餐厨垃圾车动态自动称重装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种餐厨垃圾车载称重装置,特别涉及一种餐厨垃圾车动态自动称重装置。
背景技术
随着居民生活水平的提高,垃圾产生量也在逐年增多。为了进一步加强城市生活垃圾清运精细化管理,实现垃圾源头车载称重的目标,需要在收运车辆上加装车载称重设备。
餐厨垃圾车动态自动称重装置想要实现高精度称重,最大的技术难点在于如何规避压板压力的影响。为了保证垃圾桶在车顶倾倒的时候,桶不脱落,在桶沿上方要设置压板。压板不仅仅是一块板,与压板相连的是整个活动框架。活动框架在滑槽内沿预定轨迹上下运动。这样一来,压板压在桶上力包括了活动框架的重量和活动框架与滑槽的摩擦力。摩擦力是随着车辆润滑情况、司机操作动作甚至车辆停放倾角、天气情况等因素而变化的值,是一个难以预测的,一定范围内随机变化的值。所以要实现餐厨垃圾车动态自动高精度称重,就必须解决压板压力不确定性的问题。
与本发明比较接近的技术方案有申请号为201510367860.3的专利,该技术方案使用压桶力补偿机构来解决压板压力不确定性的问题。所谓压桶力补偿机构主要的技术思路是通过额外增加测力传感器的方案,测量压板压力,用于对称重传感器进行补偿。该技术方案理论上可行,但是增加了装置的复杂性,在餐厨车这样工况十分恶劣的条件下,非常容易损坏。
发明内容
本发明解决的技术问题是提供一种餐厨垃圾车动态自动称重装置,利用上升阶段联动钩搭装置勾住导向下支撑部,实现了在提桶上升称重阶段压板不压到桶沿,当桶上升到某个位置时,联动钩搭装置被限位凸轮结构顶出,压板压牢桶沿,从而达到了稳定可靠的高精度测量、安全不掉桶和无垃圾污水抛洒的目的。
本发明解决其技术问题所采用的技术方案是:一种餐厨垃圾车动态自动称重装置,包括提桶装置和称重装置;所述提桶装置包括活动框架、导轨和导向下支撑部;所述活动框架和导向下支撑部均设置于导轨上;所述提桶装置还包括动力滑移部及其驱动装置;所述导向下支撑部与动力滑移部连接;所述称重装置设置于动力滑移部上;还包括防止称重时活动框架顶部的压板压住垃圾桶的联动勾搭装置;所述联动勾搭装置是一种在垃圾桶竖直上升时带动活动框架随动力滑移部运动的装置;所述联动勾搭装置设置于活动框架上;所以导轨下部竖直,上部弯曲;所述导轨的竖直部分上设置有限位凸轮。
进一步的是:所述动力滑移部上设置有挂桶承载部;所述挂桶承载部和动力滑移部之间设置有测力传感器。
