植入体输送系统及其内管
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及医疗器械技术领域,尤其涉及一种植入体输送系统及其内管。
背景技术
随着腔内技术的发展,支架的使用已获得放射科医师、心脏病专家和外科医生的广泛认可,支架和覆膜支架这些装置用于支撑体内的各种管状通道,包括动脉、静脉、气道、胃肠道和胆管等。放置支架的首选方法是使用专业输送系统经由人体自身通道来精确放置并部署在预期治疗部位。借助于输送系统较小的外径,医生可以尽量减小手术切口以实现微创操作。
支架一般为可塑性变形(例如,“球囊可扩张”支架)或弹性变形(例如,“自扩张”支架),以便从压缩的状态恢复到工作状态下的直径。首先通过径向压缩将支架安装在输送系统上,并送入人体内,然后通过输送器体外部分的操纵机构来控制支架的释放,使支架恢复到其功能直径。目前通用的技术是,将支架径向压缩放置在两个同心导管之间的环形空间中,内管用于供导丝通过,当需要释放支架时,将外管相对于内管拉回,通过内、外管的相对轴向移位来释放支架,此时支架弹性恢复到预定的直径。
在具体的实施中,还需要在内管和外管之间增加一根同轴的中间管,该中间管位于支架近端并与支架轴向接触。在外管回拉时,中间管中保持不动,从而限制支架随外管一起回撤,使支架可以顺利地释放。由于该限位的存在,释放过程中支架势必会受到外管和中间管对其施加的轴向压缩力,这通常会导致支架发生短缩,并导致支架定位不准确。同时这种释放方式,还要求支架在压缩状态时具有较强的轴向刚性,否则释放过程中,支架短缩严重,甚至造成支架严重损伤。由此,支架的设计受到很大的限制,通常需要在支架段之间增加轴向的连接杆以解决支架轴向刚性的问题。但轴向连接杆将对支架的轴向疲劳、弯曲性能会产生不利的影响,很大程度上降低支架的整体性能。
解决上述问题的方法之一是优化或改变支架释放时的受力状态,使支架由轴向受压状态改变为受拉状态,或者尽量减小支架释放过程中所受到的轴向压缩力。如对比文献1(公开号为CN102499801A)所述的支架输送系统和对比文献2(公开号为CN104706449A)所述的支架输送系统,均通过输送系统远端的后释放机构来约束支架轴向位移,从而使支架释放过程中始终受拉而不发生短缩。但是这种方法由于后释放机构本身的体积较大,一般只适用于外管直径较粗的系统,另外由于释放过程中内管承受较大的轴向压缩力,释放过程中容易失稳弯曲。
而且以上输送系统,需要操作多个零部件来释放支架,支架释放后还需要操作机构来解除远端的后释放约束,存在释放繁杂困难的弊端。
发明内容
本发明的目的在于提供一种植入体输送系统及其内管,能够使植入体释放定位准确、稳定,不产生轴向短缩,同时能保证输送系统的安全回撤。
本发明为解决上述技术问题提供了一种用于输送植入体的内管,包括内管主体,以及设置在所述内管主体外表面上的摩擦体,所述摩擦体包括摩擦系数不同的第一摩擦层和第二摩擦层;所述摩擦体具有第一状态和第二状态,所述摩擦体处于第一状态时,所述第一摩擦层裸露于所述内管主体的外表面,所述摩擦体处于第二状态时,所述第一摩擦层被覆盖并且所述第二摩擦层裸露于所述内管主体的外表面。
优选地,所述第一摩擦层的摩擦系数大于所述第二摩擦层的摩擦系数。
优选地,所述第一摩擦层和所述第二摩擦层沿所述内管主体的轴向或径向分布。
优选地,所述内管包括多个所述摩擦体,多个所述摩擦体沿所述内管主体的轴向和/或周向分布。
优选地,所述第一摩擦层和所述第二摩擦层沿所述内管主体的轴向分布;所述摩擦体处于第一状态时,所述第二摩擦层在所述内管主体的轴向上折叠;所述摩擦体处于第二状态时,所述第二摩擦层在所述内管主体的轴向上展开并覆盖所述第一摩擦层。
优选地,所述摩擦体处于第一状态时,在所述内管的径向上,所述第一摩擦层的厚度大于或等于所述第二摩擦层的厚度。
