轨道式重型设备智能输送装置
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及一种轨道式重型设备智能输送装置。
背景技术
目前在对一些重型的轨道交通设备,比如火车车厢,其长度在8-25米,重量多达30多吨。在喷涂油漆时,将轨道交通设备放置于路轨上,之后用电机推动轨道交通设备在路轨上移动,路轨的前方为倾斜向上的路轨,当推动轨道交通设备快要到位时,电机停止动力输出,利用轨道交通设备惯性往前走并往倾斜向上的路轨走,进行爬坡,利用轨道交通设备重心的抬升来抵消自身的惯性,这样轨道交通设备就没办法实现精准定位。所以很多自动化的工艺均没有办法很好地实现。
由于这些设备过于笨重,在驱动时,惯性太大,不能实现精准定位。本案就是在此种情况下作出的。
发明内容
针对现有技术的不足,本发明的目的在于提供一种轨道式重型设备智能输送装置。
本发明所采用的技术方案为:
一种轨道式重型设备智能输送装置,其特征在于:包括两平行设置的路轨1和多个链轮驱动传输机构单元2,各个链轮驱动传输机构单元2均匀排布在路轨1中间并且路轨1并行;在相邻各个链轮驱动传输机构单元2过渡处均设有辅助过渡推车机构3;
所述链轮驱动传输机构单元2包括链轮21和链条22,链条22安装在链轮21上,所述链轮21连接有电机驱动组件23,在链条22上设有可实现轨道式重型设备的自动导入及分离装置24。
更优的,自动导入及分离装置24包括连接固定在链条22上的锁钩座241,锁钩座241由与链条连接固定的底部2411和分别从底座两端延伸出来的首部2412和尾部2413,所述底部2411、首部2412和尾部2413一体成型且呈U形状,在尾部2413铰接有推头242,在底部2411上连接有弹性件243,弹性件243上端顶压住推头242的内底面使推头242保持形态,所述推头242端部与锁钩座241的首部2412之间形成有一间隔空间244,所述推头242呈V形状并在弹性件243的作用下,使推头242朝向首部2412的一端形成一斜坡向上的角度。
更优的,所述推头242包括有铰接在尾部2413的铰接部2421,铰接部2421两端延伸有导入部2422和锁紧部2423,铰接部2421通过一销轴铰接在锁钩座241的尾部2413;导入部2422为一平直面;锁紧部2423为一平直的倾斜坡面;导入部2422、铰接部2421和锁紧部2423形成为V形状。
更优的,所述弹性件243为压缩弹簧。
更优的,在所述锁钩座241底部设有凹形槽,在凹形槽两侧设置多个通孔2415,凹形槽卡入链条22的链条板中并通过销钉穿过通孔2415后固定连接。
更优的,所述辅助过渡推车机构3包括首尾两端的驱动链轮31和带动驱动链轮31动作的驱动电机组32,在两个驱动链轮31之间连接有驱动链条33,在驱动链条33上连接固定有可驱动轨道式重型设备运动的驱动块34,驱动块34包括有与驱动链条33固定连接的连接部341以及驱动轨道式重型设备保持运动形态的驱动部342。
更优的,所述驱动部342呈梯形状,驱动部342的左侧为垂直面A,顶部为平面B,右侧为下斜面C。
更优的,所述设在驱动链条33上的驱动块34的个数为一个。
更优的,所述设在链条22上的锁钩座241的个数为一个。
更优的,所述辅助过渡推车机构3还包括有可检测轨道式重型设备位置的检测光电探头。
