一种电火花焊机焊接定位平台及焊接工艺
文献发布时间:2023-06-19 09:32:16
技术领域
本申请涉及装夹平台的领域,尤其是涉及一种电火花焊机焊接定位平台及焊接工艺。
背景技术
焊接也成为熔接,是一种以加热方式接合金属的制造工艺及技术,具有将不同工件进行固定连接的作用,连接强度较好,依据其优良特性,焊接工艺在工业生产中应用广泛。
目前,相关技术中存在一种置物架层片,其主要包括管料以及架体,架体用于存放物体,其中,架体包括托盘以及焊接固定于托盘周缘的侧挡,侧挡处设置有缺口,管料在安装时,管料容置于侧挡的缺口处,并且通过焊接的方式将管料与侧挡相固定,使管料安装于架体的周缘处。另外,通过在管料内穿设安装支撑杆,支撑杆以及若干层置物架层片可结合形成置物架,支撑杆对置物架层片进行支撑,使架体的托盘上可放置物品,实现置物架的置物功能。
针对上述中的相关技术,在对置物架层片进行加工时,通常采用焊接机器手对管料以及架体进行焊接固定,在实际操作过程中,一副架体上通常需要焊接多个管料,多个管料以及架体在摆放时存在定位偏差较大的缺陷,造成焊接效果不好,需要多次反复焊接加工。
发明内容
为了提升管料与架体之间的焊接精度,本申请提供一种电火花焊机焊接定位平台及焊接工艺。
第一方面,本申请提供的一种电火花焊机焊接定位平台采用如下的技术方案:
一种电火花焊机焊接定位平台,包括机架、设置于所述机架上的若干个管料夹持部以及若干个架体夹持部;若干个架体夹持部均匀布置于所述机架上,所述架体夹持部的顶部用于与托盘相抵接,若干个所述架体夹持部用于沿着侧挡的周向方向对侧挡两侧夹持固定;所述管料夹持部设置于所述机架上,所述架体夹持部与所述管料夹持部相互正对,所述管料夹持部用于对管料夹持固定。
通过采用上述技术方案,均匀布置于机架上的架体夹持部以及托盘相抵接,使得托盘在摆放时得到均匀承托,使得架体不易产生上下偏移,同时,若干个架体夹持部对侧挡在周向方向上进行夹持固定,使得架体不易产生左右偏移,提升了架体焊接时的定位精度,另外,管料夹持部对管料进行夹持定位,相互正对的管料夹持部以及架体夹持部可将侧挡与管料相互正对,通过预先调整焊接位置,以得到侧挡与管料之间相对的位置关系,此时,分别得到定位的侧挡以及管料可在焊接机器手的作用下进行焊接固定,在焊接期间,侧挡以及多个管料不易产生晃动及相对偏移,提升了架体以及管料之间的焊接准度。
优选的,所述管料夹持部包括下压组件以及承载组件,所述承载组件用于供管料放置,所述下压组件与所述承载组件相邻,所述下压组件用于下压管料以使承载组件与下压组件将管料的两端夹持固定。
通过采用上述技术方案,将管料放置于承载组件上,即可实现管料的初步定位,承载组件此时对管料进行承托,并且在下压组件以及承载组件相互配合的作用下,管料的两端得到夹持固定,进而实现管料的夹持定位。
优选的,所述下压组件包括第一线性气缸、连杆以及下压块,所述第一线性气缸固定连接于所述机架上,所述第一线性气缸的活塞杆竖直朝上设置,所述连杆的一端转动连接于所述下压块的中部,所述连杆的另一端转动连接于所述第一线性气缸上,所述下压块的一端与所述第一线性气缸的活塞杆转动连接,所述下压块的另一端相对于所述承载组件靠近或远离。
通过采用上述技术方案,启动第一线性气缸,第一线性气缸的活塞杆驱动下压块的一端向上移动,在连杆的运动限位下,下压块的另一端向下转动,此时下压块相对于所述承载组件靠近或远离,实现了下压夹持动作,过程方便快捷。
优选的,所述承载组件包括承载座以及第二线性气缸,所述第二线性气缸固定连接于所述机架上,所述第二线性气缸的活塞杆竖直朝上设置,所述承载座固定连接于所述第二线性气缸的活塞杆上,所述承载座位于所述下压组件的正下方。