优选地,所述第一摩擦层和所述第二摩擦层沿所述内管主体的径向分布,并且所述第一摩擦层位于所述内管主体和所述第二摩擦层之间;所述摩擦体处于第一状态时,所述摩擦体在所述内管主体的轴向上折叠,所述第一摩擦层裸露于所述内管主体的外表面;所述摩擦体处于第二状态时,所述摩擦体在所述内管主体的轴向上展开,所述第二摩擦层裸露于所述内管主体的外表面。
优选地,所述摩擦部沿所述内管主体的周向延伸,并且所述第二摩擦层在周向上分为至少两片。
优选地,所述第一摩擦层和/或所述第二摩擦层在轴向上的长度为1mm-5mm;所述第一摩擦层和/或所述第二摩擦层在径向上的厚度为0.1mm-0.5mm。
优选地,所述第一摩擦层的材料为硅胶或聚氨酯,和/或所述第二摩擦层的材料为聚四氟乙烯或乙烯三氟氯乙烯共聚物。
本发明为解决上述技术问题还提供了一种植入体输送系统,包括手柄、外管和上述内管,所述外管具有轴向贯通的内腔,所述内管位于所述内腔中并沿所述内腔的轴向延伸,所述外管和所述内管之间形成用于容纳所述植入体的间隙,所述外管和所述内管均与所述手柄连接,所述手柄控制所述外管和所述内管在轴向上的移动。
优选地,还包括植入体,所述植入体容置于所述外管和所述内管之间形成的间隙中,并包覆所述内管的所述摩擦体。
本发明对比现有技术有如下的有益效果:本发明提供的植入体输送系统及其内管通过在内管主体表面设置摩擦系数不同的第一摩擦层和第二摩擦层,并在不同状态下,所述第一摩擦层和所述第二摩擦层分别与植入体内表面接触,从而改变内管与植入体接触面的摩擦与润滑性能;当外管回撤时,外管与支架摩擦力较小,内管上摩擦系数较大的摩擦层与植入体接触且静摩擦力大,使得植入体释放定位准确、稳定,不产生轴向短缩;当内管回撤时,内管上摩擦系数较小的摩擦层与植入体接触且静摩擦力小,能够有效防止回撤过程中影响已释放植入体定位的问题,使得操作更加安全;另外,本发明提高了产品的易实现性和实用性,所述植入体使用范围可以包括所有动脉或静脉分支用和外周用小支架,以及其他可适用的植入体。
附图说明
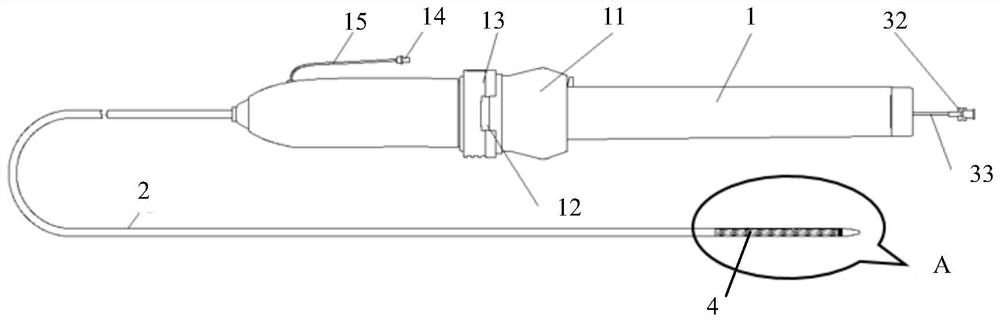
图1为本发明实施例中支架输送系统的整体结构示意图;
图2为图1中A处的内管结构示意图;
图3为图2中B处在折叠状态下的局部剖面放大示意图;
图4为图2中B处在展开状态下的局部剖面放大示意图;
图5为内管的周向分布示意图;
图6为本发明另一实施例在折叠状态下的内管的局部剖面放大示意图;
图7为本发明另一实施例在展开状态下的内管的局部剖面放大示意图。
图中:
1手柄 2外管 3内管 4支架
11旋转释放机构 12控制转盘 13转盘座 14单向阀
15输液管 31内管主体 32尾端连接件 33钢管
34摩擦体 341第一摩擦层 342第二摩擦层
343第一侧 344第二侧 3431第一面 3432第二面
具体实施方式
下面结合附图和实施例对本发明作进一步的描述。
为了更加清楚地描述本发明的结构特征,本发明采用“近端”、“远端”、“轴向”作为方位词,其中“近端”表示在手术过程中靠近操作者的一端;“远端”表示远离操作者的一端,轴向表示内管的轴线所在的方向。本发明所使用的术语“内”、“外”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。术语“或”通常是以包括“和/或”的含义而进行使用的,除非内容另外明确指出外。
本发明提供了一种解决支架释放过程短缩问题的内管及输送系统,通过在内管主体表面设置摩擦系数不同的第一摩擦层和第二摩擦层,并在不同状态下,所述第一摩擦层和所述第二摩擦层分别与植入体内表面接触,从而改变内管与植入体接触面的摩擦与润滑性能;当外管回撤时,外管与支架摩擦力较小,内管上摩擦系数较大的摩擦层与植入体接触且静摩擦力大,使得植入体释放定位准确、稳定,不产生轴向短缩;当内管回撤时,内管上摩擦系数较小的摩擦层与植入体接触且静摩擦力小,能够有效防止回撤过程中影响已释放植入体定位的问题,使得操作更加安全。
