胸背训练设备
文献发布时间:2024-01-17 01:28:27
技术领域
本发明涉及医疗器械的技术领域,具体地,涉及一种胸背训练设备。
背景技术
目前,因外力冲击或者自身因素等各种原因导致人体的前胸或者后背受损的现象非常普遍。为了实现前胸或者后背这些部位机能的恢复,就必须对受限部位进行康复训练。在临床上,可通过胸背康复训练设备对患者进行康复训练。
但是,现有的胸背康复训练设备的功能比较单一,患者需要通过自主运动提供动力,对抗胸背康复训练设备的由气缸动作或油缸动作或砝码所形成的阻力,从而进行主动训练。对于一些受损稍重或者力量较弱的人,自身的主动运动能力较弱,无法通过现有的胸背训练设备进行对应的目标部位的训练,即,无法通过胸背训练设备进行被动训练,而只能通过康复师人工进行被动训练。这导致现有的胸背康复训练设备的可应用范围较小,通用性不高。而且,气缸或者油缸或者砝码通常位于座垫的前方或者侧方,这导致胸背康复训练设备所需占用的空间较大。
发明内容
为了至少部分地解决现有技术中存在的问题,根据本发明的一个方面,提供了一种胸背训练设备。胸背训练设备包括机架、驱动电机和训练杆,机架上设置有座垫,且机架在座垫下方形成有安装空间;驱动电机,驱动电机设置在安装空间内;训练杆,训练杆包括第一端和第二端,第一端与驱动电机的输出轴连接,第二端构造成胸背训练时的力作用端;其中,驱动电机具有第一工作模式和第二工作模式,在第一工作模式下,通过第二端施加作用力带动训练杆以使驱动电机以第一功率工作;在第二工作模式下,驱动电机以第二功率工作使训练杆向训练者施加作用力。
本发明的胸背训练设备不仅可以为使用者提供主动训练的模式,还可以为使用者提供被动训练的模式。如此,本发明的胸背训练设备的应用范围较大,受众范围广,大大提高了胸背训练设备的通用性。而且,驱动电机位于座垫的下方的安装空间,使得驱动电机无需占用座垫前方或者侧方的空间,大大缩小了胸背训练设备的占用空间,便于在特定的场所布置更多数量的胸背训练设备。
示例性地,机架上远离训练杆的一侧连接有支撑架,座垫具有前端和后端,后端相比前端更靠近支撑架,且后端低于前端。
示例性地,座垫与水平面具有夹角,夹角的范围为5°~20°。
示例性地,训练杆包括第一训练杆和第二训练杆,第一训练杆和第二训练杆分别可拆卸地连接至驱动电机的相对两侧,第一训练杆具有第一握持部,第二训练杆具有第二握持部,第一握持部和第二握持部分别位于座垫的相对两侧。
示例性地,机架包括第一架体和第二架体,第二架体连接至第一架体的上部,座垫设置在第二架体上,第一架体与第二架体之间形成安装空间。
示例性地,第二架体朝第一架体所在平面的投影位于第一架体的中轴线上,驱动电机连接至第二架体。
示例性地,胸背训练设备包括触控面板和控制模块,控制模块用于响应于操作者对触控面板的操作控制驱动电机的工作模式。
示例性地,胸背训练设备还包括升降架,触控面板连接至升降架的一端,升降架的另一端连接至机架。
示例性地,驱动电机的输出轴还连接有枢转件,训练杆与枢转件相固定,枢转件上设置有第一限位部和第二限位部,驱动电机的壳体上设置有限位配合部,枢转件通过第一限位部与限位配合部的配合、以及通过第二限位部与限位配合部的配合,分别限定出第一极限转动角度及第二极限角度。
示例性地,枢转件包括为第一支架、第二支架和连接支架,第一支架、连接支架和第二支架依次连接以形成U形开口,U形开口的延伸方向与驱动电机的输出轴的中心线满足垂直条件,训练杆包括第一训练杆和第二训练杆,第一训练杆连接至第一支架,第二训练杆连接至第二支架,第一限位部和第二限位部设置在第一支架或/和第二支架上。
示例性地,驱动电机的壳体与机架之间形成有弧形间隙,枢转件被限定为沿着弧形间隙转动。
示例性地,胸背训练设备包括行走轮,行走轮连接至机架。
示例性地,驱动电机为永磁同步电机。
在发明内容中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
