衍射检测组件在所述线性方向上的目标偏移位置;基于所述深度定位位置,确定在所述第二透射射线的准直方向上的目标位置区域,以促使在所述目标位置区域接收所述衍射射线的所述检测单元被选通;其中,所述目标偏移位置和所述目标位置区域用于表征所述射线接收位置。
在一些示例中,可选地,所述背散射探测器阵列以第一射线接收角度接收所述背散射射线,所述透射探测器阵列以第二射线接收角度接收所述透射衰减射线,所述第一射线接收角度和所述第二射线接收角度之间存在角度差异,所述角度差异所在的角平面、以及所述空间深度方向垂直于所述背散射探测器阵列和所述透射探测器阵列的阵列平面,并且,所述空间深度方向平行于所述角平面;所述基于所述可疑藏匿封装体的图像位置信息,确定所述可疑藏匿封装体在所述成像检测通道的通道宽度方向上的横向定位位置、以及空间深度方向上的深度定位位置,包括:基于所述可疑藏匿封装体在所述背散射图像和所述透射图像中的图像位置信息,确定所述可疑藏匿封装体在所述透射探测器阵列和所述背散射探测器阵列的定位参考方向上的成像位置,其中,所述定位参考方向平行于所述角平面与所述背散射探测器阵列和所述透射探测器阵列的阵列平面的交线;基于所述成像位置、以及预先设定的位置转换参数,确定所述横向定位位置和所述深度定位位置,其中,所述位置转换参数与所述角度差异关联。
在一些示例中,可选地,所述背散射探测器阵列和所述透射探测器阵列的阵列平面相互平行,所述空间深度方向垂直于所述背散射探测器阵列和所述透射探测器阵列的阵列平面,并且,所述定位参考方向包括所述背散射探测器阵列和所述透射探测器阵列的行列方向中平行于所述角平面的其中一个方向;所述位置转换参数包括:所述定位参考方向上的任意坐标位置与所述可疑藏匿封装体的空间位置在所述角平面内的投影位置之间的平面几何关系,所述平面几何关系与所述第一射线接收角度和所述第二射线接收角度关联;所述基于所述可疑藏匿封装体在所述背散射图像和所述透射图像中的图像位置信息,确定所述可疑藏匿封装体在所述透射探测器阵列和所述背散射探测器阵列的定位参考方向上的成像位置,包括:基于所述图像位置信息,确定所述背散射探测器阵列和所述透射探测器阵列中对所述可疑藏匿封装体成像的目标探测器在所述定位参考方向上的阵列坐标位置,所述阵列坐标位置用于表征所述成像位置;所述基于所述成像位置、以及预先设定的位置转换参数,确定所述横向定位位置和所述深度定位位置,包括:基于所述阵列坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述背散射探测器阵列和所述透射探测器阵列的行方向均平行于所述通道宽度方向,所述定位参考方向包括所述背散射探测器阵列和所述透射探测器阵列的行方向,并且,所述阵列坐标位置包括:所述背散射探测器阵列中对所述可疑藏匿封装体成像的第一目标探测器的第一行坐标位置,以及,所述透射探测器阵列中对所述可疑藏匿封装体成像的第二目标探测器的第二行坐标位置;所述基于所述阵列坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置,包括:基于所述第一行坐标位置和所述第二行坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述平面几何关系包括:所述角平面内的虚拟三角形的底高转换关系,所述虚拟三角形具有平行于所述定位参考方向的底边、以及与所述底边相对的顶点,所述底边的两侧底角分别与所述第一射线接收角度和所述第二射线接收角度的角度值关联,所述顶点用于表征所述可疑藏匿封装体在所述角平面内的投影位置,并且,所述底高转换关系用于表征所述底边的边长与所述顶点相对于所述底边的高之间的尺寸关系;所述基于所述第一行坐标位置和所述第二行坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置,包括:基于所述第二行坐标位置,确定所述虚拟三角形与所述第二射线接收角度关联的一侧底角的目标角度值,所述第二射线接收角度包括在所述透射探测器阵列的行方向上的多个探测器处分别对应的不同角度值,并且,所述目标角度值与所述第二射线接收角度在所述第二目标探测器处对应的角度值关联;基于所述第一行坐标位置相比于参考行坐标位置的位置偏移量,确定所述底边在所述虚拟三角形与所述第二射线接收角度关联的一侧底角为所述目标角度值时的边长,其中,所述参考行坐标位置为所述第一射线源沿所述空间深度方向在所述背散射探测器阵列的投影位置;基于所述底边的边长和所述尺寸关系,确定所述虚拟三角形的所述顶点相对于所述底边的高;基于所述顶点相对于所述底边的高,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述背散射探测器阵列包括第一背散射探测器阵列和第二背散射探测器阵列,所述第一背散射探测器阵列以第一射线接收角度接收所述背散射射线,所述第二背散射探测器阵列以第二射线接收角度接收所述背散射射线,所述第一背散射探测器阵列和所述第二背散射探测器阵列在所述第一传送机构的传送方向上错位布置,所述第一射线接收角度和所述第二射线接收角度之间存在角度差异,所述角度差异所在的角平面、以及所述空间深度方向垂直于所述第一背散射探测器阵列和所述透射探测器阵列的阵列平面,并且,所述空间深度方向平行于所述角平面;所述基于所述可疑藏匿封装体的图像位置信息,确定所述可疑藏匿封装体在所述成像检测通道的通道宽度方向上的横向定位位置、以及空间深度方向上的深度定位位置,包括:基于所述可疑藏匿封装体在所述背散射图像中的图像位置信息,确定所述可疑藏匿封装体在所述第一背散射探测器阵列和/或所述第二背散射探测器阵列的定位参考方向上的成像位置,其中,所述定位参考方向平行于所述角平面与所述第一背散射探测器阵列和所述透射探测器阵列的阵列平面的交线;基于所述成像位置、以及预先设定的位置转换参数,确定所述横向定位位置和所述深度定位位置,其中,所述位置转换参数与所述角度差异关联。
在一些示例中,可选地,所述第一背散射探测器阵列和所述第二背散射探测器阵列的阵列平面相互平行、且同向平齐,所述空间深度方向垂直于所述第一背散射探测器阵列和所述第二背散射探测器阵列的阵列平面,并且,所述定位参考方向包括所述第一背散射探测器阵列和所述第二背散射探测器阵列的行列方向中平行于所述角平面的方向;所述位置转换参数包括:所述定位参考方向上的任意坐标位置与所述可疑藏匿封装体的空间位置在所述角平面内的投影位置之间的平面几何关系,并且,所述平面几何关系与所述第一射线接收角度和所述第二射线接收角度关联;所述基于所述可疑藏匿封装体在所述背散射图像中的图像位置信息,确定所述可疑藏匿封装体在所述第一背散射探测器阵列和所述第二背散射探测器阵列的定位参考方向上的成像位置,包括:基于所述图像位置信息,确定所述第一背散射探测器阵列和所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的目标探测器在所述定位参考方向上的阵列坐标位置,所述阵列坐标位置用于表征所述成像位置;所述基于所述成像位置、以及预先设定的位置转换参数,确定所述横向定位位置和所述深度定位位置,包括:基于所述阵列坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述第一背散射探测器阵列和所述第二背散射探测器阵列的行方向均平行于所述通道宽度方向,所述定位参考方向包括所述第一背散射探测器阵列和所述第二背散射探测器阵列的行方向,并且,所述阵列坐标位置包括:所述第一背散射探测器阵列中对所述可疑藏匿封装体成像的第一目标探测器的第一行坐标位置,以及,所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的第二目标探测器的第二行坐标位置;所述基于所述阵列坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置,包括:基于所述第一行坐标位置和所述第二行坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述平面几何关系包括:所述角平面内的虚拟三角形的底高转换关系,所述虚拟三角形具有平行于所述定位参考方向的底边、以及与所述底边相对的顶点,所述底边的两侧底角分别与所述第一射线接收角度和所述第二射线接收角度的角度值关联,所述顶点用于表征所述可疑藏匿封装体在所述角平面内的投影位置,并且,所述底高转换关系用于表征所述底边的边长与所述顶点相对于所述底边的高之间的尺寸关系;所述基于所述第一行坐标位置和所述第二行坐标位置、以及所述平面几何关系,确定所述横向定位位置和所述深度定位位置,包括:基于所述第一行坐标位置和所述第二行坐标位置之间的位置差,确定所述底边的边长;基于所述底边的边长和所述尺寸关系,确定所述虚拟三角形的所述顶点相对于所述底边的高;基于所述顶点相对于所述底边的高,确定所述横向定位位置和所述深度定位位置。
