冲压用机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及机械加工领域,具体是冲压用机器人。
背景技术
冲压是靠压力机和模具对板材、带材、管材和型材等施加外力,使之产生塑性变形或分离,从而获得所需形状和尺寸的工件(冲压件)的成形加工方法。冲压和锻造同属塑性加工(或称压力加工),合称锻压。冲压的坯料主要是热轧和冷轧的钢板和钢带。全世界的钢材中,有60~70%是板材,其中大部分经过冲压制成成品。汽车的车身、底盘、油箱、散热器片,锅炉的汽包,容器的壳体,电机、电器的铁芯硅钢片等都是冲压加工的。仪器仪表、家用电器、自行车、办公机械、生活器皿等产品中,也有大量冲压件。冲压加工是借助于常规或专用冲压设备的动力,使板料在模具里直接受到变形力并进行变形,从而获得一定形状、尺寸和性能的产品零件的生产技术。板料,模具和设备是冲压加工的三要素。按冲压加工温度分为热冲压和冷冲压。前者适合变形抗力高,塑性较差的板料加工;后者则在室温下进行,是薄板常用的冲压方法。它是金属塑性加工(或压力加工)的主要方法之一,也隶属于材料成型工程技术。冲压所使用的模具称为冲压模具,简称冲模。冲模是将材料(金属或非金属)批量加工成所需冲件的专用工具。冲模在冲压中至关重要,没有符合要求的冲模,批量冲压生产就难以进行;没有先进的冲模,先进的冲压工艺就无法实现。冲压工艺与模具、冲压设备和冲压材料构成冲压加工的三要素,只有它们相互结合才能得出冲压件。
传统的冲压都是通过简单的压力机与模具对应冲压板材,这种冲压方式需要人工进行操作,整体效果不是特别好,不能够实现自动化加工,在冲压的过程中,整个落料机构相对来说落料比较麻烦,不能够很好的将加工之后的板材进行取出,整个落料机构相对比较复杂,同时在进行冲压时,不能够很好的进行板材的夹持,整个冲压过程有可能会造成不稳定的情况,而使得冲压失败。
因此,本领域技术人员提供了冲压用机器人,以解决上述背景技术中提出的问题。
发明内容
本发明的目的在于提供冲压用机器人,以解决上述背景技术中提出的传统的冲压都是通过简单的压力机与模具对应冲压板材,这种冲压方式需要人工进行操作,整体效果不是特别好,不能够实现自动化加工,在冲压的过程中,整个落料机构相对来说落料比较麻烦,不能够很好的将加工之后的板材进行取出,整个落料机构相对比较复杂,同时在进行冲压时,不能够很好的进行板材的夹持,整个冲压过程有可能会造成不稳定的情况,而使得冲压失败的问题。
为实现上述目的,本发明提供如下技术方案:
冲压用机器人,包括连接板A、斜体支撑杆A和固定圆盘,所述连接板A的内部插接有加强筋管,所述加强筋管的外壁插接有连接板B和移动套板,所述连接板A和连接板B的顶面固定连接有伸缩板,所述伸缩板的顶面固定连接有伸缩支杆,所述伸缩支杆的顶面固定连接有顶部衔接块,所述顶部衔接块的一侧焊接有一级液压缸,所述一级液压缸的另一端焊接有一级液压支杆,所述一级液压支杆的另一侧套接有固定块A,所述斜体支撑杆A的一端固定连接有伸缩支杆,所述斜体支撑杆A的另一端转动连接有斜体支撑架A,所述斜体支撑架A的另一端固定连接有顶端横条,所述顶端横条的另一端固定连接有斜体支撑架B,所述斜体支撑架B的另一端转动连接有斜体支撑杆B,所述顶端横条的底面设有电路控制箱,所述电路控制箱的底面设有二级液压缸,所述二级液压缸的底端套接有二级液压