一种全能型智能熔炼捞渣机器人
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种全能型智能熔炼捞渣机器人,属于金属熔炼设备技术领域。
背景技术
众所周知,金属熔炼过程中会产生大量的浮渣,漂浮用于熔炼炉内表面或者粘附在炉内壁上,如果不将浮渣清理干净,会影响铁水和铸件质量。而人工捞渣需要捞渣工穿上厚厚地防护工具,用长铁叉往炉外挑渣,这种方式不但挑渣很多次也不干净,且该其过程中火星铁水四溅很不安全。炉内温度能达到1500摄氏度,尤其在夏天炉口周边也达到几百摄氏度,工作环境十分恶劣,也具有一定的危险。而且浮渣具有一定的粘连,会带走一分铁水,也会造成原材料的浪费。
随着技术的不断发展,捞渣机的出现打破了传统的捞渣,工人不需要在炉口进行挑渣,只需要远程遥控,通过机械操作即可捞出炉内浮渣。
比如中国专利CN201220305921.5公开了一种用于金属冶炼的捞渣装置,包括抓斗、竖直升降架、水平输送小车,竖直升降架的下端与抓斗连接、上端与水平输送小车连接,所述竖直升降架内有抓斗驱动气缸,水平输送小车上连接有竖直升降架驱动气缸、水平输送小车驱动气缸,所述抓斗上有漏液孔。本发明采用气动执行元件气缸来驱动抓斗、竖直升降架、水平输送小车的运动,只需配上必要的气动控制元件,就能根据熔炼锅锅面渣位的变化自动控制本装置准确执行捞渣到泄渣的动作过程,操作简单、使用方便。
上述专利所述的捞渣装置虽然能够根据熔炼锅锅面渣位的变化进行捞渣作业,但是在实际使用中仍旧存在以下问题:
1、捞渣作业时,由于上述捞渣设备灵活性差,捞渣机抓手不能全方位的抓取熔炼炉内的浮渣,有些地方经常会抓取不到,从而造成抓取死角,针对抓取死角,需要人工进行清理,费时费力,劳动强度大,且存在较大的安全风险。
2、上述捞渣装置包括捞渣、运渣和泄渣,但是上述机构在运行过程中抖动、震动较为剧烈,运行稳定性差,导致在捞渣过程中,一方面由于机构的震动和抖动,容易出现抓取不准确现象;另一方面,抓手抓取的浮渣很容易因机构的震动、抖动而掉落至熔炼炉内造成铁水飞溅,不但造成铁水的浪费,而且还存在较大的安全风险。在运渣过程中,抓手抓取的浮渣会因机构的震动。抖动而掉落污染生产设备以及生产现场,给后期清理带来困难。
综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
发明内容
本发明要解决的技术问题是针对以上不足,提供一种全能型智能熔炼捞渣机器人,可以提高设备的灵活性,避免捞渣死角;可以提高设备运行的稳定性,有效减轻设备运行过程中的抖动、震动现象,提高抓取准确性,避免因抖动、震动使浮渣掉落引起的铁水飞溅以及设备污染。
为解决以上技术问题,本发明采用以下技术方案:一种全能型智能熔炼捞渣机器人,包括用于执行捞渣的抓取机构、带动抓取机构多方位移动的运行机构、维持抓取机构在移动过程中保持垂直的平衡机构;
所述运行机构一端连接在底座上,另一端与抓取机构连接;所述平衡机构一端与抓取机构连接,另一端与底座连接,所述平衡机构的中部位置与运行机构连接。
进一步地,所述运行机构包括大臂,所述大臂下端铰接在回转盘上,并通过回转支承与第二伺服电机连接;所述大臂上端铰接小臂,所述小臂通过回转支承与第三伺服电机连接,通过第三伺服电机使小臂绕着大臂的上端转动;
所述小臂的前端铰接有连接臂,所述连接臂与抓取机构连接。
进一步地,所述平衡机构包括第二连杆;所述第二连杆为V形,设有前端、后端以及中间三个连接部;所述第二连杆通过中间的连接部转动设置在大臂与小臂的铰接处;所述第二连杆的前端连接部与第一连杆的上端铰接,所述第一连杆的下端铰接在连接臂上;所述第二连杆的后端连接部与第三接杆的上端铰接,所述第三连杆的下端铰接在回转盘上。
进一步地,所述抓取机构为圆形抓手总成,所述圆形抓手总成包括能够开闭的多个抓板,每个抓板的上端与一个第一铰接板铰接,所述第一铰接板的上端铰接在升降盘上,所述升降盘的中心设有升降吊杆,所述升降吊杆与升降油缸连接;
