一种随车吊力矩保护冗余系统及方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于起重装备技术领域,尤其涉及一种随车吊力矩保护冗余系统及方法。
背景技术
随车吊,全称随车起重运输车,是一种通过液压举升及伸缩系统来实现货物的升降、回转、吊运的设备,通常装配于载货汽车上。一般由载货汽车底盘、货厢、取力器、吊机组成。集吊装和运输于一体,多用于车站、仓库、码头、工地、野外救援等场所。可配备不同长度的货厢和不同吨位的吊机。随车吊的机动性较强,使用过程比较灵活。力矩保护器是随车吊的核心安全系统,力矩检测精度决定了随车吊的作业性能。随车吊力矩保护器一般都是采用油压传感器和长角传感器来检测起重力矩,检测精低,误差大。进入力矩保护限制时,只能通过强制解除开关进行解除,解除后,操作人员有时会忘记恢复强制解除开关,存在安全隐患,易造成安全事故。
发明内容
针对现有技术不足,本发明的目的在于提供一种随车吊力矩保护冗余系统及方法,解决了背景技术中的问题,提高了检测精度,同时提供一种冗余的力矩保护限制解除方法,防止操作人员的误操作,进一步提升了系统的安全性。
本发明提供如下技术方案:
一种随车吊力矩保护冗余系统,包括:力矩检测模块,控制器模块,主油路切断电磁阀,限制接触模块,报警模块,显示器模块;所述力矩检测采集块,用于测量当前随车吊作业力矩;所述控制器模块,用于采集随车吊力矩信息,判断当前力矩状态,可驱动主油路切断电磁阀和报警模块,禁止系统操作;所述限制解除模块,用于长效或短效解除力矩保护限制;所述报警模块,用于报警提醒。
优选的,所述力矩检测模块包括拉力传感器,倾角传感器,磁致伸缩位移传感器,通过电线与控制模块相连;所述拉力传感器设置在拉绳上,用于检测起吊重量;所述倾角传感器,设置在吊臂上,用于检测吊臂的倾角;所述磁致伸缩位移传感器,置于伸缩油缸上,测量油缸的伸缩位移量;
优选的,所述限制解除模块,包括暂时解除开关、强制解除开关、二极管;所述暂时解除开关为一闭一开两位自复位开关,所述强制解除开关为一闭一开两位自锁开关,两个开关串联安装在控制器和主油路切断电磁阀之间,暂时解除开关短时恢复臂架操作,强制解除开关关闭力矩保护系统;所述二极管安装在强制解除开关常开出口端与主油路切断电磁阀线圈之间,防止触动强制解除报警器误报警。
优选的,所述限制解除模块的线路设计,暂时解除开关常闭进口端接控制模块主油路切断电磁阀驱动输出端口,常开进口接车载电池电源,常闭出口端与强制解除开关常闭进口端相连,常开出口端与控制器输入口端相连;强制解除开关常开进口端接车载电池电源,常开出口端与二极管正极、强制解除报警器正极、控制模块强制解除检测端口相连,二极管负极与常闭出口端短接与主油路切断电磁阀线圈相连,以上都是通过电线相连。
优选的,所述报警模块,包括强制操作报警器、力矩保护报警器;所述强制操作报警器为单色声光报警器,安装在强制解除开关和二极管之间,按下强制解除开关时,强制操作报警器工作;所述力矩保护报警器为双色声光报警器,进入力矩保护亮红色灯,当按下暂时解除开关,仍处于力矩保护范围,亮黄色灯。
优选的,所述显示器模块用于车辆吊臂姿态显示,显示随车吊臂架的起吊重量、倾斜角度、伸长量,便于计算臂架的力矩;同时可以对系统内部参数进行修改,用户只能通过私钥才能进入参数修改系统,进一步确保系统安全性。
优选的,所述私钥为指纹解锁,密码验证解锁,刷脸解锁,声音解锁中的一种解锁方式或者多种方式相结合解锁,用户验证身份解锁后对系统进行操作。
优选的,所诉系统参数修改,系统力矩检测模块在不同环境和长时间工作,发生零点偏移后,可通过系统参数进行力矩检测模块的偏差效验,客户可根据自己的操作习惯对恢复力矩保护作业阈值时间进行自由设置,更具有灵活性。
