一种用于服务器生产的自动缓存机
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及服务器生产的技术领域,特别是涉及一种用于服务器生产的自动缓存机。
背景技术
服务器在生产过程中,需要先利用一拆卸设备对机箱进行拆卸,并将拆卸的机箱置于一栈板上,接着输送至柔性栈板线,在柔性栈板线上依次经过多个安装工位,由工人将各个配件依次安装在机箱内,直至完成成套服务器的组装工作。
通过观察发现,拆卸设备对机箱的拆箱作业简单、速度快,成套服务器的组装工作速度慢,因此,还需至少安排两个工人对已拆卸的机箱进行搬运、临时堆放以及二次搬运至柔性栈板线,显而易见的,人工搬运的方式提高了服务器生产的人工成本,并且,人工搬运的速度慢,也降低了服务器的生产效率。
有鉴于此,本发明人针对上述服务器生产过程中未臻完善所导致的诸多缺失及不便,而深入构思,且积极研究改良试做而开发设计出本发明。
发明内容
本发明的目的在于提供一种用于服务器生产的自动缓存机,用于降低服务器生产的人工成本,以及提高服务器的生产效率。
为了达成上述目的,本发明的解决方案是:
一种用于服务器生产的自动缓存机,所述自动缓存机包括机体框体;堆栈托架,所述堆栈托架安装在机体框体内;以及两个托板机械手:进料托板机械手和出料托板机械手,所述进料托板机械手和出料托板机械手均安装在机体框体上,并分别位于堆栈托架的两侧。
所述托板机械手包括横向移动机组,所述横向移动机组安装在机体框体上;竖向移动机组,所述竖向移动机组安装在横向移动机组上;纵向移动机组,所述纵向移动机组安装在竖向移动机组上;以及托板悬臂,所述托板悬臂安装在纵向移动机组上。
所述纵向移动机组包括安装座,所述安装座安装在竖向移动机组上;导轨组件,所述导轨组件安装在安装座上,所述托板悬臂活动配合在导轨组件上;第一传动齿条,所述第一传动齿条安装在托板悬臂的底部;第一伺服电机,所述第一伺服电机安装在导轨组件上;以及传动齿轮组,所述传动齿轮组转动安装在导轨组件上,所述传动齿轮组与第一伺服电机传动连接,并与第一传动齿条啮合。
所述纵向移动机组还包括第一导轮组,所述托板悬臂上设有第一导轮槽;所述第一导轮组转动安装在导轨组件上,所述托板悬臂通过第一导轮槽活动套接在第一导轮组上。
所述托板悬臂包括内层悬臂,所述内层悬臂活动配合在导轨组件上,所述第一传动齿条安装在内层悬臂的底部;外层悬臂;以及两组连动组件,所述外层悬臂通过两组连动组件活动配合在内层悬臂上,使得内层悬臂移动时带动外层悬臂移动。
两组连动组件均包括固定端子,所述固定端子安装在导轨组件上;连动齿轮,所述连动齿轮转动安装在内层悬臂的一端;连动端子,所述连动端子固定在外层悬臂的一端;以及连动链条,所述连动链条的一端连接至固定端子上,另一端绕过连动齿轮后连接至连动端子上;其中,所述连动齿轮和连动端子分别位于托板悬臂的两端,并且两组连动组件的安装方向相反。
所述横向移动机组包括横向导轨,所述横向导轨安装在机体框体上;第二传动齿条,所述第二传动齿条安装在横向导轨上;横向滑块,所述横向滑块活动配合在横向导轨上;第二伺服电机,所述第二伺服电机安装在横向滑块上,所述第二伺服电机的输出端与第二传动齿条传动连接;所述竖向移动机组包括竖向导轨,所述竖向导轨安装在横向滑块上;第三传动齿条,所述第三传动齿条安装在竖向导轨上;竖向滑块,所述竖向滑块活动配合在竖向导轨上;第三伺服电机,所述第三伺服电机安装在竖向滑块上,所述第三伺服电机的输出端与第三传动齿条传动连接。
