一种多工位切割头装置及其张力控制方法
文献发布时间:2023-06-19 13:48:08
技术领域
本申请涉及单晶硅棒切割技术领域,尤其涉及一种多工位切割头装置及其张力控制方法。
背景技术
硅片是单晶硅太阳能电池的重要原料,从硅料到硅片的大致工艺流程是长晶、去头尾、切断、切方、磨抛、切片等,通常利用切方机对单晶硅棒进行切方。切方机是一种将圆柱状的单晶硅棒沿着晶线切割形成四棱柱状的装置,切方机中最核心的设备为切割头,切割头的原理是通过一根高速运动的钢线带动附着在钢线上的切割刃料对半导体等硬脆材料进行摩擦,从而达到切割目的。
传统的金刚线单晶硅棒切方机设置有一个切割头,仅能进行单根单晶硅棒的切割加工,效率低下。为了提高切割效率,将只有一个切割头的单工位切方机改造为具有两个甚至多个切割头的多工位切方机,能够同时对两根及以上单晶硅棒进行切割加工。
但多工位切方机切割头装置存在以下缺点:一方面,由于相邻两个相互独立的切割头中的主辊转动速度不一致,使缠绕主辊设置的金刚线在两个切割头之间产生张力偏差,一般将两个切割头的金刚线之间的张力偏差称为张力波动。又一方面,在金刚线快速运动切割单晶硅棒时,分别位于两个切割头上的单晶硅棒对金刚线缠绕形成的线网产生的切割阻力不一致,这也为导致两个切割头的线网之间产生张力波动。参见附图1,可见由于两个切割头的金刚线之间产生张力波动时,导致金刚线变得松弛,图1中虚线为变得松弛的金刚线;参见附图2,可见由于两个切割头的金刚线之间产生张力波动时,导致金刚线变得紧绷,图2中虚线为变得紧绷的金刚线。当两个切割头的金刚线过于松弛时,会影响切割质量;当两个切割头的金刚线过于紧绷时,容易导致金刚线断裂,增加设备的故障率。
因此,为了消除金刚线在切割时产生的张力波动,本申请提出一种具有张力调节单元的多工位切割头装置及其张力控制方法。
发明内容
本申请提供了一种多工位切割头装置及其张力控制方法,以解决现有多工位切方机无法消除金刚线在切割时产生的张力波动的问题。
本申请采用的技术方案如下:
一方面,本申请提供一种多工位切割头装置,所述装置包括:
机架;
机架正面设置有至少两组切割机构,机架背面设置有与所述切割机构相对应的换向导轮组;
每个所述切割机构中包括多个切割盘片,主辊套接所述切割盘片,驱动机构中的伺服电机驱动所述主辊转动;
在相邻两个所述换向导轮组之间设置有张力调节单元;
所述张力调节单元包括与所述机架背面连接的第五伺服电机、第一端与所述第五伺服电机连接的联轴器、第一端与联轴器第二端连接的张力臂、以及与张力臂第二端连接的张力导轮;
金刚线在所述换向导轮组和所述张力导轮的引导下缠绕所述切割机构形成切割网。
进一步地,所述联轴器第二端的端面上设置有凹槽,所述张力臂第一端的端面上设置有凸台,所述凹槽与所述凸台相对应嵌装。
进一步地,所述装置还包括与每组所述切割机构连接传动机构、与每组所述传动机构连接驱动机构,每组所述驱动机构中的伺服电机连接所述机架;
每组所述驱动机构包括第一伺服电机、第二伺服电机、第三伺服电机和第四伺服电机,所述第一伺服电机的旋转轴与所述第二伺服电机的旋转轴相对设置且相互平行形成第一平面,所述第三伺服电机的旋转轴与所述第四伺服电机的旋转轴相对设置且相互平行形成第二平面,所述第一伺服电机的旋转轴与所述第三伺服电机的旋转轴相互垂直设置,所述第二伺服电机的旋转轴与所述第四伺服电机的旋转轴相互垂直设置,所述第一平面与所述第二平面相互对应且平行;
