具有可变通道几何形状的热泳颗粒检测系统
文献发布时间:2023-06-19 12:16:29
相关申请的交叉引用
本专利申请要求所有于2017年11月14日提交的美国临时专利申请62/586,130;62/586,134;62/586,141;62/586,143;以及62/586,148的优先权权益;所有这些申请的全部内容通过援引并入本文。
技术领域
本专利披露内容总体上涉及颗粒物检测领域,并且更具体地,涉及空气质量传感器以及用于确定空气传播性颗粒的含量的系统和方法。
背景技术
空气传播和其他气体传播性颗粒物(PM)(替代性地被称为气溶胶颗粒)的存在可能会导致空气质量变差并且可能对健康产生不利影响。这些颗粒可以渗透到人和动物的肺部,导致肺部疾病、心脏疾病、癌症和其他疾病。这种颗粒可能由许多来源产生,包括工业和农业加工、发电厂和车辆中的化石燃料燃烧、火灾、吸烟以及其他自然和人为原因。
直径为2.5微米或更小的空气传播性颗粒(常常被称为PM 2.5)往往特别有问题。这些大小更精细的颗粒可以在长时间段内保持悬浮在空气中,并且可以深度渗透到肺泡中。直径在0.1微米以下的空气传播性颗粒可以穿过肺部并且进入人体,从而对其他器官造成损害。中等大小(比如介于2.5微米与10微米之间)的颗粒(常常被称为PM 10),虽然不像较小的PM 2.5颗粒那样具有潜在的毒性,但在医学上也有问题,因为这些颗粒至少也可以渗透到肺部的外部部分中。相比之下,大小较大的颗粒(比如直径超过10微米的颗粒)从健康角度来看,往往问题较少。这是因为这种较大的颗粒不会深入地渗透到肺部中,并且往往会相对较快地从空气中沉淀下来。0.01微米到0.1微米范围内的纳米颗粒的影响相对未知,并且是一个活跃的研究领域,但是怀疑对健康有显著不利影响。
由于潜在的不利健康和环境影响,监测和控制空气传播性颗粒物引起了强烈的兴趣。各种健康、法律、政府、科学、工业和商业实体对监测空气传播和其他气体传播性颗粒物的方法都有相当大的兴趣。可以进一步区分各种大小的颗粒物质的方法特别有价值。当前用于监测颗粒物的系统往往相对庞大、复杂且昂贵,这通常使这些系统不适合大众市场使用。
使用常规方法测量直径低于约0.3微米的颗粒变得越来越困难。用于降低检测极限(LOD)和用于测量空气流中直径小至0.01微米的颗粒同时允许使用更小、更便宜的系统的技术特别有吸引力。
发明内容
在一些实施例中,本发明可以是一种用于分析空气流中的颗粒的系统,该系统包括进口和颗粒集中器。该颗粒集中器具有至少两个加热器元件,该至少两个加热器元件布置在包围该空气流的空气通道的相对侧上,并且被配置成以热泳方式迫使颗粒背离该空气通道的外周并朝向该空气通道的内部区域。该空气通道流体耦接到该进口。该系统包括具有至少一个加热器元件的颗粒鉴别器,该至少一个加热器元件被配置成以热泳方式迫使颗粒背离该空气通道的内部区域并朝向该空气通道的外周区域。该颗粒鉴别器在该颗粒集中器的下游方向上流体耦接到该颗粒集中器。该空气通道的截面几何形状在该进口、该颗粒集中器和该颗粒鉴别器中的至少一个内变化。
该进口可以包括鞘空气级,该鞘空气级具有用于提供样本空气的端口、用于提供鞘空气的至少一个鞘进气端口以及鞘空气组合区域。该鞘空气和该样本空气可以在该鞘空气组合区域中进行组合以形成组合空气流。该样本空气中的颗粒可以被预集中在该组合空气流的内部区域中。该组合空气流可以被提供到该颗粒集中器或该颗粒鉴别器。该鞘空气级可以包括平面鞘进气端口和平面鞘空气组合区域。该进口可以包括管状进口区段和围绕该管状进口区段的管状鞘空气区段。该管状鞘空气级可以包括至少一个鞘进气端口,并且可以被配置成在该鞘空气组合区域中将该鞘空气和该样本空气进行组合。
该进口可以包括定位于该鞘空气级与该颗粒集中器之间的气流压缩级。该气流压缩级可以具有随着该空气流横穿该气流压缩级而变窄的变化的空气通道截面几何形状。该气流压缩级可以使该空气流变窄以将颗粒预集中在该空气流的内部区域内。
该颗粒集中器内的空气通道可以变宽以减慢该空气流中的局部空气速度和局部颗粒速度。该颗粒集中器中的加热器元件可以被配置成随着该空气通道变宽而将这些颗粒保留在该空气通道的内部区域中。
该系统可以包括具有弯曲的空气通道的离心式颗粒分离器级,该离心式颗粒分离器级定位于该颗粒集中器与该颗粒鉴别器之间,用于随着该空气流中的这些颗粒横穿该弯曲的空气通道而将该空气流中的较重的颗粒与较轻的颗粒在空间上分离。该颗粒鉴别器可以包括颗粒检测器的二维阵列,这些颗粒检测器被配置成检测来自该离心式颗粒分离器级的空间上分离的颗粒。
该颗粒鉴别器可以包括气流膨胀级,该气流膨胀级定位于该离心式颗粒分离器级与该颗粒鉴别器之间,并且具有随着该空气流横穿该气流膨胀级而变宽的变化的空气通道。该离心式颗粒分离器级中空间上分离的颗粒可以在该气流膨胀级中被进一步分离。
该颗粒鉴别器内的空气通道的截面几何形状可以随着该空气流横穿该颗粒鉴别器而变宽。该颗粒鉴别器内的空气通道可以变宽以减慢该空气流中的局部空气速度和局部颗粒速度。该颗粒鉴别器中的加热器元件可以被配置成随着该空气通道变宽而将这些颗粒保留在该空气通道的内部区域中。该颗粒鉴别器内的空气通道的截面几何形状可以随着该空气流横穿该颗粒鉴别器而变窄。该空气通道的较窄区域可以允许在该变窄的区域中生成更高的热梯度和更大的热泳力。
附图说明
图1示出了用于分析空气流中的颗粒的系统的简化框图。
图2展示了分析横穿用于分析空气流中的颗粒的系统的颗粒的方法。
图3展示了热泳颗粒集中器的元件和操作。
图4展示了热泳颗粒鉴别器的元件和操作。
图5展示了筛分和鉴别空气流中的集中颗粒的方法。
图6示出了跨空气通道的颗粒位置与沿具有热泳颗粒集中器和热泳颗粒鉴别器的空气通道的距离的绘图。
图7示出了用于分析空气流中的颗粒的系统的框图。
图8描绘了用于分析空气流中的颗粒的系统的分解视图。
图9A至图9I展示了供用于分析颗粒的系统中使用的各个薄膜加热器元件的俯视图和截面视图。
图10A至图10C展示了基于谐振的颗粒检测器的透视图和截面视图。
图11A至图11B展示了用于分析空气流中的颗粒的系统的操作。
图12A至图12B展示了用于分析空气流中的颗粒的系统的俯视图和侧视图。
图13A至图13B展示了用于分析颗粒的系统的透视图和侧视图。
图14A至图14D展示了具有矩形空气通道的用于分析空气流中的颗粒的系统和其操作的俯视图和侧视图。
图15A至图15D展示了具有膨胀空气通道的用于分析空气流中的颗粒的系统和其操作的俯视图和侧视图。
图16展示了包括离心式颗粒分离器级的用于分析空气流中的颗粒的系统的俯视图。
图17A至图17B展示了具有变宽的空气通道和变窄的通道高度的用于分析颗粒的系统的俯视图和侧视图。
图18A至图18B展示了用于使用鞘空气分析空气流中的颗粒的系统的俯视图和侧视图。
图19展示了用于使用管状鞘空气级分析空气流中的颗粒的系统的透视图。
图20展示了用于使用平面鞘空气级分析空气流中的颗粒的系统的透视图。
图21展示了具有空气通道并且在柔性组件中提供两个平面缓冲进口空气流的等速进口的局部剖视图。
图22展示了具有空气通道并且在柔性组件中提供四个缓冲进气流的等速进口的局部剖视图。
图23A至图23B展示了具有带有变化的截面几何形状的矩形空气通道的热泳颗粒检测系统的俯视图和侧视图,该热泳颗粒检测系统包括膨胀级和压缩级以及一对延伸穿过颗粒集中器和颗粒鉴别器的多抽头加热器元件。
图24展示了用于分析空气流中的颗粒的系统的框图。
图25示出了用于分析空气流中的颗粒的方法的框图。
具体实施方式
本文披露的技术、方法、设备和系统可以产生更小、更简单和成本更低的空气传播性颗粒检测和监测设备,这些设备允许在住宅、建筑物、工作场所环境、工业设施、室内和室外环境以及个人空气质量监测器中进行大众市场使用。改进的空气传播性颗粒检测系统和方法可以用于各种设备,包括手机、智能电话、膝上型计算机和平板计算机、恒温器、声控桌面监测器、可穿戴设备(比如手表和个人健康监测器)、用于绿色建筑和家庭自动化系统的空气监测器、车厢监测、烟雾检测器和保护设备(比如面罩和眼镜)以及其他应用。
被配置成使用热泳力的系统和方法可以促进改进的空气颗粒监测设备。通过采用合适的热梯度,这种系统和方法可以产生对这种改进的设备有用的各种效果。这些效果可以包括集中和聚焦颗粒物质、根据大小对颗粒物质进行筛分以及以受控方式将各种大小的颗粒物质引导到一个或多个合适的颗粒传感器上,比如基于谐振的MEMS传感器或其他设备。
热泳力通常是指在存在热梯度的情况下可以施加在小颗粒(比如悬浮在气体或流体介质中的微米和亚微米大小的颗粒)上的力。如果没有热梯度(也被称为“温度梯度”或“热量梯度”),悬浮颗粒会经历正常的随机布朗运动。在存在热梯度的情况下,气体或流体介质中能量更高的分子可能会相对于颗粒的一侧撞击颗粒的另一侧,从而在颗粒上产生净力,该净力根据颗粒直径、温度梯度、气压、颗粒温度和比如颗粒的热导率和热容量等其他变量而变化。这种热泳力进而可以将热泳速度赋予这种颗粒,该热泳速度根据热梯度、气体粘度、气体密度以及颗粒的大小和组成而变化。热泳力可以用于将颗粒集中在空气流的内部区域中并且选择性地将颗粒偏转朝向合适的颗粒检测器以进行检测和分析。
鞘空气级可以与空气通道一起包括用于在进入热泳颗粒集中器和热泳颗粒鉴别器之前预集中颗粒。替代性地,鞘空气级可以放置在颗粒集中器之后,以在颗粒鉴别器之前进一步集中空气流中的颗粒。鞘空气或其他鞘气可以被注入到空气样本中颗粒物的中心核周围的鞘中,并且在压缩级的锥形空气通道中压缩以聚焦颗粒物,从而有助于热泳聚焦和颗粒检测。具有变宽空气通道的气流膨胀级可以明显减慢空气流中的空气和颗粒的速度,以实现更有效的颗粒偏转和收集。空气通道的高度可以向下逐渐变细,以缩小高度并增加热梯度的量级,以生成更高的热泳力并提高颗粒检测效率。空气通道几何形状的其他变化可能导致空气传播性颗粒的收集和检测的其他改进。
虽然本文披露的实施例通常是指用于分析空气流中的颗粒的系统和方法,“空气”虽然涵盖正常的地球大气,但可以是横穿空气通道的任何类型的气体或流体。空气流中的颗粒通常是指悬浮在空气流中并且通常不同于包括载气的较小气体分子或原子的具有多种粒度和组成的微米或亚微米大小的颗粒。微米(也被称为“μm”)是等于一微米或百万分之一米的长度单位。