所述托板机械手还包括控制系统,所述控制系统包括PLC控制器,所述PLC控制器分别与第一伺服电机、第二伺服电机以及第三伺服电机电性连接,用以控制第一伺服电机、第二伺服电机以及第三伺服电机;两个对射传感器,两个对射传感器分别安装在横向导轨的两端,并均与PLC控制器电性连接;以及两个遮光片,两个遮光片分别安装在横向滑块的两端,并且分别活动穿过两个对射传感器。
所述堆栈托架包括竖支撑杆组,所述竖支撑杆组安装在机体框体上;所述竖支撑杆组上等间距的安装有至少两层横支撑杆组;每层横支撑杆组上等间距的安装有至少两个组缓存架杆。
所述缓存架杆包括两根缓存杆,两根缓存杆的宽度小于托板悬臂的宽度,两根缓存杆的高度大于托板悬臂的高度。
采用上述方案后,本发明通过设有堆栈托架以及两个托板机械手,进料托板机械手能够自动将放置有拆卸机箱的栈板拿取、移放至堆栈托架上进行缓存,出料托板机械手能够自动将缓存的栈板拿取、移放至柔性栈板线上,以配合成套服务器的组装,从而替代人工进行搬运、临时堆放以及二次搬运至柔性栈板线,进而降低服务器生产的人工成本,以及提高服务器的生产效率。
附图说明
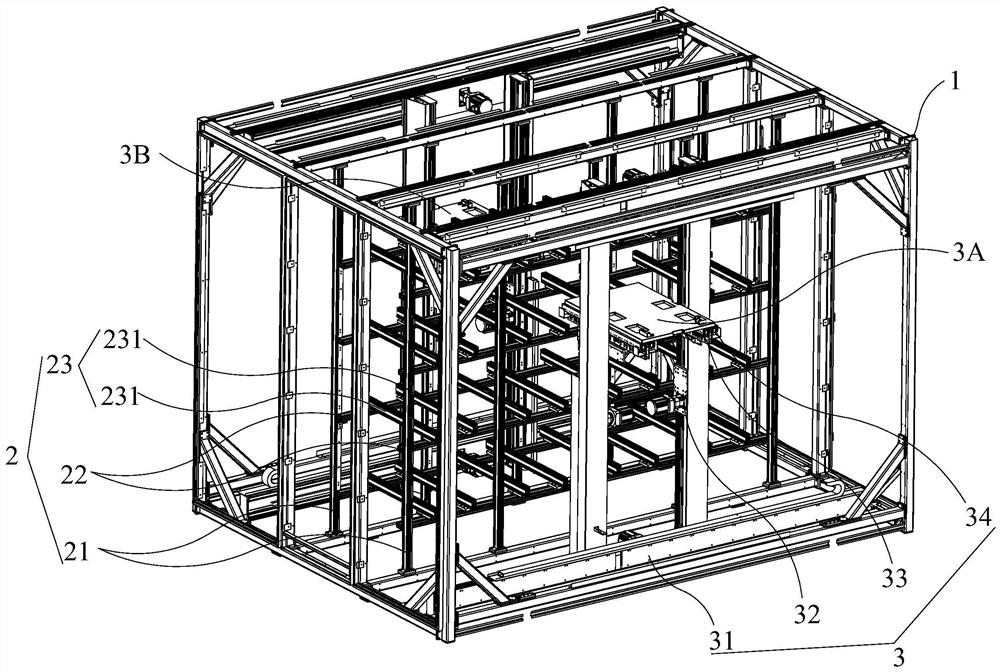
图1为本发明较佳实施例的结构示意图;
图2为本发明较佳实施例拆除防尘板后的结构示意图;
图3为本发明较佳实施例中托板机械手的结构示意图;
图4为本发明较佳实施例中纵向移动机组的结构示意图;
图5为本发明较佳实施例中纵向移动机组的分解图;
图6为本发明较佳实施例中横向移动机组的局部结构示意图。
具体实施方式
为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
如图1至图6所示,为本发明一种用于服务器生产的自动缓存机的较佳实施例,该自动缓存机包括机体框体1;堆栈托架2,堆栈托架2安装在机体框体1内;以及两个托板机械手3:进料托板机械手3A和出料托板机械手3B,进料托板机械手3A和出料托板机械手3B均安装在机体框体1上,并分别位于堆栈托架2的两侧。
使用时,将本发明的自动缓存机置于拆卸设备和柔性栈板线之间,其中进料托板机械手3A朝向拆卸设备,出料托板机械手3B朝向柔性栈板线;服务器的机箱被拆卸完成后置于一栈板上,该栈板由拆卸设备输送至一取料位置;之后,进料托板机械手3A伸出至取料位置并拿取栈板,之后,进料托板机械手3A移动至堆栈托架2内,将栈板放置在堆栈托架2上,堆栈托架2上可供放置多块栈板,在服务器的组装较慢时,对已拆卸的机箱进行缓存;对于缓存在堆栈托架2上的栈板,出料托板机械手3B可根据柔性栈板线的组装速度,将栈板从堆栈托架2上拿取至柔性栈板线上,拿取时,出料托板机械手3B伸入堆栈托架2内并拿取栈板,之后,出料托板机械手3B移动至柔性栈板线上,将栈板放置在柔性栈板线的一进料工位上,由柔性栈板线输送至各个安装工位,用于完成成套服务器的组装工作。