每组所述传动机构包括与所述第一伺服电机的旋转轴连接的第一主辊、与所述第二伺服电机的旋转轴连接的第二主辊、与所述第三伺服电机的旋转轴连接的第三主辊、以及与所述第四伺服电机的旋转轴连接的第四主辊;
每组所述切割机构包括八个切割盘片,设置在所述第一主辊上的第一切割盘片和第二切割盘片、与设置在所述第二主辊上的第三切割盘片和第四切割盘片的位置相对应;以及设置在所述第三主辊上的第五切割盘片和第六切割盘片、与设置在所述第四主辊上的第七切割盘片和第八切割盘片的位置相对应;
每组所述换向导轮组包括七个换向导轮,所述七个换向导轮的位置分别与所述第一切割盘片、所述第二切割盘片、所述第三切割盘片、所述第四切割盘片、所述第五切割盘片、所述第六切割盘片、所述第七切割盘片的位置相对应;
所述金刚线在每组所述换向导轮组和所述张力导轮的引导下绕设在每组所述切割机构上形成“井”字形切割网。
进一步地,所述第一主辊上切割盘片上的金刚线与第二主辊上切割盘片上的金刚线处于一个平面;所述第三主辊上切割盘片上的金刚线与第四主辊上切割盘片上的金刚线处于一个平面;处于两个所述平面的两层线网形成所述“井”字形切割网。
进一步地,当所述机架正面设置有两组切割机构时,所述金刚线从第一组换向导轮组的进线导轮进入,依次通过第一换向导轮、所述第一切割盘片、所述第三切割盘片、第三换向导轮形成第一条线;所述金刚线继续从第三换向导轮引出,再依次通过第五换向导轮、所述第五切割盘片、所述第七切割盘片、第七换向导轮形成第二条线;所述金刚线继续从第七换向导轮引出,再依次通过第二换向导轮、所述第二切割盘片、所述第四切割盘片、第四换向导轮形成第三条线;所述金刚线继续从第四换向导轮引出,再依次通过第六换向导轮、所述第六切割盘片、所述第八切割盘片形成第四条线;所述第一条线与所述第三条线平行、所述第二条线与所述第四条线平行,形成第一“井”形切割网;
所述金刚线从所述第八切割盘片引出并绕设过所述张力导轮,所述金刚线再通过第二切割机构及第二组换向导轮组继续进行绕制形成第二“井”形切割网后,再从第二换向导轮组的出线导轮引出。
进一步地,每组所述换向导轮中均包括进线导轮和出线导轮,在所述进线导轮之后相邻设置有所述张力调节单元,和/或,在所述出线导轮之前相邻设置有所述张力调节单元。
又一方面,本申请还提供一种多工位切割头装置的张力控制方法,应用于PID控制模型,所述方法包括以下步骤:
获取张力调节单元中的第五伺服电机的实时角度;
预设张力调节单元中第五伺服电机的目标角度;
通过所述目标角度和所述实时角度计算角度差;
通过所述角度差计算相邻两个切割机构中伺服电机的转速比;
通过所述转速比实时调整所述相邻两个切割机构中伺服电机的转速,直至所述相邻两个切割机构之间金刚线的线速度相等。
进一步地,所述方法还包括:
获取每个切割机构中各伺服电机的实时转矩;
通过所述各伺服电机的实时转矩计算各伺服电机之间的实时转矩差;
预设所述各伺服电机之间的目标转矩差;
通过所述目标转矩差与所述实时转矩差计算各伺服电机的虚拟齿轮比;