在一些示例中,可选地,所述第一背散射探测器阵列和所述第二背散射探测器阵列的阵列平面相对倾斜,所述第二背散射探测器阵列为面阵阵列,并且,所述定位参考方向包括所述第一背散射探测器阵列或所述第二背散射探测器阵列的行列方向中相对于所述空间深度方向倾斜的其中一个方向;所述位置转换参数包括:所述定位参考方向上的任意坐标位置与所述空间深度方向上的标定位置之间的位置映射关系,所述位置映射关系与所述第二射线接收角度关联;所述基于所述可疑藏匿封装体在所述背散射图像中的图像位置信息,确定所述可疑藏匿封装体在所述第一背散射探测器阵列和/或所述第二背散射探测器阵列的定位参考方向上的成像位置,包括:基于所述图像位置信息,确定所述第一背散射探测器阵列和所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的目标探测器的阵列坐标位置,其中,所述阵列坐标位置用于表征所述成像位置,并且,所述阵列坐标位置包括所述第一背散射探测器阵列中对所述可疑藏匿封装体成像的第一目标探测器在垂直于所述定位参考方向的方向上的第一阵列坐标位置,以及,所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的第二目标探测器在所述定位参考方向上的第二阵列坐标位置;基于所述第一阵列坐标位置,确定所述横向定位位置;基于所述位置映射关系,将与所述第二阵列坐标位置对应的所述标定位置,确定为所述深度定位位置。
在一些示例中,可选地,所述第二背散射探测器阵列的阵列平面绕所述通道宽度方向相对于所述空间深度方向倾斜,所述第二背散射探测器阵列的阵列平面相对于所述空间深度方向的倾斜角度与所述第二射线接收角度关联,所述角平面与所述第二背散射探测器阵列的阵列平面的交线平行于所述第二背散射探测器阵列的列方向,所述第二背散射探测器阵列的行方向平行于所述通道宽度方向,所述定位参考方向为所述第二背散射探测器阵列的列方向,所述第一阵列坐标位置包括所述第一背散射探测器阵列中对所述可疑藏匿封装体成像的第一目标探测器的行坐标位置,并且,所述第二阵列坐标位置包括:所述第二背散射探测器阵列中对所述可疑藏匿封装体成像的第二目标探测器的列坐标位置;所述处理器组件被具体配置为:基于所述位置映射关系,将所述空间深度方向上与所述列坐标位置对应的所述标定位置确定为所述深度定位位置。
在一些示例中,可选地,还包括:响应于对所述目标物质的成功识别,产生第一报警信号。
在一些示例中,可选地,还包括:响应于表示所述可疑藏匿封装体中藏匿有所述目标物质的检测结果,产生第二报警信号。
在本申请的另一个实施例中,一种基于透射射线的检测装置包括:
藏匿筛查模块,用于利用基于所述背散射成像数据生成的背散射图像,筛查被第一传送机构传送的被检对象中是否包括可疑藏匿封装体,其中,所述第一传送机构用于传送所述被检对象途经成像检测通道,所述成像检测通道部署有用于产生第一透射射线的第一射线源、以及背散射探测器阵列,并且,所述背散射探测器阵列用于基于所述第一透射射线在所述被检对象形成的背散射射线生成所述背散射成像数据;
补检触发模块,用于响应于对所述可疑藏匿封装体的成功筛查,将被所述第一传送机构传送出所述成像检测通道的所述被检对象转移至第二传送机构,以促使所述被检对象被所述第二传送机构送达衍射检测通道,所述衍射检测通道部署有用于产生第二透射射线的第二射线源、以及衍射检测组件,所述衍射检测组件用于基于所述第二透射射线穿透所述被检对象产生的衍射射线生成衍射能量谱数据;
藏匿确定模块,用于基于在所述被检对象位于所述衍射检测通道的期间内生成的衍射能量谱数据,确定所述可疑藏匿封装体中是否藏匿有所述目标物质。
在一些示例中,可选地,所述成像检测通道还部署有透射探测器阵列,所述透射探测器阵列用于基于所述第一透射射线穿透所述被检对象后的透射衰减射线产生透射成像数据;还包括:目标识别模块,用于在基于所述透射成像数据生成的透射图像中,识别所述被检对象中的所述目标物质;所述藏匿筛查模块被具体配置为:利用所述背散射图像,筛查所述被检对象中除所述目标物质之外的非目标物质是否包括可疑藏匿封装体。
在一些示例中,可选地,所述第一透射射线包括双能透射射线,所述透射图像包括高能透射图像和低能透射图像,所述目标识别模块被具体配置为:基于所述高能透射图像和所述低能透射图像,确定所述被检对象的内部物质的原子序数;并且,基于所述被检对象的内部物质的原子序数,识别所述目标物质,其中,所述目标物质的原子序数低于预设的原子序数阈值。
在一些示例中,可选地,所述藏匿筛查模块被具体配置为:在所述背散图像中检测高亮像素区域,所述高亮像素区域中的各像素的像素值均高于预设像素阈值。
在一些示例中,可选地,所述藏匿确定模块被具体配置为:基于所述衍射能量谱数据与衍射能量谱样本的相似度,确定对所述可疑藏匿封装体中是否藏匿有所述目标物质的衍射检测的检测结果。
在一些示例中,可选地,还包括位置跟踪模块,用于响应于对所述可疑藏匿封装体的成功筛查,以所述可疑藏匿封装体在所述第一传送机构的扫描传送方向上的扫描识别位置为起始位置,对所述可疑藏匿封装体进行位置跟踪,所述位置跟踪与所述第一传送机构的第一传送速率、以及所述第二传送机构的第二传送速率关联;基于对所述可疑藏匿封装体的位置跟踪结果,确定所述可疑藏匿封装体到达所述衍射检测通道。
在一些示例中,可选地,还包括空间定位模块,用于基于所述可疑藏匿封装体的图像位置信息,确定所述可疑藏匿封装体在所述成像检测通道的通道宽度方向上的横向定位位置、以及空间深度方向上的深度定位位置,其中,所述通道宽度方向垂直于所述第一传送机构的扫描传送方向,并且,所述扫描传送方向和所述通道宽度方向平行于所述第一传送机构的承载平面,所述空间深度方向垂直于所述第一传送机构的承载平面;基于所述横向定位位置和所述深度定位位置,确定所述衍射检测组件在所述可疑藏匿封装体位于所述衍射检测通道的期间内对衍射射线的射线接收位置。
在本申请的另一个实施例中,一种非瞬时计算机可读存储介质,其中存储指令,所述指令在由处理器执行时使得所述处理器执行前述实施例所述的检测方法。
基于上述实施例,可以在成像检测通道中对被检对象进行背散射成像,利用背散射图像对目标物质具有“高亮效果”的特性,可以对被检对象进行对可疑藏匿封装体的筛查;如若筛查出被检对象的内部具有可疑藏匿封装体,则,还可以将该被检对象从途经成像检测通道的第一传送机构转移至途经衍射检测通道的第二传送机构,以便于在衍射检测通道对该可疑藏匿封装体进行用于确定其是否藏匿目标物质的衍射检测,并且可以避免衍射检测的耗时与第一传送机构的实时传送需求之间的冲突,从而,有助于在兼顾实时传送需求的情况下避免对藏匿的目标物质的漏检。
附图说明
以下附图仅对本申请做示意性说明和解释,并不限定本申请的范围:
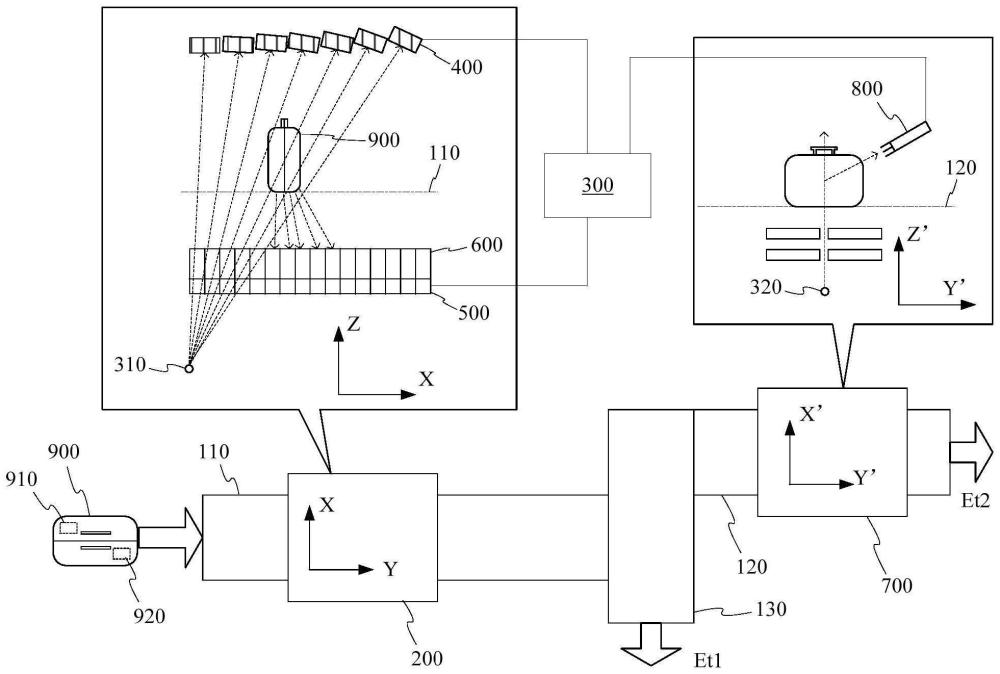
图1为本申请的一个实施例中基于透射射线的检测系统的结构示意图;
图2为如图1所示的检测系统中的衍射检测通道内的部署结构示意图;
图3为如图1所示的检测系统的第一定位实例的原理示意图;
图4为如图1所示的检测系统的第二定位实例的原理示意图;