本发明的重点在于,本发明通过设有堆栈托架2以及两个托板机械手3,进料托板机械手3A能够自动将放置有拆卸机箱的栈板拿取、移放至堆栈托架2上进行缓存,出料托板机械手3B能够自动将缓存的栈板拿取、移放至柔性栈板线上,以配合成套服务器的组装,从而替代人工进行搬运、临时堆放以及二次搬运至柔性栈板线,进而降低服务器生产的人工成本,以及提高服务器的生产效率。
上述托板机械手3包括横向移动机组31,横向移动机组31安装在机体框体1上;竖向移动机组32,竖向移动机组32安装在横向移动机组31上;纵向移动机组33,纵向移动机组33安装在竖向移动机组32上;以及托板悬臂34,托板悬臂34安装在纵向移动机组33上。
使用时,通过横向移动机组31、竖向移动机组32和纵向移动机组33在X、Y、Z轴三个方向上移动托板悬臂34,使得进料托板机械手3A上的托板悬臂34能够活动往返于拆卸设备的取料位置和堆栈托架2,出料托板机械手3B上的托板悬臂34能够活动往返于堆栈托架2和柔性栈板线。
上述纵向移动机组33包括安装座331,安装座331安装在竖向移动机组32上;导轨组件332,导轨组件332安装在安装座331上,托板悬臂34活动配合在导轨组件332上;第一传动齿条333,第一传动齿条333安装在托板悬臂34的底部;第一伺服电机334,第一伺服电机334安装在导轨组件332上;以及传动齿轮组335,传动齿轮组335转动安装在导轨组件332上,传动齿轮组335与第一伺服电机334传动连接,并与第一传动齿条333啮合。
以进料托板机械手3A为例,纵向移动机组33在使用时,第一伺服电机334驱动传动齿轮组335转动,传动齿轮组335通过第一传动齿条333带动托板悬臂34在导轨组件332上移动。第一伺服电机334驱动方向不同,也决定了托板悬臂34移动方向不同,即可以将托板悬臂34朝向拆卸设备的取料位置移动以拿取栈板,也可以将托板悬臂34朝向堆栈托架2移动以将栈板放置在堆栈托架2上。而出料托板机械手3B的工作原理与进料托板机械手3A的工作原理相同,在此不再赘述。
上述纵向移动机组33还包括第一导轮组336,托板悬臂34上设有第一导轮槽341;第一导轮组336转动安装在导轨组件332上,托板悬臂34通过第一导轮槽341活动套接在第一导轮组336上。
本发明的托板悬臂34通过第一导轮槽341活动套接在第一导轮组336上,能够减小托板悬臂34和导轨组件332之间摩擦力,使得托板悬臂34的移动更加顺畅;并且,导轨组件332能够通过第一导轮组336对托板悬臂34起到支撑的作用,使得外伸的托板悬臂34结构更加牢固、稳定。
上述托板悬臂34包括内层悬臂342,内层悬臂342活动配合在导轨组件332上,第一传动齿条333安装在内层悬臂342的底部;外层悬臂343;以及两组连动组件344,外层悬臂343通过两组连动组件344活动配合在内层悬臂342上,使得内层悬臂342移动时带动外层悬臂343移动。
使用时,在第一伺服电机334的驱动下,传动齿轮组335能够带动内层悬臂342在导轨组件332上移动伸出;内层悬臂342移动过程中,又能够通过两组连动组件344带动外层悬臂343在内层悬臂342上移动伸出,从而形成二次伸出,加长了托板悬臂34外伸的长度,从而使得托板悬臂34能够托住栈板底部较大的面积,对栈板形成稳定的支撑。