通过所述各伺服电机的虚拟齿轮比实时调整切割机构中各伺服电机的转矩,直至每个切割机构中所述各伺服电机的转矩相等,也即每个切割机构中金刚线的线速度相等。
采用本申请的技术方案的有益效果如下:
当切方机有多个切割头时,通过张力调节单元,能够消除多组切割机构之间金刚线张力波动的相互影响,避免金刚线出现张力变小而松弛影响切割质量的情况,或金刚线出现张力变大而过度拉伸使金刚线易断裂的情况;
本申请的一种多工位切割头装置的张力控制方法,基于PID控制模型,通过协同控制消除切割机构之间的金刚线、切割机构中的金刚线的张力波动,保证切割头装置的切割质量。
附图说明
为了更清楚地说明本申请的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为现有技术中两个切割头在切割时金刚线因产生张力波动而变松弛的示意图;
图2为现有技术中两个切割头在切割时金刚线因产生张力波动而变紧绷的示意图;
图3为本申请实施例所提供的一种多工位切割头装置的机架正面结构示意图;
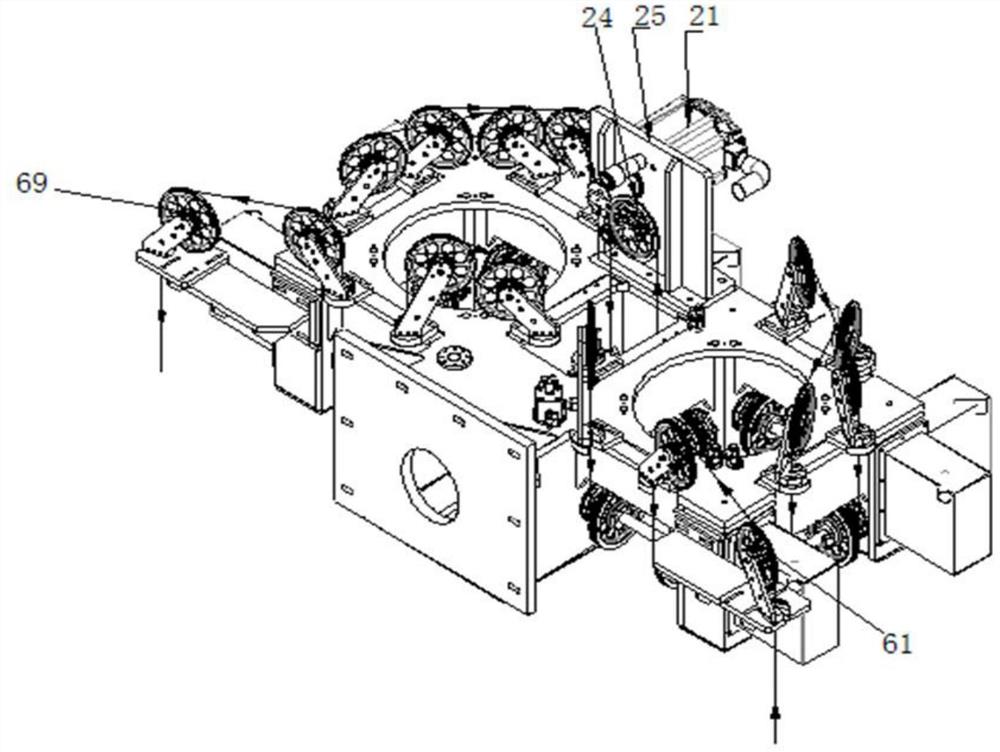
图4为本申请实施例所提供的一种多工位切割头装置的机架背面结构示意图;
图5为本申请实施例所提供的又一种多工位切割头装置的机架背面结构示意图;
图6为本申请实施例所提供的张力调节单元的结构示意图;
图示说明:
其中,11-机架正面,12-机架背面;
2-张力调节单元,21-第五伺服电机,22-联轴器,23-张力臂,24-张力导轮,25-固定架;
3-金刚线;
5-切割机构,51-第一切割盘片,52-第二切割盘片,53-第三切割盘片,54-第四切割盘片,55-第五切割盘片,56-第六切割盘片,57-第七切割盘片,58-第八切割盘片;
61-进线导轮,62-第一换向导轮,63-第二换向导轮,64-第三换向导轮,65-第四换向导轮,66-第五换向导轮,67-第六换向导轮,68-第七换向导轮,69-出线导轮;
7-第一“井”形切割网;
8-第二“井”形切割网。
具体实施方式
下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本申请相一致的所有实施方式。仅是与权利要求书中所详述的、本申请的一些方面相一致的系统和方法的示例。
参见图1,为现有技术中两个切割头在切割时金刚线因产生张力波动而变松弛的示意图;参见图2,为现有技术中两个切割头在切割时金刚线因产生张力波动而变紧绷的示意图;参见图3,为本申请实施例所提供的一种多工位切割头装置的机架正面结构示意图;参见图4,为本申请实施例所提供的一种多工位切割头装置的机架背面结构示意图;参见图5,为本申请实施例所提供的又一种多工位切割头装置的机架背面结构示意图;参见图6,为本申请实施例所提供的张力调节单元的结构示意图。
本申请提供的一种多工位切割头装置,用于对单晶硅棒进行切割。本申请装置包括两个及以上的切割头,切割头设置在机架上。切割头包括切割机构、传动机构、驱动机构、金刚线、换向导轮组,相邻两个切割头之间设置有张力调节单元。本申请装置具体包括如下:
机架。
机架正面11设置有至少两组切割机构5。