图5为如图1所示的检测系统的第三定位实例的原理示意图;
图6为本申请的实施例中基于透射射线的检测方法的流程示意图;
图7为如图6所示的检测方法的扩展流程示意图;
图8为本申请的实施例中基于透射射线的检测装置的结构示意图;
图9为如图8所示的检测装置的扩展结构示意图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下参照附图并举实施例,对本申请作进一步详细说明。
本申请的实施例可以引入背散射成像和衍射检测,其中:
由于诸如危险物质等低原子序数的有机物能够引发较强的背散射,因此,背散射图像对目标物质具有“高亮效果”的特性,从而,利用背散射图像的该特性可以筛查疑似藏匿有目标物质的可疑藏匿封装体,本申请实施例中提及的目标物质可以是诸如危险物质等低原子序数的有机物;
衍射检测对可疑藏匿封装体中是否藏匿目标物质的检测结果,比背散射图像对目标物质的“高亮效果”更准确,因此,衍射检测可以确定利用背散射图像的上述特性筛查出的可疑藏匿封装体中是否藏匿有目标物质。
而且,在本申请的实施例中,对疑似藏匿有目标物质的可疑藏匿封装体的筛查可以是独立的检测过程,或者,也可以作为对目标物质识别之后的补检。
若对可疑藏匿封装体的筛查作为对目标物质识别之后的补检,则,本申请的实施例仍可以采用透射成像来识别实时传送的被检对象中的目标物质,在此情况下,背散射成像可以与透射成像同步进行,并且,考虑到衍射检测的耗时会长于透射成像和背散射成像的耗时,因此,需要被衍射检测的被检对象可以从实时传送的路径中转移至旁支支路,以避免影响该路径中的传送流畅性,即,衍射检测与透射成像和背散射成像异步。
图1为本申请的一个实施例中基于透射射线的检测系统的结构示意图。请参见图1,在本申请的实施例中,基于透射射线的检测系统包括可以包括第一传送机构110、成像检测通道200、第二传送机构120衍射检测通道700、以及处理器组件300。
第一传送机构110和第二传送机构120均可以承载被检对象900,第一传送机构110可以途经成像检测通道200,并且,第二传送机构120可以途经衍射检测通道700。
例如,第一传送机构110和第二传送机构120中的任意一个可以包括传送带或排辊,传送带或排辊的顶面可以形成用于第一传送机构110承载被检对象900的承载平面XY、或用于第二传送机构120承载被检对象900的承载平面X’Y’。其中,X表示成像检测通道200的通道宽度方向,Y表示第一传送机构110的传送方向(即成像检测通道200的通道长度方向),X’表示衍射检测通道700的通道宽度方向,Y’表示第二传送机构110的传送方向(即衍射检测通道700的通道长度方向),并且,第一传送机构110的扫描传送方向Y和第二传送机构120的送检传送方向Y’可以根据成像检测通道200和衍射检测通道700之间的相对位姿关系确定,二者可以是相互平行的,或者,也可以是相对倾斜的,本申请的实施例中对此不作限制。
第一传送机构110为检测系统中需要保持持续实时传送的主传送路径,即,第一传送机构110需要支持多个不同的被检对象连续穿过成像检测通道200的流畅性。第二传送机构120是检测系统中的分支传送路径,该分支传送路径对于实时传送的需求可以低于主传送路径,并且,第二传送机构120可以在成像检测通道200与第一传送机构110的第一出口Et1之间与第一传送机构110接驳,并且,第二传送机构120的末端可以布置有第二出口Et2。在本申请实施例的图1中,以第一传送机构110和第二传送机构120可以通过传送接驳机构130接驳为例进行图示表达,该传送接驳机构130用于选择性地将从成像检测通道200传出的被检对象900送至第一出口Et1或第二传送结构120.例如,该传送接驳结构130可以包括传送带或排辊,或者,该传送接驳机构130也可以包括诸如机械手臂或分拣设备等动作执行设备。
处理器组件300可以用于控制第一传送机构110和第二传送机构120、以及二者之间的传送接驳机构130。例如,处理器组件300可以包括CPU(central processing unit,中央处理单元)、诸如FPGA(Field-Programmable Gate Array,现场可编程门阵列)等逻辑器件、GPU(Graphics Processing Unit,图形处理单元)、以及AI(Artificial Intelligence,人工智能)处理单元中的至少一种处理器件。并且,处理器组件300与第一传送机构110、第二传送机构120以及传送接驳机构130之间的通信连接可以包括有线通信连接和无线通信连接中的至少一种。
在本申请的实施例中,以对可疑藏匿封装体的筛查作为对目标物质识别之后的补检为例,成像检测通道200中部署有用于产生第一透射射线的第一射线源310、以及透射探测器阵列400和背散射探测器阵列500。其中,透射探测器阵列400和第一射线源310在与承载平面XY相交(例如垂直于承载平面XY)的空间深度方向Z上可以分别部署在承载平面XY的相反侧,因此,透射探测器阵列400可以用于基于第一透射射线穿透被检对象900后的透射衰减射线产生透射成像数据;并且,背散射探测器阵列500和第一射线源310在垂直于承载平面XY的空间深度方向Z上可以分别部署在承载平面XY的同侧,因此,背散射探测器阵列500可以用于基于第一透射射线在被检对象900形成的背散射射线生成背散射成像数据。另外,成像检测通风道200可以具有含铅罩壳,第一射线源310、以及透射探测器阵列400和背散射探测器阵列500均部署在成像检测通风道200的含铅罩壳的罩壳空间内。
处理器组件300可以用于控制第一射线源310,并且,获取透射探测器阵列400产生的透射成像数据、以及背散射探测器阵列500产生的背散射成像数据。处理器组件300与第一射线源310、以及透射探测器阵列400和背散射探测器阵列500之间的通信连接可以包括有线通信连接和无线通信连接中的至少一种。
处理器组件300还可以用于基于透射成像数据生成透射图像,并且,基于背散射成像数据生成背散射图像。其中,透射图像可以是经伪彩处理(pseudocoloring)后的彩色图像,并且,背散射图像可以是灰度图像。
例如,若透射探测器阵列400为线阵阵列,则透射探测器阵列400的成像过程可以看作是在被检对象900沿第一传送机构110的扫描传送方向Y移动过程中对被检对象900的线扫描过程,在此情况下,透射成像数据中的单帧图像可以为线扫描条形图,并且,基于透射成像数据生成的每一帧第一检测图像可以是由在预设时间窗内的多帧线扫描条形图拼接得到。若透射探测器阵列400为面阵阵列,则透射探测器阵列400的成像过程可以是单帧抓拍过程,在此情况下,透射成像数据中的单帧图像可以为二维图像,并且,基于透射成像数据生成的每一帧透射图像可以包括在预设时间窗内的至少一帧二维图像。
同理,背散射探测器阵列500也可以为线阵阵列或面阵阵列,并且,背散射成像数据和背散射图像的不同情况可以与透射成像数据和透射图像基本相同,此处不再赘述。
处理器组件300还可以用于在基于透射成像数据生成的透射图像中,识别被检对象900中的目标物质910。
在本申请的实施例中,对目标物质910的识别可以基于与原子序数关联的任意一种目标识别算法来实现。例如,若第一透射射线包括双能透射射线,则,透射成像数据可以包括高能透射成像数据和低能成像数据,并且,透射图像包括高能透射图像和低能透射图像,在此情况下,处理器组件300可以被具体配置为:基于高能透射图像和低能透射图像,确定被检对象900的内部物质的原子序数;并且,基于被检对象900的内部物质的原子序数,识别被检对象900内部的目标物质910,其中,目标物质910的原子序数低于预设的原子序数阈值(例如18)。并且,处理器组件300确定的原子序数可以由与原子序数关联的R值来表征,并且,处理器组件300可以基于确定的R值、以及预设的双能R值曲线,识别被检对象900中的内部物质是否为目标物质910。