两组连动组件344均包括固定端子3441,固定端子3441安装在导轨组件332上;连动齿轮3442,连动齿轮3442转动安装在内层悬臂342的一端;连动端子3443,连动端子3443固定在外层悬臂343的一端;以及连动链条3444,连动链条3444的一端连接至固定端子3441上,另一端绕过连动齿轮3442后连接至连动端子3443上;其中,连动齿轮3442和连动端子3443分别位于托板悬臂34的两端,并且两组连动组件344的安装方向相反。
当内层悬臂342朝向拆卸设备伸出时,内层悬臂342带动一组连动组件344中的连动齿轮3442朝向拆卸设备移动,连动齿轮3442移动过程中带动该组连动组件344中的连动链条3444朝向拆卸设备移动,连动链条3444通过该组连动组件344中的连动端子3443拉动外层悬臂343朝向拆卸设备移动,进而形成朝向拆卸设备的二次伸出。反之,当内层悬臂342朝向堆栈托架2伸出时,内层悬臂342带动另一组连动组件344中的连动齿轮3442朝向堆栈托架2移动,连动齿轮3442移动过程中带动该组连动组件344中的连动链条3444朝向堆栈托架2移动,连动链条3444通过该组连动组件344中的连动端子3443拉动外层悬臂343朝向堆栈托架2移动,进而形成朝向堆栈托架2的二次伸出。
上述托板悬臂34还包括第二导轮组345,内层悬臂342上设有第二导轮槽3421;第二导轮组345转动安装在外层悬臂343上,外层悬臂343通过第二导轮组345活动安装在第二导轮槽3421内。
本发明的外层悬臂343通过第二导轮组345活动安装在第二导轮槽3421内,能够减小外层悬臂343和内层悬臂342之间摩擦力,使得外层悬臂343的移动更加顺畅;并且,内层悬臂342能够通过第二导轮槽3421对外层悬臂343起到支撑的作用,使得外伸的外层悬臂343结构更加牢固、稳定。
上述横向移动机组31包括横向导轨311,横向导轨311安装在机体框体1上;第二传动齿条312,第二传动齿条312安装在横向导轨311上;横向滑块313,横向滑块313活动配合在横向导轨311上;第二伺服电机314,第二伺服电机314安装在横向滑块313上,第二伺服电机314的输出端与第二传动齿条312传动连接。
上述竖向移动机组32包括竖向导轨321,竖向导轨321安装在横向滑块313上;第三传动齿条322,第三传动齿条322安装在竖向导轨321上;竖向滑块323,竖向滑块323活动配合在竖向导轨321上;第三伺服电机324,第三伺服电机324安装在竖向滑块323上,第三伺服电机324的输出端与第三传动齿条322传动连接。
使用时,在第二伺服电机314的驱动下,第二伺服电机314通过第二传动齿条312带动横向滑块313在横向滑轨上移动,从而实现通过横向移动机组31在X轴上移动托板悬臂34;而在第三伺服电机324的驱动下,第三伺服电机324通过第三传动齿条322带动竖向滑块323在竖向滑轨上移动,从而实现通过竖向移动机组32在Y轴上移动托板悬臂34。
上述堆栈托架2包括竖支撑杆组21,竖支撑杆组21安装在机体框体1上;竖支撑杆组21上等间距的安装有至少两层横支撑杆组22;每层横支撑杆组22上等间距的安装有至少两个组缓存架杆23。