每个抓板的顶端固定有第二铰接板,所述第二铰接板的顶端铰接在固定盘上。
进一步地,所述抓取机构为对开式抓手总成,所述对开式抓手总成包括对称设置的两个抓手,两个抓手与开合机构连接,所述开合机构与油缸的伸缩杆连接;
所述抓手为板式结构或者齿式结构。
进一步地,所述回转盘通过回转支承安装在底座上,并通过第一伺服电机驱动。
进一步地,所述抓板为花瓣形结构,多个抓板沿周向均匀间隔布置,围成圆形;
多个抓板闭合时彼此之间在其侧边处有一部分重叠,形成闭合腔;所述闭合腔为每次抓取浮渣的盛放空间。
进一步地,所述固定盘与升降盘同轴心设置,所述固定盘上对应升降盘的位置开设有贯穿孔;所述贯穿孔为圆形,所述贯穿孔的直径大于升降盘的直径。
进一步地,所述平衡机构还包括平衡缸;所述平衡缸的缸底端铰接在回转盘上,伸缩杆端转动设置在大臂与回转盘的铰接处。
进一步地,所述第一伺服电机第二伺服电机和第三伺服电机均与控制系统连接;所述第二伺服电机和第三伺服电机联动。
本发明采用以上技术方案后,与现有技术相比,具有以下优点:
本发明实现全自动、全智能捞渣,避免捞渣工作中人员的安全隐患;主要适用于钢,铁,铜,铝,以及各种有色金属,熔炼过程中的废渣清理。
本发明中的运行机构的设置,能够通过第二伺服电机和第三伺服电机的联动,使运行机构带动抓取机构实现等距离上下运动,以及等高度前后运动,且在第二伺服电机不动作的情况下,第三伺服电机独立动作带动抓取机构实现上下运动,可以实现抓取机构的多方位移动,提高了设备灵活性,避免了捞渣死角,且可以提高设备运行的稳定性,有效减轻设备运行过程中的抖动、震动现象,提高抓取准确性,避免因抖动、震动使浮渣掉落引起的铁水飞溅以及设备污染。
本发明平衡机构的设置可以在运行机构动作过程中,通过第一连杆、第二连杆、第三连杆的联动,保证抓取机构在移动过程中始终保持垂直状态,以保证抓取的准确性。
本发明中的圆周抓手总成还可以用于清理炉内壁上的炉渣,增加了设备适用范围,提高了社会效益。
本发明的抓取机构可以是圆抓手也可以是对开式抓手,进一步提高了设备的灵活性,以及设备的利用率,降低了设备投入。
本发明采用伺服电机和回转支承的方式驱动设备零部件的旋转,该种方式运行精确性高,进一步提高了设备运行的稳定性。
本发明抓取机构在旋转机构的带动下,能够实现360°旋转,进一步提高了设备的灵活性。
下面结合附图和实施例对本发明进行详细说明。
附图说明
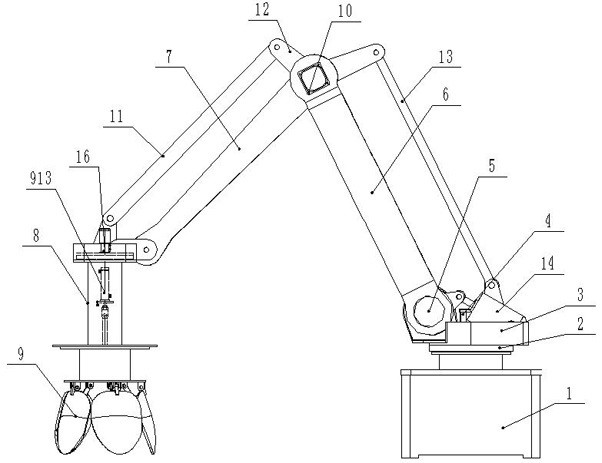
图1是实施例1的结构示意图;
图2是实施例1中圆抓手总成的结构示意图;
图3是实施例1中圆抓手总成的剖视图;
图4是实施例1中圆抓手总成的仰视图;
图5是实施例1中圆抓手总成的俯视图;
图6是实施例2的结构示意图;
图7是实施例2中对开式抓手总成的结构示意图;
图8是实施例3的结构示意图;
图中,
1-底座,2-回转支承,3-回转盘,4-第一伺服电机,5-第二伺服电机,6-大臂,7-小臂,8-连接臂,9-圆抓手总成,91-升降吊杆,92-升降盘,93-固定盘, -94第一铰接板,95-抓板,96-第一耳板,97-第一铰轴,98-第二耳板,99-第二铰轴,910-第三耳板,911-第三铰轴,912-第二铰接板,913-升降油缸;10-第三伺服电机,11-第一连杆,12-第二连杆,13-第三连杆,14-平衡缸,15-对开式抓手总成,151-抓手,152-开合机构,153-油缸,154-打渣抓手,155-固定架,16-旋转机构。
具体实施方式
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式。
实施例1