通过采用上述技术方案,承载座可用于供管料摆放,通过启动第二线性气缸,第二线性气缸可驱动承载座竖向移动,以使承载座将管料推送至下压组件处,向上对管料施加夹持力,同时将管料推送到合适高度,提升了管料在焊接时的位置精度。
优选的,承载座包括底座以及设置于所述底座顶部的定位凸台,所述定位凸台用于供管料套接定位。
通过采用上述技术方案,底座可供管料的底部进行摆放,实现对管料的承托,同时,将管料套接至定位凸台内,定位凸台可对管料进行限位,使管料不易产生偏移,提升了管料摆放于承载座时的稳定性。
优选的,所述架体夹持部包括驱动件、第一夹块以及第二夹块,所述驱动件设置于所述机架上,所述驱动件分别与所述第一夹块以及第二夹块固定连接,所述驱动件用于驱动所述第一夹块以及所述第二夹块沿水平方向相互靠近或远离,所述第一夹块的顶部用于与托盘相抵接。
通过采用上述技术方案,第一夹块对托盘起到支撑作用,通过启动驱动件,驱动件驱动第一夹块以及第二夹块沿水平方向相互靠近或远离,使第一夹块与第二夹块对侧挡进行夹持及松脱。
优选的,所述驱动件为气动手指,所述第一夹块以及所述第二夹块分别固定连接与所述气动手指的两个夹指上。
通过采用上述技术方案,气动手指的同步性、快捷性及控制性较好,第一夹块以及第二夹块安装于气动手指的两个夹指上可进行同步运动,贴合实际使用工况。
优选的,所述架体夹持部位于所述下压块的下方,所述下压块远离所述第一线性气缸的活塞杆的一端固定连接有用于与托盘顶部抵接的抵接块。
通过采用上述技术方案,在下压块向下夹持管料的过程中,抵接块与架体顶部抵接,此时抵接块与架体夹持部对托盘进行夹持,减少架体因焊接带来的振动,提升了架体焊接时的稳定性,进一步提升了侧挡与管料之间的焊接精度。
优选的,所述管料夹持部与所述架体夹持部之间相邻。
通过采用上述技术方案,管料夹持部通常靠近缺口,此时将管料夹持部以及架体夹持部呈相邻设置,使得架体夹持部对靠近缺口处的侧挡进行夹持固定,在焊接时不易产生晃动或抖动,焊接位置的焊接精度得到提升。
第二方面,本申请提供的一种电火花焊机焊接定位平台焊接工艺采用如下的技术方案。
一种电火花焊机焊接定位平台焊接工艺,包括以下步骤:
S1:将焊接定位平台摆放至焊接机器手旁边;
S2:将架体以及管料装夹于焊接定位平台上;
S3:调试焊接机械手,记录焊点位置并进行加工编程;
S4:通过编程程序启动机械手对多个焊点依次焊接固定,得到置物架层片;
S5:将置物架层片从焊接定位平台处取出;
S6:再次将料架以及管料装夹于焊接定位平台上,在焊接机械手的作用下将置物架层片焊接成型,随后将置物架层片从焊接平台上取出;
S7:重复步骤S6。
通过采用上述技术方案,在焊接定位平台的定位下,提升焊接时,架体以及管料之间的焊接精度,减少二次加工的情况,提升了焊接加工的效率及精度。
综上所述,本申请包括以下至少一种有益技术效果:
1、在均匀布置于的架体夹持部的作用下,托盘在摆放时得到均匀承托,并且若干个架体夹持部对侧挡在周向方向上进行夹持固定,使得架体不易产生偏移,提升了架体焊接时的定位精度,另外,相互正对的管料夹持部以及架体夹持部可将侧挡与管料相互正对,分别得到定位的侧挡以及管料可在焊接机器手的作用下进行焊接固定,在焊接期间,侧挡以及管料不易产生晃动及相对偏移,提升了架体以及管料之间的焊接准度;
2、呈相邻设置的管料夹持部以及架体夹持部,使架体夹持部对靠近缺口处的侧挡进行夹持固定,侧挡与架体夹持部在焊接时不易产生晃动或抖动,焊接位置的焊接精度得到提升;
3、在焊接定位平台的定位下,提升架体以及管料之间的焊接精度,减少二次加工的情况,提升了焊接加工的效率及精度。