下文各个图中的类似编号的元件适用于类似的元件。尽管附图旨在是说明性的,但为清楚起见,附图中所示的各个元件的尺寸和特征并不总是按比例绘制。
图1示出了用于分析空气流中的颗粒的系统100的简化框图。系统100包括进口110、颗粒集中器120和颗粒鉴别器130。一组数据和控制信号140可以用于通信、发送和接收数据以及控制系统100。进口空气流112可以包括颗粒物,该颗粒物可以由颗粒集中器120集中,并且然后由颗粒鉴别器130和相关分析部件偏转、收集、检测和分析。出口空气流118可以包括从进口110吸入的没有由颗粒鉴别器130收集的颗粒的空气。
在一些实施方式中,系统100可以有线或无线地耦接到手机、智能电话、膝上型计算机或其他计算机化设备,以使系统100或计算机化设备内的一个或多个处理器能够处理来自系统100的数据并且产生颗粒物含量的时间和空间测量(如果使用多个这种系统的话)。在一些实施方式中,系统100可以通信地耦接到数据中心或云计算环境中的一个或多个处理器以执行颗粒物数据的数据处理并且提供从系统100获得的颗粒物数据的结果。
图2展示了分析横穿用于分析空气流中的颗粒114的系统200的颗粒的方法。穿过进口110的进口空气流112中的颗粒114被吸入穿过被一个或多个通道壁104包围的空气通道102(也被称为“流动通道”)。在没有任何聚焦或集中的情况下,颗粒114通常沿一个或多个流线108跟随空气通道102中的空气流106(也被称为“流动流”)。被施加的力(比如热泳力或重力)偏转的颗粒可以在施加的力的方向上背离特定流线108偏转。
空气传播性颗粒114可以具有不同的大小和形状并且包括不同的物质或各种物质的聚集体。进口空气流112处的各种类型的空气传播性颗粒114被描绘并且标记为1至8,表示较大的球形颗粒1和5、较小的球形颗粒2和6、纤维状颗粒3和7以及破碎颗粒4和8。当这些颗粒114横穿空气通道102时,来自颗粒集中器120中的加热器元件122a、122b(也被称为“加热元件”或“聚焦加热器”)的热泳力可以迫使颗粒114背离空气通道102的靠近通道壁104的外周并朝向空气通道102的内部区域220,该内部区域可以在空气通道102的几何中心处或附近。热泳颗粒集中器加热器元件122a、122b可以用于将进入的颗粒114聚焦成更紧密的束以促进分析。集中在空气通道102的内部区域220中的颗粒114可以沿一个或多个流线108朝向颗粒鉴别器130前进。
颗粒鉴别器130可以包括一个或多个加热器元件132(也被称为“沉淀加热器”或“偏转加热器”),用于偏转颗粒并将颗粒收集到与加热器元件132相对的壁104或颗粒检测器134上。颗粒114可以被由热泳颗粒鉴别器加热器元件132生成的热梯度偏转并且被引导朝向壁104附近的颗粒检测器134,其中,可以将所选粒度范围内的颗粒收集到颗粒检测器134的表面136上。收集的颗粒116可能引起颗粒检测器134的谐振频率的移位,该移位可以被校准以确定在表面136上收集的质量的量。特定大小范围内的颗粒114的筛分、收集、检测和分析部分地取决于大小相关和组成相关的热泳力以及进入的颗粒114的初始高准直和预聚焦流。未收集的颗粒可以沿一个或多个流线108沿着空气通道102继续向下并且经由出口空气流118离开。
图3展示了热泳颗粒集中器120的元件和操作。热泳颗粒集中器120可以包括至少一对热泳颗粒集中器加热器元件122a、122b,该一对热泳颗粒集中器加热器元件定位于颗粒集中器120内的空气通道102的外周附近。颗粒集中器120可以包括空气通道102,该空气通道具有允许颗粒114和空气流106横穿空气通道102的用于进口空气流112的第一开口端和用于出口空气流118的第二开口端。空气通道102可以被至少从第一开口端延伸到第二开口端的一个或多个通道壁104封闭。两个或更多个加热器元件122a、122b可以定位于第一开口端与第二开口端之间。加热器元件122a、122b可以定位于空气通道102的外周附近并且被协作地配置成以热泳方式迫使空气流106中的颗粒114背离外周并朝向空气通道102的内部区域320。
可以沿空气通道102的长度生成位置相关的热轮廓以将颗粒114驱动朝向空气通道102的中心,同时以其他方式允许空气流106保持不受干扰。当加热器元件122a、122b被加热并且生成从加热器元件122a、122b发出的热梯度时,空气流106中的颗粒114可以以热泳方式被迫使朝向空气通道的内部区域320。等温线324a、324b示出了空气流106内的恒温线。随着施加到加热器元件122a、122b的功率改变并且随着空气流106的速度被调整,等温线324a、324b的位置和形状可以改变。当空气流106中的颗粒114横穿空气通道102时,可以生成热泳力326a、326b并且这些热泳力作用于颗粒114。热泳力326a、326b随着空气通道102中的热梯度增加而增加,并且在热减少最快的方向上作用于颗粒114,即,在垂直于等温线324a、324b的方向上,并且其中量级与空气流106中的温度梯度成比例。当受到由空气流106中的热梯度生成的热泳力326a、326b的作用时,颗粒114可能被迫背离外周并朝向空气通道102的内部区域320。颗粒114可以跨流线108朝向空气通道102的中心偏转,从而增加空气通道102的内部区域320中颗粒114的浓度。在一些实施方式中,当颗粒114在空气通道102中向下游继续时,可以改变加热器元件122a、122b的温度以控制内部区域320内的集中颗粒114的位置。
尽管颗粒集中器120(和颗粒鉴别器130)的内部区域320通常以空气通道102的几何中心为中心并且包括空气通道102的在几何中心附近的部分,但在一些实施方式中,内部区域320可以绕偏离空气通道102的中心线的轴线居中。内部区域的尺寸通常在颗粒检测器134的有源传感器区的宽度和/或长度的数量级上,该数量级可以是200微米或更少。由于颗粒筛分和收集随着空气流106的内部区域中颗粒的更紧密分布而改进,因此设备性能随着更紧密的颗粒分布而改进。在一些实施方式中,内部区域可以被限定为空气流106中的简单大多数空气传播性颗粒114集中在其中的空间体积。在一些实施方式中,内部区域可以被限定为通道体积的百分比,比如通道体积的1%、2%、5%、25%或50%。在一些实施方式中,内部区域可以包括空气通道的几何中心和围绕几何中心的面积的百分比,比如在沿空气通道的中心线的点处的截面面积的1%、2%、5%、25%或50%。
图4展示了热泳颗粒鉴别器130的元件和操作。颗粒鉴别器130(有时被称为沉积室或沉降室)包括空气通道102,该空气通道具有包含空气流106的一个或多个通道壁104。颗粒鉴别器130中的空气通道102可以从进口110延伸穿过颗粒集中器120并且穿过颗粒鉴别器130。颗粒鉴别器130可以流体耦接到颗粒集中器120和进口110。空气通道102中的颗粒114可以集中在颗粒集中器120内的空气流106的内部区域中,并且然后经由流体耦接的空气通道102进入到颗粒鉴别器130中。
颗粒鉴别器130可以包括至少一个热泳颗粒鉴别器加热器元件132。加热器元件132可以被配置成将空气流106的内部区域中的颗粒114偏转朝向包围空气流106的空气通道102的外周壁104。空气通道102中的由加热器元件132生成的热梯度可以在垂直于空气流106的方向上以热泳方式迫使颗粒114朝向外周壁104。等温线434a、434b示出了恒温线。等温线434a、434b的位置和形状可以随着施加到加热器元件132的功率变化而变化并且随着空气流106的速度被调整而变化。
当颗粒114进入颗粒鉴别器130时,由颗粒鉴别器130中的一个或多个加热器元件132生成的热泳力可以迫使颗粒114朝向空气流106的靠近颗粒鉴别器130的通道壁104之一的外周。当空气流106中的颗粒114横穿空气通道102时,可以生成热泳力436a、436b并且这些热泳力作用于颗粒114。热泳力436a、436b随着空气通道102中的热梯度增加而增加并且在温度相对于位置的最大降低的方向上作用于颗粒114。当受到由空气流106中的热梯度生成的热泳力436a、436b的作用时,颗粒114被迫使背离空气通道102的内部区域并朝向外周壁104。
颗粒114可以背离空气通道102的内部区域并朝向定位于空气通道102的外周壁104上的颗粒检测器134偏转。颗粒检测器134可以被配置成收集从空气流106的内部区域偏转的颗粒114。经偏转的颗粒114可以被收集到颗粒检测器134的表面136上,在该表面上可以检测和分析收集的颗粒116。空气流106中的较小颗粒可以以与空气流中的较大颗粒不同的速率选择性地背离空气流106的内部区域并朝向外周偏转。颗粒可能会经受面积相关的粘性力和阻力以及密度和体积相关的重力。例如,较重的颗粒可以以比类似大小的较轻的颗粒更高的速率被重力选择性地偏转。
可以控制施加到颗粒鉴别器130的加热器元件132的功率(例如电功率)以在空气通道102中生成和控制热梯度,从而将所选粒度范围内的颗粒114偏转到颗粒检测器134的表面136上。所选粒度范围可以包括介于约0.01微米与0.1微米之间、0.01微米与0.3微米之间、0.1微米与1.0微米之间、1.0微米与2.5微米之间、2.5微米与10.0微米之间以及10.0微米与更大之间的粒度范围,或其他感兴趣的粒度范围。未被颗粒鉴别器130收集的颗粒114可以沿一个或多个流线108向下游继续并穿过出口空气流118。在一些实施方式中,施加到加热器元件132的功率(例如电流)可以被抖动、调节或以其他方式改变以更均匀地散布收集的颗粒116在颗粒检测器134的表面136上的分布。在一些实施方式中,施加到加热器元件132的功率可以适时顺序地变化以在第一时间段期间收集和分析第一大小的颗粒,然后在第二时间段期间收集和分析第二大小的颗粒,等等。