本实施例中的植入体以血管支架为例进行说明,血管支架由圆筒形聚酯片或其他高分子材料和多个自扩张的合金支架段缝合或热熔而成,或者仅包含合金支架部分。本发明提供的植入体输送系统及其内管,通过内管上设置不同摩擦系数的摩擦层,在血管支架释放的过程中,支架和内管上的高摩擦系数的摩擦层接触,支架与内管间摩擦力大,外管回撤不会改变支架轴向长度或使支架整体后移。当支架释放完毕,内管回撤时,支架和内管上的低摩擦系数的摩擦层接触,内管与定位好的支架之间摩擦较小,可以安全回撤。
请参见图1和图2,本实施例提供的植入体输送系统包括手柄1、外管2和内管3,外管2具有轴向贯通的内腔,内管3位于所述内腔中并沿所述内腔的轴向延伸,外管2和内管3之间形成用于容纳支架4的间隙,手柄1上设置有旋转释放机构11和可转动的控制转盘12来控制外管2在轴向上的移动,从而控制支架4的释放;控制转盘12固定在转盘座13上,手柄1的远端设置有输液管15和单向阀14,手术开始前,将充满生理盐水的注射器与单向阀14连接,将注射器内的生理盐水通过单向阀14、输液管15、内管3与外管2之间的间隙、支架4,最终从外管2的远端流出,将输送系统内部的空气完全排出,避免空气血栓的形成。手柄的近端伸出设置有钢管33和内管尾端连接件。支架4被压缩并安装在内管3和外管2之间。释放时,通过旋转释放机构11将外管2回撤,完成支架4的释放。释放完成后,通过整体回撤输送系统,将输送系统整体撤出体外。
本发明对手柄1及其组件的结构不做特别限制,手柄1可以为各种结构的手柄。内管3包括内管主体31,内管主体31在放置支架4处的外表面上设置摩擦体34,摩擦体34由具有不同摩擦系数的第一摩擦层341和第二摩擦层342构成,摩擦体34具有第一状态和第二状态,摩擦体34处于第一状态时,第一摩擦层341裸露于内管主体31的外表面,摩擦体34处于第二状态时,第一摩擦层341被覆盖并且第二摩擦层342裸露于内管主体31的外表面。较佳地,第一摩擦层341具有第一摩擦系数,第二摩擦层342具有第二摩擦系数,所述第一摩擦系数大于所述第二摩擦系数。进一步地,第一摩擦层341或/和第二摩擦层342构成多个摩擦体34,所述多个摩擦体34沿内管主体31的轴向和/或周向交替分布,所述摩擦体34与支架4的内表面接触产生摩檫力。所述摩擦体沿内管主体31的周向延伸,并且第二摩擦层342在周向上分为至少两片。支架4在压缩状态时,摩擦体34处于第一状态,第一摩擦层341与支架4的内表面接触;所述支架4在张开状态,内管3回撤时,触动摩擦层34处于第二状态,第二摩擦层342与支架4的内表面接触。本实施例的第一状态为折叠状态,第二状态为展开状态。在其它实施方式中,可以不局限于该两种状态。
实施例1
本实施例中,所述多个摩擦体34沿内管主体31的轴向分布,并且第一摩擦层341与第二摩擦层342沿内管主体31的轴向交替分布。
图2为图1中A处内管的结构示意图。请参见图2,内管3包括内管主体31,内管主体31远端的外表面在轴向上交替设置有第一摩擦层341和第二摩擦层342,第一摩擦层341由具有第一摩擦系数的材料构成,第二摩擦层342由具有第二摩擦系数的材料构成。具有第一摩擦系数的材料为高摩擦系数材料,优选为硅胶或聚氨酯;具有第二摩擦系数的材料为低摩擦系数材料,优选为聚四氟乙烯(PTFE)或乙烯三氟氯乙烯共聚物。本发明对具有第一摩擦系数的材料和具有第二摩擦系数的材料不做特别限制,不局限于本实施例提及的两种材料,只要能够满足摩檫力要求的材料都可以。在一实施方式中,第一摩擦层341和第二摩擦层342可以通过胶水粘结的方式固定连接在内管主体31的外表面,本发明对具体连接方式不做特别限制。请参见图3,当支架4在压缩状态下,内管3回撤前,第二摩擦层342处于折叠状态,未遮盖第一摩擦层341,使内管3整体处于高摩擦状态,支架4的内表面与第一摩擦层341接触,由第一摩擦层341构成的摩擦部提供了支架4释放所需要的摩擦力。在支架4释放的过程中,支架4与内管3间摩擦力大,外管2回撤不会改变支架4的轴向长度或使支架4整体向近端方向移动。请参见图4,当支架4释放完毕,内管3回撤(图示中为向右运动)时,由于内管3的轻微后移(图示中为向右运动),触动第二摩擦层342自动展开,展开后的第二摩擦层342覆盖在第一摩擦层341的外表面,使内管3整体处于低摩擦状态,支架4的内表面和第二摩擦层342接触,此时,由第二摩擦层342构成的摩擦部与支架4之间的摩檫力很小,因此,输送系统回撤时,内管3与定位好的支架4之间摩擦力很小,可以安全回撤。