进一步的是:所述联动钩搭装置包括固定端和摆动端;所述固定端固定于活动框架上;所述摆动端一端通过销轴与固定端铆接,另一端通过拉紧弹簧与活动框架连接;所述摆动端远离固定端的一端设置有横杆;所述横杆一端搭在导向下支撑部上,另一端朝着远离导向下支撑部的方向延伸。
进一步的是:所述联动勾搭装置还可设置于导向下支撑部、与活动框架相连的部分或导向下支撑部与活动框架之间。
本发明的有益效果为:采用动态称重,在垃圾桶竖直上升运动过程中通过测力传感器完成垃圾的称重,可保持原有的倒桶速度,节省停顿时间;通过联动钩搭装置,实现了在提桶上升阶段活动框架的压板不压到桶沿,确保称重过程中活动框架和压板不会对称重精度产生干扰,从而达到了稳定可靠的高精度测量;当上升到联动钩搭装置被限位凸轮结构顶出时,压板压牢桶沿,同时在倾倒垃圾时保证垃圾桶不会掉落,垃圾不会抛洒。
附图说明
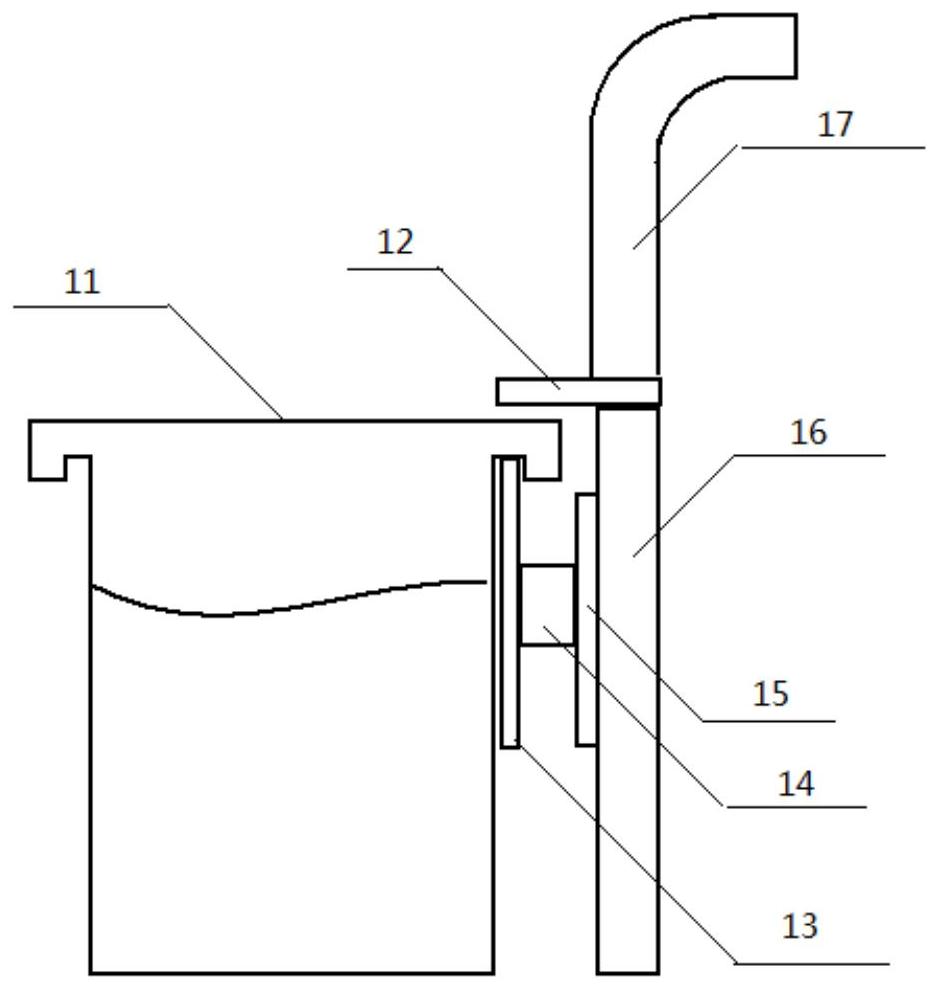
图1为提桶装置示意图;
图2为餐厨垃圾车动态自动称重装置结构示意图
图3为联动钩搭装置结构示意图。
图中标记为:11、垃圾桶;12、压板;13、挂桶承载部;14、测力传感器;15、动力滑移部;16、活动框架;17、导轨;25、导向下支撑部;27、驱动装置;30、联动勾搭装置;32、固定端;33、销轴;34、摆动端;35、横杆;36、拉紧弹簧;37、限位凸轮。
具体实施方式
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
如图1和图2所示,一种餐厨垃圾车动态自动称重装置,包括提桶装置和称重装置;所述提桶装置包括活动框架16、导轨17和导向下支撑部25;所述活动框架16和导向下支撑部25均设置于导轨17上;所述提桶装置还包括动力滑移部15及其驱动装置27;所述导向下支撑部25与动力滑移部15连接;所述称重装置设置于动力滑移部15上;还包括防止称重时活动框架16顶部的压板12压住垃圾桶11的联动勾搭装置30;所述联动勾搭装置30是一种在垃圾桶11竖直上升时带动活动框架16随动力滑移部15运动的装置;所述联动勾搭装置设置于活动框架16上;所以导轨17下部竖直,上部弯曲;所述导轨17的竖直部分上设置有限位凸轮37。
在上述基础上,所述动力滑移部15上设置有挂桶承载部13;所述挂桶承载部13和动力滑移部15之间设置有测力传感器14。