以下结合附图,详细说明本发明的优点和特征。
附图说明
本发明的下列附图在此作为本发明的一部分用于理解本发明。附图中示出了本发明的实施方式及其描述,用来解释本发明的原理。在附图中,
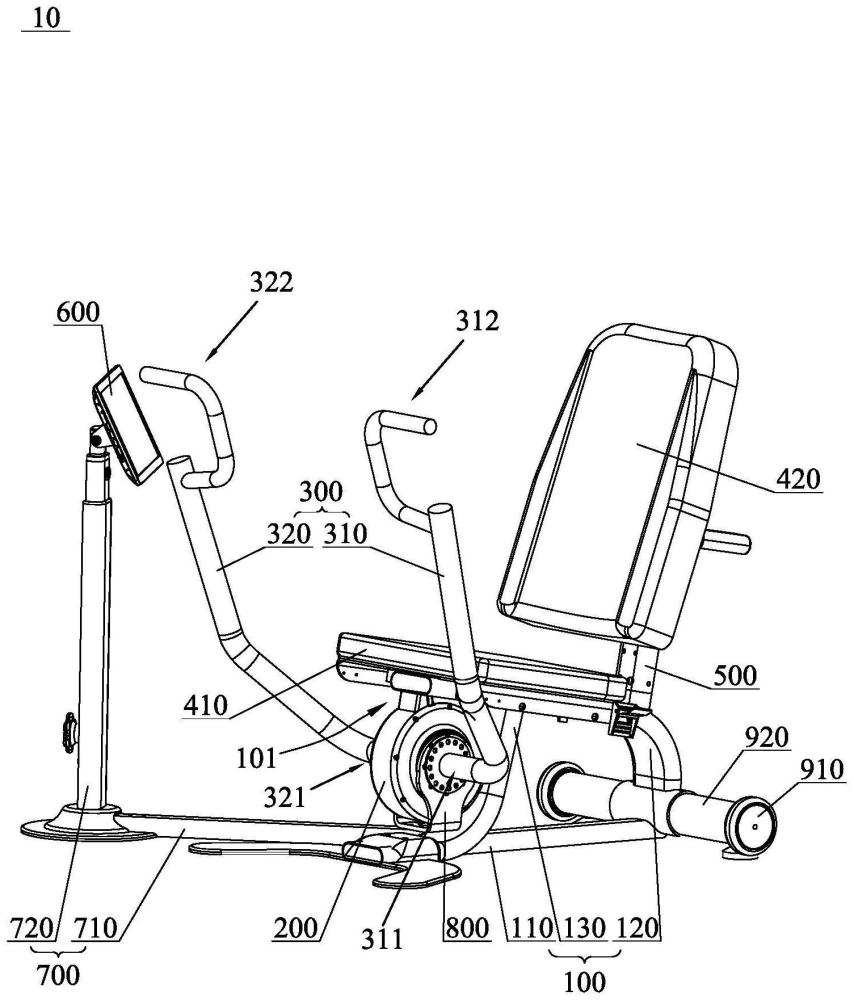
图1为本发明一个示例性实施例的胸背训练设备的立体图;
图2为图1所示的胸背训练设备的另一角度的立体图;
图3为图1所示的胸背训练设备的又一角度的立体图;
图4为图3所示的胸背训练设备的主视图;以及
图5为图3所示的驱动电机和枢转件所形成装配体的立体图。
其中,上述附图包括以下附图标记:
10、胸背训练设备;101、安装空间;102、弧形间隙;100、机架;110、第一架体;111、前支撑部;112、中支撑部;113、后支撑部;120、第二架体;130、加强架体;200、驱动电机;211、限位配合部;300、训练杆;310、第一训练杆;311、第一端;312、第一握持部;320、第二训练杆;321、第一端;322、第二握持部;410、座垫;401、前端;402、后端;420、靠背;500、支撑架;600、触控面板;700、升降架;710、升降立架;720、走线管;800、枢转件;810、第一支架;820、连接支架;830、第二支架;831、第一限位部;832、第二限位部;910、行走轮;920、连接件。
具体实施方式
在下文的描述中,提供了大量的细节以便能够彻底地理解本发明。然而,本领域技术人员可以了解,如下描述仅示例性地示出了本发明的优选实施例,本发明可以无需一个或多个这样的细节而得以实施。此外,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行详细描述。
结合说明书的附图,详细介绍本申请的胸背训练设备。结合参阅图1至图4,根据本发明的胸背训练设备10可以包括机架100、驱动电机200和训练杆300。机架100上可以设置有座垫410。使用者可以坐在座垫410上操作训练杆300进行康复训练,或者坐在座垫410上休息。参阅图1,机架100在座垫410下方形成有安装空间101,驱动电机200可以设置在安装空间101内。
参阅图1,训练杆300可以包括第一端和第二端,第一端(参见下文中第一训练杆310的第一端311,第二训练杆320的第一端321)可以与驱动电机200的输出轴连接,第二端构造成胸背训练时的力作用端。康复训练时,使用者的手可以握持在第二端。
驱动电机200具有第一工作模式和第二工作模式。在第一工作模式下,通过第二端施加作用力带动训练杆300以使驱动电机200以第一功率工作。可以理解的是,在第一工作模式下,使用者的手握持在第二端,通过使用者手部动作产生作用力,进而带动训练杆300以使驱动电机200工作,此时,使用者通过胸背训练设备10进行主动训练,驱动电机200为使用者提供的是阻力,使用者自身施加的作用力与阻力进行相互对抗,进而达到训练的效果。驱动电机200处于第一工作模式时,此时,胸背训练设备10的训练模式适宜胸背受损较小且具有自主运动的使用者。
在第二工作模式下,驱动电机200以第二功率工作使训练杆300向训练者施加作用力。可以理解的是,在第二工作模式下,驱动电机200为训练杆300提供动力,通过训练杆300带动即为使用者提供动力,此时,使用者通过胸背训练设备10进行被动训练,驱动电机200为使用者提供的是动力。驱动电机200处于第二工作模式时,此时,胸背训练设备10的训练模式适宜胸背受损较大且自主运动能力较弱的使用者。
本发明的胸背训练设备10不仅可以为使用者提供主动训练的模式,还可以为使用者提供被动训练的模式。如此,本发明的胸背训练设备10的应用范围较大,受众范围广,大大提高了胸背训练设备10的通用性。而且,驱动电机200位于座垫410的下方的安装空间101,使得驱动电机200无需占用座垫410前方或者侧方的空间,大大缩小了胸背训练设备10的占用空间,便于在特定的场所布置更多数量的胸背训练设备10。