优选地,若处理器组件300识别到一个或多个目标物质910,则,处理器组件300可以进一步用于:响应于对目标物质910的成功识别,产生第一报警信号。
无论处理器组件300是否识别到目标物质910,该处理器组件300还可以用于利用基于背散射成像数据生成的背散射图像,筛查被检对象900中除目标物质910之外的非目标物质(例如原子序数高于原子序数阈值的无机物质)是否包括可疑藏匿封装体920,该可疑藏匿封装体920是指疑似藏匿有目标物质910的非目标物质。
如前文所述,背散射图像对目标物质920具有“高亮效果”的特性,因此,处理器组件300可以通过在背散图像中检测用于表征可疑藏匿封装体的高亮像素区域,筛查被检对象900中除目标物质910之外的非目标物质(例如原子序数高于原子序数阈值的无机物质)是否包括可疑藏匿封装体920,该高亮像素区域中的各像素的像素值均高于预设像素阈值。
例如,处理器组件300检测高亮像素区域的检测过程可以具体包括:
基于对背散射图像的尺度转换,生成与透射图像具有适配尺度的适配背散射图像,其中,对背散射图像的尺度转换可以包括诸如几何配准和图像缩放等图像处理;
确定透射图像中表征目标物质910的目标识别区域,在适配背散射图像中位置匹配的像素映射区域;
将适配背散射图像中适配背散射图像中的像素值置零,并且,适配背散射图像中包括非零像素的区域用于表征非目标物质(例如原子序数高于原子序数阈值的无机物质);
基于对适配背散射图像中的非零像素的轮廓检测,得到对被检对象900的内部物质(即诸如原子序数高于原子序数阈值的无机物质等非目标物质)在适配背散射图像中的轮廓位置区域;
基于在适配背散射图像中检测到的轮廓位置区域,对背散射图像进行区域分割,例如,对背散射图像的区域分割可以采用诸如距离正则化水平集算法等任意一种图像分割算法;
在背散射图像中通过区域分割得到的各像素区域中,搜索前文提及的用于表征可疑藏匿封装体的高亮像素区域,高亮像素区域可以被看作是背散射图像中的ROI(Regionof Interest,感兴趣区域)。
若处理器组件300未筛查出被检对象900内部存在可疑藏匿封装体920,则,处理器组件300可以通过控制传送接驳机构130,使该被检对象900被第一传送机构110从第一出口Et1送出。并且,检测人员可以根据处理器组件300对该被检对象900中是否存在未藏匿的目标物质910的识别结果(例如处理器组件300是否针对该被检对象900产生第一报警信号),确定是否需要对从第一出口Et1送出的该被检对象900实施管控措施。
若处理器组件300筛查出被检对象900的内部具有可疑藏匿封装体920,则,处理器组件300还可以用于响应于对可疑藏匿封装体920的成功筛查,即,背散射图像中存在至少一个ROI,将被第一传送机构110传送出成像检测通道200的被检对象900(即包含可疑藏匿封装体920的被检对象900)转移至第二传送机构120,以促使该被检对象920被第二传送机构120送达衍射检测通道920。
衍射检测通道700中部署有用于产生第二透射射线的第二射线源320、以及衍射检测组件800,该衍射检测组件800用于基于第二透射射线穿透被检对象900产生的衍射射线生成衍射能量谱数据。另外,衍射检测通道700可以具有含铅罩壳,第二射线源320和衍射检测组件800均部署在衍射检测通道700的含铅罩壳的罩壳空间内。
处理器组件300还可以用于:
基于衍射检测组件800在被检对象900位于衍射检测通道700的期间内生成的衍射能量谱数据,确定可疑藏匿封装体920中是否藏匿有目标物质。
例如,处理器组件300可以被具体配置为:基于被检对象900位于衍射检测通道700的期间内生成的衍射能量谱数据,与预先设定的衍射能量谱样本的相似度,确定对所述可疑藏匿封装体中是否藏匿有所述目标物质的衍射检测的检测结果。其中,预先设定的衍射能量谱样本为诸如原子序数高于原子序数阈值的无机物质等非目标物质样本在掺杂有目标物质样本时收集得到的,并且,衍射能量谱数据与衍射能量谱样本的相似度高于预设的相似度阈值,则表示可疑藏匿封装体920中藏匿有目标物质。
优选地,若确定可疑藏匿封装体920中藏匿有目标物质,则处理器组件300可以进一步用于:响应于表示可疑藏匿封装体920中藏匿有目标物质的检测结果,产生第二报警信号。
无论处理器组件300的衍射检测结果是否表示可疑藏匿封装体920中藏匿有目标物质,处理器组件300都可以控制第二传送机构120将包含该可疑藏匿封装体920的被检对象900从第二出口Et2送出。并且,检测人员可以根据处理器组件300对可疑藏匿封装体920的衍射检测结果(例如处理器组件300是否针对包含该可疑藏匿封装体920的被检对象900产生第二报警信号),确定是否需要对从第二出口Et2送出的被检对象900实施管控措施。
基于上述检测系统,可以在成像检测通道200中同时对被检对象进行透射成像和背散射成像,利用背散射图像对目标物质具有“高亮效果”的特性,可以对透射图像中未识别出目标物质的图像区域进行对可疑藏匿封装体920的筛查;如若筛查出被检对象900的内部具有可疑藏匿封装体920,则,还可以将该被检对象900从途经成像检测通道200的第一传送机构110转移至途经衍射检测通道700的第二传送机构120,以便于在衍射检测通道700对该可疑藏匿封装体920进行用于确定其是否藏匿目标物质的衍射检测,并且可以避免衍射检测的耗时与第一传送机构110的实时传送需求之间的冲突,从而,有助于在兼顾实时传送需求的情况下避免对藏匿的目标物质的漏检。
另外,为了提升在衍射检测通道700中的衍射检测效率,处理器组件300可以进一步用于确定可疑藏匿封装体920的空间位置,以便于在包含可疑藏匿封装体920的被检对象900到达衍射检测通道700后,快速启动对可疑藏匿封装体920的定位衍射检测。
在本申请的实施例中,处理器组件300确定的可疑藏匿封装体920的空间位置可以包括可疑藏匿封装体920在第一传送机构110的扫描传送方向上的扫描识别位Py、可疑藏匿封装体920在成像检测通道200的通道宽度方向X上的横向定位位置Px、以及空间深度方向Z上的深度定位位置Pz。
其中,扫描识别位Py可以用于确定可疑藏匿封装体920在衍射检测通道700的到达时刻,相应地,处理器组件300可以用于:
响应于对可疑藏匿封装体920的成功筛查,以可疑藏匿封装体920在第一传送机构110的扫描传送方向Y上的扫描识别位置Py为起始位置,对该可疑藏匿封装体920进行位置跟踪,对可疑藏匿封装体920的位置跟踪可以与第一传送机构110的第一传送速率、以及第二传送机构120的第二传送速率关联,并且,该位置跟踪还可以进一步使用从扫描识别位置Py到衍射检测通道700中的衍射检测位置处的传送路径长度等其他辅助参数;
基于对可疑藏匿封装体920的位置跟踪结果,确定可疑藏匿封装体920到达衍射检测通道700。
而且,横向定位位置Px和深度定位位置Pz可以用于确定衍射检测组件800对衍射射线的射线接收位置,相应地,处理器组件300可以用于:
基于可疑藏匿封装体920的图像位置信息,确定可疑藏匿封装体920在成像检测通道200的通道宽度方向X上的横向定位位置Px、以及空间深度方向Z上的深度定位位置Pz;
基于横向定位位置Px和深度定位位置Pz,确定衍射检测组件80在可疑藏匿封装体920位于衍射检测通道700的期间内对衍射射线的射线接收位置。
图2为如图1所示的检测系统中的衍射检测通道内的部署结构示意图。请参见图2,在本申请的实施例中,第二射线源320产生的第二透射射线在衍射检测通道700内沿垂直于第二传送机构120的送检传送方向Y’的线性方向分布,该线性方向平行于衍射检测通道700的通道宽度方向X’。
例如,第二射线源320可以包括多个,多个第二射线源320沿衍射检测通道700的通道宽度方向X’排列,每个第二射线源320产生的第二透射射线被准直为与第二传送机构120的承载平面X’Y’相交(例如垂直于承载平面X’Y’)的直线射线束,即,第二透射射线的准值方向Z’可以与第二传送机构120的承载平面X’Y’相交(例如垂直于承载平面X’Y’),从而,第二透射射线的多条直线射线束沿平行于衍射检测通道700的通道宽度方向X’排列,进而使得第二透射射线沿上述的线性方向分布。