附图说明
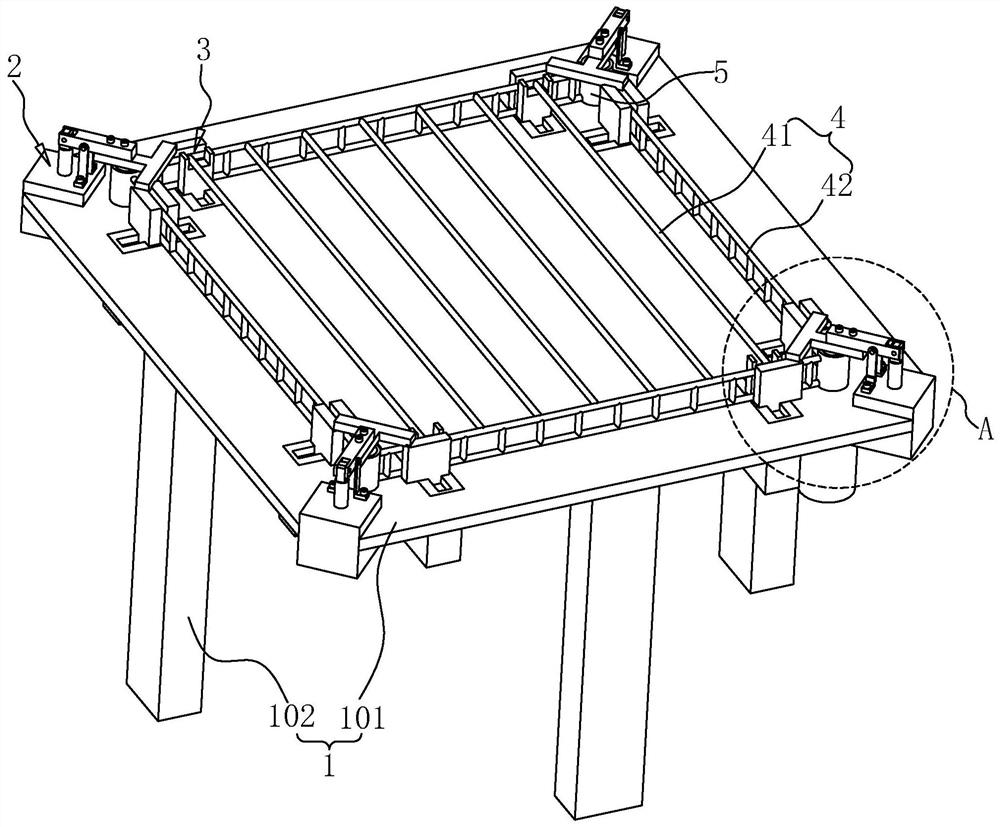
图1是本申请电火花焊机焊接定位平台的整体结构示意图。
图2是图1中A部分的放大图。
图3是本申请中承载组件的结构示意图。
图4是本申请中下压块与抵接块之间的结构示意图。
附图标记说明:1、机架;101、台板;102、竖杆;2、管料夹持部;21、下压组件;211、第一线性气缸;212、连杆;213、下压块;2131、抵接块;22、承载组件;221、承载座;2211、底座;2212、定位凸台;222、第二线性气缸;3、架体夹持部;31、驱动件;32、第一夹块;33、第二夹块;4、架体;41、托盘;42、侧挡;5、管料。
具体实施方式
以下结合附图1-4对本申请作进一步详细说明。
本申请实施例公开一种电火花焊机焊接定位平台。参照图1,该定位平台包括机架1、管料夹持部2以及架体夹持部3,管料夹持部2设置于机架1上,管料夹持部2用于对管料5夹持固定,架体夹持部3设置于机架1上,架体4用于将侧挡42相对的两侧夹持固定,并且架体夹持部3的顶部与托盘41相抵接,架体夹持部3对架体4进行承托,架体夹持部3与管料夹持部2相互正对。其中,在对架体4进行夹持固定时,托盘41沿水平方向设置,侧挡42翻转至托盘41的底部,相互正对的管料夹持部2以及架体夹持部3使得侧挡42与管料5相互正对并相互对接,实现托盘41与侧挡42之间的相互定位,随即可对管料5与侧挡42焊接固定,最终得到置物架层片。
参照图1,机架1在本实施例中包括台板101以及竖杆102,台板101沿水平方向设置,竖杆102至少为三根,台板101可以通过焊接固定的方式固定于竖杆102的顶部,管料夹持部2以及架体夹持部3均安装于台板101上。
参照图1,管料夹持部2以及架体夹持部3均为若干个,若干个架体夹持部3均匀布置于机架1上,若干个架体夹持部3用于沿着侧挡42的周向方向对侧挡42两侧夹持固定,若干个架体夹持部3对侧挡42在周向方向上进行夹持固定,使得架体4不易产生左右偏移,提升了架体4焊接时的定位精度,并且若干个管料夹持部2用于对置物架层片上的若干个管料5同时进行夹持定位,装夹效率较高。
管料夹持部2以及架体夹持部3的具体设置数量可以及实际需要作对应设置,在本实施例中,架体4的外缘轮廓呈矩形设置,并且架体4侧挡42的四个角上分别形成缺口,四个缺口内对应安装四个管料5,此时,架体夹持部3的数量设置为八个,八个架体夹持部3均分为四组,每组架体夹持部3分别对侧挡42的一侧进行夹持固定,进而使得架体4四周得到夹持固定;另外,管料夹持部2设置为四组,管料夹持部2用于一一对应地对四个管料5进行固定,管料夹持部2呈矩形排布,如此与侧挡42上呈矩形排布的四个缺口相对应,管料夹持部2与架体夹持部3之间相邻,更具体的说,一个管料夹持部2与两个不同组间的架体夹持部3相邻,三者呈三角排布,呈相邻设置的管料夹持部2以及架体夹持部3使架体夹持部3可对靠近缺口处的侧挡42进行夹持固定,在焊接时,侧挡42不易产生晃动或抖动,以达到提升焊接精度的作用。
另外,架体4的外缘轮廓也可以呈圆形、六边形、等腰梯形或者其余不规则形状,置物架层片上的管料5也可以为五个、八个、十个等,管料夹持部2以及架体夹持部3的具体设置数量以及具体排布方式可依据架体4的外缘形状以及管料5的具体数量作适应性的排布以及调整,此处不对管料夹持部2以及架体夹持部3的具体设置数量以及排布方式作限制。