图5展示了筛分和鉴别空气流106中的集中颗粒114的方法。示出了具有空气通道102和包围空气通道102和空气流106的通道壁104的颗粒鉴别器130的截面视图。来自进口空气流112的集中在空气流106的内部区域中的颗粒114可以利用颗粒鉴别器130中的一个或多个加热器元件132朝向空气通道102的外周壁104偏转。颗粒可以利用由加热器元件132生成的热梯度偏转,其中空气流106中的较小颗粒552、554以比空气流中的较大颗粒556、558更高的速率背离空气流106的内部区域并朝向外周偏转。各种颗粒的横向位移量的变化量可以大致与空气传播性颗粒的大小相反地变化。即,大小较小的颗粒通常比大小较大的颗粒偏转得更多。与在热泳力影响下的较大颗粒相比,在相同影响下的较小颗粒的轨迹更容易改变,从而允许局部颗粒检测器区分不同粒度。偏转速率也可以是经偏转的颗粒的质量、热导率、表面积和其他性质的函数。例如,可以以与密度较小的颗粒不同的速率选择性地偏转类似大小的较密的颗粒。
多个颗粒检测器134a、134b、134c可以定位于颗粒鉴别器130的通道壁104上以允许收集和检测一个或多个粒度范围内的颗粒。较轻(较小)的颗粒可以由第一颗粒检测器134a收集,并且较重(较大)的颗粒可以由第二颗粒检测器134b或第三颗粒检测器134c收集,从而允许颗粒鉴别器130区分不同粒度。用于这种大小筛分和鉴别的物理机制采取空气通道102内的颗粒物流的某种形式的预聚焦或集中,以防止给定的颗粒检测器134a、134b、134c收集来自样本空气流106中的不同高度或位置的不同粒度的混合物。在不存在用于将颗粒114集中成束的主动措施的情况下,颗粒114可以分布在空气通道102的整个竖直轮廓中。因此,定位于空气通道102的底部附近的大颗粒114可能会偏转到第一颗粒检测器134a上,而在空气通道102的顶部附近的较小颗粒114可能会偏转到第二颗粒检测器134b上,从而干扰颗粒鉴别器130区分不同粒度或其他颗粒性质的能力。
可以控制加热器元件132的功率以允许将特定粒度范围内的经偏转的颗粒收集到颗粒检测器134a、134b、134c之一的表面上。如图5所展示的,可以将较小的颗粒552’收集到颗粒检测器134a上;可以将稍微较大的颗粒554’收集到颗粒检测器134b上;可以将较大的颗粒556’收集到颗粒检测器134c上;并且最大的颗粒558’可以保持未被收集并且沿空气流106继续穿过出口空气流118,从而有效地生成用于颗粒收集的截止点。
图6示出了跨空气通道的颗粒位置与沿具有热泳颗粒集中器120和热泳颗粒鉴别器130的空气通道的距离的绘图600。空气流中的最初跨通道高度均匀分布的颗粒进入颗粒集中器120,并且如先前所描述的被加热器元件122a、122b迫使朝向空气流的内部区域。集中颗粒横穿空气通道朝向颗粒鉴别器130。颗粒鉴别器130相对于颗粒集中器120定位于空气流的下游方向。
在正常大气压下,较小的颗粒(比如大小在约2.5微米以下的颗粒)受重力影响最小。这些颗粒往往由于重力以最小偏转移动穿过空气通道。在没有任何其他力的情况下,这些颗粒几乎与空气通道中的周围空气遵循相同的路径。为了检测和测量悬浮的气溶胶颗粒,可以将沉淀热泳力施加到颗粒以充分偏转颗粒的轨迹,使得可以将颗粒推动朝向一个或多个颗粒检测器134a、134b、134c、134d的表面并且收集到该表面上。
颗粒鉴别器130可以具有至少一个加热器元件132和布置在空气通道的与加热器元件132相对的壁上的颗粒检测器134a、134b、134c、134d的阵列,这些颗粒检测器被配置成收集经偏转和经筛分的颗粒。较轻和较小的颗粒632可以以较高的速率偏转并且被颗粒检测器134a收集。较重和较大的颗粒634可以以较低的速率偏转并且被颗粒检测器134d收集。仍较重和较大的颗粒636可以保持未被收集并且可以沿空气通道通过,其中这些颗粒可能被作用于颗粒的重力向下偏转。
小于特定截止大小(比如直径为2.5微米)的颗粒可以由颗粒鉴别器130选择性地收集和分析,并且大于截止大小的颗粒可以继续通过颗粒鉴别器130。截止点上方的在空气通道外周附近的较重和较大的颗粒636可能经历比空气通道中心附近的颗粒更低的局部空气速度,从而允许重力有更多时间作用于较重的颗粒。颗粒鉴别器130的重力影响和取向可以影响截止大小。
因为可以使热泳力远大于重力,至少对于大小小于约10微米的颗粒,所以颗粒传感器可以被配置在空气通道的几乎任何表面上,包括空气通道的(相对于重力)地板、天花板或侧面。尽管在本披露内容中主要讨论了安装在地板和天花板上的颗粒检测器,但这并不旨在是限制性的。考虑到沉淀加热器可能对颗粒轨迹的影响相对较大,颗粒传感器也可以安装在空气通道的侧面(相对于重力)或根据需要倒置。
在一些实施方式中,热泳颗粒检测系统可以配置有定位于第一级下游的一个或多个颗粒集中器120和颗粒鉴别器130附加级。热泳力作用于较小的颗粒,并且以比空气流中的较大的颗粒更快的速率偏转较小的颗粒。第一级允许空气流中的颗粒集中并收集第一粒度范围内的颗粒,同时使第一范围之外的颗粒通过。第二级允许重新集中和重新聚焦空气流中剩余的颗粒,并且随后收集具有比第一级更大的粒度范围的第二范围内的颗粒。可以添加具有成对的颗粒集中器120和颗粒鉴别器130的附加级。每个级可以包括颗粒集中器120中的一个或多个聚焦加热器和颗粒鉴别器130中的一个或多个偏转加热器和颗粒检测器,以将较大的颗粒重新引导朝向空气通道的中心,这些较大的颗粒可以被重新集中和重新偏转用于附加收集和分析。在一些实施方式中,多个颗粒集中器和鉴别器级允许进一步分离基于谐振的颗粒检测器,从而产生改进的声学隔离和检测器之间的较少的机械耦接,以改进灵敏度。
图7示出了用于分析空气流中的颗粒的系统700的框图。系统700包括进口110、流体耦接到进口110的颗粒集中器120和流体耦接到颗粒集中器120的颗粒鉴别器130。进口110、颗粒集中器120和颗粒鉴别器130包括延伸穿过进口110、颗粒集中器120和颗粒鉴别器130的空气通道102,用于包含空气流106。空气通道102包括一个或多个通道壁104,用于包含空气流106。一个或多个加热器元件122a、122b可以定位于热泳颗粒集中器120内的空气通道102的相对侧上。一个或多个加热器元件132可以定位于颗粒鉴别器130内的空气通道102的通道壁104上。一个或多个颗粒检测器134可以定位于颗粒鉴别器130的与加热器元件132相对的壁104上以收集和检测颗粒。颗粒检测器134可以包括一个或多个压电层734,其中压电层734的每一侧具有电极层732、736。
系统700可以包括一个或多个控制器150。控制器150可以包括一个或多个处理器,该一个或多个处理器被配置成允许将颗粒114集中在颗粒集中器120内的空气流106的内部区域,并且利用在空气通道102中生成和控制的热梯度使颗粒鉴别器130内的空气流106中的集中颗粒114偏转。控制器150可以包括各种电子电路、无源设备、金属迹线、电互连件和导线,用于向加热器元件122a、122b、加热器元件132和颗粒检测器134发送信号并从其接收信号。还可以提供用于控制器150的电源和接地连接。
控制器150可以包括用于在谐振模式下操作颗粒检测器134并且检测谐振频率的变化的电路系统。该电路系统可以包括信号放大器和前置放大器、信号调节电路系统(比如滤波器、混频器、本地振荡器、解调器、锁相环、计数器、A-D(模数)转换器、除以n电路)以及用于确定与颗粒检测器134的表面上收集的颗粒的质量负载相关联的频移的控制电路系统。控制器150可以包括用于处理来自颗粒检测器134的数据并且分析收集的颗粒的性质的处理电路系统。
空气流106中的较小颗粒114可以以比空气流106中的较大颗粒114更高的速率选择性地背离空气通道102的内部区域并朝向空气流106的外周偏转。控制器150可以被配置成允许控制生成的热梯度以将所选粒度范围内的颗粒偏转到颗粒检测器134的表面136上。控制器150可以被配置成吸入空气并且控制空气流106在空气通道102中的空气流速度。控制器150可以被配置成允许将所选粒度范围内的颗粒114收集到颗粒检测器134的表面136上。控制器150可以被配置成确定在颗粒检测器134的表面136上收集的颗粒114的有效质量。控制器150可以被配置成生成所选粒度范围内的颗粒114的气溶胶质量浓度估计,并且经由数据和控制信号140将生成的气溶胶质量浓度估计提供或发送到另一个定位。控制器可以被配置成校正或补偿温度、相对湿度、环境压力和其他因素。控制器可以被配置成使用存储计算机可读程序代码的非暂态计算机可读介质以这些方式进行操作,该计算机可读程序代码由与控制器相关联的至少一个处理器执行,以通过使用包括相关程序指令的相关程序代码来分析空气流中的颗粒。
图8描绘了用于分析空气流106中的颗粒的系统800的分解视图。系统800包括具有进口端口812的进口110,该进口端口具有用于进口空气流112的开口端814。系统800可以包括具有用于出口空气流118的开口端816的出口端口818。空气通道102可以包围空气流106并且从开口端814延伸到开口端816。开口端814和816的大小和形状可以根据设备和应用而变化。例如,圆形开口端814和816的直径可以介于约30微米与约50毫米之间。矩形开口端814和816的宽度可以介于约30微米与约50毫米之间,并且高度介于约30微米与约50毫米之间。
热泳颗粒集中器120可以具有定位于空气通道102的相对侧上的两个加热器元件122a、122b。热泳颗粒鉴别器130可以具有定位于空气通道102一侧上的一个或多个加热器元件132和定位于空气通道102的相对侧上的颗粒检测器134。在图8所示的实施方式中,空气通道102是圆形的,并且加热器元件122a、122b和132沿通道壁的圆周在基本上垂直于在空气通道102中流动的空气流106的方向上定位。当加热器元件122a、122b被加热并且生成从加热器元件122a、122b发出的热梯度时,空气流106中的颗粒可以以热泳方式被迫使朝向空气通道102的内部区域820。加热器元件122a、122b和加热器元件132可以包括一个或多个薄膜加热器元件、电阻膜、电阻片段、加热器导线或其他加热器类型。出于经济和封装原因,相同的加热器类型可以用于颗粒集中器120和颗粒鉴别器130中的任一个或两者中,但是根据其用作聚焦加热器或沉淀加热器的用途,每个加热器通常将在不同温度下操作。操作温度可以部分地根据加热器元件的形状和放置、加热器元件的电阻率和施加的功率而变化。热泳颗粒集中器120中的加热器元件的操作温度通常介于高于环境温度约20摄氏度与50摄氏度之间。热泳颗粒鉴别器130中的加热器元件的操作温度通常更高,并且通常介于高于环境温度约50摄氏度与200摄氏度之间以有效控制颗粒移动。加热器元件122a、122b和132的温度和由此生成的热梯度可以通过控制施加到每个加热器元件的电功率(比如通过控制通过加热器元件的电流量或通过控制跨加热器元件的端子施加的电压)来控制。
