一种纤维混凝土纤维拉拔试验原位加载装置及方法
文献发布时间:2023-06-19 09:44:49
技术领域
本发明属于无损检测技术领域,具体提供一种用于工业CT原位拉伸实验的加载装置及方法。
背景技术
混凝土是当代最主要的土木工程材料之一,它是一种脆性材料,具有较低的拉伸强度和断裂韧性。将混凝土中掺入乱向分布的短纤维能够有效地阻碍混凝土内部微裂缝的扩展及宏观裂缝的形成,改善混凝土的抗拉、抗弯、抗冲击及断裂韧性。近年来纤维混凝土被广泛用在建筑工程、水利工程、公路桥梁工程、公路路面和机场道面工程、铁路公程等各个专业领域当中。
纤维混凝土中纤维与基体间界面起着在纤维与基体之间传递应力的作用,其力学特性决定了纤维对混凝土基体的增强增韧作用,影响到纤维混凝土复合材料的整体力学性能,因此研究纤维与基体间界面力学特性尤为重要,通过实验测定复合材料界面的力学特性是常用的方法,其中拉拔试验相对简单、经济、易行,且在该试验条件下,纤维与基体的受力条件与复合材料开裂过程中桥联纤维与开裂基体的受力条件相近。国内外学者通过纤维拉拔试验对纤维与基体间界面力学特性做了大量研究,但大多是基于纤维拉拔的宏观力学特性,通过纤维拉拔曲线等条件分析界面力学特性。然而,纤维与基体界面的损伤破坏是一个复杂的三维空间问题,仅通过上述分析不能得到试件内部纤维基体界面处变形情况,不能实现纤维与基体间界面力学特性的定量表征。
发明内容
为了得到纤维在混凝土基体中受拉拔出整个过程中试件内部的变形情况,更直观正确的对纤维与混凝土间相互作用机理进行分析,实现纤维与基体间界面力学特性的定量表征,本发明提出了一种纤维混凝土中纤维拉拔试验原位加载装置及方法。
本发明的技术方案是:
纤维拉拔试验原位加载装置包括载物旋转平台、支撑底板、位移计、变送器、电动拉(压)杆、薄钢板、拉(压)力传感器、连接件、夹头、紧固转换件、钢柱、支撑顶板、X射线源、探测器、图像采集装置;
载物平台与电动拉(压)杆连接,电动拉(压)杆通过连接件与拉(压)力传感器连接,拉(压)力传感器通过连接件与夹头连接,夹头与紧固转换件连接,紧固转换件与纤维连接,薄钢板与电动拉(压)杆连接,位移计与薄钢板底部接触,支撑顶板、支撑底板与钢柱连接,变送器与数据采集装置连接,位移计与数据采集装置连接。
使用纤维混凝土纤维拉拔试验原位加载装置进行实验的方法:
A.将试件就位,启动数据采集系统以及由X射线源、探测器、图像采集装置构成的工业CT检测装置开始对试件进行分层扫描,直至获取到整个试件的CT图像后扫描结束;
B.启动电动拉(压)杆对纤维进行拉拔,拉(压)力传感器显示到预设数据后停止加载;
C.启动工业CT检测装置开始对试件进行分层扫描,直至获取到整个试件的CT图像后扫描结束;
D.重复步骤B、C,如此循环,直至纤维被拉出,停止加载并启动工业CT检测装置开始对试件进行扫描,直至获取到纤维被拉出后的试件CT图像后扫描结束。
