用于在双车轴的机动车中对两个布置在一个车轴上的电动马达进行校准的装置
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及一种用于在双车轴的机动车中对两个布置在一个车轴上的电动马达进行校准的装置,所述机动车尤其是电动车辆或混合动力车辆。
背景技术
单个车轮驱动器越来越在带有至少一个被电驱动的车轴的车辆中使用。单个车轮驱动器的优点尤其是用于实现驱动力矩的各轮单独分配的可能性。省却了差速器意味着,转矩可以根据车辆的期望的纵向和横向加速度而相同地或有针对性不同地分配到带有电动的单个车轮驱动器的车轴的两个车轮上。
该柔性也意味着对两个完全或部分独立的电动驱动器或驱动马达的所输出的转矩的精度的高要求。转矩与相应的设定值的过高的偏差可影响行驶动力学。驾驶员必须通过明显的反向转向在直线行驶中进行平衡。从一定的阈值开始,车辆的行驶行为不再可接受。
发明内容
本发明的任务在于,提供简单的校准以用于补偿在转矩方面的差异。
根据本发明,所述任务通过独立权利要求的特征来解决,而在从属权利要求中给出本发明的优选的扩展方案。
在根据本发明的用于在双车轴的机动车中对两个布置在一个车轴上的电动马达进行校准的装置(其包括至少一个电子的控制单元)中,在车辆运动期间实施以下步骤。在第一步骤中,检查:是否满足了针对从力矩调节切换到转速调节的预定的条件,并且如果是这种情况,则在预定的时间段上切换到转速调节中。在预定的时间段期间,在第二步骤中(该第二步骤在所述时间段期间实施,在该时间段中,转速调节是激活的),检测并存储所述两个电动马达的设定力矩,并且求取所述两个电动马达的所检测的设定力矩的差,基于所述差创立带有修正值的与力矩有关的综合特征曲线。在停用转速调节之后在力矩调节期间通过修正值来修正设定力矩。
转矩通常不直接测量和调节,而是间接经由电流测量和转子位置测量和电动驱动器的模型来求取。为此,所需的传感装置经受由制造决定的以及也由老化决定的散差(Streuung)。附加地,电动驱动器或驱动马达的另外的参数可以由制造决定地变化并且附加地由于运行中的误差而改变。
通过基于在行驶期间对电动马达的校准来避免不可靠的转矩差,更准确地说一旦满足了预定的条件,可以防止由于不同的转矩或转速而产生的不稳定的行驶行为。所述校准方法在转速调节时进行,因此需要从力矩调节(标准调节)暂时切换到转速调节中。
根据本发明的措施:
1:在车辆运动期间在预定的条件下在预定的、短的时间段上切换到转速调节中,
在车辆运动期间通过控制器检查:针对切换的特定的条件是否满足。要满足的条件是:
-两个电动马达的转速是相同的,这例如在没有打滑的直线行驶中是这种情况,即Nist EM1=Nist EM2。
-车辆速度低于允许的最大车辆速度,该允许的最大车辆速度例如为30km/h或更小。车辆速度可以通过电动马达EM1和EM2的转速N确定。必须适用的是,N≤Nmax,其中,Nmax可以换算成车辆速度。最大的车辆速度Nmax可以根据所使用的电动马达或其他条件由本领域技术人员确定。
-方向盘处于直线位置中或处在例如±2度的公差范围内,其中,公差范围也可以由本领域技术人员确定。直线位置可以例如通过车辆中现有的辅助器件来支持,例如“线控转向”。