一个或多个带状加热器元件822a、822b可以定位于进口端口812的各部分上或周围。带状加热器元件822a、822b允许圆形或矩形进口端口812被绕整个进口壁104延伸的加热器元件围绕。带状加热器元件822a、822b可以配置有布置在空气通道102的相对侧上的加热器片段,该空气通道包围空气流106。施加到进口加热器元件822a、822b的功率(例如电功率、电流)可以生成作用于入射空气流106中的颗粒的热泳力,从而迫使颗粒背离空气通道102的壁104朝向空气流106的内部区域820并开始颗粒集中过程。空气流106中的颗粒的进一步集中可以发生在进口空气流112下游的热泳颗粒集中器120中。由带状加热器元件822a、822b生成的温度可以低至高于环境温度几度,以阻止颗粒被收集到进口端口812的表面上。带状加热器元件822a、822b可以被配置成在使用期间控制或限制空气通道102中的湿气或湿度水平。
可以利用耦接到系统800的一个或多个电连接器和信号线将数据和控制信号140传送到系统800并从该系统传送。空气通道102包括一个或多个通道壁104。空气通道102的侧面通常被壁104围绕,除了在用于进口空气流112和出口空气流118的开口端处。至少一个颗粒检测器134可以沿壁104定位并且被配置成使得空气传播性颗粒在被沉淀加热器元件132产生的沉淀热梯度横向推进之后,可以被颗粒检测器134检测到。
虽然热泳颗粒鉴别器130通常用作本文所包含的各种描述中的示例性实施例,但其他检测设备和方法比如通过激光散射操作的颗粒传感器也是可能的并且本披露内容不否认。本文描述的实施例可以与许多不同类型的颗粒传感器一起操作。基于MEMS的颗粒传感器,并且特别是FBAR传感器或FBAR传感器的可寻址阵列被呈现为可以使用的特定类型的颗粒检测器。
空气或其他载气可以通过空气通道102被吸入,其中空气移动设备(未示出)通常定位于出口空气流118的下游以生成空气流106。空气移动设备可以包括泵、鼓风机、风扇、涡轮机、机动进气设备、波纹管泵、隔膜泵、蠕动泵、活塞泵、容积泵、旋片泵、文丘里设备、气流管理设备或用于通过空气通道102移动或吸入空气的其他空气吸入装置。在一些实施方式中,系统800中的进口空气流112的空气速度可能是足够的,而无需通过使用被动气流机制(比如环境气流、跨空气通道的长度的环境压降或对流热过程)来生成主动气流。
颗粒过滤器(未示出)和保护筛网可以在颗粒集中器120的上游用于过滤掉特别大的颗粒并且保护空气通道102免于积累不期望的碎片。在一些实施方式中,大小选择性颗粒过滤器或大小选择性输入设备可以作为进口110的一部分被包括或放置在进口110的上游。在一些实施方式中,空气通道102的壁104可以以提供改进的热隔离的方式被机械地支撑和安装。在一些实施方式中,空气通道102可以悬浮在提供良好机械鲁棒性和良好热隔离的气凝胶中。
图9A至图9I展示了供用于分析颗粒的系统中使用的各个薄膜加热器元件的俯视图和截面视图。图9A中所示的薄膜加热器元件900包括薄加热器层910,比如图案化的镍、铬镍或铂层。电接合焊盘940和950允许分别经由加热器接触区域944和954电连接到加热器层910。一个或多个电迹线946可以用于促进接合焊盘940与接触区域944之间的电连接。类似地,一个或多个电迹线956可以用于促进接合焊盘950与接触区域954之间的电连接。通过图9A中的虚线AA’截取的图9B中所示的说明性截面视图示出了定位于比如二氧化硅或氮化硅层的两个绝缘层912与916之间的加热器层910。加热器层910可以定位于加热器基板920中限定的空腔区域918上方以减少通过加热器基板920的功率损耗。键合线942和952、或其他连接布线可以分别用于连接到接合焊盘940和950。
图9C示出了具有以蛇形方式图案化的加热器层910的薄膜加热器元件900,该加热器元件具有彼此串联连接并且电连接到电接合焊盘940和950的各个加热器片段922a至922f。薄膜加热器元件的替代性实施方式包括在聚酰亚胺膜背衬(比如具有图案化电极的卡普顿胶带)或其他微制造加热器元件(比如在熔融石英基板上形成的多晶硅加热器元件)上形成为电连接的蛇形加热器片段的金属箔。在一些实施方式中,比如高电阻率导线、热管、辐射加热或感应加热等其他热源可以用于生成热梯度。
图9D展示了具有可以用作空气通道的通道壁的聚合物阻挡层904的隔热壁装式薄膜加热器元件900的截面视图。图9D中的壁装式薄膜加热器元件900在空气通道中未呈现任何结构特征,除了聚合物阻挡层904的相对平滑的外表面,这最小化了空气流中任何气流中断的水平。薄加热器层910可以单独地形成在塑料加热器基板920上并且用粘合剂层906(比如可UV固化的粘合剂或环氧树脂)层压或以其他方式附接到阻挡层904。加热器层910可以分别利用一个或多个电迹线946和956电连接到接合焊盘940和950。接合焊盘940和950可以利用各向异性导电膜(ACF)980通过包括在柔性印刷电路板960(也被称为“柔性件(flex)”)中的一个或多个电镀柔性通孔966和介电层968附接到在一个或多个互连层962、964上形成的电互连件。所示的在柔性层970之一中具有切口区域的构造在加热器层910与底层柔性层972之间生成空腔区域918,该空腔区域允许更高水平的热隔离和更低的操作功率以实现相同的操作温度。可以在柔性印刷电路板960的底层柔性层972、974中形成附加空腔区域(未示出)以实现附加热隔离。薄膜加热器层910的热隔离可以产生改进的温度控制、较小的温度变化和较低的操作功率。空腔区域918可以填充有气凝胶或其他热绝缘材料以提供除热隔离之外的机械强度。
图9E展示了多抽头薄膜加热器元件900的俯视图。图9E中的多抽头薄膜加热器元件900可以附接到聚合物阻挡层,该聚合物阻挡层进而可以用作空气通道的通道壁。加热器层910可以布置在塑料加热器基板920上并且经由接触区域944、954和电迹线946、956等电连接到接合焊盘940、950。两个相邻加热器抽头之间的每个加热器片段922g至922r可以由跨每个片段施加的电压单独控制,以允许控制相邻空气流106中的温度轮廓。相邻加热器抽头之间的电压可以根据需要升高或降低电压电平,以控制施加到相邻加热器抽头之间的加热器片段的功率。将跨任何两个相邻加热器抽头的电势差设置为零使两个相邻加热器抽头之间的热生成减少到零,从而允许沿多抽头加热器元件的长度进行温度带控制和流量相关的温度分布。与单独抽头加热器元件相比,多抽头加热器元件需要更少的电连接,并且允许间隔更近且连续的加热器片段以改进温度轮廓控制。一对或多对多抽头加热器元件可以形成在加热器基板920上。任何两个加热器抽头之间的加热器片段可以形成为包括直线片段、弯曲片段、成角度片段、锥形片段、蛇形片段和具有不同宽度的片段的多种形状中的任一种。一个或多个短截线加热器片段922l、922r可以包括在具有独立电接入的基板920上,以允许对空气流106中生成的温度轮廓和热梯度进行附加控制。
图9F至图9I示出了具有热耦接散热器的各个薄膜加热器元件900的俯视图。散热器是当附近的热耦接加热器元件或加热器片段被加热时会发热的导热结构。散热器可以加热到通常低于相关加热器元件的温度的温度,从而在空气流106经过加热器元件和散热器时,允许对跨空气通道102的温度分布进行改进的控制。散热器可以负载电流或可以不负载电流,并且主要是无源设备。虽然散热器可以机械和电连接到加热器元件并且在一些实施方式中由与加热器元件相同的材料形成,但是散热器可以是与加热器元件电隔离但足够接近以从加热器元件提取热能并且将热能重新分布到整个空气通道的其他部分的完全无源设备。散热器的数量和形状可以因加热器而变化或在同一空气通道内因片段而变化。例如,一对三角形散热器938a、938b可以热耦接到定位于空气通道102的通道壁104附近的加热器片段922s、922t,以选择性地加热流动通过空气通道102的空气流106中的空气或其他气体,如图9F所示。所如图9G所示,尖峰形状散热器938c、938d、938e、938f阵列等可以热耦接到加热器片段922u、922v。如图9H所示,跨空气通道102延伸到加热器片段922w、922x的热耦接散热器938h在加热器片段922w、922x之间可以是锥形的或以其他方式形成轮廓。散热器938i可以在相关联的加热器片段922y、922z之间延伸并重叠,如图9I所示。加热器抽头928a至928p可以提供与图9F至图9I中所示的每个加热器元件或加热器片段的电连接。一个或多个无源金属热分流器(未示出)可以配置在多层柔性印刷电路板的一个或多个层上,以用作热负载并且改变动态温度响应,从而在空气通道中产生更高和更受控的热梯度。可以包括一个或多个散热片(未示出),用于沿空气通道的一个或多个部分维持期望的温度,比如环境温度。
各个散热器、短截线加热器、热分流器和散热片可以与一个或多个多抽头薄膜加热器元件和控制电子器件组合,以在空气通道中生成期望的热梯度,用于聚焦、集中、偏转和收集空气流中的颗粒。利用对来自各个散热器、短截线加热器、热分流器、散热片、加热器片段和加热器元件的热场的控制,在空气流中生成的热势阱可以有效地控制和捕获空气流106中的颗粒以进行检测和分析。
图10A至图10C展示了基于谐振的颗粒检测器134的透视图和截面视图。基于谐振的颗粒检测器134可以是声谐振器设备,比如石英晶体微天平或具有暴露于空气或气体传播性颗粒的表面的薄膜体声谐振器。在谐振器的表面上收集的颗粒可能会改变谐振设备的谐振频率。由于附加质量负载而引起的谐振频率的变化可以以电子方式检测。谐振设备可以在介于几兆赫兹与几千兆赫兹之间的频率范围内操作,该谐振设备具有随着质量的添加而通常向下移位的几赫兹数量级的可检测频移。