参照图2,具体的,管料夹持部2包括下压组件21以及承载组件22,承载组件22用于供管料5放置,承载组件22对管料5进行承托,管料5放置时呈竖向设置,管料5的底部与承载组件22相抵接,下压组件21与承载组件22相邻,下压组件21用于下压管料5以使承载组件22与下压组件21将管料5的两端夹持固定,如此实现管料5的夹持定位。
其中,下压组件21包括第一线性气缸211、连杆212以及下压块213,第一线性气缸211固定安装于机架1的台板101上,第一线性气缸211的活塞杆竖直朝上设置,连杆212的一端转动连接于下压块213的中部,通常,连杆212可以通过铰接的方式转动连接于下压块213中,在本实施例中,连杆212的数量为两根,两根连杆212分别铰接于下压块213相对的两侧,并且两根连杆212相互平行;另外,连杆212的另一端转动连接于第一线性气缸211上,其中,可以在第一线性气缸211上安装轴承座,连杆212另一端通过铰接于轴承座上实现与第一线性气缸211之间的转动连接;下压块213的一端与第一线性气缸211的活塞杆转动连接,在本实施例中,下压块213与第一线性气缸211的活塞杆通过铰接的方式实现转动连接,启动第一线性气缸211,第一线性气缸211的活塞杆驱动下压块213的一端上下移动,在连杆212的运动限位下,下压块213的另一端上下转动,此时,下压块213位于承载组件22的正上方,在下压块213运动的过程中,下压块213的另一端相对于承载组件22靠近或远离,直至下压块213与管料5的顶部抵接,下压块213实现对管料5实现夹持。
参照图2和图3,承载组件22包括承载座221以及第二线性气缸222,第二线性气缸222固定安装于机架1的台板101底部,第二线性气缸222的活塞杆竖直朝上设置,台板101上贯穿设置有通孔,第二线性气缸222的活塞杆经由台板101的通孔贯穿台板101。
第二线性气缸222的活塞杆与承载座221相连,具体的,承载座221包括底座2211以及设置于底座2211顶部的定位凸台2212,其中,在本实施例中,底座2211与定位凸台2212均呈圆柱体状设置,底座2211的一端与定位凸台2212的一端相连,并且底座2211与定位凸台2212同轴设置,通常,底座2211与定位凸台2212之间相互一体连接。另外,底座2211与定位凸台2212均沿竖直方向设置,定位凸台2212的外径小于定位凸台2212的外径,并且定位凸台2212的外径尺寸与管料5的内径相一致,定位凸台2212用于供管料5套接,管料5在定位凸台2212的作用下实现定位,底座2211顶部与管料5的底部抵接,底座2211供管料5的底部进行摆放,底座2211对管料5进行承托。
底座2211的底部与第二线性气缸222的活塞杆的顶端固定连接,承载座221通过底座2211固定连接于第二线性气缸222的活塞杆上,将管料5套接于定位凸台2212上,当下压块213下压抵接至管料5顶部时,承载座221位于下压块213的正下方,通过启动第二线性气缸222,第二线性气缸222可驱动承载座221竖向移动,以使承载座221将管料5向上推送至下压组件21处,承载座221向上对管料5施加夹持力,同时将管料5推送到合适高度,提升了管料5在焊接时的位置精度。
参照图2,为实现对架体4进行定位,架体夹持部3包括驱动件31、第一夹块32以及第二夹块33,驱动件31设置于机架1上,第一夹块32以及第二夹块33固定安装于驱动件31上,第一夹块32以及第二夹块33相互正对,并且第一夹块32以及第二夹块33之间形成夹持间隙,夹持间隙的一侧开口与管料夹持部2相对,驱动件31用于驱动第一夹块32以及第二夹块33沿水平方向相互靠近或远离,将侧挡42放置于夹持间隙处,第一夹块32以及第二夹块33在驱动件31的作用下可将侧挡42夹持固定,此时侧挡42的一端可经由夹持间隙的一侧开口延伸至管料夹持部2处,如此实现侧挡42与管料5之间的相互对接。