支杆,所述二级液压支杆的底端焊接有固定圆盘,所述固定圆盘的底面焊接有连接柱体,所述连接柱体的外壁套接有三级夹紧架,所述三级夹紧架的另一侧固定连接有夹紧环体C,所述连接柱体的底面焊接有套环块,所述固定圆盘的底面设有夹紧环体A和夹紧环体B,所述夹紧环体A的顶面固定连接有一级夹紧架,所述夹紧环体B的底面固定连接有二级夹紧架,所述套接顶柱的顶面固定连接有上限位块,所述套接顶柱的底面固定连接有下限位块,所述下限位块的底面固定连接有落料支撑环板,所述落料支撑环板的底面固定连接有承受柱,所述承受柱的底面焊接有移动套板。
作为本发明的一种优选实施方式:所述连接板A与连接板B分别位于加强筋管的两端,且移动套板位于连接板A与连接板B的之间,且移动套板位于落料支撑环板的垂直正下方。
作为本发明的一种优选实施方式:所述一级液压缸和一级液压支杆设置有两组,分别位于连接板A和连接板B的顶部,连接板B顶面的一级液压缸和一级液压支杆的另一侧固定连接有固定块B。
作为本发明的一种优选实施方式:所述伸缩板和伸缩支杆设置有两组,分别位于连接板A和连接板B的顶面,且伸缩板和伸缩支杆一组设有两个,靠近连接板A的一组两个伸缩支杆之间固定连接有斜体支撑杆A,靠近连接板B的一组两个伸缩支杆之间固定连接有斜体支撑杆B。
作为本发明的一种优选实施方式:所述夹紧环体C的内部插接有冲压施力板B和冲压施力板A,冲压施力板A的一侧焊接有固定块A,冲压施力板B的一侧焊接有固定块B,冲压施力板B和冲压施力板A为高强度耐磨性材料。
作为本发明的一种优选实施方式:所述夹紧环体A和夹紧环体B之间平行设置,且夹紧环体A和夹紧环体B与夹紧环体C之间也平行设置。
作为本发明的一种优选实施方式:所述一级夹紧架和二级夹紧架的内部套接有套接顶柱,一级夹紧架和二级夹紧架之间设有中部限位块,二级夹紧架和套接顶柱之间设有锁紧器。
与现有技术相比,本发明的有益效果是:
1、本发明冲压用机器人,在进行整体的冲压时,能够通过夹紧装置进行很好的夹紧,两个工件之间能够将板材放置在一级夹紧架和二级夹紧架之间,这样的夹紧方式使得整个板材不会出现变形,能够在冲压的过程中进行板材夹紧操作,不会造成冲压过程不稳定的情况,使得整个冲压能够更加顺利的进行。
2、本发明冲压用机器人,同时在进行冲压时,能够将需要冲压的物体直接的放置在板材上,然后通过冲压施力板的作用向下压,能够使得整个板材,在物体的作用下形成规则的冲压模型之后,直接的掉落到底部的落料支撑环板上,实现整个自动化加工,整体的加工效率更快。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
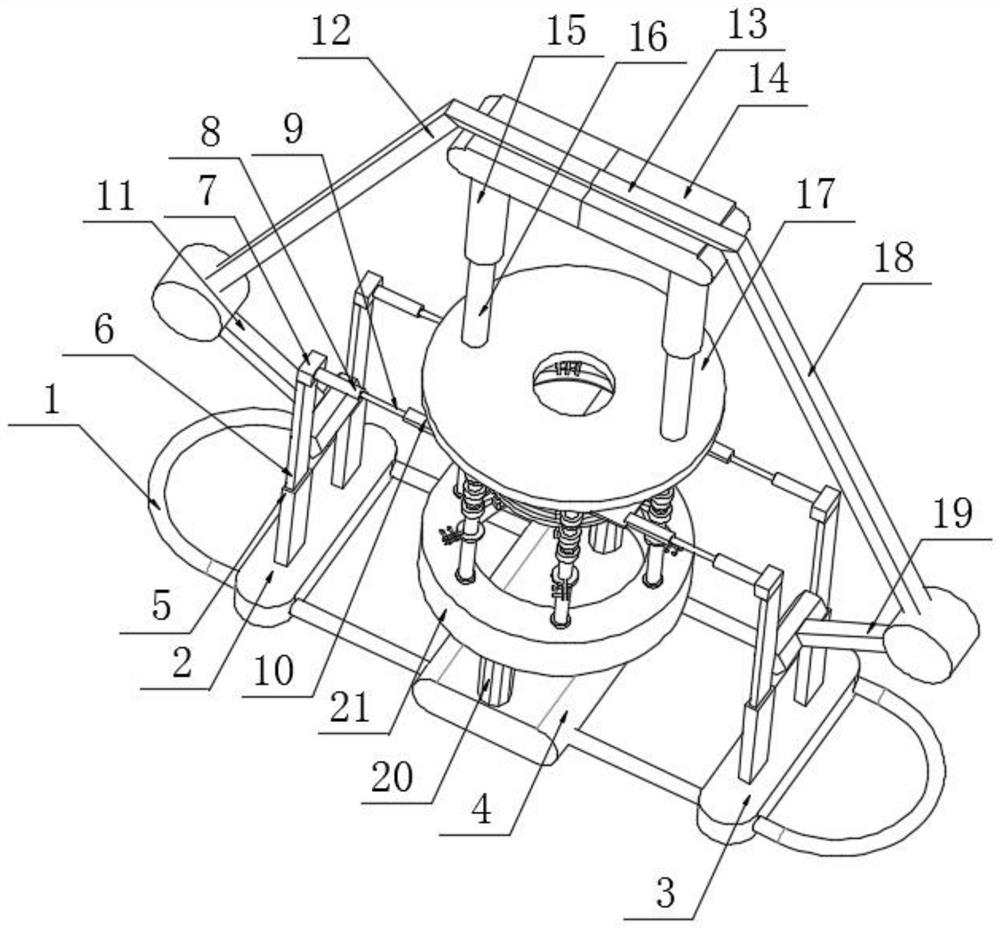
图1为冲压用机器人的整体的立体的结构示意图;
图2为冲压用机器人中的整体的等轴侧视的立体结构示意图;
图3为冲压用机器人中的工件夹紧机构的立体的结构示意图;
图4为冲压用机器人中的工件夹紧机构的等轴侧视的立体结构示意图。
图5为冲压用机器人中的工件冲压施力板连接部分的立体的结构示意图。
图6为冲压用机器人中的工件冲压施力板连接部分的等轴侧视的立体的结构示意图。