颗粒检测器134可以包括体声波(BAW)谐振器、薄膜体声波谐振器(FBAR)、固态安装式谐振器(SMR)、石英晶体微天平(QCM)、壁装式颗粒检测器、飞行时间检测器、谐振传感器、电容式传感器、红外传感器、光学传感器、UV传感器或颗粒质量检测器中的一个或多个。在一些实施方式中,颗粒检测器可以包括这种传感器的一维或二维阵列,或超过一种类型的颗粒传感器。颗粒检测器可以定位于空气通道102的壁上或附近,并且可以布置在颗粒鉴别器130的加热器元件132之下或附近。在一些实施方式中,所选粒度范围内的颗粒可以在颗粒检测器134的表面136上被偏转和收集。颗粒检测器134可以用于确定在表面上收集的颗粒的有效质量和其他性质,比如气溶胶质量浓度估计。
在图10A的实施方式中,示出了基于FBAR的颗粒检测器134的描绘,该基于FBAR的颗粒检测器包括布置在基板1020上的接合焊盘1010a、1010b、1010c,其中FBAR 1030悬浮在空腔1038之上,并且收集的颗粒116的一部分处于FBAR 1030的表面136上。接合焊盘1010a、1010b、1010c可以用于进行到FBAR 1030的电连接,比如信号和接地。图10B中的FBAR 1030的截面视图示出了FBAR 1030的表面136上的收集的颗粒116。FBAR1030可以包括压电层堆叠,该压电层堆叠具有悬浮在空腔1038之上的压电层1034、上部电极1036和下部电极1032,其中FBAR 1030部分地悬浮在形成于基板1020中的空腔区域1038之上。空腔1038可以形成在压电层堆叠下方以改进声学隔离并且减少到基板1020的能量损失。比如二氧化硅或氮化硅层等一个或多个介电层1022、1024可以用于为接合焊盘1010a、1010b、1010c和定位于FBAR电极1032、1036与接合焊盘1010a、1010b、1010c之间的各个电迹线1046、1056提供电隔离。在一些实施方式中,电极1032、1036和电迹线1046、1056可以包括一个或多个铝或钼层。
图10C展示了具有可以用作空气通道的通道壁之一的聚合物阻挡层1004的声学隔离壁装式颗粒检测器134的截面视图。壁装式颗粒检测器134在空气通道中未呈现任何结构特征,除了聚合物阻挡层1004的相对平滑的外表面,这最小化了空气流中任何气流中断的水平。颗粒检测器134可以包括具有压电层堆叠的FBAR 1030,该压电层堆叠具有悬浮在基板1020中的空腔区域1038之上的压电层1034、上部电极1036和下部电极1032。一个或多个介电层1022可以用于为接合焊盘1010a、1010b和定位于FBAR电极1032、1036与接合焊盘1010a、1010b之间的各个电迹线1046、1056提供电隔离。FBAR 1030可以用粘合剂层1006(比如可UV固化的粘合剂或环氧树脂)层压或以其他方式附接到阻挡层1004。接合焊盘1010a和1010b可以利用各向异性导电膜(ACF)1080通过包括在柔性印刷电路板1060中的一个或多个电镀柔性通孔1066和介电层1068附接到在一个或多个互连层1062、1064上形成的电互连件。在两个柔性层1070和1072中以切口区域示出的构造在基板1020与底层柔性层1074之间生成空腔区域1018,该空腔区域允许颗粒检测器134的更高水平的机械和声学隔离。颗粒检测器134的机械隔离可能导致对增加的质量的改进的灵敏度以及与其他部件的更少的声学和机械耦接。
热泳颗粒检测系统可以包括一个或多个基于柔性的壁装式加热器元件(比如图9D中所示的加热器元件)和一个或多个基于柔性的壁装式颗粒检测器134(比如图10C中所示的颗粒检测器)。可以通过将基于柔性的加热器元件和基于柔性的颗粒检测器与合适的基于柔性的侧壁组合以形成具有连续、平滑的壁和表面的矩形空气通道来形成基于柔性的空气通道,该空气通道穿过进口、颗粒集中器和颗粒鉴别器。例如,一个或多个聚酰亚胺层可以与多层柔性组件组合并且用作聚合物阻挡层904和1004以及用作紧凑、低轮廓空气传播性颗粒检测器的空气通道的侧壁。
图11A至图11B展示了用于分析空气流106中的颗粒的系统1100的操作。图11A示出了具有进口110、热泳颗粒集中器120和热泳颗粒鉴别器130的系统1100的截面视图。以各种局部速度1112进入壁104之间的空气通道102的进口空气流112形成局部速度轮廓1114,该局部速度轮廓可以跨空气通道102的宽度、高度和长度而变化,但通常在空气通道102的中心附近具有较高的局部速度,该局部速度在空气通道102的壁104附近减小到几乎为零。
当颗粒集中器120的相对侧上的加热器元件122a、122b被加热时,在整个空气通道102中生成热梯度,这些热梯度进而生成垂直于等温线1124a、1124b并且总体上指向最陡峭的负热梯度的方向的热泳力1126a、1126b。空气流106中的颗粒可以被引导背离颗粒集中器120中的空气通道102的外周并朝向空气通道102的内部区域。
当颗粒鉴别器130的一侧上的加热器元件132被加热时,在整个空气通道102中生成热梯度,这些热梯度进而生成垂直于等温线1134a、1134b并且指向最陡峭的负热梯度的方向的热泳力1136a、1136b。空气通道102内的空气流106中的颗粒可以被引导背离颗粒鉴别器130中的空气通道102的内部区域并朝向空气通道102的外周。
如图11B所示,粒度增加的颗粒1152、1154、1156和1158以热泳方式被迫使朝向颗粒集中器120中的空气流106的内部区域,并且然后背离颗粒鉴别器130中的空气流106的内部区域偏转并朝向空气流106的外周,期中较小的颗粒比较大的颗粒经历更大的偏转。在图11B中,最小颗粒1152’被偏转并在颗粒检测器134之前撞击颗粒鉴别器130的壁104;小颗粒1154’撞击颗粒检测器134的表面并被收集到该表面上;大颗粒1156’未被颗粒检测器134收集并继续在空气流106中;并且最大颗粒1158’以比较小的颗粒更少的偏转继续在空气流106中。
图12A至图12B展示了用于分析空气流106中的颗粒的系统1200的俯视图和侧视图。系统1200包括进口110、热泳颗粒集中器120和热泳颗粒鉴别器130。热泳颗粒集中器包括处于通道壁104之间的空气通道102,该空气通道具有用于进口空气流112的第一开口端和用于出口空气流118的第二开口端。空气通道102被至少从第一开口端延伸到第二开口端的通道壁104封闭。两个或更多个加热器元件122a、122b可以定位于第一开口端与第二开口端之间并且定位于空气通道102的外周附近。空气通道102和通道壁104的垂直于空气流106的截面是矩形的,并且至少两个加热器元件122a、122b定位于通道壁104的两个相对侧上。加热器元件122a、122b的加热器片段1222a在基本上平行于空气流106的方向上沿通道壁104延伸。包括一个或多个加热器元件132和颗粒检测器134的颗粒鉴别器130在颗粒集中器120下游的方向上耦接到空气通道102。
图13A至图13B展示了用于分析颗粒的系统1300的透视图和侧视图。系统1300包括进口110、热泳颗粒集中器120和颗粒鉴别器130。热泳颗粒集中器120包括定位于空气通道102的外周附近的一对热泳加热器元件122a、122b。热泳加热器元件122a、122b被配置成以热泳方式迫使空气通道102中的空气传播性颗粒背离空气通道102和空气流106的外周并朝向其内部区域。通道壁104和空气通道102的截面几何形状可以是矩形的。通道壁104包括下壁1312、侧壁1314、1316和上壁1318的各部分。为清楚起见,图13A中所示的透视图去除了上壁1318。进口空气流112进入颗粒集中器120上游的通道壁104中的开口并且离开颗粒鉴别器130下游的通道壁104中的开口。热泳加热器元件122a、122b可以包括悬浮在具有加热器柱1326a、1326b的空气通道102中的一条或多条加热器导线1322a、1322b、1322c。在一些实施方式中,加热器导线1322a、1322b、1322c可以形成为金属丝网。替代性地,加热器元件122a、122b可以由处于电绝缘通道壁、天花板和地板的内表面上的薄的、部分导电的膜构造。电流可以通过加热器导线1322a、1322b、1322c发送以生成期望的热梯度。
加热器元件122a、122b的加热器导线1322a、1322b、1322c中的一条或多条可以相对于空气通道102在沿空气通道102并朝向空气流106的内部区域的向内方向成角度。热泳加热器元件122a、122b被配置成以热泳方式迫使空气通道102中的空气传播性颗粒背离空气通道102和空气流106的外周并朝向其内部区域。热泳加热器元件122a、122b允许将进口空气流112中的颗粒聚焦成具有更高颗粒浓度的更紧密的颗粒束。颗粒集中器120的区域中的空气通道102的一些尺寸可以变窄以进一步将颗粒引导成更窄的束。
系统1300包括具有至少一个加热器元件132的颗粒鉴别器130和至少一个颗粒检测器134,该至少一个颗粒检测器定位于颗粒集中器120下游的下壁1312上以收集和检测空气流106中的颗粒。加热器元件132可以包括悬浮在具有加热器柱1336a、1336b的空气通道102中的加热器导线1332。颗粒鉴别器130内的壁104的尺寸可以变窄以进一步集中颗粒并且增加导致作用在颗粒上的热泳力增加的热梯度的量级。在一些实施方式中,通道壁104在其他方向上的尺寸可以变宽以减慢空气传播性颗粒的速度并且允许热泳加热器元件132有更多时间将这些颗粒迫使并偏转到颗粒检测器134上。
在一些实施方式中,空气通道102的三维结构和/或各种单独控制的聚焦加热器和沉淀加热器的配置可以包括定位于空气通道102的顶部、底部和侧壁上的单独控制的聚焦和沉淀加热器,以生产更通用类型的气流颗粒检测设备。此设备可以根据本地状况和颗粒监测目标重新配置。通过使用合适的处理器和控制软件来控制各种加热器元件、颗粒检测器和气流管理设备的操作,可以促进这种重新配置。限制颗粒物的流动通道的有效形状可以是可编程的,以允许补偿比如气压、温度和湿度等各种环境变量的变化。