如图1-5共同所示,本实施例提供一种全能型智能熔炼捞渣机器人,包括用于执行捞渣的抓取机构、带动抓取机构多方位移动的运行机构、维持抓取机构在移动过程中保持垂直的平衡机构;所述运行机构一端连接在底座1上,另一端与抓取机构连接,所述平衡机构一端与抓取机构连接,另一端与底座1连接,所述平衡机构的中部位置与运行机构连接。
所述底座1固定在地面上,所述底座1上安装有回转支承2,所述回转支承2上安装有回转盘3;所述回转支承2与第一伺服电机4连接,通过第一伺服电机4驱动回转支承2带动回转盘3转动,使设备实现360°旋转。
所述运行机构包括大臂6,所述大臂6的下端铰接在回转盘3上,并通过回转支承与第二伺服电机5连接,所述第二伺服电机5安装在回转盘3上,通过第二伺服电机5驱动大臂6转动;所述大臂6的上端铰接小臂7,所述小臂7通过回转支承与第三伺服电机10连接,通过第三伺服电机10使小臂7绕着大臂6的上端转动;所述小臂7的前端通过固定座铰接有连接臂8,所述连接臂8为圆筒型结构,所述连接臂8与抓取机构连接。
所述平衡机构包括第一连杆11、第二连杆12和第三连杆13,所述第二连杆12为V形,包括前端、后端以及中间的三个连接部,所述第二连杆12通过中间的连接部转动设置在大臂6与小臂7的铰接处;所述第二连杆12的前端连接部与第一连杆11的上端铰接,所述第一连杆11铰接在连接臂8上;所述第二连杆12的后端连接部与第三接杆13的上端铰接,所述第三连杆13铰接在回转盘3上。
所述平衡机构还包括平衡缸14,所述平衡缸14的缸底端铰接在回转盘3上,伸缩杆端转动设置在大臂6与回转盘3的铰接处。
所述第一伺服电机4、第二伺服电机5和第三伺服电机10均与控制系统连接;所述第二伺服电机5和第三伺服电机10可以联动。
所述捞渣机器人还包括旋转机构16,所述旋转机构16与连接臂8连接,通过旋转机构16带动连接臂8旋转,从而带动抓取机构旋转360°;所述旋转机构16包括与连接臂8连接的回转支承,以及驱动回转支承转动的回转马达,所述回转支承和回转马达均设在固定座上。
所述抓取机构为圆抓手总成9,所述圆抓手总成9包括多个抓板95,所述抓板95为花瓣形结构,多个抓板95沿周向均匀间隔布置,围成圆形;所述抓板95的数量根据实际圆形抓手总成的尺寸变化情况确定;多个抓板95能同时向内收拢闭合或向外张开,实现抓手的抓放动作。
多个抓板95闭合时彼此之间在其侧边处有一部分重叠,形成闭合腔;所述闭合腔作为每次抓取浮渣的盛放空间;因此抓手闭合时,可以保证抓取的浮渣不会洒落,避免捞渣过程浮渣掉入熔炼炉内产生铁水飞溅。
多抓板95通过开合机构向内闭合或者向外张开,所述开合机构包括升降盘92和多个第一铰接板94,所述第一铰接板94的数量与抓板95数量相同,所述第一铰接板94的上端铰接在升降盘92的底部;具体的,所述第一铰接板94为长形结构,所述第一铰接板94的一端通过第一铰轴97与第一耳板96上,所述第一耳板96固定在升降盘92的底部。
每个第一铰接板94的下端与一个抓板95的上端铰接;具体的,每个抓板95的上端内侧均设有第二耳板98,所述第一铰接板94的下端通过第二铰轴99铰接在第二耳板98上。
每个抓板95的顶端固定有第二铰接板912,所述第二铰接板912的顶端通过第三铰轴911铰接在第三耳板910上,所述第三耳板910固定在固定盘93的底部,所述固定盘93固定连接臂8的下端。
所述固定盘93与升降盘92同轴心设置,所述固定盘93上对应升降盘92的位置开设有圆形的贯穿孔,所述贯穿孔的直径大于升降盘92的直径。
所述升降盘92的中心位置固定连接有升降吊杆91,所述升降吊杆91与升降油缸913的伸缩端固定连接,所述升降油缸913及升降吊杆91均设置在连接臂8的内腔中。
升降油缸913伸缩,使升降吊杆91的通过升降盘92带动多个第一铰接板94同步向上或者向下移动,从而通过第一铰接板94以及第二铰接板912构成的铰链结构,使多个抓板同时向内闭合或者向外张开,以实现抓手的取放功能。
本发明的工作原理:
工作时,第一伺服电机4通过驱动回转支承2带动回转盘3转动,使运行机构和抓取机构一起实现360°旋转。
第二伺服电机5驱动大臂6旋转,第三伺服电机10驱动小臂7绕大臂6上端旋转,通过第二伺服电机5和第三伺服电机10联动,使运行机构带动抓取机构实现等距离上下运动,以及等高度前后运动;并且还可以在第二伺服电机不动作的情况下,第三伺服电机独立动作带动抓取机构实现上下运动,从而实现抓取机构的多方位移动,便于调整抓取机构的准确抓取位置,便于捞渣作业。
本发明中圆抓手在捞取炉内浮渣时,首先通过运行机构带动圆形抓手总成到准确的抓取位置,然后通过升降油缸缩回和伸出,使升降吊杆带动升降盘向上或向下移动,升降盘上移或下移过程中,通过第一铰接板、第二铰接板构成的铰链结构带动多个抓板同时向内收拢抓取浮渣;然后通过运行机构带动圆形抓手总成升高,并配合第一伺服电机,将浮渣转运至预定的泄渣区,多个抓板同时向外张开,完成泄渣,然后进入下一个作业循环。
本实施例中的圆周抓手总成还可以用于清理炉内壁上的炉渣,圆周抓手总成通过运行机构伸到炉口内紧贴炉壁,然后通过运行机构与升降油缸配合动作,沿炉壁向下抓取即可清理炉壁上的炉渣。
实施例2
如图6-7共同所示,本实施例提供一种全能型智能熔炼捞渣机器人,本实施例与实施例1的区别在于,所述抓取机构为对开式抓手总成15,所述对开式抓手总成15包括对称设置的两个抓手151,两个抓手151与开合机构152连接,通过开合机构152实现张开和闭合,所述开合机构152与油缸153的伸缩杆连接,通过油缸153驱动开合机构152动作,以实现对开式抓手总成15的开闭。
所述开合机构152设置在固定架155上,所述固定架155固定在连接臂8上,以经对开式抓手总成15连接在运行机构上。
所述对开式抓手总成15还包括两个对称设置的打渣抓手154,所述打渣抓手154设置在两个抓手151的上方,每个打渣抓手154对应一个抓手设置;所述打渣抓手154也连接在开合机构152上,随着开合机构152带动抓手151张开,所述打渣抓手154向下拍打粘附在抓手151上的浮渣,使其脱落。
所述抓手151和打渣抓手154均为板式结构。
实施例3
如图8所示,本实施例提供一种全能型智能熔炼捞渣机器人,本实施例与实施例2的区别在于,所述抓手151和打渣抓手154均为齿式结构。
本发明所述捞渣机器人可以采用液压、电动、气动、机械为动力实现遥控操作,实现自动化操作,实现远距离捞渣;主要适用于钢,铁,铜,铝,以及各种有色金属,熔炼过程中的废渣清理。
本发明中的运行机构的设置,能够通过第二伺服电机和第三伺服电机的联动,使运行机构带动抓取机构实现等距离上下运动,以及等高度前后运动,且在第二伺服电机不动作的情况下,第三伺服电机独立动作带动抓取机构实现上下运动,可以实现抓取机构的多方位移动,提高了设备灵活性,避免了捞渣死角,且可以提高设备运行的稳定性,有效减轻设备运行过程中的抖动、震动现象,提高抓取准确性,避免因抖动、震动使浮渣掉落引起的铁水飞溅以及设备污染。
本发明平衡机构的设置可以在运行机构动作过程中,通过第一连杆、第二连杆、第三连杆的联动,保证抓取机构在移动过程中始终保持垂直状态,以保证抓取的准确性。
本发明中的圆周抓手总成还可以用于清理炉内壁上的炉渣,增加了设备适用范围,提高了社会效益。
本发明的抓取机构可以是圆抓手也可以是对开式抓手,进一步提高了设备的灵活性,以及设备的利用率,降低了设备投入。
本发明采用伺服电机和回转支承的方式驱动设备零部件的旋转,该种方式运行精确性高,进一步提高了设备运行的稳定性。
本发明抓取机构在旋转机构的带动下,能够实现360°旋转,进一步提高了设备的灵活性。
以上所述为本发明最佳实施方式的举例,其中未详细述及的部分均为本领域普通技术人员的公知常识。本发明的保护范围以权利要求的内容为准,任何基于本发明的技术启示而进行的等效变换,也在本发明的保护范围之内。