在本发明的一个实施例中,结合参阅图1至图4,机架100可以包括第一架体110和第二架体120,第二架体120连接至第一架体110的上部,座垫410设置在第二架体120上,第一架体110与第二架体120之间形成安装空间101。如此设置,第二架体120可以支撑座垫410;第一架体110与第二架体120之间形成安装空间101,可以理解的是,驱动电机200位于此安装空间101,便于驱动电机200进行散热;同时鉴于此结构可知,第二架体120距离第一架体110具有一定的高度,进而使得座垫410相对于第一架体110与第二架体120两者相连接的部位具有一定的高度差,也可以理解为座垫410具有一定的离地高度,便于使用者舒适地使用座垫410。
在本发明的一个实施例中,参阅图2,第一架体110可以包括依次连接的前支撑部111、中支撑部112和后支撑部113,其中,前支撑部111可以大体呈扩口的U形。中支撑部112的一端可以连接至扩口U形的底部,中支撑部112的另一端可以连接至后支撑部113。如此,前支撑部111可以具有类似于三角形架的稳定性,进而使得第一架体110整体具有更好的支撑力和稳定性。
在未示出的实施例中,机架100可以包括呈四边形结构的第一架体110和呈倒U形结构的第二架体120。机架100的形状可以多种多样,并不限位所描述的上述结构,此处不做赘述。
在本发明的一个实施例中,参阅图2,第二架体120朝第一架体110所在平面的投影位于第一架体110的中轴线上,驱动电机200连接至第二架体120。如此设置,驱动电机200采用的为中间布置的方式,相较于偏置的设置方式,能够进一步提高胸背训练设备10的稳定性;而且,驱动电机200相当于位于座垫410下方的中部区域,相较于偏置的设置方式,可以有效地避免使用者的小腿部或者脚后跟触碰到驱动电机200的外壳或者其他部位。
为了提高机架100的整体强度,在本发明的一个实施例中,参阅图1,机架100还可以包括加强架体130,加强架体130的一端连接至第一架体110,加强架体130的另一端连接至第二架体120。
在本发明的一个实施例中,结合参阅图1至图4,训练杆300可以包括第一训练杆310和第二训练杆320,第一训练杆310和第二训练杆320分别可拆卸地连接至驱动电机200的相对两侧,参阅图1,第一训练杆310具有第一握持部312,第二训练杆320具有第二握持部322,第一握持部312和第二握持部322分别位于座垫410的相对两侧。可以理解的是,第一训练杆310的第一端311可以与驱动电机200的输出轴连接,第二训练杆320的第一端321也可以与驱动电机200的输出轴连接。第一训练杆310的第二端可以构造成胸背训练时的力作用端,第一握持部312可以形成在第一训练杆310的第二端。第二训练杆320的第二端可以构造成胸背训练时的力作用端,第二握持部322可以形成在第二训练杆320的第二端。可拆卸地连接方式包括但不限于通过螺纹连接、卡扣连接等现有技术中已知的各种可拆卸连接方式,以及未来可能出现的各种可拆卸方式,此处不做限定。如此,胸背训练设备10可以仅安装第一训练杆310,或者可以仅安装第二训练杆320,或者同时具有第一训练杆310和第二训练杆320,这样,可以根据不同使用者的具体情况,选择性地拆卸或者安装所需要的那一侧的训练杆300,而且,拆卸或者安装过程快捷方便;还可以根据胸背训练设备10所处的空间大小,选择性地拆卸或者安装所需要的某个训练杆300,以便占用更小的空间。进一步提高了胸背训练设备10的通用性。
在本发明的一个实施例中,结合参阅图1至图4,胸背训练设备10还可以包括靠背420,如此,在训练过程中,使用者可以靠在靠背420上,以便可以在固定的位置上进行更好的动作;而且,当使用者疲惫时,可以倚靠在靠背420上进行休息。