在此情况下,处理器组件300可以被具体配置为:当位置跟踪结果与第二透射射线在第二传送机构120的送检传送方向Y’上的线性分布位置Y_dif(即前述的衍射检测位置)匹配时,确定可疑藏匿封装体920到达衍射检测通道700。
而且,第二射线源320可以只在可疑藏匿封装体920位于线性分布位置Y_dif(即前述的衍射检测位置)时被处理器组件300启动,并且,处理器组件300还可以通过控制第二传送机构120,使可疑藏匿封装体920在线性分布位置Y_dif(即前述的衍射检测位置)的驻停时长达到衍射检测组件800生成衍射能量谱数据所需的时长,并且,响应于可疑藏匿封装体920离开线性分布位置Y_dif(即前述的衍射检测位置)关闭第二射线源320。
对于可疑藏匿封装体920的扫描识别位置Py的确定,在本申请的实施例中可以采用不同的确定方式。
例如,处理器组件300可以基于可疑藏匿封装体920在背散图像中的图像位置信息,确定扫描识别位置Py。例如,该图像位置信息可以包括前文描述的背散射图像中的高亮像素区域的质心在与传送方向Y相对应的图像方向上的质心坐标位置,并且,基于背散射图像的图像坐标系与空间坐标系之间的坐标系映射关系,可以将该质心坐标位置在传送方向Y上对应的空间坐标位置确定为扫描识别位置Py。
或者,处理器组件300也可以基于可疑藏匿封装体920与被配置为线阵阵列的背散射探测器阵列500在传送方向Y上的相对移动的单位偏移步长Δy、以及背散射成像数据包括的线扫描条形图像在检测到可疑藏匿封装体920之前的累积条数m,确定扫描识别位置Py,即,扫描识别位置Py的位置坐标值可以表示为如下的表达式(1):
Py=Δy×m表达式(1)。
其中,单位偏移步长Δy可以是由上述相对移动的移动速度(即第一传送110和第二传送机构120的传送速率)、以及背散射探测器阵列500的成像频率确定,并且,该移动速度和成像频率是可配置的。
仍参见图2,在本申请的实施例中,衍射检测组件800可移动地装设在衍射检测通道700内,衍射检测组件800在衍射检测通道700内的移动方向平行于第二透射射线在衍射检测通道700内的线性方向(即平行于衍射检测通道700的通道宽度方向X’),相应地,处理器组件300可以用于:
基于可疑藏匿封装体920的横向定位位置Px,确定衍射检测组件800在第二透射射线的线性方向(即衍射检测通道700的通道宽度方向X’)上的目标偏移位置。
请继续参见图2,衍射检测组件800包括至少两个检测单元850,至少两个检测单元850集成装设于衍射检测组件800,并且,前文提及的衍射检测组件800在第二透射射线的线性方向(即衍射检测通道700的通道宽度方向X’)上的偏移,是指至少两个检测单元850的同步偏移。其中,每个检测单元850可以包括能谱探测器851、位于能谱探测器851的前端的索拉狭缝852、以及用于能谱探测器851在衍射检测组件800集成装配的底座853。其中,索拉狭缝852可以由相互平行的金属片形成,以避免衍射射线在能谱探测器851的前端发散,并且,能谱探测器851基于通过索拉狭缝852的衍射射线,可以生成衍射能量谱数据。
如前文所述,第二透射射线的准直方向Z’与第二传送机构120的承载平面X’Y’相交(例如垂直于第二传送机构120的承载平面X’Y’),并且,如图2所示,至少两个检测单元850的单元检测范围沿第二透射射线的准直方向Z’交错排布,以使得至少两个检测单元850分别用于基于在第二透射射线的准直方向Z’上的不同位置区域接收到的衍射射线生成衍射能量谱数据。其中,每个检测单元850在第二透射射线的准直方向Z’上对应的位置区域的区域尺寸在图2中表示为Δh,并且,每个检测单元850在第二透射射线的准直方向Z’上对应的位置区域的区域尺寸Δh,与该检测单元850的能谱探测器851的晶体尺寸W、以及该检测单元850的能谱探测器851相对于第二传送机构120的承载平面X’Y’的倾斜角度α关联,该关联关系可以表示为如下的表达式(2):
Δh=W/sinα表达式(2)
相应地,处理器组件300可以用于:
基于可疑藏匿封装体920的深度定位位置Pz,确定在第二透射射线的准直方向Z’上的目标位置区域,以促使在该目标位置区域接收衍射射线的检测单元850被选通。
也就是,衍射检测组件80在可疑藏匿封装体920位于衍射检测通道700的期间内对衍射射线的射线接收位置,包括:衍射检测组件800在第二透射射线的线性方向(即衍射检测通道700的通道宽度方向X’)上的目标偏移位置,以及,衍射检测组件800在第二透射射线的准直方向Z’上的目标位置区域。即,上述的目标偏移位置和目标位置区域用于表征衍射检测组件80的射线接收位置。
对于可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz的确定,在本申请的实施例中可以采用不同的定位方式。
图3为如图1所示的检测系统的第一定位实例的原理示意图。请参见图3,在本申请的第一定位实例中,背散射探测器阵列500以第一射线接收角度θ1接收背散射射线,透射探测器阵列400以第二射线接收角度θ2接收透射衰减射线,背散射探测器阵列500和透射探测器阵列400在空间深度方向Z上隔着第一传送机构相对布置,第一射线接收角度θ1和所述第二射线接收角度θ2之间存在角度差异。
例如,背散射探测器阵列500装设有用于准直构件600,该准直构件600的准直通道以第一射线接收角度θ
在本申请实施例的第一定位实例中,第一射线接收角度θ1和所述第二射线接收角度{θ
处理器组件300可以被具体配置为:
基于可疑藏匿封装体920在背散射图像和透射图像中的图像位置信息,确定可疑藏匿封装体920在透射探测器阵列400和背散射探测器阵列500的定位参考方向上的成像位置,其中,该定位参考方向平行于上述角度差异所在的角平面与背散射探测器阵列500和透射探测器阵列400的阵列平面的交线;
基于可疑藏匿封装体920在透射探测器阵列400和背散射探测器阵列500的定位参考方向上的成像位置、以及预先设定的位置转换参数,确定可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz,其中,该位置转换参数与第一射线接收角度θ1和第二射线接收角度{θ
在第一定位实例中,可疑藏匿封装体920在背散射图像中的图像位置信息,可以包括前文描述的背散射图像中的高亮像素区域的质心在与定位参考方向相对应的图像方向上的质心坐标位置;并且,可疑藏匿封装体920在透射图像中的图像位置信息,可以包括透射图像中与前文描述的质心位置对应的映射点,在与定位参考方向相对应的图像方向上的映射点坐标位置。
对于图像位置到成像位置的转换,一种可选的方式是:处理器组件300基于质心坐标位置、以及背散射图像的图像坐标系与空间坐标系之间的坐标系映射关系,确定可疑藏匿封装体920在背散射探测器阵列500的定位参考方向上的成像位置;以及,处理器组件300基于映射点坐标位置、以及透射图像的图像坐标系与空间坐标系之间的坐标系映射关系,确定可疑藏匿封装体920在透射探测器阵列400的定位参考方向上的成像位置。
在第一定位实例中,处理器组件300可以不使用坐标系之间的坐标系映射关系,而使用探测器阵列中的阵列坐标来表征成像位置。
具体地,在第一定位实例中,背散射探测器阵列500和透射探测器阵列400的阵列平面相互平行,空间深度方向Z垂直于背散射探测器阵列500和透射探测器阵列400的阵列平面,并且,定位参考方向包括背散射探测器阵列500和透射探测器阵列400的行列方向中平行于前述角平面的其中一个方向。
在此情况下,位置转换参数包括:定位参考方向上的任意坐标位置与可疑藏匿封装体920的空间位置在前述角平面内的投影位置之间的平面几何关系,该平面几何关系与第一射线接收角度θ1和第二射线接收角度{θ