机架背面12设置有与切割机构5相对应的换向导轮组。每个切割机构5中包括多个切割盘片,传动机构中的主辊套接切割盘片,驱动机构中的伺服电机驱动主辊转动;
由于切割时,相邻两组切割机构之间主辊转动速度不一致,使缠绕主辊设置的金刚线3在两个切割头之间产生张力偏差,因此为了消除这种张力偏差,使金刚线3张力始终保持稳定,则在相邻两个导向轮组之间设置有张力调节单元2。具体为:
参见图6,张力调节单元2包括通过固定架25与机架背面12连接的第五伺服电机21、第一端与第五伺服电机21连接的联轴器22、第一端与联轴器22第二端连接的张力臂23、以及与张力臂23第二端连接的张力导轮24。
进一步地,为了方便联轴器22与张力臂23之间的连接,在联轴器22第二端的端面上设置有凹槽,张力臂23第一端的端面上设置有凸台,凹槽与凸台相对应嵌装。
本申请装置中的每组切割机构5还连接有传动机构,与每组传动机构连接驱动机构,每组驱动机构中的伺服电机连接机架。具体是:
每组驱动机构包括第一伺服电机、第二伺服电机、第三伺服电机和第四伺服电机,第一伺服电机的旋转轴与第二伺服电机的旋转轴相对设置且相互平行形成第一平面,第三伺服电机的旋转轴与第四伺服电机的旋转轴相对设置且相互平行形成第二平面,第一伺服电机的旋转轴与第三伺服电机的旋转轴相互垂直设置,第二伺服电机的旋转轴与第四伺服电机的旋转轴相互垂直设置,第一平面与第二平面相互对应且平行;
每组传动机构包括与第一伺服电机的旋转轴连接的第一主辊、与第二伺服电机的旋转轴连接的第二主辊、与第三伺服电机的旋转轴连接的第三主辊、以及与第四伺服电机的旋转轴连接的第四主辊;
每组切割机构5包括八个切割盘片,设置在第一主辊上的第一切割盘片51和第二切割盘片52、与设置在第二主辊上的第三切割盘片53和第四切割盘片54的位置相对应,第一主辊上切割盘片上的金刚线与第三第二主辊上切割盘片上的金刚线处于一个平面;以及设置在第三主辊上的第五切割盘片55和第六切割盘片56、与设置在第四主辊上的第七切割盘片57和第八切割盘片58的位置相对应,第二第三主辊上切割盘片上的金刚线与第四主辊上切割盘片上的金刚线处于一个平面,处于两个平面的两层线网形成“井”字形切割网。
每组换向导轮组包括七个换向导轮,七个换向导轮的位置与第一切割盘片51、第二切割盘片52、第三切割盘片53、第四切割盘片54、第五切割盘片55、第六切割盘片56、第七切割盘片57位置相对应;
金刚线3在导向轮组和张力导轮24的引导下绕设在切割盘片上形成切割网。
参见图3和图4,金刚线3绕制形成“井”字形切割网的绕制方式具体为:图中实线为机架正面11的金刚线3,虚线为机架背面12的金刚线3,箭头表示金刚线3的方向。金刚线3从机架背面12的第一组换向导轮组的进线导轮61进入,依次通过第一换向导轮62、第一切割盘片51、第三切割盘片53、第三换向导轮64形成第一条线;金刚线3从第三换向导轮64引出,再依次通过第五换向导轮66、第五切割盘片55、第七切割盘片57、第七换向导轮68形成第二条线;金刚线3从第七换向导轮68引出,再依次通过第二换向导轮63、第二切割盘片52、第四切割盘片54、第四换向导轮65形成第三条线;金刚线3从第四换向导轮65引出,再依次通过第六换向导轮67、第六切割盘片56、第八切割盘片58形成第四条线。第一条线与第三条线平行、第二条线与第四条线平行,形成第一“井”形切割网7。