-偏航率(即围绕Z轴的车辆偏转速度)不能够超出预定的值N_z_max。该值也可以根据应用而由本领域技术人员选择并且应尽可能小。
2:经由力矩修正来修正转速差
如果针对切入转速调节的前提得到满足,则在预定的、短的时间Δt上激活转速调节。所述时间Δt又可以根据应用由本领域技术人员选择并且应处在数秒内。
可将接近当前的实际转速的值选择作为针对电动马达EM1和EM2的两个转速调节器的转速设定值Nsoll,以便确保尽可能平稳的行驶运行,而没有强烈的制动或加速并且因此使调节保持简单。可能的偏差、即准确的值又可以根据应用由本领域技术人员选择。针对修正的前提是,用于所述两个电动马达EM1和EM2的转速调节器始终是激活。由转速则确定转矩。转速调节器自动地这样调整设定力矩,使得两个电机EM1和EM2中的实际转速保持相同。在两个电机EM1和EM2完全对称的情况下、即不存在参数散差等的情况下,设定力矩(即转速调节器的输出信号)也是相同的,因为转速调节器的输出呈现为针对每个电机的设定力矩。各设定力矩的不同表明电机中存在不对称。在这种情况下,当切换到力矩调节时应修正设定力矩。为了进行修正,在转速调节激活的情况下使用两个设定力矩(即转速调节器的输出信号)的偏差。
为了执行校准,将所述两个电动马达EM1和EM2的两个转速调节器的输出、即Msoll_EM1_N_Regler和Msoll_EM2_N_Regler存储在控制器1中。
此外,求取来自电动马达EM1和EM2的两个转速调节器的所述设定力矩的差:ΔMsoll=Msoll_EM1_N_Regler-Msoll_EM2_N_Regler。
如果在转速调节器之间存在差异,则这表明传感装置和/或结构部件的精度散差,该精度散差应被修正。
基于多个经存储的设定力矩值,在转速调节阶段期间创立带有修正值ΔMsoll(Msoll)的与力矩有关的综合特征曲线或特征线。在此,储存针对每个电动马达EM1或EM2的设定力矩Msoll的修正值并且在停用转速调节之后、即在力矩调节期间将所述修正值用于进行修正。
在综合特征曲线中存储的修正值ΔMsoll(Msoll)在力矩调节期间可持续被加到力矩调节的设定力矩值Msoll_EM1和Msoll_EM2上,以便平衡硬件的精度散差。
如果已经过了时间段Δt,即当又从转速调节切换到力矩调节时,则也结束修正值的所描述的汇总处理,因为由此校准也结束。
此外,可以限制校准的激活频率。所述激活可以例如限制于在预定的时间段内、例如一天内的激活。因为修正综合特征曲线也应是与力矩有关的,因此在设定力矩不同的情况下必须激活转速调节。每天激活一次(例如在冷马达的情况下以及在热马达的情况下)在第一步骤中是足够的。但所述激活只能在激活条件被满足时才发生。
本发明以用于在机动车中对在两个单个被驱动的车轮(即在一个车轴上带有两个电动马达)之间的设定力矩偏差进行校准的方案的形式提供了用于在没有昂贵的传感装置和制造方法的情况下成本有利地处理带有电动的单个车轮驱动器的车辆中的转矩差的可行方案。所述方案使得能够在车辆的运行期间执行根据本发明所限定的校准,并且因此能够防止行驶行为由于所述两个电动马达的设定力矩的偏差而变得不稳定。