优选的,所述数据保存模块,包括数据传输模块,后台服务器模块;所述数据传输模块与控制模块通过电线相连,将吊臂姿态参数和操作人员操作流程进行保存,可以进行本地保存和远程保存模式,远程保存通过内部远程传输模块传输给后台服务器;所述后台服务器模块,可以保存和查询姿态数据和操作人员流程。
优选的,一种随车吊力矩保护方法,其特征在于,包括以下步骤:
1) 吊装力矩计算,通过控制器模块计算当前吊臂的力矩,并判断是否超出安全力矩范围;
2) 暂时解除力矩保护检测,通过暂时解除力矩保护检测算法,判断是否需要暂时解除力矩保护限制;
3) 暂时解除力矩保护恢复检测,通过暂时解除力矩保护恢复算法,恢复暂时解除力矩保护限制。
优选的,所述暂时解除力矩保护恢复算法,通过检测执行暂时解除力矩保护,则恢复打开主油路切断电磁阀,进入暂时解除力矩保护模式,当超过阈值时间,系统仍处于危险力矩作业状态,再次切断打开主油路切断电磁阀,进入力矩保护限制。
与现有技术相比,本发明具有以下有益效果:
(1)本发明提供了高精度、多传感的力矩检测方案,可以提高力矩测量的精准度,提升车辆的作业性能;
(2)本发明对解除力矩保护模块的内部线路进行了优化设计,存在干涉的元器件间做了隔离处理,可避免相互干扰和误报警,确保各元器件间的有序工作;
(3)本发明提供了长效和短效的力矩保护解除机制,可有效减少因为操作人员误操作而引发的安全事故,提高了系统的安全性和可靠性;
(4)本发明可以通过数据保存模块,对吊臂的姿态和操作流程等进行监控,便于故障排查和安全事故认定。
附图说明
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
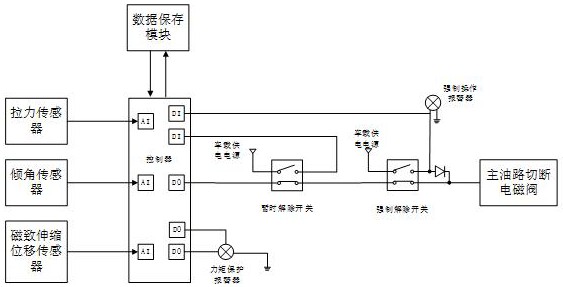
图1是本发明的系统构成及线路示意图。
图2是本发明的控制流程示意图。
图3是本发明的力矩保护安全控制逻辑图。
具体实施方式
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
实施例一:
如图1所示,一种随车吊力矩保护冗余系统,包括:力矩检测模块,控制器模块,主油路切断电磁阀,限制接触模块,报警模块,显示器模块,数据保存模块;所述力矩检测采集块,用于测量当前随车吊作业力矩;所述控制器模块,用于采集随车吊力矩信息,判断当前力矩状态,可驱动主油路切断电磁阀和报警模块,禁止系统操作;所述主油路切断电磁阀为常闭阀,其得电线圈与控制模块的输出端口相连;所述限制解除模块,用于长效或短效解除力矩保护限制;所述报警模块,用于报警提醒。
所述力矩检测模块包括拉力传感器,倾角传感器,磁致伸缩位移传感器,通过电线与控制模块相连;所述拉力传感器设置在拉绳上,用于检测起吊重量;所述倾角传感器,设置在吊臂上,用于检测吊臂的倾角;所述磁致伸缩位移传感器,置于伸缩油缸上,测量油缸的伸缩位移量。
所述主油路切断电磁阀为常闭阀,线圈得电,主油路切断电磁阀工作,液压主油路打开,线圈失电,主油路切断电磁阀不工作,切断液压主油路,禁止操作;
所述限制解除模块,包括暂时解除开关、强制解除开关、二极管;所述暂时解除开关为一闭一开两位自复位开关,所述强制解除开关为一闭一开两位自锁开关,两个开关串联安装在控制器和主油路切断电磁阀之间,暂时解除开关短时恢复臂架操作,强制解除开关关闭力矩保护系统;所述二极管安装在强制解除开关常开出口端与主油路切断电磁阀线圈之间,防止触动强制解除报警器误报警。
所述限制解除模块的线路设计,暂时解除开关常闭进口端接控制模块主油路切断电磁阀驱动输出端口,常开进口接车载电池电源,常闭出口端与强制解除开关常闭进口端相连,常开出口端与控制器输入口端相连;强制解除开关常开进口端接车载电池电源,常开出口端与二极管正极、强制解除报警器正极、控制模块强制解除检测端口相连,二极管负极与常闭出口端短接与主油路切断电磁阀线圈相连,以上都是通过电线相连。