金刚线3从第八切割盘片58引出并绕设过张力导轮24,金刚线3再通过第二组切割机构及第二组换向导轮组继续进行绕制形成第二“井”形切割网8后,再从第二换向导轮组的出线导轮69引出。第二“井”形切割网8的绕制方式与第一“井”形切割网7的绕制方式相同。
参见图5,本申请实施例提供的切割头装置包括两组切割机构,与两组切割机构对应设置有两组传动机构、两组驱动机构和两组换向导轮组。金刚线3绕设通过第一组换向导轮组、第一组切割机构形成第一“井”字形切割网7,金刚线3继续绕设张力导轮24,再绕设通过第二组换向导轮组、第二组切割机构形成第二“井”字形切割网8。
为了加快对金刚线3张力调节的效率,还可在每组进线导轮之后相邻设置该张力调节单元2,和/或,在出线导轮之前相邻设置该张力调节单元2。当然,当切方机只有一个切割头时,依旧可以设置该张力调节单元2,以起到调节张力波动的情况。
本申请装置还包括PLC控制器,PLC控制器用于控制伺服电机的输出扭矩。
本装置中张力调节单元2调节张力波动的原理如下:
当金刚线3因张力变小出现松弛,即张力导轮24受到的来自金刚线3的拉力小于张力导轮24受到的来自第五伺服电机21的扭矩力时,第五伺服电机21驱动张力导轮24向远离机架的方向运动,同时控制器接收到第五伺服电机位置变动的信号后,会发出指令控制对应切割盘片的转速,切割盘片快速转动将金刚线3松弛出来的多余长度的金刚线3逐渐回收,使得金刚线3张力逐渐增大,张力导轮24受到的来自金刚线3的拉力大于张力导轮24受到的来自第五伺服电机21的扭矩力,张力导轮24在金刚线的拉动下又向靠近机架的方向运动,直到张力导轮24受到的来自金刚线3的拉力等于张力导轮24受到的来自第五伺服电机21的扭矩力,也即张力导轮24受力平衡,此时张力波动消除,张力导轮24也恢复到初始位置。
当金刚线3因张力变大出现紧绷,即张力导轮24受到的来自金刚线3的拉力大于张力导轮24受到的来自第五伺服电机21的扭矩力时,第五伺服电机21驱动张力导轮24向靠近机架的方向运动,同时控制器接收到第五伺服电机位置变动的信号后,会发出指令控制对应切割盘片的转速,切割盘片转速改变释放更多的金刚线3,则金刚线3张力逐渐变小,张力导轮24受到的来自金刚线3的拉力逐渐等于张力导轮24受到的来自第五伺服电机21的扭矩力,也即张力导轮24受力平衡,此时张力波动消除,张力导轮24也恢复到初始位置。
当切方机有多个切割头时,通过张力调节单元2,能够消除切割时金刚线3产生能够消除多组切割机构之间金刚线张力波动的相互影响,避免金刚线3出现张力变小而松弛影响切割质量的情况,金刚线3出现张力变大而过度拉伸使金刚线3易断裂的情况。
本申请还提供一种多工位切割头装置的张力控制方法,本方法是基于PID控制模型的PID控制算法,PID(proportion-integral-derivative,比例-积分-微分控制器)控制算法是对误差值进行比例、积分、微分运算,得到执行值,通过执行值进行实时调整,使驱动机构的伺服电机更加精确稳定。误差值是由输入值的测量值偏差或是由此偏差衍生的信号。