基于可疑藏匿封装体920在背散射图像和透射图像中的图像位置信息,确定背散射探测器阵列500和透射探测器阵列400中对可疑藏匿封装体920成像的目标探测器在定位参考方向上的阵列坐标位置,该阵列坐标位置用于表征可疑藏匿封装体920在透射探测器阵列400和背散射探测器阵列500的定位参考方向上的成像位置;
基于背散射探测器阵列500和透射探测器阵列400中对可疑藏匿封装体920成像的目标探测器在定位参考方向上的阵列坐标位置、以及上述的平面几何关系,确定可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz。
在第一定位实例的图示表达中,以前述的角平面平行于竖直平面XZ、背散射探测器阵列500和透射探测器阵列400的行方向均平行于通道宽度方向X为例,在此情况下,定位参考方向包括背散射探测器阵列500和透射探测器阵列400的行方向,并且,背散射探测器阵列500和透射探测器阵列400中对可疑藏匿封装体920成像的目标探测器在定位参考方向上的阵列坐标位置包括:背散射探测器阵列500中对可疑藏匿封装体920成像的第一目标探测器的第一行坐标位置det_1_i,以及,透射探测器阵列400中对可疑藏匿封装体成像的第二目标探测器的第二行坐标位置det_2_j,即,处理器组件300可以基于第一行坐标位置det_1_i和第二行坐标位置det_2_j、以及前述的平面几何关系,确定可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz。
请继续关注图3,在第一定位实例中,前述的平面几何关系可以包括:前述角平面内的虚拟三角形的底高转换关系,该虚拟三角形具有平行于定位参考方向的底边、以及与底边相对的顶点,该底边的两侧底角分别与第一射线接收角度θ1和第二射线接收角度{θ
在此情况下,处理器组件300可以被具体配置为:
基于第二行坐标位置det_2_j,确定虚拟三角形与第二射线接收角度{θ
基于第一行坐标位置det_1_i相比于参考行坐标位置的位置偏移量x0,确定虚拟三角形在与第二射线接收角度{θ
基于虚拟三角形的底边的边长、以及该虚拟三角形的底高转换关系所表征的尺寸关系,确定该虚拟三角形的顶点相对于底边的高H;
基于虚拟三角形的高H,确定可疑藏匿封装体920的深度定位位置Pz和横向定位位置Px。
其中,深度定位位置Pz可以等于该虚拟三角形的顶点相对于底边的高H,在此情况下,深度定位位置Pz的坐标值可以表示为如下的表达式(3):
H=x0×tanθ
并且,横向定位位置Px可以基于第一行坐标位置det_1_i相比于参考行坐标位置的位置偏移量x0、以及深度定位位置Pz确定,例如,横向定位位置Px的坐标值可以表示为如下的表达式(4):
Px=x0+H/tanθ
若第一射线接收角度θ1为90°,则,上述的表达式(3)可以简化为如下的表达式(5),并且,横向定位位置Px可以被赋值为阵列坐标位置(例如第一行坐标位置det_1_i):
H=x0×tanθ
优选地,在第一定位实例中,透射探测器阵列400和背散射探测器阵列500均选用线阵阵列。
图4为如图1所示的检测系统的第二定位实例的原理示意图。请参见图4,在本申请实施例的第二定位实例中,对可疑藏匿封装体920的深度定位位置Pz和横向定位位置Px的确定可以不涉及射线探测器阵列400,而是仅依靠背散射探测器阵列500,并且,在第二定位实例中,背散射探测器阵列500包括第一背散射探测器阵列510和第二背散射探测器阵列520,第一背散射探测器阵列510和第二背散射探测器阵列在第一传送机构110的扫描传送方向Y上错位布置,第一背散射探测器阵列510以第一射线接收角度θ1接收背散射射线,第二背散射探测器阵列520以第二射线接收角度θ2接收背散射射线,并且,第一射线接收角度θ1和第二射线接收角度θ2之间存在角度差异。
例如,第一背散射探测器阵列510装设有第一准直构件610,第二背散射探测器阵列520装设有第二准直构件620,第一准直构件610的第一准直通道在平行于以第一射线接收角度θ
在本申请实施例的第二定位实例中,第一射线接收角度θ1和所述第二射线接收角度θ
处理器组件300可以被具体配置为:
基于可疑藏匿封装体920在背散射图像中的图像位置信息,确定可疑藏匿封装体920在第一背散射探测器阵列510和第二背散射探测器阵列520的定位参考方向上的成像位置,其中,该定位参考方向平行于前述角平面与第一背散射探测器阵列510和第二背散射探测器阵列520的阵列平面的交线;
基于可疑藏匿封装体920在第一背散射探测器阵列510和第二背散射探测器阵列520的定位参考方向上的成像位置、以及预先设定的位置转换参数,确定可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz,其中,该位置转换参数与第一射线接收角度θ1和所述第二射线接收角度θ
其中,上述的背散射图像可以包括基于第一背散射探测器阵列510产生的第一背散射成像数据生成的第一背散射图像,以及,基于第二背散射探测器阵列520产生的第二背散射成像数据生成的第二背散射图像,第一背散射图像和第二背散射图像中都可以包括前文提及的高亮像素区域,对可疑藏匿封装体920的筛查可以使用第一背散射图像和第二背散射图像中任意一个的高亮像素区域,并且,在确定成像位置时使用的图像位置信息,可以包括第一背散射图像和第二背散射图像中的高亮像素区域的质心在与定位参考方向相对应的图像方向上的质心坐标位置。
与第一定位实例同理,第二定位实例对于图像位置到成像位置的转换可以使用坐标系之间的坐标系映射关系,也可以使用探测器阵列中的阵列坐标来表征成像位置。
若以探测器阵列中的阵列坐标来表征成像位置,则,在第二定位实例中,第一背散射探测器阵列510和第二背散射探测器阵列520的阵列平面相互平行、且同向平齐,空间深度方向Z垂直于第一背散射探测器阵列510和第二背散射探测器阵列520的阵列平面,并且,定位参考方向包括第一背散射探测器阵列510和第二背散射探测器阵列520的行列方向中平行于前述角平面的其中一个方向。
在此情况下,位置转换参数包括:定位参考方向上的任意坐标位置与可疑藏匿封装体920的空间位置在前述角平面内的投影位置之间的平面几何关系,该平面几何关系与第一射线接收角度θ1和第二射线接收角度θ
基于可疑藏匿封装体920在背散射图像中的图像位置信息,确定第一背散射探测器阵列510和第二背散射探测器阵列520中对可疑藏匿封装体920成像的目标探测器在定位参考方向上的阵列坐标位置,该阵列坐标位置用于表征可疑藏匿封装体920在第一背散射探测器阵列510和第二背散射探测器阵列520的定位参考方向上的成像位置;
基于第一背散射探测器阵列510和第二背散射探测器阵列520中对可疑藏匿封装体920成像的目标探测器在定位参考方向上的阵列坐标位置、以及上述的平面几何关系,确定可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz。
在第二定位实例的图示表达中,以前述的角平面平行于竖直平面XZ、第一背散射探测器阵列510和第二背散射探测器阵列520的行方向均平行于通道宽度方向X为例,在此情况下,定位参考方向包括第一背散射探测器阵列510和第二背散射探测器阵列520的行方向,并且,第一背散射探测器阵列510和第二背散射探测器阵列520中对可疑藏匿封装体920成像的目标探测器在定位参考方向上的阵列坐标位置包括:第一背散射探测器阵列510中对可疑藏匿封装体920成像的第一目标探测器的第一行坐标位置det_1_i,以及,第二背散射探测器阵列520中对可疑藏匿封装体成像的第二目标探测器的第二行坐标位置det_2_j,即,类似于第一定位实例,处理器组件300在第二定位实例中也可以基于第一行坐标位置det_1_i和第二行坐标位置det_2_j、以及前述的平面几何关系,确定可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz。
请继续关注图4,在第二定位实例中,前述的平面几何关系也可以包括第一定位实例中提及的虚拟三角形的底高转换关系,不同于第一定位实例的是,第二实例中的虚拟三角形底边的其中一侧底角所关联的第二射线接收角度θ