图中:1、加强筋管;2、连接板A;3、连接板B;4、移动套板;5、伸缩板;6、伸缩支杆;7、顶部衔接块;8、一级液压缸;9、一级液压支杆;10、固定块A;11、斜体支撑杆A;12、斜体支撑架A;13、顶端横条;14、电路控制箱;15、二级液压缸;16、二级液压支杆;17、固定圆盘;18、斜体支撑架B;19、斜体支撑杆B;20、承受柱;21、落料支撑环板;22、夹紧环体A;23、夹紧环体B;24、上限位块;25、一级夹紧架;26、中部限位块;27、二级夹紧架;28、锁紧器;29、套接顶柱;30、下限位块;31、冲压施力板A;32、固定块B;33、夹紧环体C;34、冲压施力板B;35、连接柱体;36、三级夹紧架;37、套环块。
具体实施方式
请参阅图1-6,本发明实施例中,冲压用机器人,包括连接板A2、斜体支撑杆A11和固定圆盘17,连接板A2的内部插接有加强筋管1,加强筋管1主要是进行加强操作,加强筋管1的外壁插接有连接板B3和移动套板4,连接板A2和连接板B3的顶面固定连接有伸缩板5,连接板A2和连接板B3用于整体的连接,伸缩板5的顶面固定连接有伸缩支杆6,伸缩板5和伸缩支杆6配合使用,实现伸缩功能,伸缩支杆6的顶面固定连接有顶部衔接块7,顶部衔接块7的一侧焊接有一级液压缸8,一级液压缸8的另一端焊接有一级液压支杆9,一级液压缸8和一级液压支杆9能够将冲压施力板B34和冲压施力板A31伸展开,一级液压支杆9的另一侧套接有固定块A10,斜体支撑杆A11的一端固定连接有伸缩支杆6,斜体支撑杆A11的另一端转动连接有斜体支撑架A12,斜体支撑架A12的另一端固定连接有顶端横条13,顶端横条13的另一端固定连接有斜体支撑架B18,斜体支撑架B18能够实现斜体支撑的作用,斜体支撑架B18的另一端转动连接有斜体支撑杆B19,顶端横条13的底面设有电路控制箱14,电路控制箱14的底面设有二级液压缸15,电路控制箱14进行电路的控制,二级液压缸15的底端套接有二级液压支杆16,冲压施力板B34和冲压施力板A31在二级液压缸15和二级液压支杆16的作用下,进行下压,然后能完成冲压,完成冲压之后,落料直接的掉落到落料支撑环板21上,二级液压支杆16的底端焊接有固定圆盘17,固定圆盘17的底面焊接有连接柱体35,连接柱体35的外壁套接有三级夹紧架36,三级夹紧架36的另一侧固定连接有夹紧环体C33,连接柱体35的底面焊接有套环块37,固定圆盘17的底面设有夹紧环体A22和夹紧环体B23,夹紧环体A22和夹紧环体B23直接的进行夹紧,能够保证板材的夹紧,避免出现松动,夹紧环体A22的顶面固定连接有一级夹紧架25,夹紧环体B23的底面固定连接有二级夹紧架27,套接顶柱29的顶面固定连接有上限位块24,套接顶柱29的底面固定连接有下限位块30,下限位块30的底面固定连接有落料支撑环板21,在物体的作用下形成规则的冲压模型之后,直接的掉落到底部的落料支撑环板21上,实现整个自动化加工,整体的加工效率更快,落料支撑环板21的底面固定连接有承受柱20,承受柱20的底面焊接有移动套板4。