参见图3,形成第一“井”字形切割网7的这一段金刚线3为第一金刚线,形成第二“井”字形切割网8的这一段金刚线为第二段金刚线,在第一“井”字形切割网7之后、在第一“井”字形切割网8之前的这一段金刚线为第三段金刚线。
本申请的多工位切割头装置中包括两个及以上的切割头,由于相邻两个切割结构A和B之间,各个切割结构中的主辊直径不能绝对相等,存在细小的直径偏差,因此当A切割机构与B切割机构以相同的伺服电机转速运行时,A切割结构的线速度与B切割机构的线速度就会存在差异,从而,使得位于A、B切割机构之间的金刚线(也就是第三段金刚线)的张力波动,进而增加整个装置的断线率,也影响各切割机构的切割质量。
因此,本申请在两个切割头之间设置有张力调节单元,通过张力调节单元输出高动态的恒定张力,再结合PID控制模型,解决相邻两个切割机构之间的金刚线(也就是第三段金刚线)的张力波动问题。多工位切割头装置的张力控制方法包括以下步骤:
获取张力调单元中的第五伺服电机的实时角度;
预设张力调节单元中第五伺服电机的目标角度;
通过目标角度和实时角度计算角度差;
通过角度差计算相邻两个切割机构中伺服电机的转速比;
通过转速比实时调整相邻两个切割机构中伺服电机的转速,直至相邻两个切割机构之间的金刚线(也就是第三段金刚线)的线速度相等,使得控制周期内相邻切割机构之间的金刚线(也就是第三段金刚线)的张力稳定,有效降低多工位切割头装置断线率。进一步地,单个切割机构内的多个主辊直径也不能绝对相等,而存在细小的直径偏差。当各个主辊旋转相同的多圈数后,由于细小的直径偏差,导致在各个主辊上走过的金刚线长度不同,使得单个切割机构内的各段金刚线张力不等,比如第一段金刚线由多段金刚线组成,由于主辊直径偏差使得第一段金刚线中的多段金刚线张力不等,进而严重影响切割质量,同时也增加各主辊间的能量内耗,直至伺服电机过载报警。
为解决由于单个切割机构中主辊轮径不等而带来的金刚线(比如第一段金刚线中的多段金刚线)张力之间累计误差问题,本申请的方法还包括:
获取每个切割机构中各伺服电机的实时转矩;
通过各伺服电机的实时转矩计算各伺服电机之间的实时转矩差;
预设各伺服电机之间的目标转矩差;
通过目标转矩差与实时转矩差计算各伺服电机的虚拟齿轮比;
通过各伺服电机的虚拟齿轮比实时调整切割机构中各伺服电机的转矩,直至每个切割机构中各伺服电机的转矩相等,进而使得控制周期内单个切割机构中金刚线(比如第一段金刚线中的多段金刚线)的线速度相等。其中,目标转矩差可设置为0。
需要说明的是,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个....”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上所述仅是本申请的具体实施方式,使本领域技术人员能够理解或实现本申请。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
应当理解的是,本申请并不局限于上面己经描述并在附图中示出的内容,并且可以在不脱离其范围进行各种修改和改变。本申请的范围仅由所附的权利要求来限制。
- 一种多工位切割头装置及其张力控制方法
- 一种具有多切割头的多工位旋转的激光研磨装置