本发明的有益效果在于:
1、本案采用两平行设置的路轨,在路轨中间依次排列有多个链轮驱动传输机构单元,在相邻各个链轮驱动传输机构单元过渡处均设有辅助过渡推车机构。这样轨道式重型设备放置于路轨上,依靠链轮驱动传输机构单元来驱动轨道式重型设备匀速移动,由于路轨很长,故需要多个链轮驱动传输机构单元才能完成,由于各个链轮驱动传输机构单元之间需要过渡,在轨道式重型设备脱离上一个链轮驱动传输机构单元后,会失去动力,所以此时需要其它附加的动力来维持轨道式重型设备的运动,故此时辅助过渡推车机构来实现此种功能,为轨道式重型设备提供额外的动力,来维持其运动状态。
2、为了实现轨道式重型设备动力的切入来脱离,本案采用锁钩座,锁钩座连接固定在链条上,链条和链轮置于两侧路轨的中间,重型路轨设备置于路轨上,在重型路轨设备底部焊接有垂直向下的柱子10,链轮驱动链条移动,链条带动锁钩座一起移动,当锁钩座来到柱子10时,柱子10的底端刚好与导入部平齐,锁钩座继续前进,柱子10的底端来到锁紧部的表面,由于锁紧部的表面在弹性件顶住的作用下,锁紧部的表面为一倾斜向上的坡,柱子10的底端会顶压着锁紧部表面,使锁紧部绕着其铰接点转动,柱子10的底端会继续在锁紧部表面滑动,最终滑过锁紧部,柱子10的底端脱离锁紧部,锁紧部在弹性件的作用下弹起回复原位,柱子10的下端就会落入推头端部与锁钩座首部之间形成的间隔空间内,并且柱子10与锁钩座的首部接触并由首部驱动柱子10,从而带动重型路轨设备在路轨上移动。当需要重型路轨设备停止时,链轮停止即可使得链条停止移动,锁钩座也停止移动,卡在间隔空间的柱子10也会停止移动,使得重型路轨设备停止移动,实现停止,实现精确定位,为实现自动喷漆打下基础。
3、当需要脱离带动重型路轨设备时,链条带着锁钩座来到链轮处,锁钩座沿着链轮作周向转运,则锁钩座上的锁紧部角度发生变化,并且间隔空间由处理链条的水平最高点慢慢下落,当锁紧部的角度到达设定角度时,这样柱子10就会脱离柱子10,实现自动分离。
4、此外,为了实现轨道式重型设备脱离上一个链轮驱动传输机构单元后,辅助过渡推车机构需要同时介入,此时需要检测光电探头来探测轨道式重型设备的位置,当检测到轨道式重型设备脱离上一个链轮驱动传输机构单元后,辅助过渡推车机构会同时启动,驱动链条同时带动驱动块移动,同时驱动块也会与轨道式重型设备的另一过渡柱子1011接触,实现动力的传送,也实现了为轨道式重型设备提供无间断提供的动力。
5、为了辅助过渡推车机构动力的脱离,特意将驱动部设计成呈梯形状,驱动部的左侧为垂直面A,顶部为平面B,右侧为下斜面C。链条带着驱动块来到驱动链轮处,驱动块沿着驱动链轮作周向转运,则驱动块在驱动链轮上的角度发生变化,过渡柱子1011会滑过顶部之后,最后滑过右侧的下斜面C,这样过渡柱子1011就会脱离,动力传送就此结束。
附图说明
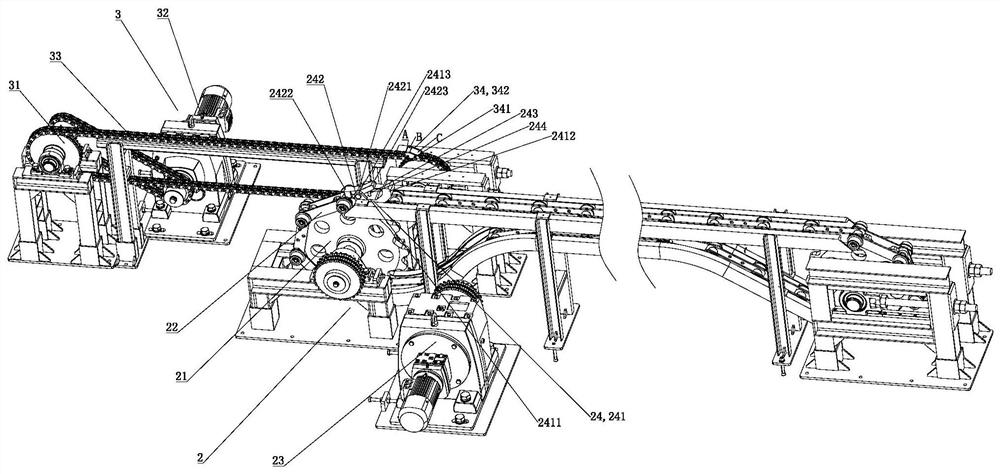
图1为链轮驱动传输机构单元和辅助过渡推车机构的立体图。
图2为轨道式重型设备智能输送装置的立体图。
图3-4为链轮驱动传输机构单元的侧视图和俯视图。
图5-6为辅助过渡推车机构的侧视图和俯视图。
图7为重型设备置于轨道式重型设备智能输送装置的正视图。
图8为自动导入及分离装置的脱离动力示意图。