图14A至图14D展示了具有矩形空气通道102的用于分析空气流106中的颗粒的系统1400和其操作的俯视图和侧视图。空气流106从进口空气流112进入矩形空气通道102,横穿空气通道102穿过热泳颗粒集中器120和热泳颗粒鉴别器130,并且通过出口空气流118离开空气通道102。颗粒集中器120包括定位于空气通道102一侧上的一对加热器元件122a、122b和定位于空气通道102的相对侧上的另一对加热器元件。每个加热器元件122a、122b可以具有多个加热器片段1422a、1422b、1422c,其中加热器片段1422a和1422c在基本上平行于空气流106的方向上沿通道壁104延伸,并且加热器片段1422b在相对于空气流106成角度的方向上沿通道壁104延伸。流体耦接到空气通道102的颗粒鉴别器130包括加热器元件132,该加热器元件具有平行于空气流106延伸的加热器片段1432a和在垂直于空气流106的方向延伸的加热器片段1432b,用于集中和偏转空气流106中的颗粒114。多个颗粒检测器134a、134b、134c可以被包括在颗粒鉴别器130中,用于收集、检测和分析颗粒。横穿空气通道102的颗粒114可以集中在热泳颗粒集中器120内的空气流106的内部区域中。横穿热泳颗粒鉴别器130的颗粒114可以被偏转并收集到颗粒检测器134a、134b、134c之一的表面上以用于检测和分析。附加加热器元件(未示出)可以定位于下游颗粒检测器134b、134c上方以允许更好地控制空气通道102中生成的热梯度并且允许下游加热器元件在比上游加热器元件更高的温度下进行操作,使得通过第一颗粒检测器134a的较大颗粒可以被迫使到下游颗粒检测器134b、134c中的一个或多个上。
图15A至图15D展示了具有膨胀空气通道102的用于分析空气流106中的颗粒114的系统1500和其操作的俯视图和侧视图。颗粒114可以通过进入进口110的进口空气流112进入系统1500并且横穿空气通道102穿过颗粒集中器120和颗粒鉴别器130。当加热器元件122a、122b被加热并且在空气通道102内生成的热梯度以热泳方式迫使颗粒114朝向空气通道102的内部区域时,颗粒114可以集中在颗粒集中器120内。加热器元件122a、122b在颗粒集中器120内的空气通道102的膨胀区域1560中包含加热器片段1522a、1522b。加热器片段1522b在基本上垂直于空气流106的方向上定向并且与膨胀区域1560中的加热器片段1522a协作以将颗粒114集中在空气流106的内部区域中,即使流线108在膨胀区域1560中发散。颗粒鉴别器130包括具有加热器片段1532a和1532b的加热器元件132,该加热器元件被配置成将颗粒114偏转到一个或多个颗粒检测器134a、134b、134c上。加热器片段1532a、1532b可以被布置成“W”配置以形成用于将发散颗粒114保留在空气通道102的中心附近的热势阱并且将颗粒114偏转到颗粒鉴别器130内的一个或多个颗粒检测器134a、134b、134c上。在一些实施方式中,加热器元件132的加热器片段132a、132b可以被配置为侧向“V”以围住空气流102中的颗粒并且将颗粒偏转到颗粒检测器134a、134b、134c上。在一些实施方式中,加热器片段1532a、1532b可以包括多个蛇形片段以增加加热器元件132的电阻并且增加跨加热器元件132施加的加热器电压。
在一些实施方式中,比如向心力等外力的施加可以用于提高区分和鉴别不同粒度的能力。图16展示了包括离心式颗粒分离器级1660的用于分析空气流106中的颗粒的系统1600的俯视图。以进口空气流112进入系统1600的颗粒114横穿进口110、颗粒集中器120和离心式颗粒分离器级1660,该离心式颗粒分离器级具有定位于颗粒集中器120与颗粒鉴别器130之间的弯曲的空气通道102。空气流106中的颗粒可以在空间上分离,其中较小、较轻的颗粒停留在空气通道102的内部附近,并且较大、较重的颗粒朝向离心式颗粒分离器级1660的外部移动。颗粒鉴别器130可以包括颗粒检测器134的一维或二维阵列,这些颗粒检测器被配置成检测来自离心式颗粒分离器级1660的空间上分离的颗粒。系统1600可以进一步包括定位于离心式颗粒分离器级1660与颗粒鉴别器130之间的气流膨胀级1670。气流膨胀级1670可以具有随着空气流106横穿气流膨胀级1670而变宽的空气通道102。随着气流膨胀级1670内的流线发散,在离心式颗粒分离器级1660中空间上分离的颗粒可以在气流膨胀级1670中进一步分离。另外地,当气流106横穿气流膨胀级1670时,气流膨胀级1670内的空气通道102可以变宽以减慢空气流106中的空气速度和颗粒速度,以允许热泳力有更多时间作用于颗粒并使这些颗粒偏转。
在进入离心式颗粒分离器级1660之前,颗粒可以集中在与离心式颗粒分离器级1660中的空气通道102的中心线稍微偏移的内部区域中。热泳颗粒集中器120可以具有带有加热器片段1622a、1622b、1622c的加热器元件122a、122b,这些加热器元件被配置成迫使空气流106中的颗粒朝向与颗粒集中器120内的空气通道102的中心线偏移的内部区域以利用离心式颗粒分离器级1660中更多的空气通道102。为了迫使颗粒朝向与中心线偏移的内部区域,加热器片段1622a和1622c可以在平行于空气通道102和空气流106的方向上延伸,其中加热器片段1622c定位成更靠近颗粒集中器120中的空气通道102的中心线,并且加热器片段1622b在相对于空气流106成角度的方向上延伸。
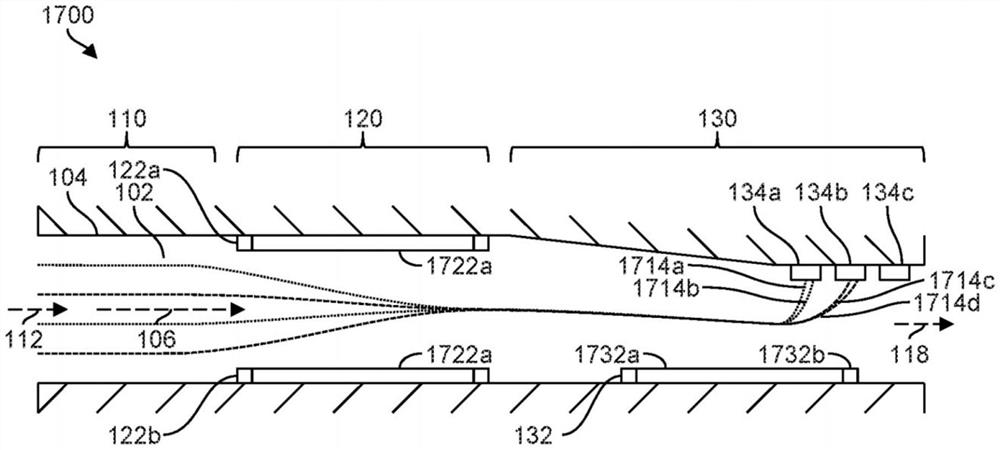
图17A至图17B展示了具有变宽的空气通道102和变窄的通道高度的用于分析颗粒的系统1700的俯视图和侧视图。系统1700包括进口110、热泳颗粒集中器120和热泳颗粒鉴别器130。
热泳颗粒集中器120包括处于通道壁104之间的空气通道102,该空气通道具有用于进口空气流112的第一开口端和用于出口空气流118的第二开口端。空气通道102被至少从第一开口端延伸到第二开口端的通道壁104封闭。各自具有至少一个加热器片段1722a的两个或更多个加热器元件122a、122b可以定位于第一开口端与第二开口端之间并且定位于空气通道102的外周附近。空气通道102和通道壁104的垂直于空气流106的截面几何形状是矩形的,并且具有至少一个加热器片段1722a的至少两个加热器元件122a、122b定位于通道壁104的两个相对侧上。加热器元件122a、122b的加热器片段1722a在基本上平行于空气流106的方向上沿通道壁104延伸。
包括加热器元件132和颗粒检测器134a、134b、134c的颗粒鉴别器130在颗粒集中器120下游的方向上耦接到空气通道102。与恒定尺寸的截面几何形状相比,空气通道102的宽度增加并且空气通道102的高度在颗粒鉴别器130内的下游方向上减小,从而允许空气流速度和颗粒速度减慢并且允许颗粒检测器134附近的热梯度增加。加热器元件132的延伸的加热器片段1732a在标称地平行于空气流106的方向上延伸并且被配置成即使在空气通道102变宽时也将颗粒保留或进一步集中在空气流106的内部区域中。加热器元件132的加热器片段1732b在颗粒检测器134a、134b、134c附近在标称地垂直于空气流106的方向上延伸,以允许对空气流106中的颗粒进行偏转、收集、检测和分析。颗粒鉴别器130内的空气通道102的截面几何形状(比如通道高度)可以随着空气流106横穿颗粒鉴别器130而变窄。空气通道的较窄区域允许加热器片段1732b与颗粒检测器134a、134b、134c之间的距离更小,这可能导致更高的热梯度和要对横穿变窄的区域的颗粒生成的更大的热泳力。
在操作中,集中在颗粒集中器120中的较小颗粒1714a、1714b可以在颗粒鉴别器130中被加热器元件132的加热器片段1732a、1732b生成的热梯度偏转并且收集到颗粒检测器134a的表面上。集中在颗粒集中器120中的较大颗粒1714c、1714d然后可以被加热器元件132的加热器片段1732a、1732b生成的热梯度偏转并且收集到颗粒检测器134b或颗粒检测器134c的表面上。控制空气流106的速度和颗粒鉴别器130中生成的热梯度允许将特定粒度范围内的颗粒选择性偏转和收集到颗粒检测器134a、134b、134c之一的表面上。
图18A至图18B展示了用于使用鞘空气分析空气流106中的颗粒的系统1800的俯视图和侧视图。系统1800包括进口110、颗粒集中器120和颗粒鉴别器130。颗粒集中器120可以具有布置在空气通道102的相对侧上的两个或更多个加热器元件122a、122b,该空气通道包围空气流106并且流体耦接到进口110。加热器元件122a、122b可以被配置成以热泳方式迫使颗粒背离空气通道102的外周并朝向空气通道102的内部区域。系统1800可以包括具有至少一个加热器元件的颗粒鉴别器130,该至少一个加热器元件被配置成以热泳方式迫使颗粒背离空气通道102的内部区域并朝向空气通道102的外周区域。颗粒鉴别器130可以在颗粒集中器120的下游方向上流体耦接到颗粒集中器120。空气通道102的截面几何形状可以在进口110、颗粒集中器120或颗粒鉴别器130内改变。
进口110可以包括鞘空气级1840。鞘空气级1840可以包括用于提供样本空气1812a的样本进气端口1842、用于提供鞘空气1812b的一个或多个鞘进气端口1844、以及鞘空气组合区域1846,其中鞘空气1812b和样本空气1812a可以在鞘空气组合区域1846中进行组合以形成组合空气流1812c并且将颗粒预集中在组合空气流1812c的内部区域中。样本空气1812a可以用鞘空气1812b的鞘围绕,该鞘空气在与空气流106中的空气和颗粒横穿空气通道102的方向相同的方向上移动。样本空气1812a中的颗粒可以分布在组合空气流1812c的内部区域中。鞘空气1812b可以相对不含颗粒,尽管鞘空气不需要净化颗粒物,因为下游流动路径可以被配置成仅从空气流106的中心部分将颗粒沉淀到颗粒检测器134上。在此配置中,鞘空气1812b中的任何颗粒将不会被引导到颗粒检测器134上,而是将被捕获到检测器表面的外部或通过出口空气流118离开。