请参阅图1、图3和图6,连接板A2与连接板B3分别位于加强筋管1的两端,且移动套板4位于连接板A2与连接板B3的之间,移动套板4能够实现整个的移动,且移动套板4位于落料支撑环板21的垂直正下方。一级液压缸8和一级液压支杆9设置有两组,分别位于连接板A2和连接板B3的顶部,连接板B3顶面的一级液压缸8和一级液压支杆9的另一侧固定连接有固定块B32。一级液压缸8和一级液压支杆9能够保证冲压施力板B34和冲压施力板A31的开启和关闭,伸缩板5和伸缩支杆6设置有两组,分别位于连接板A2和连接板B3的顶面,且伸缩板5和伸缩支杆6一组设有两个,靠近连接板A2的一组两个伸缩支杆6之间固定连接有斜体支撑杆A11,冲压施力板B34和冲压施力板A31在二级液压缸15和二级液压支杆16的作用下,进行下压,然后能完成冲压,完成冲压,靠近连接板B3的一组两个伸缩支杆6之间固定连接有斜体支撑杆B19。夹紧环体C33的内部插接有冲压施力板B34和冲压施力板A31,冲压施力板A31的一侧焊接有固定块A10,冲压施力板B34的一侧焊接有固定块B32,冲压施力板B34和冲压施力板A31为高强度耐磨性材料。冲压施力板B34和冲压施力板A31能够反复使用,完成多次冲压工序,夹紧环体A22和夹紧环体B23之间平行设置,且夹紧环体A22和夹紧环体B23与夹紧环体C33之间也平行设置。一级夹紧架25和二级夹紧架27的内部套接有套接顶柱29,一级夹紧架25和二级夹紧架27用于稳定板材的冲压,保证冲压的顺利进行,一级夹紧架25和二级夹紧架27之间设有中部限位块26,二级夹紧架27和套接顶柱29之间设有锁紧器28。
需要说明的是,本发明为冲压用机器人,包括1、加强筋管;2、连接板A;3、连接板B;4、移动套板;5、伸缩板;6、伸缩支杆;7、顶部衔接块;8、一级液压缸;9、一级液压支杆;10、固定块A;11、斜体支撑杆A;12、斜体支撑架A;13、顶端横条;14、电路控制箱;15、二级液压缸;16、二级液压支杆;17、固定圆盘;18、斜体支撑架B;19、斜体支撑杆B;20、承受柱;21、落料支撑环板;22、夹紧环体A;23、夹紧环体B;24、上限位块;25、一级夹紧架;26、中部限位块;27、二级夹紧架;28、锁紧器;29、套接顶柱;30、下限位块;31、冲压施力板A;32、固定块B;33、夹紧环体C;34、冲压施力板B;35、连接柱体;36、三级夹紧架;37、套环块,部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
本发明的工作原理是:使用者在进行使用时,能够之间的通过底部的二级夹紧架27和三级夹紧架36直接的实现整个的板材的夹紧操作,这样的操作,能够有效的通过夹紧装置进行很好的夹紧,两个工件之间能够将板材放置在一级夹紧架27和二级夹紧架29之间,这样的夹紧方式使得整个板材不会出现变形,能够在冲压的过程中进行板材夹紧操作,不会造成冲压过程不稳定的情况,使得整个冲压能够更加顺利的进行,然后在需要冲压的板材上放上需要冲压的零件模型,之后在冲压施力板B34和冲压施力板A31的作用下,直接的进行给力操作,能够完成冲压过程,冲压施力板B34和冲压施力板A31在二级液压缸15和二级液压支杆16的作用下,进行下压,然后能完成冲压,完成冲压之后,落料直接的掉落到落料支撑环板21上,这样的能够进行落料的收集,能够将需要冲压的物体直接的放置在板材上,然后通过冲压施力板B34和冲压施力板A31的作用向下压,能够使得整个板材,在物体的作用下形成规则的冲压模型之后,直接的掉落到底部的落料支撑环板21上,实现整个自动化加工,整体的加工效率更快。
以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种四轴冲压机器人的冲压方法
- 一种可有效减少冲压件碎裂的冲压机器人