本发明的有益效果:
本发明利用X射线工业CT检测技术结合原位拉拔试验加载实验,可得到纤维从混凝土基体中拔出或断裂过程中不同荷载条件下试件的CT图像,实现了纤维受拉拔时试件内部变形情况的三维检测,对研究纤维与基体的粘结机理提供比传统的实验方法更为有力的支持;与常规的单纤维拉拔试验装置相比,该装置不但可以进行单纤维拉拔实验,利用紧固转换件还可以实现多根纤维的拉拔实验。
下面结合附图和具体实施方式对本发明作进一步详细说明:
附图说明:
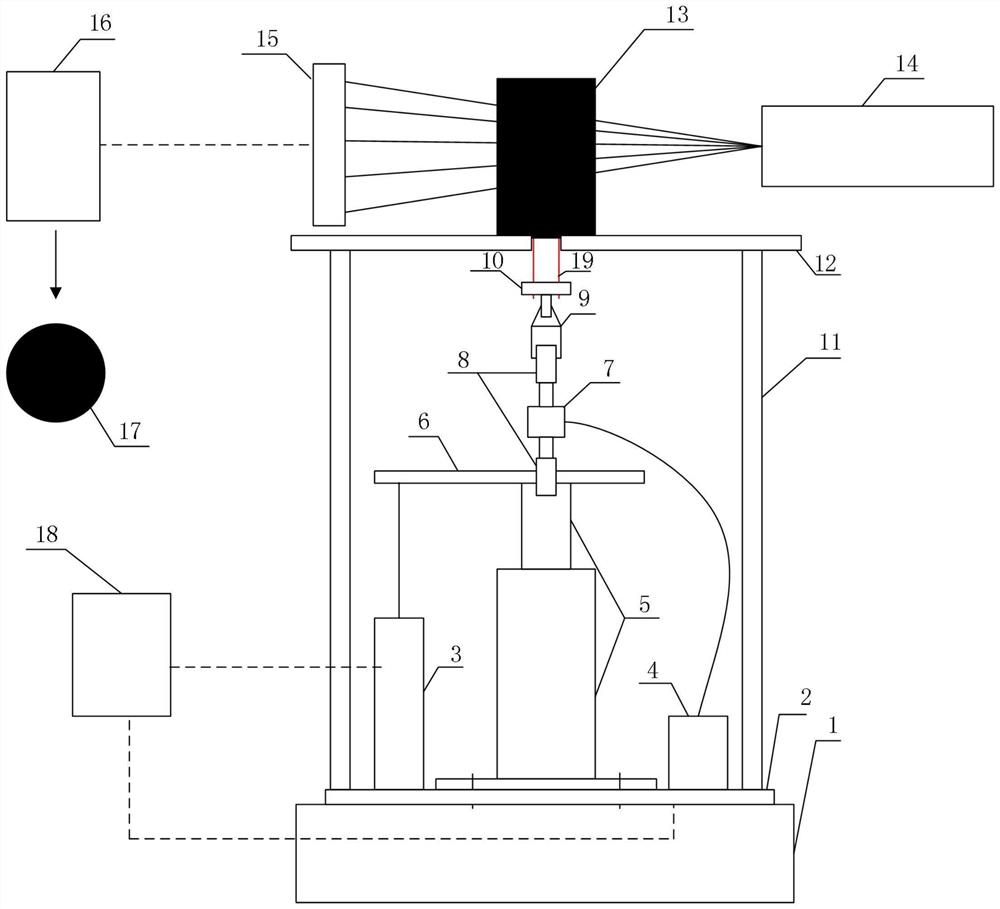
图1为纤维混凝土受力原位加载检测装置示意图。
图中:1、载物旋转平台,2、支撑底板,3、位移计,4、变送器,5、电动拉(压)杆,6、薄钢板,7、拉(压)力传感器,8、连接件,9、夹头,10、紧固转换件,11、钢柱,12、支撑顶板,13、混凝土基体,14、X射线源,15、探测器,16、图像采集装置,17、断面CT图像,18、数据采集装置,19、纤维
具体实施方式:
由图1可知纤维拉拔试验原位加载装置包括载物旋转平台(1)、支撑底板(2)、位移计(3)、变送器(4)、电动拉(压)杆(5)、薄钢板(6)、拉(压)力传感器(7)、连接件(8)、夹头(9)、紧固转换件(10)、钢柱(11)、支撑顶板(12)、X射线源(14)、探测器(15)、图像采集装置(16)、数据采集装置(18);
载物平台与电动拉(压)杆连接,电动拉(压)杆通过连接件与拉(压)力传感器连接,拉(压)力传感器通过连接件与夹头连接,夹头与紧固转换件连接,紧固转换件与纤维连接,薄钢板与电动拉(压)杆连接,位移计与薄钢板底部接触,支撑顶板、支撑底板与钢柱连接,变送器与数据采集装置连接,位移计与数据采集装置连接。
使用纤维混凝土受力原位加载实验装置进行实验的方法:
A.将试件就位,启动数据采集系统(18)以及由(14)X射线源、(15)探测器、(16)图像采集装置构成的工业CT检测装置开始对试件(13)混凝土基体和(19)纤维进行分层扫描,直至获取到整个试件的CT图像后扫描结束;
B.启动(5)电动拉(压)杆对纤维进行拉拔,拉(压)力传感器(7)显示到预设数据后停止加载;
C.启动由(14)X射线源、(15)探测器、(16)图像采集装置构成的工业CT检测装置开始对试件进行分层扫描,直至获取到整个试件的CT图像后扫描结束;
D.重复步骤B、C,如此循环,直至纤维被拉出,停止加载并启动由(14)X射线源、(15)探测器、(16)图像采集装置构成的工业CT检测装置开始对试件进行扫描,直至获取到纤维被拉出后的试件CT图像后扫描结束。
需要指出的是,以上所述实施实例用于进一步说明本发明,实施实例不应被视为限制本发明的范围。
- 一种纤维混凝土纤维拉拔试验原位加载装置及方法
- 玄武岩纤维混凝土性能测试加载装置