进口110可以包括气流压缩级1850。气流压缩级1850可以定位于鞘空气级1840与颗粒集中器120之间。气流压缩级1850可以具有随着空气流106横穿气流压缩级1850而变窄的变化的空气通道102。气流压缩级1850可以使空气流106变窄以将颗粒预集中在空气流106的内部区域内。
来自鞘空气级1840的鞘空气组合区域1846的组合空气流1812c可以被提供到颗粒集中器120。在一些实施方式中,鞘空气级1840和气流压缩级1850可以定位于颗粒集中器120与颗粒鉴别器130之间,并且来自鞘空气级1840的组合空气流1812c可以被提供到颗粒鉴别器130。颗粒鉴别器130可以具有锥形截面几何形状,以提高通过沉淀加热器元件132将颗粒热泳沉积到各个颗粒检测器134上的效率。
随着空气通道102的截面几何形状在颗粒鉴别器130内变化,空气通道102的宽度可以增加并且空气通道102的高度可以在颗粒鉴别器130内的下游方向上减小,从而允许在颗粒检测器134附近颗粒速度和空气流速度减慢并且热梯度增加。空气流中的空气和颗粒的速度在气流膨胀级中可以显著减慢,以允许在颗粒检测器134的表面上更有效地偏转和收集颗粒。加热器元件132的加热器片段1832a可以被配置成随着空气通道102在颗粒鉴别器130内变宽而将颗粒保留或进一步集中在空气通道102和空气流106的内部区域中。加热器元件132的加热器片段1832b在颗粒检测器134附近在标称地垂直于空气流106的方向上延伸,以允许对空气流106中的颗粒进行偏转、收集、检测和分析。颗粒鉴别器130内的空气通道102的截面几何形状(比如空气通道102的高度)可以随着空气流106横穿颗粒鉴别器130而向下逐渐变细或变窄。空气通道102的较窄区域允许在空气通道102的高度在加热器元件132的加热器片段1832b附近减小的变窄的区域中生成更高的热梯度和更大的热泳力。空气通道高度的逐渐变细可以增加空气传播性颗粒传感器的颗粒检测效率。在一些实施方式中,空气通道102的截面几何形状可以随着空气流106沿空气通道102前进而变得更宽和更薄。
图19展示了用于使用管状鞘空气级分析空气流106中的颗粒的系统1900的透视图。系统1900包括进口110和颗粒集中器120。颗粒集中器120中的加热器元件122可以布置在包围空气流106的管状空气通道102的相对侧上。空气通道102可以流体耦接到进口110。随着空气通道102和空气流106横穿进口110并且进入颗粒集中器120,空气通道102的截面几何形状在进口110中发生变化。进口110可以包括鞘空气级1940,该鞘空气级具有用于提供样本空气1912a的样本进气端口1942和用于提供鞘空气1912b的至少一个鞘进气端口1944。鞘空气级1940可以包括鞘空气组合区域1946。进口110可以包括管状进口区段1952,并且鞘空气级1940可以包括围绕管状进口区段1952的管状鞘空气区段1954。管状鞘空气级1940可以包括鞘进气端口1944并且被配置成在鞘空气组合区域1946中将鞘空气1912b和样本空气1912a进行组合。组合的样本空气1912a和鞘空气1912b可以以出口空气流118离开颗粒集中器120。颗粒过滤器和保护筛网可以用于样本进气端口1942或鞘进气端口1944之前或之内,以过滤掉大颗粒并且保护空气通道102免于积累不期望的碎片。在一些实施方式中,大小选择性颗粒过滤器或大小选择性输入设备可以作为进口端口1942、1944的一部分被包括或放置在进口端口1942、1944的上游。筛网和/或过滤器可以是可去除和可清洁的。
图20展示了用于使用平面鞘空气级分析空气流中的颗粒的系统2000的透视图。系统2000包括进口110、颗粒集中器120和颗粒鉴别器130。进口110包括具有样本进气端口2042和一对平面鞘进气端口2044的平面鞘空气级2040。来自样本进气端口2042的样本空气2012a和来自平面鞘进气端口2044的鞘空气2012b可以在横穿颗粒集中器120和颗粒鉴别器130之前在平面鞘空气组合区域2046中进行组合。空气通道102的截面几何形状在进口110、鞘空气组合区域2046和颗粒集中器120内发生变化。
系统2000可以包括具有弯曲的空气通道102的离心式颗粒分离器级2060。气流压缩级2050可以定位于平面鞘空气级2040与离心式颗粒分离器级2060之间。气流压缩级2050可以与鞘空气组合区域2046重合。平面鞘空气级2040和气流压缩级2050可以协作以预集中空气通道102和空气流106中的颗粒。在横穿颗粒集中器120并且进入颗粒鉴别器130之前,颗粒可以在离心式颗粒分离器级2060中被分离,其中空气流106中较重的颗粒朝向弯曲的空气通道102的外部移动,并且较轻的颗粒停留在靠近弯曲的空气通道102的内部。
系统2000可以包括定位于离心式颗粒分离器级2060与颗粒集中器120之间的气流膨胀级2070,其中空气通道102随着气流106横穿气流膨胀级2070而变宽以减慢空气流106中的局部空气速度和局部颗粒速度。颗粒集中器120内的空气通道102也可以变宽以减慢空气流106中的空气和颗粒的速度。在一些实施方式中,颗粒集中器120中的加热器元件122a、122b可以被配置成将颗粒集中在加热器元件的中平面附近以保持从离心式颗粒分离器级2060发出的颗粒的空间分离而无需在颗粒进入颗粒鉴别器130之前将颗粒聚焦成束并且无需破坏空间分离。颗粒鉴别器130可以包括具有空气通道102的气流膨胀级2070的一部分或全部,该空气通道的截面几何形状随着空气流106横穿气流膨胀级而变宽,使得在离心式颗粒分离器级2060中空间上分离的颗粒可以在气流膨胀级2070中进一步分离。颗粒鉴别器130可以包括颗粒检测器134的一维或二维阵列,这些颗粒检测器被配置在与加热器元件132相对的壁104上以检测来自离心式颗粒分离器级2060的空间上分离的颗粒。
在一些实施方式中,热泳颗粒集中器120可以定位于离心式颗粒分离器级2060之前和鞘空气组合区域2046的下游,以在进入离心式颗粒分离器级2060之前进一步聚焦颗粒。组合的空气流可以被提供到颗粒集中器120、离心式颗粒分离器级2060,并且然后提供到颗粒鉴别器130。在一些实施方式中,热泳颗粒集中器120可以定位于鞘空气组合区域2046和气流压缩级2050之前,其中组合的空气流被提供到离心式颗粒分离器级2060和颗粒鉴别器130。
系统2000可以包括具有其中形成的空气通道102的各部分的平面主体层2080。主体层2080可以夹在平面基础层2082和平面覆盖层2084之间,其中样本进气端口2042和鞘进气端口2044形成在覆盖层2084中。在一些实施方式中,基础层2082和覆盖层2084可以包括一个或多个玻璃(比如硼硅酸盐玻璃)层,以帮助使用光学颗粒检测。一个或多个颗粒过滤器和保护筛网可以用于样本进气端口2042或鞘进气端口2044之前或之内,以过滤掉大颗粒并且保护空气通道102。过滤器和筛网可以是盘形的并且紧贴地装配到进口端口2042、2044中。筛网和/或过滤器可以是可去除和可清洁的。
图21展示了具有空气通道102并且在柔性组件2160中提供两个平面缓冲进口空气流2112a、2112b的等速进口110的局部剖视图。包括多个柔性层2170、2172、2174的柔性组件2160配置有具有侧壁104的矩形空气通道102和形成在中央柔性层2172中的两个相邻缓冲空气通道,这些缓冲空气通道用于通过缓冲进口空气流2112a、2112b吸入缓冲空气。在操作期间,样本空气可以通过进口空气流112被吸入并且缓冲空气可以通过缓冲进气流2112a、2112b被吸入。缓冲进口空气流2112a、2112b可以由空气移动设备提供动力,使得空气以与样本空气被吸入进口空气流112中类似的速率被吸入穿过缓冲进口空气流2112a、2112b以帮助确保一致且稳定的流量进入到样本空气通道102。缓冲空气流允许补偿可能以各种角度和流速撞击进口110的表面的环境空气流,以便从周围环境中更准确地提取颗粒并且从用于分析颗粒的系统2100中更准确地读取颗粒。空气移动设备可以与用于通过空气通道102吸入样本空气的空气移动设备相同或不同。在一些实施方式中,缓冲进口空气流2112a、2112b可以用作形成在柔性组件2160中的鞘空气级的鞘进气端口。插入到空气通道102或进口空气流2112a、2112b中的保护筛网和/或颗粒过滤器可以作为柔性组件2160的一部分被包括。
图22展示了具有空气通道102并且在柔性组件2260中提供四个缓冲进气流2212a、2212b、2212c、2212d的等速进口110的局部剖视图。具有系统2200的柔性层2270、2272、2274的柔性组件2260包括具有侧壁104的矩形空气通道102以及形成在柔性层2272和两个相邻柔性层2270、2274中的四个相邻缓冲空气通道,以允许对在吸入样本空气时可能以不同角度和速度撞击进口110表面的环境空气流进行改进的补偿。在一些实施方式中,具有或不具有保护筛网或颗粒过滤器的一个或多个缓冲进口空气流2112a、2112b、2112c、2112b可以用作形成在柔性组件2260中的鞘空气级的鞘进气端口。
图23A至图23B展示了包括具有带有变化的截面几何形状的矩形空气通道102的热泳颗粒集中器120的热泳颗粒检测系统2300的俯视图和侧视图,该热泳颗粒检测系统包括膨胀级2370、压缩级2380和延伸穿过颗粒集中器120和颗粒鉴别器130的一对多抽头加热器元件122a、122b。热泳颗粒集中器120包括膨胀级2370和压缩级2380,用于以机械方式和以热泳方式集中空气流106中的颗粒114并且增加每单位通道长度的颗粒集中效率。空气流106可以从进口空气流112进入空气通道102,横穿热泳颗粒集中器120的膨胀级2370和压缩级2380,横穿热泳颗粒鉴别器130,并且然后通过出口空气流118离开。颗粒集中器120可以包括定位于空气通道102一侧上的具有平滑弯曲加热器片段2322a、2322b的一对多抽头加热器元件122a、122b和定位于空气通道102的相对侧上的另一对加热器元件。即使流线108可能在膨胀级2370内发散,横穿空气通道102的颗粒也可能在该膨胀级内以热泳方式被迫使朝向空气流106的内部区域。颗粒在压缩级2380内继续以热泳方式被迫使朝向空气流106的内部,同时也被级内的流线会聚压缩。加热器元件122a、122b在膨胀级2370和压缩级2380的任一侧上的延伸可以有助于空气通道102内的颗粒集中。空气通道102的直线区段(未示出)可以定位于膨胀级2370与压缩级2380之间。多对膨胀级2370和压缩级2380可以沿空气通道102串联配置以提高空气流106中的颗粒114的浓度,从而允许每对级的浓度增益进行组合。