在本发明的一个实施例中,参阅图4,机架100上远离训练杆300的一侧可以连接有支撑架500,座垫410具有前端401和后端402,后端402相比前端401更靠近支撑架500,且后端402低于前端401。可以理解的是,由于座垫410的后端402低于前端401,相较于座垫410后端402与前端401齐平的设置,座垫410后端402低于前端401可以使得坐在座垫410上的使用者的部分身体低于座垫410的前端401,相当于降低了使用者的重心位置,进而提高了训练过程中胸背训练设备10的整体稳定性。
在本发明的一个实施例中,结合参阅图1至图4,支撑架500可以连接至第二架体120的后部,靠背420可以连接至支撑架500背离机架100的一端。
在本发明的一个实施例中,参阅图4,座垫410与水平面具有夹角α,夹角α的范围可以为5°~20°。例如,夹角α可以为5°、10°、11°、12°、13°、14°、15°、20°等。如果夹角α的角度大于20°,对于体重较轻、或者体型较小的使用者,有可能发生倒溜下滑的趋势。如果夹角α的角度小于5°,使用者的重心降低的范围较小,训练过程中胸背训练设备10的整体稳定性的提升作用不够明显。如此,夹角α的范围为5°~20°的设置,既能保证胸背训练设备10在工作时的整体稳定性,也能使得使用者具有良好的舒适度,可以同时兼顾这两个效果。
在本发明的一个实施例中,结合参阅图1至图4,胸背训练设备10可以包括触控面板600和控制模块,控制模块用于响应于操作者对触控面板600的操作控制驱动电机200的工作模式。也就是说,使用者可以根据自身条件通过在触控面板600上进行操作,即通过选择或者设定驱动电机200的工作模式,进而使得胸背训练设备10处于使用者所需要的主动训练模式或者被动训练模式。如此设置,使用者通过在触控面板600上进行操作便能快速方便地选用适合自己的训练模式,也便于进行多种训练模式之间的切换。
在本发明的一个实施例中,触控面板600可以包括显示单元,使用者通过在触控面板600上操作,进而可以在显示单元同步显示出胸背训练设备10的训练模式。
在本发明的一个实施例中,当使用者进行主动训练时,显示单元还可以实时显示使用者的运动频率,运动时长等相关的数据,便于实时监控使用者的身体状况。当某一数据超标时,胸背训练设备10还可给予警示提醒,或者停止运行,以防止用户发生肌肉痉挛或者其他状况。
在本发明的一个实施例中,结合参阅图1至图4,胸背训练设备10还可以包括升降架700,触控面板600可以连接至升降架700的一端,升降架700的另一端可以连接至机架100。如此设置,不同的使用者使用胸背训练设备10时,通过调整升降架700的高度,可以使触控面板600调整到各自舒适的操作高度,进一步提高胸背训练设备10的适用性,提升用户的体验感。
在本发明的一个实施例中,结合参阅图1至图4,升降架700可以包括升降立架710和走线管720,升降立架710的一端连接至触控面板600,升降立架710的另一端与走线管720的一端连接,走线管720的另一端连接至第一架体110,其中,升降立架710可以具有管线通道。控制模块可以位于触控面板600内,控制模块的信号线可以依次穿过管线通道、走线管720与驱动电机200实现电连接。如此,升降立架710和走线管720可以为信号线提供一个固定的通道,避免信号线裸露在地面被磕碰或者刮坏,进而导致传输或者控制信号中断。而且,升降立架710和走线管720与第一架体110连接还可进一步提高胸背训练设备10的整体稳定性。