所述报警模块,包括强制操作报警器、力矩保护报警器;所述强制操作报警器为单色声光报警器,安装在强制解除开关和二极管之间,按下强制解除开关时,强制操作报警器工作;所述力矩保护报警器为双色声光报警器,进入力矩保护亮红色灯,当按下暂时解除开关,仍处于力矩保护范围,亮黄色灯。
所述显示器模块用于车辆吊臂姿态显示,显示随车吊臂架的起吊重量、倾斜角度、伸长量,便于计算臂架的力矩;同时可以对系统内部参数进行修改,用户只能通过私钥才能进入参数修改系统,进一步确保系统安全性。
所述私钥为指纹解锁,密码验证解锁,刷脸解锁,声音解锁中的一种解锁方式或者多种方式相结合解锁,用户验证身份解锁后对系统进行操作。
所诉系统参数修改,系统力矩力矩检测模块在不同环境和长时间工作,发生零点偏移后,可通过系统参数进行力矩力矩检测模块的偏差效验,客户可根据自己的操作习惯对恢复力矩保护作业阈值时间进行自由设置,更具有灵活性。
所述数据保存模块,包括数据传输模块,后台服务器模块;所述数据传输模块与控制模块通过电线相连,将吊臂姿态参数和操作人员操作流程进行保存,可以进行本地保存和远程保存模式,远程保存通过内部远程传输模块传输给后台服务器;所述后台服务器模块,可以保存和查询姿态数据和操作人员流程。
实施例二:
与实施例一不同的是,所述暂时解除开关、强制解除开关前后顺序不同,强制解除开关常闭进口端接控制模块主油路切断电磁阀驱动输出端口,强制解除开关常开进口端接车载电池电源,强制解除常开出口端与二极管正极、强制解除报警器正极、控制模块强制解除检测端口相连,二极管负极与,强制解除开关常闭出口端短接与暂时解除开关常闭进口端相连;暂时解除开关常开进口接车载电池电源,常闭出口端与强制解除开关常闭进口端相连,常开出口端与控制器输入口端、主油路切断电磁阀线圈相连。
所述力矩保护报警器不仅仅为红、黄两种颜色的指示灯,可以为其他任意两种颜色。
实施例三:
一种随车吊力矩保护方法,包括以下步骤:
1)吊装力矩计算并判断,通过控制器模块计算当前吊臂的力矩,并判断是否超出安全力矩范围;
2)暂时解除力矩保护检测,通过暂时解除力矩保护检测算法,判断是否需要暂时解除力矩保护限制;
3)暂时解除力矩保护恢复检测,通过暂时解除力矩保护恢复算法,恢复暂时解除力矩保护限制。
实施例四:
结合图3所示,所述控制器模块采集力矩检测模块的各项数据,起吊重量记作G,吊臂的倾角记作Q,油缸的伸缩位移量记作S,吨位和机型不同,吊臂的伸长量L不同,可以根据以下算法求得:L=n*S+a,其中n为吊臂的节数,a则为全收状态臂架的长度。再通过力矩计算算法,精确得到当前随车吊作业力矩M=G*L*COSQ。
本系统还提供安全力矩保护逻辑控制方法,具体控制方法如下:
首先,假设最大安全作业力矩阈值M1,若M
接着,如果检测到暂时解除标志量为FALSE,说明系统未处于暂时解除状态,进一步检测是否执行暂时解除命令,若未检测到暂时解除开关信号由FALSE变为TRUE,则控制模块电磁阀驱动端口无输出,使主油路切断电磁阀线圈失电,禁止操作;若检测到暂时解除开关信号由FALSE变为TRUE,主油路切断电磁阀线圈得电,主油路供油通畅,且暂时解除标志量置为TRUE,开始计时累计暂时解除力矩保护时间T。
最后,如果检测到暂时解除标志量为TRUE,再判断暂时解除力矩保护时间T是否大于暂时解除有效时间T1,若T
以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化;凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种随车吊力矩保护冗余系统及方法
- 一种随车吊力矩保护冗余系统