如图3所示,所述联动钩搭装置30包括固定端32和摆动端34;所述固定端32固定于活动框架16上;所述摆动端34一端通过销轴33与固定端32铆接,另一端通过拉紧弹簧36与活动框架16连接;所述摆动端34远离固定端32的一端设置有横杆35;所述横杆35一端搭在导向下支撑部25上,另一端朝着远离导向下支撑部25的方向延伸。
在上述基础上,所述联动勾搭装置30还可设置于导向下支撑部25、与活动框架16相连的部分或导向下支撑部25与活动框架16之间。
本发明采用的方式是利用在导向下支撑板25、活动框架16或与活动框架16连接的部位上加装联动勾搭装置30,使得在垃圾桶11竖直上升阶段,活动框架16随动力滑移部15一起运动,从而使得在该过程中,活动框架16的压板12不会接触垃圾桶11;在垃圾桶11上升到一定高度时,由于限位凸轮37的存在,使得联动钩搭装置30会脱离导向下支撑部25或者活动框架16,从而使得活动框架16脱离于动力滑移部15的同步运动,使得活动框架16的压板12可以压紧垃圾桶11桶沿。
实际应用中有多种实施方式可实现提桶上升阶段活动框架16和压板12不压到桶沿,翻转倒料阶段压板12压牢桶沿的目的,凡是利用上升阶段通过限位凸轮结构37时,联动钩搭装置被顶出的连接装置,均与本发明本质上相同。
本实施例中联动钩搭装置30为摆杆形式;实际工作中,当开始提桶上升的阶段,驱动装置27驱动动力滑移部15上升,动力滑移部15带动导向下支撑部25向上运动。导向下支撑部25将横杆35提升,从而带动活动框架16上升。为了受力的均匀和增加承载能力,可以在活动框架16左右两边各设置一套联动钩搭装置30。当横杆35运行到限位凸轮结构37时,限位凸轮37的坡度会挤压横杆35,使得摆动端34克服拉紧弹簧36的拉力,摆动端34不再紧贴在活动框架16上,横杆35会从导向下支撑部25上表面滑落至导向下支撑部25前表面,完成脱扣分离,活动框架16失去导向下支撑部25的抬升,停止运动;此时动力滑移部15继续提桶上升,直至动力滑移部15驱动垃圾桶11边沿顶住压板12,从而继续带动活动框架16上升,直至完成翻桶。此过程中压板12将垃圾桶11边沿压住,可防止垃圾桶11掉落。倒完垃圾后,开始回复行程。垃圾桶11会从倾倒状态变为竖直状态。当垃圾桶11落地,活动框架16停止运动后,动力滑移部15还会继续往下运动一段距离,此过程中摆动端34在拉簧36拉力作用下,会将横杆35从导向下支撑部25的前表面拉回到上表面,完成整个复位动作,可以进行下一桶垃圾的倾倒。
上述实施例不应以任何方式限制本发明,凡采用等同替换或等效转换的方式获得的技术方案均落在本发明的保护范围内。
- 餐厨垃圾车动态自动称重装置
- 餐厨垃圾车动态自动称重装置