图9为辅助过渡推车机构的脱离动力示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图所示,为本发明较佳实施例的一种轨道式重型设备智能输送装置。在本实施例中,重型路轨设备为火车车厢9,长度在8-25米,重达30几吨。本实施例中,先建造一条路轨,也就是铁轨,长度大概260米。火车车厢放置在路轨上,之后在火车车厢底部中间位置焊接一个柱子10,为配合实施作准备。
如图1、2所示,本案包括两平行设置的路轨1和多个链轮驱动传输机构单元2,各个链轮驱动传输机构单元2均匀排布在路轨1中间并且路轨1并行。在相邻各个链轮驱动传输机构单元2过渡处均设有辅助过渡推车机构3。这样轨道式重型设备放置于路轨上,依靠链轮驱动传输机构单元来驱动轨道式重型设备匀速移动,由于路轨很长,故需要多个链轮驱动传输机构单元才能完成,由于各个链轮驱动传输机构单元之间需要过渡,在轨道式重型设备脱离上一个链轮驱动传输机构单元后,会失去动力,所以此时需要其它附加的动力来维持轨道式重型设备的运动,故此时辅助过渡推车机构来实现此种功能,为轨道式重型设备提供额外的动力,来维持其运动状态。
进一步描述,所述链轮驱动传输机构单元2包括链轮21和链条22,链条22安装在链轮21上,所述链轮21连接有电机驱动组件23,在链条22上设有可实现轨道式重型设备的自动导入及分离装置24。
如图1、2、3、4、8所示,所述自动导入及分离装置24包括连接固定在链条22上的锁钩座241,在所述锁钩座241底部设有凹形槽,在凹形槽两侧设置多个通孔2415,凹形槽卡入链条22的链条板中并通过销钉穿过通孔2415后固定连接。锁钩座241由与链条连接固定的底部2411和分别从底座两端延伸出来的首部2412和尾部2413,所述底部2411、首部2412和尾部2413一体成型且呈U形状,即是中间凹下,两端向上翘起。在尾部2413铰接有推头242,在底部2411上连接有弹性件243,在本实施例中,所述弹性件为压缩弹簧。弹性件243上端顶压住推头242的内底面使推头242保持形态,所述推头242端部与锁钩座241的首部2412之间形成有一间隔空间244,所述推头242呈V形状并在弹性件243的作用下,使推头242朝向首部2412的一端形成一斜坡向上的角度。
此外,所述推头242包括有铰接在尾部2413的铰接部2421,铰接部2421两端延伸有导入部2422和锁紧部2423,铰接部2421通过一销轴铰接在锁钩座241的尾部2413。导入部2422为一平直面。锁紧部2423为一平直的倾斜坡面。导入部2422、铰接部2421和锁紧部2423形成为V形状。
此外,所述锁钩座为铸铁铸造而成,其为一体成型,其强度足够大,其最薄的处,都有150-250mm的厚度,比较佳的厚度为150-200mm厚度。使之能推动多达30多吨的车箱。更优的,锁钩座2可采用更高强度的合金钢制成。本案的低合金高强度钢是指屈服强度超过275MPa的合金钢。
还有,如图1、2、5、6、9所示,所述辅助过渡推车机构3包括首尾两端的驱动链轮31和带动驱动链轮31动作的驱动电机组32,驱动电机组32包括有电机和减速器,通过减速器与驱动链轮31连接,两者之间也是通过链条连接,为实现其强度,采用双组链条连接。在两个驱动链轮31之间连接有驱动链条33,驱动链条33采用加厚加粗的方式来达到要求。在驱动链条33上连接固定有可驱动轨道式重型设备运动的驱动块34,驱动块34包括有与驱动链条33固定连接的连接部341以及驱动轨道式重型设备保持运动形态的驱动部342。