附图说明
本发明的实施例在附图中示出并且在下面详细描述。附图中:
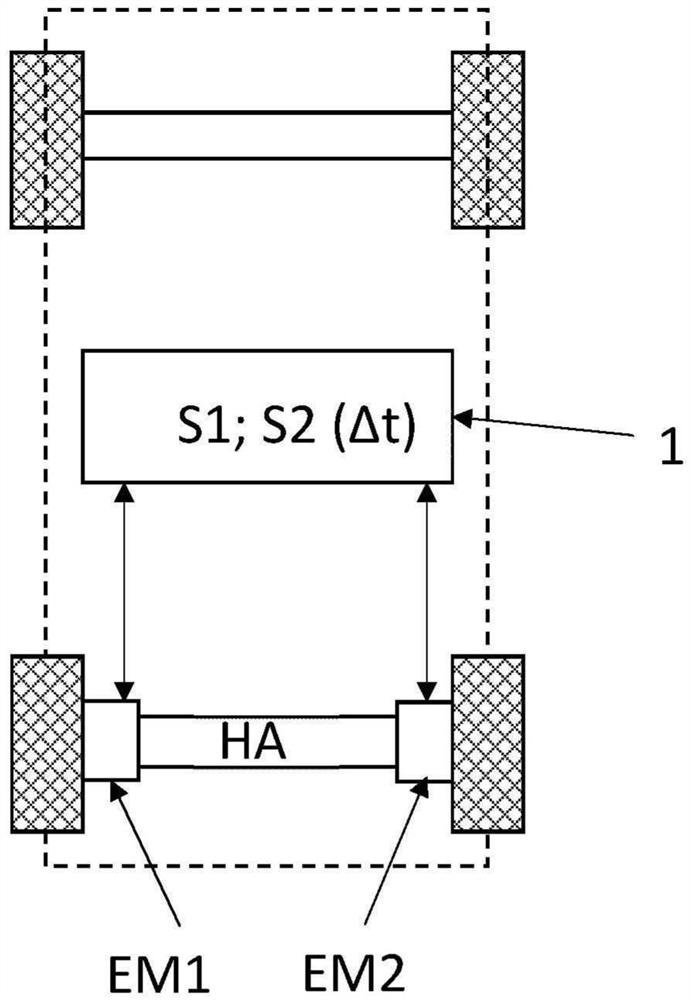
图1以示意图示出根据本发明的实施方案在单车轴驱动的情况下本发明的重要部件的总览图,
图2示出根据本发明的实施方案的校准的流程图。
具体实施方式
在图1中示出单车轴被驱动的机动车,该机动车具有用于在后车轴HA上进行单个车轮驱动的左侧的第一电动马达EM1,并且具有用于在后车轴HA上进行单个车轮驱动的右侧的第二电动马达EM2。替代地,经由前车轴运行的车辆或全轮驱动车辆也可以设有本发明,因为本发明的目的在于独立于在车辆上的安放的、两个布置在一个车轴上的电动马达EM1和EM2。根据图1的车辆是道路耦合的混合动力车辆或电动车辆。该车辆具有至少一个电子的控制单元1,该控制单元尤其是作为马达控制器或处于马达控制器中。控制单元1例如通过相应编程的功能模块(计算机程序产品)这样设计,使得因此以下根据本发明的方法(该方法在图2中作为流程图示出)能够在行驶期间执行:
在第一步骤S1中,通过控制器1检查:在车辆运动期间是否能够在预定的条件下在预定的、短的时间段上切换到转速调节中。
要满足的条件是:
-S11:两个电动马达EM1和EM2的当前所检测的转速是相同的,在没有打滑的直线行驶中是这种情况的,即Nist_EM1=Nist_EM2。
-S12:车辆速度低于允许的最大车辆速度,该允许的最大车辆速度例如为30km/h或更小。车辆速度可以通过电动马达EM1和EM2的转速N确定。必须适用的是,N≤Nmax,其中,Nmax可以由车辆速度确定,反之亦然。最大的车辆速度可以根据所使用的电动马达EM1和EM2或其他条件由本领域技术人员确定。
-S13:方向盘处于直线位置中或处在例如±2度的公差范围内,其中,公差范围也可以由本领域技术人员确定。直线位置可以例如通过车辆中现有的辅助器件来支持,例如“线控转向”。
-S14:偏航率(即围绕Z轴的车辆偏转速度)不能够超出预定的值N_z_max。该值也可以根据应用而由本领域技术人员选择并且应尽可能小。
如果所有条件都满足(是),则执行第二步骤S2,即实际的校准。为此,在预定的、短的时间Δt上激活转速调节。在该时间Δt期间求取在第一电动马达的设定力矩和第二电动马达的设定力之间矩的差:ΔMsoll=Msoll_EM1_N_Regler-Msoll_EM2_N_Regler。基于该差值创立综合特征曲线或特征线,所述综合特征曲线或特征线基于当前的设定力矩而预定修正值ΔMsoll(Msoll)。在此之后结束校准,并且可以再次转变至力矩调节。在力矩调节期间,将修正值ΔMsoll(Msoll)分别加到所述两个电动马达Msoll_EM1和Msoll_EM2的设定力矩上。
如果条件不满足(否),则重新执行步骤S1,即一直不激活转速调节并且因此一直不激活校准,直至又满足所有条件S11-S14。
- 用于在双车轴的机动车中对两个布置在一个车轴上的电动马达进行校准的装置
- 机动车轴和用于制造机动车轴的横梁的方法