多抽头加热器元件122a、122b可以延伸穿过颗粒集中器120并且进入具有附加加热器片段2322c、2322d的颗粒鉴别器130。加热器片段2322d标称地平行于颗粒鉴别器130中的空气流106延伸,而偏转加热器片段2332a、2332b、2332c在与颗粒检测器134a、134b、134c相对的侧上在标称地垂直于空气流106的方向上延伸以允许对通过进口空气流112进入的颗粒进行偏转、收集、检测和分析。
加热器抽头2328a至2328n提供到加热器元件122a、122b中的各个加热器片段的电连接,用于选择性地施加电功率以允许控制由每个加热器片段生成的热量和在空气通道102中生成的热梯度。控制空气流106的速度和在颗粒集中器120和颗粒鉴别器130中生成的热梯度允许将颗粒114选择性地集中、偏转和收集到颗粒检测器134a、134b、134c之一的表面上。多抽头加热器元件122a、122b允许连续的加热器片段、局部温度带控制、可配置的温度轮廓、减少的电引出要求和灵活的目标颗粒响应。在一些实施方式中,多抽头加热器元件122a、122b可以包括具有用作空气通道102的通道壁的聚合物阻挡层的隔热壁装式薄膜加热器元件。在一些实施方式中,加热器元件122a、122b的一个或多个加热器片段可以用变化的电压来调节以允许在相对于空气流106的纵向方向或横向方向上对颗粒114进行受控扫描,使得所选粒度范围的颗粒可以被收集到颗粒检测器134a、134b、134c之一上。对跨偏转加热器片段2332a、2332b、2332c施加的电压的调节可以有助于颗粒选择、偏转、筛分、检测和收集均匀性的改进。
系统2300可以包括多对膨胀级2370和压缩级2380,其配置有连接膨胀级和压缩级对的空气通道102的一个或多个弯曲区段。弯曲区段允许连接的膨胀级和压缩级对来回缠绕以保持紧凑,同时提高空气通道内的颗粒浓度。弯曲区段可以配备有一个或多个加热器片段以保持和集中穿过配备的弯曲区段行进的颗粒。
热泳颗粒检测系统2300的使用寿命可以通过控制和限制在颗粒检测器134a、134b、134c的表面上收集的颗粒物的量来延长。例如,颗粒检测器134a可以与覆盖的偏转加热器片段2332a结合操作以收集颗粒物,而颗粒检测器134b、134c和相关加热器片段2332b、2332c保持在断开状况。在取决于应用的秒、分钟、小时或天的所选时间段之后,可以关闭颗粒检测器134a和偏转加热器片段2332a并且可以打开具有偏转加热器片段2332b的颗粒检测器134b并投入操作。在另一个所选时间段之后,可以关闭颗粒检测器134b和偏转加热器片段2332b并且可以将具有偏转加热器片段2332c的颗粒检测器134c投入操作,等等。以此方式,可以控制施加到加热器片段2332a、2332b、2332c中的每一个的功率以允许偏转的颗粒朝向外周壁扫描并且扫描到颗粒检测器134a、134b、134c的表面上。可以控制施加到加热器片段2322c、2322d或2322e中的一个或多个的功率以沿外周壁在横向方向上偏转颗粒。在一些实施方式中,谐振频率的增量变化或基于谐振的颗粒检测器的基线值的频率偏移可以用于确定操作哪对颗粒检测器和加热器片段以及操作多长时间。
图24展示了用于分析空气流中的颗粒的系统2400的框图。颗粒检测系统2400包括具有一个或多个处理器和电路系统的控制器2410,用于运行程序代码和执行指令以分析空气流中的颗粒以及其他功能。控制器2410可以经由通信总线2440连接到一个或多个存储器2412。存储器2412可以包括用于存储程序指令和数据的易失性和非易失性存储器的组合。控制器2410可以经由一个或多个无线通信链路2414和天线2416或一个或多个有线通信链路2418和比如以太网或USB连接等外部通信线路2420与系统2400外部的其他处理器和数据系统通信。比如电池或AC/DC电源连接等一个或多个电源2422和接地线路2424可以为连接到总线2440的设备提供本地调节的电源。比如温度传感器、压力传感器、湿度传感器、加速度计、陀螺仪、环境光传感器、时钟、麦克风和扬声器等各种传感器2426和换能器可以经由通信总线2440连接到控制器2410。
用于检测空气流中的颗粒的一个或多个颗粒检测模块2430可以包括用于进入样本空气的进口空气流112和用于排出空气的出口空气流118。颗粒检测模块2430可以包括一个或多个进口、热泳颗粒集中器和热泳颗粒鉴别器。颗粒检测模块2430内的空气流可以被空气通道的壁包围,该空气通道从用于进口空气流的第一开口端延伸到用于出口空气流的第二开口端。颗粒检测模块2430可以经由通信总线2440或其他专用控制和/或数据线连接到控制器2410。控制器2410可以发送控制信号以控制施加到与颗粒检测模块2430中的空气流耦接的各个加热器元件的功率。控制器2410可以耦接到一个或多个空气移动设备以控制空气通过空气通道的移动。
在一些实施方式中,控制器2410可以向将一个或多个控制信号提供到颗粒检测模块2430以生成和调整空气流中的热梯度。例如,空气流中的热梯度可以通过调整施加到生成热梯度的一个或多个加热器元件的功率或通过调整空气通道中的空气流的空气流速度来调整。
图25示出了用于分析空气流中的颗粒的方法2500的框图。方法2500包括将功率施加到定位于包围空气流的至少一部分的空气通道的各个侧上的加热器元件,如框2505所示。功率可以施加到一对或多对加热器元件,这些加热器元件可以定位于空气通道的外周附近和相对侧上。在一些实施方式中,热泳颗粒集中器中的空气通道的整个长度用作加热器。在其他实施方式中,仅空气通道的短的部分用作加热器。在其他实施方式中,可以在空气通道的某些区段处采用加热器元件组或阵列。这些加热器元件可以在不同温度下操作并且可以单独寻址以便在所生成的热梯度中提供高度的灵活性。
在一些实施方式中,加热器元件的功率(例如电功率)可以具有工作周期(打开和关闭)以延长系统部件的寿命。在许多使用案例中,与颗粒物浓度的任何显著变化相关联的时间常数处于几十秒到几分钟或几小时或更长时间的数量级。由于可能只需要每隔几秒或几分钟或每隔几小时进行一次空气质量测量,因此可能需要延长的时间段才可以关闭颗粒物采样。
可以通过空气通道吸入空气,如框2510所示。吸入的空气可以在空气通道内生成空气流。可以使用多种空气移动设备中的任何一种通过空气通道吸入空气,这些空气移动设备比如泵、鼓风机、风扇、涡轮机、机动进气设备、波纹管泵、隔膜泵、蠕动泵、活塞泵、容积泵、旋片泵、文丘里设备、气流管理设备或用于通过空气通道移动或吸入空气的其他空气吸入装置。可以以与加热器元件的工作周期大致对应的工作周期来执行通过空气通道吸入空气。
如框2515所示,可以在空气通道内生成热梯度。来自施加到加热器元件的电功率的热量与气流轮廓和空气通道几何形状进行组合,在空气通道内生成一个或多个热梯度,导致将空气流中的颗粒上的热泳力主要引导朝向空气流的内部或中心。
如框2520所示,可以通过使用由热梯度生成的热泳力来迫使孔气流中的颗粒背离空气通道的外周并朝向空气通道的内部区域以将颗粒集中在空气流的内部区域中。引入到空气通道的进口中的气溶胶颗粒可以在空气流的整个截面区域中稍微随机地分布。当空气流和颗粒通过使用受控热梯度横穿颗粒集中器时,热泳颗粒集中器的作用可以减小物理截面并且使在空气流中流动的颗粒的分布变窄。可以通过使用相对于空气通道的一个或多个轴线对齐的相反的热泳力来实现颗粒集中。
生成的热梯度部分地取决于进入到空气流中的热量损失。空气通道中的空气流可以表现出作为距通道壁的距离和沿通道向下的长度的函数的速度梯度。由于去除的热量的量是空气流中的局部空气速度的函数,因此生成的热梯度在功能上取决于空气流速度轮廓。
可以检测集中在空气流中的颗粒,如框2525所示。在一些实施方式中,可以通过利用生成的热泳力偏转颗粒以引导空气流中的颗粒背离空气通道的内部区域并朝向定位于空气通道的壁上的一个或多个颗粒检测器来检测颗粒,其中颗粒可以被收集到颗粒检测器的表面上并且响应于表面上的质量负载而引起颗粒检测器的谐振频率的变化。在一些实施方式中,固定时间内谐振频率的变化可以被确定为对添加到颗粒检测器的表面上的有效质量的指示。在具有大颗粒物浓度的环境中特别有益的一些实施方式中,可以使用测量用于针对预定的频移将颗粒物沉积在基于谐振的颗粒检测器上的时间的自适应循环。该系统可以使用至少一个处理器并在软件控制下,使得当空气颗粒密度高时,单元可以不那么频繁地采样以延长传感器的寿命。
在一些实施方式中,颗粒集中器或颗粒鉴别器中的热梯度可以通过调节到相关加热器元件的功率来调节。热梯度的调节可以分散颗粒在颗粒检测器上的沉积以避免非均匀沉积并且延长颗粒检测器的寿命。
可以分析空气流中检测到的颗粒,如框2530所示。可以应用一种或多种算法来检测谐振颗粒检测器的频移并且补偿温度效应。该算法可以应用校准系数和各种模型参数来确定在颗粒检测器表面上收集的颗粒的有效质量并且生成采样空气的气溶胶质量浓度估计。在一些实施方式中,可以针对一个或多个所选粒度范围来估计气溶胶质量浓度。
尽管在上述过程流程和方法中描述的各个框和步骤旨在是代表性的,但是步骤和步骤的顺序可以改变并且仍然保持在本披露内容的范围、精神和权利要求内。在不失一般性的情况下,可以对步骤和步骤的顺序进行变化,比如在一个步骤之前执行另一个步骤或将两个或更多个步骤组合成一个步骤。
虽然上文已经描述了各个实施方式,但应该理解的是这些实施方式通过举例而不是限制的方式来进行呈现。本披露内容的广度和范围不应被上文描述的任何实施方式所限制,而是应当根据以下权利要求、随后提交的权利要求和其等效物来限定。
- 具有可变通道几何形状的热泳颗粒检测系统
- 具有可变通道几何形状的颗粒物过滤器以及制造此种过滤器的方法