在本发明的一个实施例中,结合参阅图1至图4,驱动电机200的输出轴还可以连接有枢转件800,训练杆300与枢转件800相固定。参阅图5,枢转件800上还可以设置有第一限位部831和第二限位部832,驱动电机200的壳体上可以设置有限位配合部211,枢转件800通过第一限位部831与限位配合部211的配合、以及通过第二限位部832与限位配合部211的配合,分别限定出第一极限转动角度及第二极限角度。第一限位部831可以为枢转件800上的一部分,也可以与枢转件800为分体结构。同理,第二限位部832可以为枢转件800上的一部分,也可以与枢转件800为分体结构。限位配合部211可以为驱动电机200的外壳的一部分,也可以与外壳为分体结构。在第一限位部831与第二限位部832均为枢转件800的一部分时,第一限位部831和第二限位部832可以为缺口,限位配合部211可以为凸台。或者,第一限位部831和第二限位部832可以为凸台,限位配合部211可以为缺口。第一限位部831和第二限位部832配合至限位配合部211的不同部位。第一限位部831与第二限位部832的形状也可以不同。
当驱动电机200处于第一工作模式,即使用者进行主动训练时,使用者将力作用在训练杆300的第二端使得训练杆300发生转动,训练杆300带动枢转件800一并转动,当枢转件800上的第一限位部831与限位配合部211配合时,此时,枢转件800无法再继续转动,枢转件800转动至第一极限角度,训练杆300被使用者拉回(拉回为以图4和图5为例进行说明的情况下,若在其他实施例中,训练杆300也可以为伸出)至第一极限位置;在拉回至极限位置后,使用者自然会反向向外推动训练杆300,此时,第一限位部831与限位配合部211解除限位,当枢转件800上的第二限位部832与限位配合部211配合时,枢转件800也无法再继续沿着此反方向转动,枢转件800转动至第二极限角度,训练杆300被使用者推出(推出仍为以图4和图5为例进行说明的情况下,若在其他实施例中,训练杆300也可以为拉回)至第二极限位置;进而,使用者继续沿着拉回方向拉动训练杆300,周而复始地进行上述训练。
当驱动电机200处于第二工作模式,即使用者进行被动训练时,驱动电机200的输出轴转动,进而带动枢转件800转动,为训练提供动力,当枢转件800上的第一限位部831与限位配合部211配合时,此时,枢转件800无法再继续转动,枢转件800转动至第一极限角度,训练杆300被驱动电机200转动至拉回的极限位置(拉回为以图4和图5为例进行说明的情况下,若在其他实施例中,训练杆300也可以为伸出),自然,驱动电机200的输出轴也无法继续沿着此方向转动;在拉回至极限位置后,控制模块可以识别出此位置信息,进而控制驱动电机200沿着反向转动,即反向向外推动训练杆300,此时,第一限位部831与限位配合部211解除限位,当枢转件800上的第二限位部832与限位配合部211配合时,枢转件800也无法再继续沿着此反方向转动,枢转件800转动至第二极限角度,训练杆300被驱动电机200推出(推出仍为以图4和图5为例进行说明的情况下,若在其他实施例中,训练杆300也可以为拉回)至另一极限位置;控制模块可以再次识别出此位置信息,进而,再次控制驱动电机200继续沿着拉回方向拉动训练杆300,周而复始地进行上述训练。
基于枢转件800、第一限位部831、第二限位部832、限位配合部211的设置,使得训练杆300具有推出和拉回的极限位置,能有效地确保使用者的操作安全,避免训练杆300拉回过近或者推出过远从而导致拉伤使用者的现象。
在本发明的一个实施例中,参阅图5,枢转件800可以包括为第一支架810、第二支架830和连接支架820,第一支架810、连接支架820和第二支架830依次连接以形成U形开口。U形开口的延伸方向与驱动电机200的驱动轴的中心线满足垂直条件。第一训练杆310可以连接至第一支架810。第二训练杆320可以连接至第二支架830。第一限位部831和第二限位部832设置在第一支架810或/和第二支架830上。第一限位部831可以仅设置第一支架810上、或者设置在第二支架830上、或者设置在第一支架810和第二支架830上。同理,第二限位部832可以仅设置第一支架810上、或者设置在第二支架830上、或者设置在第一支架810和第二支架830上。需要说明的是,第一限位部831和第一限位部831可以均位于第一支架810上、或者均位于第二支架830上、或者其中一个位于第一支架810而另一个位于第二支架830上,此处不做限定。如此设置,枢转件800可以将第一训练杆310和第二训练杆320联动在一起,三者具有同步运行且能被限定在第一极限位置与第二极限位置之间转动,避免训练拉伤;而且,U形开口为驱动电机200提供了容纳空间;U形开口的延伸方向与驱动电机200的驱动轴的中心线满足垂直条件,进一步使得驱动电机200可以径直插入U形开口,进一步节省驱动电机200所占用的空间,大大提高空间的利用率。
