基于涡喷发动机的动力增程滑翔飞行器定速巡航调节方法
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及一种基于涡喷发动机的动力增程滑翔飞行器定速巡航调节方法,属于无人机、巡航导弹飞行控制技术领域。
背景技术
随着防空技术的进步,“防区”的范围也随之扩大,战场对有动力滑翔飞行器需求较大,各国也非常重视能够在防区外发射有动力滑翔飞行器的研发。常规无动力大翼展滑翔飞行器升阻比Kn较大(可达7-8),其滑翔能力很强,能够实现较远的攻击范围,射程范围可达20~120km。动力增程滑翔飞行器是一种在常规无动力大翼展滑翔飞行器基础上改进加装发动机以实现防区外攻击的飞行器,增加射程,提升飞机的战场生存能力。有动力滑翔飞行器的射程能够从无动力的100km提升到300km以上。
无人机、巡航导弹、动力增程滑翔飞行器通常采用涡喷发动机发动机为其提供动力,但是由于成本原因,部分巡航导弹、动力增程滑翔飞行器采用简易控制涡喷发动机提供飞行动力。简易控制涡喷发动机的转速指令不适宜频繁快速改变。为保证飞行器能够实现长时间定速巡航,需要飞行器控制系统设计发动机转速指令。现有的发动机转速控制指令通常采用离线计算定速巡航飞行条件的方式来设置常值的开环发动机折合转速指令。但是由于离线计算采用的气动力参数、发动机推力存在不精确以及飞行过程中存在风场干扰,因此实际巡航飞行过程中飞行器的速度可能出现持续微小减速或加速。若长时间巡航飞行,飞行速度范围可能超出预先设计范围,导致飞行器飞行马赫数过小导致失速,或飞行器发飞行马赫数过大导致结构无法承受。
为了稳定动力增程滑翔飞行器巡航速度,提出一种根据在线测量飞行器轴向加速度和估计伪马赫数的发动机转速指令闭环调节控制方案。北京动力机械研究所卢彬等提出了一种微型涡喷发动机变增益转速闭环控制方法,此方法能够保证在不同来流、不同工况下发动机转速控制指标的一致性。但是此方法仅能实现发动机自身的转速闭环控制,不能实现飞行器的巡航速度控制。在舰载机自动着舰中,采用进场功率补偿器进行速度闭环控制,这种方法要求发动机具有连续转速控制能力,并且控制系统设计复杂。目前还没有相关资料提及基于发动机转速指令分段调节实现飞行器定速巡航控制的方法。
发明内容
本发明的目的是为了解决采用低成本涡喷发动机的动力增程滑翔飞行器巡航速度控制问题,提供一种基于涡喷发动机的动力增程滑翔飞行器定速巡航调节方法。该方法针对使用无法进行转速频繁改变的涡喷发动机应用于飞行器定速巡航的需求,利用组合导航测量的飞行器加速度和速度信息,提出一种基于飞行器等效加速度和伪马赫数反馈的涡喷发动机转速指令调节方案,以实现动力增程滑翔飞行器定速巡航。
本发明的目的是通过下述技术方案实现的。
基于涡喷发动机的动力增程滑翔飞行器定速巡航转速指令调节方法,具体实现步骤如下:
步骤一、获取巡航阶段组合导航输出的弹体系下的轴向过载A
所述组合导航系统输出的弹体系的过载A
步骤二、计算得到地面系下导弹飞行加速度A
步骤三、计算得到飞行弹道倾角θ。
步骤四、计算得到近似马赫数pseudoMa。具体为:
其中,V为合成速度、T
步骤五、以标称巡航速度Ma
步骤5.1由平飞时升力与重力平衡得到平衡攻角α
其中W为飞行器所受重力,V
步骤5.2通过二维线性插值得到平衡攻角飞行下,飞行器阻力系数。
C
f
步骤5.3利用推力与阻力平衡计算得到平飞需用推力T
步骤5.4利用发动机折合转速与发动机推力之间的关系插值得到平飞标称折合转速N
N
f
步骤六、在导弹巡航段初始时刻根据导弹投放点海拔高度H
若巡航高度H
N
否则,
N
其中floor为取整函数,M
步骤七、计算得到导弹实际巡航阶段的加速度acc
acc
其中g为重力常数。
步骤八、弹载计算机记录发动机转速调节时刻T
步骤九、判断当前滚转角速度绝对值|ω
步骤十、若发动机转速调节标志位N_Cmd_adap为1且滚转标志位roll_flag为0,则根据步骤八记录的导弹飞行当前加速度以及飞行马赫数与期望飞行马赫数Ma
N
其中,N
通过上述步骤的操作,即可得到动力增程滑翔飞行器定速巡航涡喷发动机转速调节值N
所述组合导航系统为GPS和INS组合导航系统。
有益效果
本发明提供了一种动力增程滑翔飞行器定速巡航涡喷发动机转速指令调节方法,通过在大周期采样时刻根据测量信息闭环调节发动机转速指令,可以将飞行器巡航速度控制在一定的范围内,并且不需要发动机具有连续转速控制能力,方法简单易行。
附图说明
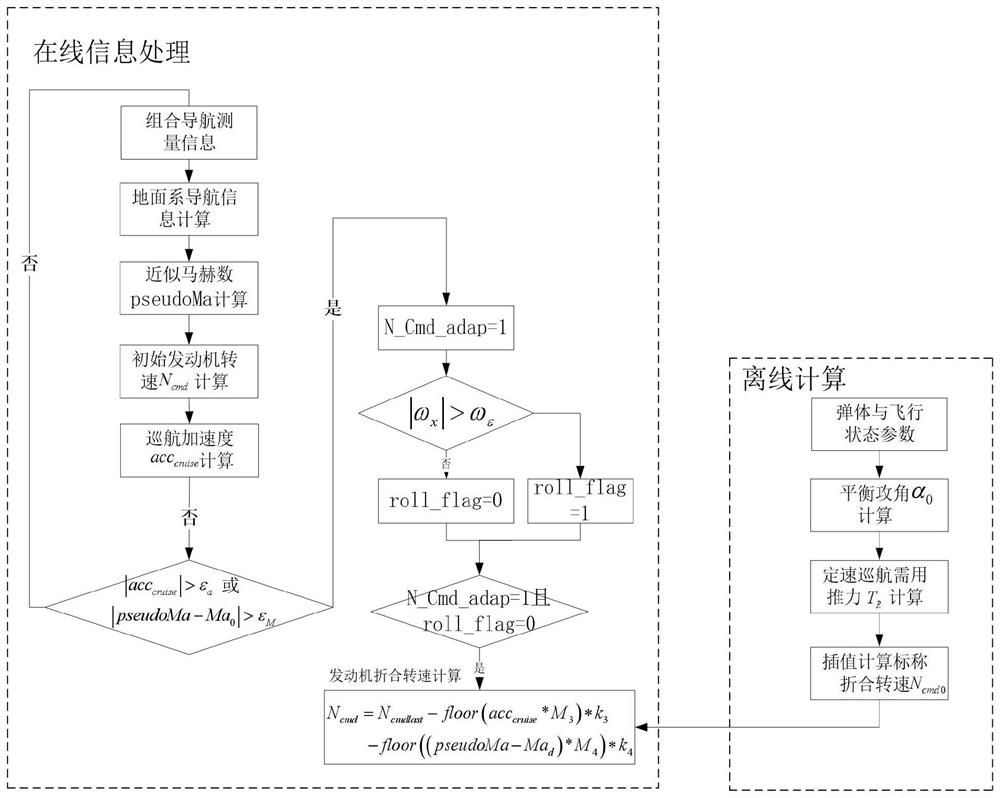
图1为具体实施方式中动力增程滑翔飞行器定速巡航涡喷发动机转速指令计算方法流程示意图;
图2为具体实施方式中动力增程滑翔飞行器全程飞行马赫数;
图3为具体实施方式中动力增程滑翔飞行器发动机转速指令调节值;
具体实施方式
下面结合附图对本发明作进一步的说明。
如图1所示,基于涡喷发动机的动力增程滑翔飞行器定速巡航转速指令调节方法,具体实现步骤如下:
步骤一、导弹的弹体参数与飞行状态参数如表1所示,根据任务确定投放点海拔高度为H
表1弹体与飞行状态参数
步骤二、利用推力与阻力平衡条件计算定速巡航需用推力T
步骤三、利用发动机折合转速与发动机推力之间的关系插值得到平飞标称折合转速N
N
步骤四、飞行过程中,利用组合导航系统测量得到弹体系下的轴向过载A
步骤五、计算得到地面系下导弹飞行加速度A
计算得到的A
步骤六、假定导航测得的V
计算得到的θ=-0.7°。
步骤七、计算近似马赫数pseudoMa。具体为:
计算得到近似马赫数pseudoMa=0.737Ma。
步骤八、设计参数M
巡航高度H
N
其中floor为取整函数。
步骤九、利用下式计算导弹实际巡航阶段的加速度acc
acc
得到acc
步骤十、取系数ε
步骤十一、预设的滚转角速度阈值ω
步骤十二、取系数M
N
=17590-600-150=16840
通过上述步骤的操作,即可得到动力增程滑翔飞行器定速巡航涡喷发动机转速调节值N
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于涡喷发动机的动力增程滑翔飞行器定速巡航调节方法
- 基于涡喷发动机的动力增程滑翔飞行器定速巡航调节方法