请继续参见图3,在一较佳实施方式中,在折叠状态下,第一摩擦层341和第二摩擦层342在轴向上的长度相等,长度范围优选为1mm-5mm,,应小于支架4张开状态下的最小内径,第二摩擦层342展开后可以完全覆盖在第一摩擦层341的表面;在折叠状态下,在内管3的径向上,第一摩擦层341的厚度应等于或大于第二摩擦层342的厚度,以确保在该状态下,第一摩擦层341和支架4能够发生接触,厚度范围优选为0.1mm-0.5mm。
请参见图5,为使内管3回撤时,第二摩擦层342更容易展开并覆盖在第一摩擦层341表面,可将其设计为分瓣式的结构,第二摩擦层342在周向上可以均分为2-8片,优选4片,如图5所示。具体实施中,分瓣数量可以根据具体情况做调整。
实施例2
不同于实施例1中第一摩擦层341和第二摩擦层342的交替分布。本实施例的摩擦体34包括沿所述内管主体的径向分布的所述第一摩擦层341和所述第二摩擦层342,并且所述第一摩擦层341位于所述内管主体31和所述第二摩擦层342之间。请参见图6,内管主体31在放置支架4处的外表面设置的摩擦层34具有第一侧343和第二侧344;第一侧343具有第一摩擦层341,第二侧344具有第二摩擦层342。摩擦体34处于第一状态时,摩擦体34在内管主体31的轴向上折叠,第一侧343具有第一面3431和第二面3432,且第一侧343的至少第二面3432具有第一摩擦系数,第一侧343的第一面3431与内管主体31的外表面固定连接,第一侧343的第二面3432裸露于内管主体31的外表面。请参见图7,摩擦体34处于第二状态时,摩擦体34在内管主体31的轴向上展开,第一侧343的第二面3432与内管主体31的外表面接触,第二侧344裸露于内管主体31的外表面。当释放支架4时,摩擦体34处于折叠状态,如图6所示;此时,内管3的整体摩擦系数较大,具有高摩擦系数的第二面3432与支架4的内表面接触,支架4与内管3之间的摩檫力大,使支架4与内管3位置相对不动,支架4不会发生短缩。当支架4张开后,回撤内管3,内管3发生轻微后移时,触动摩擦体34自动展开,处于第二状态,将具有低摩擦系数的第二侧344裸露,如图7所示。此时,内管3的整体摩擦系数变小,由第二摩擦层342构成的第二侧344展开后与支架4的内表面接触,内管3可顺利后撤,且不带动支架4移位。
同样地,为使摩擦体34展开更容易,可以采用图5中的分瓣结构设计,摩擦体34在周向上可以均分为2-8片,优选4片。具体实施中,分瓣数量可以根据具体情况做调整。在折叠状态下,摩擦体34在轴向上的长度优选为1mm-5mm,应小于支架4张开状态下的最小内径;在径向上的厚度优选为0.1mm-0.5mm。
综上,本实施例提供的植入体输送系统及其内管至少具有以下优点:
1)内管结构特殊化精细化处理,将高摩擦材料及低摩擦材料应用在内管上改变内管外表面的摩擦与润滑性能;
2)外管回撤时,外管与支架之间的摩擦力较小,内管与支架接触且静摩擦力很大,使得支架释放定位准确、稳定,不产生轴向短缩;
3)该结构能够有效防止回撤过程中影响已释放支架定位的问题,减少内管与支架之间的摩擦力,使得操作更加安全;
4)本发明提高产品的易实现性和实用性,该类型支架使用范围可以包括所有动脉或静脉分支用和外周用小支架,以及其他可适用的植入体。
虽然本发明已以较佳实施例揭示如上,然其并非用以限定本发明,任何本领域技术人员,在不脱离本发明的精神和范围内,当可作些许的修改和完善,因此本发明的保护范围当以权利要求书所界定的为准。
- 一种植入体输送系统及其内管
- 一种植入体输送系统及其内管