在本发明未示出的实施例中,枢转件800还可以为两个独立的板状件或者其他结构件,此处不做说明。
在本发明的一个实施例中,参阅图4,驱动电机200的壳体与机架100之间形成有弧形间隙102,枢转件800被限定为沿着弧形间隙102转动。如此设置,弧形间隙102为枢转件800的转动提供转动空间,而且,弧形间隙102可以更好的适配枢转件800的转动轨迹,能够降低枢转件800转动时所需要占用的安装空间101。
在本发明的一个实施例中,结合参阅图1至图4,胸背训练设备10可以包括行走轮910,行走轮910可以连接至机架100。如此设置,移动和搬运胸背训练设备10时更加方便省力。
在本发明的一个实施例中,行走轮910的数量可以为两个、四个等。当行走轮910的数量为两个时,可以将其设置为后轮。当行走轮910的数量为四个时,可以设置为前后轮。
在本发明的一个实施例中,胸背训练设备10可以包括连接件920,位于后部的两个行走轮910可以分别连接至连接件920的相对两侧,连接件920可以连接至机架100的第一架体110的后支撑部113。
在本发明的一个实施例中,驱动电机200为永磁同步电机。如此设置,当驱动电机200处于第二工作模式时,永磁同步电机提供更大的扭矩,为被动训练提供更好更充分的动力。
在本发明的一个实施例中,永磁同步电机可以为稀土无刷电机,采用直驱的驱动方式。
在本发明的描述中,需要理解的是,方位词如“前”、“后”、“上”、“下”、“左”、“右”、“横向”、“竖向”、“垂直”、“水平”和“顶”、“底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内”、“外”是指相对于各部件本身的轮廓的内外。
为了便于描述,在这里可以使用区域相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述图中所示的一个或多个部件或特征与其他部件或特征的区域位置关系。应当理解的是,区域相对术语不但包含部件在图中所描述的方位,还包括使用或操作中的不同方位。例如,如果附图中的部件被整体倒置,则部件“在其他部件或特征上方”或“在其他部件或特征之上”的将包括部件“在其他部件或构造下方”或“在其他部件或构造之下”的情况。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。此外,这些部件或特征也可以其他不同角度来定位(例如旋转90度或其他角度),本文意在包含所有这些情况。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制如本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、部件、组件和/或它们的组合。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
本发明已经通过上述实施例进行了说明,但应当理解的是,上述实施例只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本发明并不局限于上述实施例,如本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。本发明的保护范围由附属的权利要求书及其等效范围所界定。
- 一种用于胸背推拉训练器的扶手调节装置
- 一种防止拉伤的推胸及拉背儿童专用训练器