在此情况下,处理器组件300在第二定位实例中可以被具体配置为:
基于第一行坐标位置det_1_i和第二行坐标位置det_2_j之间的位置差Δx,确定虚拟三角形的底边的边长;
基于虚拟三角形的底边的边长和底高转换关系所表征的尺寸关系,确定虚拟三角形的顶点相对于底边的高H;
基于虚拟三角形的顶点相对于底边的高H,确定可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz。
其中,深度定位位置Pz可以等于该虚拟三角形的顶点相对于底边的高H,在此情况下,深度定位位置Pz的坐标值可以表示为如下的表达式(6):
H=Δx×tanθ
并且,横向定位位置Px可以基于第一行坐标位置det_1_i、第一背散射探测器阵列510中的每两个探测器中心点在行方向上的间距W
Px=W
若第一射线接收角度θ1为90°,则,上述的表达式(6)和(7)可以分别简化为如下的表达式(8)和(9):
H=Δx×tanθ
Px=W
优选地,在第二定位实例中,第一背散射探测器阵列510和第二背散射探测器阵列520。
图5为如图1所示的检测系统的第三定位实例的原理示意图。请参见图5,在本申请实施例的第三定位实例中,对可疑藏匿封装体920的深度定位位置Pz和横向定位位置Px的确定仍可以仅依靠背散射探测器阵列500,并且,背散射探测器阵列500包括第一背散射探测器阵列510和第二背散射探测器阵列520,并且,第一背散射探测器阵列510接收背散射射线的第一射线接收角度θ1和第二探测器阵列520接收背散射射线的第二射线接收角度θ2之间存在角度差异。
但不同于第二定位实例的是,在第三定位实例中,第一背散射探测器阵列510和第二背散射探测器阵列520的阵列平面相对倾斜,并且,第二背散射探测器阵列520选用面阵阵列。
相应地,在第三定位实例中,处理器组件300可以被具体配置为:
基于可疑藏匿封装体920在背散射图像中的图像位置信息,确定可疑藏匿封装体920在第一背散射探测器阵列510和第二背散射探测器阵列520的成像位置,该成像位置包括确定可疑藏匿封装体920在第二背散射探测器阵列520的其中一个的定位参考方向上的成像位置,以及,可疑藏匿封装体920在第一背散射探测器阵列510的与定位参考方向垂直的方向上的成像位置,即,不同于第二定位实例,在第三定位实例中确定的是可疑藏匿封装体920在第一背散射探测器阵列510或第二背散射探测器阵列520在定位参考方向上的成像位置,并辅以与定位参考方向垂直的方向上的另一成像位置,并且,该定位参考方向平行于前述角平面与第二背散射探测器阵列520的阵列平面的交线;
基于可疑藏匿封装体920在第一背散射探测器阵列510和第二背散射探测器阵列520的定位参考方向上的成像位置、以及预先设定的位置转换参数,确定可疑藏匿封装体920的横向定位位置Px和深度定位位置Pz,其中,该位置转换参数与第一射线接收角度θ1和所述第二射线接收角度θ
其中,上述的背散射图像及其中的图像位置信息,可以与第二定位实例提及的第一背散射图像和第二背散射图及其中的质心位置坐标基本相同,此处不再赘述。而且,与第一定位实例和第二定位实例同理,第三定位实例对于图像位置到成像位置的转换可以使用坐标系之间的坐标系映射关系,也可以使用探测器阵列中的阵列坐标来表征成像位置。
若以探测器阵列中的阵列坐标来表征成像位置,则,在第三定位实例中,定位参考方向包括第一背散射探测器阵列510或第二背散射探测器阵列520的行列方向中相对于空间深度方向Z倾斜的其中一个方向,并且,位置转换参数可以包括:定位参考方向上的任意坐标位置与空间深度方向上的标定位置之间的位置映射关系,该位置映射关系与第二射线接收角度θ2关联。
在此情况下,处理器组件300可以被具体配置为:
基于可疑藏匿封装体920在背散射图像中的图像位置信息,确定第一背散射探测器阵列510和第二背散射探测器阵列520中对可疑藏匿封装体920成像的目标探测器的阵列坐标位置,该阵列坐标位置用于表征所述成像位置、并包括:第一背散射探测器阵列510中对可疑藏匿封装体成像的第一目标探测器在垂直于定位参考方向的方向上的第一阵列坐标位置,以及,第二背散射探测器阵列520中对可疑藏匿封装体成像的第二目标探测器在定位参考方向上的第二阵列坐标位置;
基于第一阵列坐标位置,确定可疑藏匿封装体920的横向定位位置Px;
基于上述的位置映射关系,将与第二阵列坐标位置对应的标定位置H_ref_p确定为可疑藏匿封装体920的深度定位位置Pz。
在第三定位实例的图示表达中,第二背散射探测器阵列520的阵列平面绕通道宽度方向X相对于空间深度方向Z倾斜,第二背散射探测器阵列520的阵列平面相对于空间深度方向Z的倾斜角度与第二射线接收角度θ2关联,前述角平面与第二背散射探测器阵列520的阵列平面的交线平行于选用面阵阵列的该第二背散射探测器阵列520的列方向,第二背散射探测器阵列520的行方向平行于通道宽度方向X,定位参考方向为第二背散射探测器阵列520的列方向,前述的第一阵列坐标位置包括所述第一背散射探测器阵列510中对可疑藏匿封装体920成像的第一目标探测器的行坐标位置,并且,前述的第二阵列坐标位置包括第二背散射探测器阵列520中对可疑藏匿封装体920成像的第二目标探测器的列坐标位置。
相应地,处理器组件300可以被具体配置为:
基于第一目标探测器的行坐标位置,确定可疑藏匿封装体920的横向定位位置Px;
基于上述的位置映射关系,将与第二目标探测器的列坐标位置对应的标定位置确定为可疑藏匿封装体920的深度定位位置Pz。
图6为本申请的实施例中基于透射射线的检测方法的流程示意图。请参见图6,在本申请的实施例中,以对可疑藏匿封装体的筛查作为对目标物质识别之后的补检为例,基于透射射线的检测方法可以包括:
S610:在基于透射成像数据生成的透射图像中,识别被第一传送机构传送的被检对象中的目标物质,其中,第一传送机构用于传送被检对象途经成像检测通道,成像检测通道部署有用于产生第一透射射线的第一射线源、以及透射探测器阵列和背散射探测器阵列,透射探测器阵列用于基于第一透射射线穿透被检对象后的透射衰减射线产生透射成像数据,并且,背散射探测器阵列用于基于第一透射射线在被检对象形成的背散射射线生成背散射成像数据。
在本申请的实施例中,S610对目标物质的识别可以基于与原子序数关联的任意一种目标识别算法来实现。例如,若第一透射射线包括双能透射射线,则,透射成像数据可以包括高能透射成像数据和低能成像数据,并且,透射图像包括高能透射图像和低能透射图像,在此情况下,S610可以具体包括:基于高能透射图像和低能透射图像,确定被检对象900的内部物质的原子序数;并且,基于被检对象900的内部物质的原子序数,识别被检对象900内部的目标物质,其中,目标物质的原子序数低于预设的原子序数阈值(例如18)。S610确定的原子序数可以由与原子序数关联的R值来表征,并且,S610可以基于确定的R值、以及预设的双能R值曲线,识别被检对象中的内部物质是否为目标物质。
优选地,S610可以进一步包括:响应于对目标物质的成功识别,产生第一报警信号。
S630:利用基于背散射成像数据生成的背散射图像,筛查被检对象中除目标物质之外的非目标物质是否包括可疑藏匿封装体。
在本申请的实施例中,作为一种优选方式,S630可以通过在背散图像中检测用于表征可疑藏匿封装体的高亮像素区域,筛查被检对象中除目标物质之外的非目标物质(例如原子序数高于原子序数阈值的无机物质)是否包括可疑藏匿封装体,该高亮像素区域中的各像素的像素值均高于预设像素阈值。例如,S630可以具体包括:
基于对背散射图像的尺度转换,生成与透射图像具有适配尺度的适配背散射图像,其中,对背散射图像的尺度转换可以包括诸如几何配准和图像缩放等图像处理;
确定透射图像中表征目标物质的目标识别区域,在适配背散射图像中位置匹配的像素映射区域;
将适配背散射图像中适配背散射图像中的像素值置零,并且,适配背散射图像中包括非零像素的区域用于表征非目标物质(例如原子序数高于原子序数阈值的无机物质);