上述缓存架杆23包括两根缓存杆231,两根缓存杆231的宽度小于托板悬臂34的宽度,两根缓存杆231的高度大于托板悬臂34的高度。
在本实施例中,上述竖支撑杆组21上等间距的安装有四层横支撑杆组22;每层横支撑杆组22上等间距的安装有四个组缓存架杆23,从而使得堆栈托架2能够提供16个缓存栈板的位置。
使用时,通过横向移动机组31、竖向移动机组32和纵向移动机组33在X、Y、Z轴三个方向上移动托板悬臂34,使得托板悬臂34能够移动到与各个缓存架杆23相对应的位置。因为,两根缓存杆231的宽度小于托板悬臂34的宽度,两根缓存杆231的高度大于托板悬臂34的高度;所以,放置有栈板的托板悬臂34可以先移动到缓存架杆23的上方,之后,朝向两根缓存杆231之间的空隙向下移动,直至将栈板放置在缓存架杆23上,之后,再从两根缓存杆231之间的空隙退出,以准备下一块栈板的缓存。而需要将栈板移放至柔性栈板线上时,空置的托板悬臂34可以先移动、伸入到两根缓存杆231之间的空隙内,之后,再向上移动、抬起置于缓存架杆23上的栈板,之后,再将栈板移放至柔性栈板线上。
上述托板机械手3还包括控制系统35,控制系统35与横向移动机组31、竖向移动机组32以及纵向移动机组33均电性连接,用以控制横向移动机组31、竖向移动机组32以及纵向移动机组33。该控制系统35包括PLC控制器351(PLC控制器351的全称为可编程逻辑控制器,英文全称为:Programmable Logi c Control ler,),PLC控制器351分别与第一伺服电机334、第二伺服电机314以及第三伺服电机324电性连接,用以控制第一伺服电机334、第二伺服电机314以及第三伺服电机324。
通过设有PLC控制器351,用以控制第一伺服电机334、第二伺服电机314以及第三伺服电机324,进而控制横向移动机组31、竖向移动机组32以及纵向移动机组33对托板悬臂34的移动轨迹,以配合栈板的精准移放,从而实现自动化生产,进一步的提高生产效率。
上述控制系统35还包括两个对射传感器352,两个对射传感器352分别安装在横向导轨311的两端,并均与PLC控制器351电性连接;以及两个遮光片353,两个遮光片353分别安装在横向滑块313的两端,并且分别活动穿过两个对射传感器352。
当横向移动机组31向两端过度移动时,横向滑块313上的遮光片353就会扫过对射传感器352,进而触发对射传感器352,并将触发信号传递给PLC控制器351,由PLC控制器351控制第二伺服电机314停机,从而避免横向移动机组31向两端过度移动造成损坏。
上述机体框体1的外周安装有防尘板11,防尘板11上设有供托板悬臂34进出的通孔111。通过设有防尘板11,能够有效避免缓存在自动缓存机内的服务器积尘。
上述对本发明的具体示例性实施方案的描述是为了说明和例证的目的,这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得所属领域的普通技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
- 一种用于服务器生产的自动缓存机
- 一种用于自动装卸车生产线的缓存机