为实现自动切入动力和自动脱离动力,本案的驱动部342呈梯形状,驱动部342的左侧为垂直面A,顶部为平面B,右侧为下斜面C。为实现精准动力切入,辅助过渡推车机构3还包括可检测轨道式重型设备位置的检测光电探头。在本案中,轨道式重型设备为火车车厢。
当然,由于本案的路轨为平直的铁轨,在铁轨的首尾两端还是需要利用其它现有的运输设备来转移火车车厢,在此不再论述。
1、如图1、2、8所示,当需要将驱动火车车厢移动时,动力需要导入,链轮驱动链条移动,链条带动锁钩座一起移动,当锁钩座来到火车车厢一起底部的柱子10时,柱子10的底端刚好与导入部平齐,锁钩座继续前进,柱子10的底端来到锁紧部的表面,由于锁紧部的表面在弹性件顶住的作用下,锁紧部的表面为一倾斜向上的坡,柱子10的底端会顶压着锁紧部表面,使锁紧部绕着其铰接点转动,柱子10的底端会继续在锁紧部表面滑动,最终滑过锁紧部,柱子10的底端脱离锁紧部,锁紧部在弹性件的作用下弹起回复原位,柱子10的下端就会落入推头端部与锁钩座首部之间形成的间隔空间内,并且柱子10与锁钩座的首部接触并由首部驱动柱子10,从而带动重型路轨设备在路轨上移动。当需要重型路轨设备停止时,链轮停止即可使得链条停止移动,锁钩座也停止移动,卡在间隔空间的柱子10也会停止移动,使得重型路轨设备停止移动,实现停止,实现精确定位,为实现自动喷漆打下基础。
2、如图1、2、8所示,当需要脱离带动火车车厢时,链条带着锁钩座来到链轮处,锁钩座沿着链轮作周向转运,则锁钩座上的锁紧部角度发生变化,并且间隔空间由处理链条的水平最高点慢慢下落,当锁紧部的角度到达设定角度时,这样柱子10就会脱离柱子10,实现自动分离。图8中显示几个锁钩座,显示的锁钩座在不同的位置时,其柱子10的与其相对的位置。当需要脱离带动重型路轨设备时,链条带着锁钩座来到链轮处,锁钩座沿着链轮作周向转运,则锁钩座上的锁紧部角度发生变化,并且间隔空间由处理链条的水平最高点慢慢下落,当锁紧部的角度到达设定角度时,这样柱子就会脱离柱子,实现自动分离。
3、如图1、2、9所示,火车车厢脱离上一个链轮驱动传输机构单元后,在摩擦力的作用下,火车车厢就会慢下来,本案为是实现保持火车车厢的运动速度。辅助过渡推车机构的动力需要同时介入,此时需要检测光电探头来探测轨道式重型设备的位置,当检测到轨道式重型设备脱离上一个链轮驱动传输机构单元后,辅助过渡推车机构会同时启动,驱动链条同时带动驱动块移动,同时驱动块也会与轨道式重型设备的另一过渡柱子1011接触,实现动力的传送,也实现了为轨道式重型设备提供无间断提供的动力。
4、如图1、2、9所示,为了辅助过渡推车机构动力的脱离,特意将驱动部设计成呈梯形状,驱动部的左侧为垂直面A,顶部为平面B,右侧为下斜面C。链条带着驱动块来到驱动链轮处,驱动块沿着驱动链轮作周向转运,则驱动块在驱动链轮上的角度发生变化,过渡柱子1011会滑过顶部之后,最后滑过右侧的下斜面C,这样过渡柱子1011就会脱离,动力传送就此结束。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 轨道式重型设备智能输送装置
- 一种重型轨道式石油专用管输送车车身姿态智能矫正方法