基于对适配背散射图像中的非零像素的轮廓检测,得到对被检对象的内部物质(即诸如原子序数高于原子序数阈值的无机物质等非目标物质)在适配背散射图像中的轮廓位置区域;
基于在适配背散射图像中检测到的轮廓位置区域,对背散射图像进行区域分割,例如,对背散射图像的区域分割可以采用诸如距离正则化水平集算法等任意一种图像分割算法;
在背散射图像中通过区域分割得到的各像素区域中,搜索前文提及的用于表征可疑藏匿封装体的高亮像素区域,高亮像素区域可以被看作是背散射图像中的ROI。
S650:响应于对可疑藏匿封装体的成功筛查,将被第一传送机构传送出成像检测通道的所述被检对象转移至第二传送机构,以促使被检对象被第二传送机构送达衍射检测通道,衍射检测通道部署有用于产生第二透射射线的第二射线源、以及衍射检测组件,衍射检测组件用于基于第二透射射线穿透被检对象产生的衍射射线生成衍射能量谱数据。
S670:基于在被检对象位于衍射检测通道的期间内生成的衍射能量谱数据,确定可疑藏匿封装体中是否藏匿有所述目标物质。
在本申请的实施例中,作为一种优选方式,S670可以具体包括:基于被检对象900位于衍射检测通道700的期间内生成的衍射能量谱数据,与预先设定的衍射能量谱样本的相似度,确定对所述可疑藏匿封装体中是否藏匿有所述目标物质的衍射检测的检测结果。其中,预先设定的衍射能量谱样本为诸如原子序数高于原子序数阈值的无机物质等非目标物质样本在掺杂有目标物质样本时收集得到的,并且,衍射能量谱数据与衍射能量谱样本的相似度高于预设的相似度阈值,则表示可疑藏匿封装体920中藏匿有目标物质。
优选地,S670可以进一步包括:响应于表示可疑藏匿封装体中藏匿有目标物质的检测结果,产生第二报警信号。
基于上述检测方法,可以在成像检测通道中同时对被检对象进行透射成像和背散射成像,利用背散射图像对目标物质具有“高亮效果”的特性,可以对透射图像中未识别出目标物质的图像区域进行对可疑藏匿封装体的筛查;如若筛查出被检对象的内部具有可疑藏匿封装体,则,还可以将该被检对象从途经成像检测通道的第一传送机构转移至途经衍射检测通道的第二传送机构,以便于在衍射检测通道对该可疑藏匿封装体进行用于确定其是否藏匿目标物质的衍射检测,并且可以避免衍射检测的耗时与第一传送机构的实时传送需求之间的冲突,从而,有助于在兼顾实时传送需求的情况下避免对藏匿的目标物质的漏检。
可以理解的是,若对可疑藏匿封装体的筛查作为独立的检测过程,则,如图6所示的检测方法可以直接从S630开始执行,即,在S630利用背散射图像筛查被检对象中是否包括可疑藏匿封装体,并且,筛查范围不区分目标对象中的目标物质和非目标物质。
另外,为了提升在衍射检测通道中的衍射检测效率,本申请实施例中的检测方法可以进一步包括用于确定可疑藏匿封装体的空间位置的步骤,以便于在包含可疑藏匿封装体的被检对象到达衍射检测通道后,快速启动对可疑藏匿封装体的定位衍射检测。其中,该空间位置可以包括可疑藏匿封装体在第一传送机构的扫描传送方向Y上的扫描识别位Py、可疑藏匿封装体在成像检测通道的通道宽度方向X上的横向定位位置Px、以及空间深度方向Z上的深度定位位置Pz。
图7为如图6所示的检测方法的扩展流程示意图。请参见图7,本申请的实施例中的检测方法可以进一步包括在S670之前执行的S711~S715和/或S721~S723,其中,若同时包括S711~S715以及S721~S723,则S711~S715可以与S721~S723并行执行。
S711:响应于对可疑藏匿封装体的成功筛查,确定可疑藏匿封装体在第一传送机构的扫描传送方向Y上的扫描识别位置Py。
例如,S711可以基于可疑藏匿封装体在背散图像中的图像位置信息,确定扫描识别位置Py。
再例如,S711还可以基于可疑藏匿封装体与被配置为线阵阵列的背散射探测器阵列在传送方向Y上的相对移动的单位偏移步长Δy、以及背散射成像数据包括的线扫描条形图像在检测到可疑藏匿封装体920之前的累积条数m,确定扫描识别位置Py。
S713:以可疑藏匿封装体在第一传送机构的扫描传送方向Y上的扫描识别位置Py为起始位置,对该可疑藏匿封装体进行位置跟踪,对可疑藏匿封装体的位置跟踪可以与第一传送机构的第一传送速率、以及第二传送机构的第二传送速率关联,并且,该位置跟踪还可以进一步使用从扫描识别位置Py到衍射检测通道中的衍射检测位置处的传送路径长度等其他辅助参数;
S715:基于对可疑藏匿封装体的位置跟踪结果,确定可疑藏匿封装体到达衍射检测通道。
例如,第二射线源产生的第二透射射线可以沿垂直于第二传送机构的送检传送Y’方向的线性方向分布,在此情况下,S715可以具体包括:当位置跟踪结果与线性覆盖范围位置匹配时,确定可疑藏匿封装体到达衍射检测通道。
S721:响应于对可疑藏匿封装体的成功筛查,基于可疑藏匿封装体的图像位置信息,确定可疑藏匿封装体在成像检测通道的通道宽度方向X上的横向定位位置Px、以及空间深度方向Z上的深度定位位置Pz。
在本申请的实施例中,S721确定横向定位位置Px和深度定位位置Pz的具体方式,可以参见前文的第一定位实例、第二定位实例以及第三定位实例中对处理器组件300的相关描述,此处不再赘述。
S723:基于横向定位位置Px和深度定位位置Pz,确定衍射检测组件在可疑藏匿封装体位于衍射检测通道的期间内对衍射射线的射线接收位置。
例如,若衍射检测组件可移动地装设在衍射检测通道内,第二透射射线的准直方向垂直于第二传送机构的承载平面X’Y’,第二透射射线沿垂直于第二传送机构的送检传送方向Y’的线性方向分布,并且,衍射检测组件在衍射检测通道内的移动方向平行于该线性方向,则,衍射检测组件可以包括至少两个检测单元,至少两个检测单元的单元检测范围沿第二透射射线的准直方向Z’交错排布,并且,至少两个检测单元分别用于基于在第二透射射线的准直方向Z’上的不同位置区域接收到的衍射射线生成衍射能量谱数据。在此情况下,S723可以具体包括:
基于横向定位位置Px,确定衍射检测组件在上述线性方向上的目标偏移位置;
基于深度定位位置Pz,确定在第二透射射线的准直方向Z’上的目标位置区域,以促使在目标位置区域接收衍射射线的检测单元被选通。
也就是,上述的目标偏移位置和目标位置区域可以用于表征衍射检测组件在可疑藏匿封装体位于衍射检测通道的期间内对衍射射线的射线接收位置。
图8为本申请的实施例中基于透射射线的检测装置的结构示意图。请参见图8,在本申请的实施例中,基于透射射线的检测装置可以包括目标识别模块810、藏匿筛查模块830、补检触发模块850以及藏匿确定模块870。
其中,目标识别模块810的功能可以参见前述检测方法中关于S610的相关表描述,藏匿筛查模块830的功能可以参见前述检测方法中关于S630的相关描述,补检触发模块850的功能可以参见前述检测方法中关于S650,藏匿确定模块870的功能可以参见前述检测方法中关于S670的相关描述,此处不再赘述。
可以理解的是,若对可疑藏匿封装体的筛查作为独立的检测过程,则,如图8所示的检测装置可以不包括目标识别模块810,并且,藏匿筛查模块830在利用背散射图像筛查被检对象中是否包括可疑藏匿封装体时,筛查范围可以不区分目标对象中的目标物质和非目标物质。
图9为如图8所示的检测装置的扩展结构示意图。请参见图9,本申请实施例中的检测装置还可以包括位置跟踪模块910和/或空间定位模块920,位置跟踪模块910的功能可以参见前述检测方法中关于S711~S715的相关描述,空间定位模块920的功能可以参见前述检测方法中关于S721~S723的相关描述,此处不再赘述。
在本申请的实施例中,还提供了一种非瞬时计算机可读存储介质,该非瞬时计算机可读存储介质存储指令,这些指令在由处理器执行时使得该处理器执行如前述实施例中描述的检测方法。
以上所述仅为本申请的较佳实施例而已,并不用以限制本申请,凡在本申请的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本申请保护的范围之内。