具体的,驱动件31在本实施例中为气动手指,驱动件31固定安装于台板101的底部,台板101上设置有通孔,气动手指的夹指经由通孔沿竖直方向自下向上贯穿台板101,第一夹块32以及第二夹块33在本实施例中呈方块状设置,第一夹块32以及第二夹块33分别固定安装于气动手指的两个夹指上,通过启动气动手指,气动手指驱动第一夹块32以及第二夹块33沿水平方向相互靠近或远离,使第一夹块32与第二夹块33对侧挡42进行夹持及松脱。
进一步地,参照图2和图4,架体夹持部3位于下压块213的下方,更具体地说,第一夹块32以及第二夹块33位于下压块213的下方,托盘41的底部与第一夹块32的顶部相抵接,使得架体夹持部3的顶部与托盘41的底部相抵接,第一夹块32对托盘41进行承托,为提升架体4的稳定性,第一夹块32的顶部可设置有供托盘41容置的定位槽。另外,下压块213远离第一线性气缸211的活塞杆的一端固定连接有抵接块2131,抵接块2131位于下压块213靠近承载组件22的一侧,当下压块213下压并抵接至管料5时,抵接块2131与托盘41的顶部相抵接,此时抵接块2131与架体夹持部3对托盘41进行夹持,减少托盘41因焊接带来的振动,提升了架体4焊接时的稳定性,通常,抵接块2131可以通过焊接固定的方式与下压块213相固定。
本申请实施例一种电火花焊机焊接定位平台的实施原理为:均匀布置于机架1上的架体夹持部3与托盘41相抵接,使得托盘41在摆放时得到均匀承托,使得架体4不易产生上下偏移,同时,另外,相互正对的管料夹持部2以及架体夹持部3可将侧挡42与管料5相互正对,通过预先调整焊接位置,以得到侧挡42与管料5之间相对的位置关系,此时,分别得到定位的侧挡42以及管料5可在焊接机器手的作用下进行焊接固定,在焊接期间,侧挡42以及管料5不易产生晃动及相对偏移,提升了架体4以及管料5之间的焊接准度。
本实施例还公开了一种电火花焊机焊接定位平台焊接工艺,包括以下步骤:
S1:将焊接定位平台摆放至焊接机器手旁边;
S2:将架体4以及管料5装夹于焊接定位平台上;
S2-1:首先将管料5套接至定位凸台2212处,随即将托盘41摆放至若干个第一夹块32的顶部,并且将侧挡42嵌入夹持间隙内;
S2-2:启动气动手指以及启动第一线性气缸211,使得第一夹块32以及第二夹块33对侧挡42进行夹持,下压块213上的抵接块2131与架体4抵接,架体4的位置得到定位,;
S2-3:启动第二线性气缸222,承载座221将管料5上推,使得下压块213以及承载座221对管料5夹持固定,管料5实现定位;
S3:调试焊接机械手,使得焊接机械手的焊头移动至侧挡42与管料5之间的连接处,将焊头位置设定为焊点,记录焊点坐标位置并进行加工编程;
S4:通过编程程序启动机械手对多个焊点依次焊接固定,得到置物架层片;
S5:将置物架层片从焊接定位平台处取出,在此过程中,启动气动手指,使得第一夹块32以及第二夹块33相互远离,启动第一线性气缸211,使得下压块213上移复位,并且启动第二线性气缸222,承载座221从管料5内抽离,通过人工取出的方式将置物架层片进行取出;
S6:再次将料架以及管料装夹于焊接定位平台上,在焊接机械手的作用下将置物架层片焊接成型,随后将置物架层片从焊接平台上取出;
S7:重复步骤S6。
在焊接定位平台的定位下,提升焊接时,架体4以及管料5之间的焊接精度,减少二次加工的情况,提升了焊接加工的效率及精度。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。