一种履带式搬运机器人
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及一种机器人装置。具体的,涉及一种可自主移动并能自主跨越障碍的一种履带式搬运机器人。
背景技术
随着我国科技的
发明内容
本发明的目的是研制一种兼具高行进效率和高通过性的履带式搬运机器人。
本发明的履带式搬运机器人,包括越障式履带底盘、设置于所述越障式履带底盘上的伸缩升降装置和设置于所述伸缩升降装置上的搬运爪;
所述越障式履带底盘包括车架、分设于车架两侧的两个履带装置和设置于车架上用于驱动所述履带装置运转的驱动系统;所述履带装置包括行走履带机构和设置于行走履带机构前后两侧的两越障履带机构;所述行走履带机构包括两行走履带轮和连接于两行走履带轮之间的行走履带;所述越障履带机构包括履带安装架、安装于所述履带安装架上的两个越障履带轮和连接于两越障履带轮之间的越障履带;所述越障履带机构的其中一个越障履带轮与行走履带轮同轴连接;
所述驱动系统包括用于驱动行走履带轮转动的行走驱动机构和用于驱动越障履带机构的履带安装架整体转动的越障驱动机构。
进一步,所述行走驱动机构包括两个安装于车架的行走驱动电机;每一所述行走驱动电机通过两个带传动机构将动力传递至所述行走履带轮的轮轴;所述越障驱动机构包括四个安装于车架的越障驱动电机、通过滚针轴承支承于轮轴外并与履带安装架一一对应相互固定的轴套和用于将越障驱动电机的动力传递至所述轴套的蜗轮蜗杆减速器。
进一步,所述伸缩升降装置包括剪叉式升降机构、安装于所述剪叉式升降机构上的升降平台、设置于升降平台上的伸缩臂和固定于伸缩臂外端的夹爪安装座;所述车架上设有用于推动剪叉式升降机构升降的滚珠丝杠副Ⅰ和用于驱动滚珠丝杠副Ⅰ的丝杠转动的升降驱动电机;所述升降平台上设有用于推动伸缩臂水平滑动的滚珠丝杠副Ⅱ和用于驱动滚珠丝杠副Ⅱ的丝杠转动的伸缩驱动电机;所述夹爪安装座上设有用于驱动搬运爪旋转的旋转电机。
进一步,所述搬运爪包括手掌座、安装于手掌座的四个手指组件和用于驱动手指组件动作的手指驱动机构;所述手指组件包括手指体和铰接于手指体与手掌座之间的两个连杆,所述手指体、手掌座和两连杆共同形成平行四边形连杆机构;所述手指驱动机构包括井字形的螺母滑块、一一对应铰接于各手指组件的其中一个连杆和螺母滑块之间的推杆、与所述螺母滑块配合的丝杠和用于驱动丝杠转动的手指驱动电机。
进一步,所述蜗轮蜗杆减速器的动力通过锥齿轮副传递至所述轴套;所述锥齿轮副包括固定安装于轴套的锥齿盘和同轴固定于蜗轮的锥齿轮。
进一步,所述行走驱动电机的输出轴固定安装有双联带轮,通过双联带轮将动力分别传递至车架同侧的两个行走履带轮。
进一步,所述升降平台上设有两直线导轨;两直线导轨上横担有滑台;所述伸缩杆内端固定于所述滑台。
本发明的有益效果:本发明的履带式搬运机器人,搭载越障式履带底盘,该底盘的履带装置包括行走履带机构和设置于行走履带机构前后两侧的两越障履带机构;行走履带机构可采用现有的履带装置结构,其固定安装与车架两侧,而越障履带机构可以绕着行走履带机构的履带轮轴线整体转动,使越障履带机构具有腿式行走机构的特点,能够跨越较高的台阶;无需越障时,可仅由行走履带机构实现行进,从而使本机器人同时具备履带式机器人的行进效率和腿式机器人的越障能力;另一方面,本搬运机器人的搬运爪设置在伸缩升降装置上,进而大大增加了搬运爪的抓取范围,提高了机器人搬运作业的灵活性。
附图说明
下面结合附图和实施例对本发明作进一步描述。
图1为本发明的主视图;
图2为本发明的越障式底盘的结构示意图;
图3为本发明的轮轴与轴套的配合示意图;
图4为本发明的伸缩升降装置的轴测图;
图5为本发明的搬运爪的轴测图。
具体实施方式
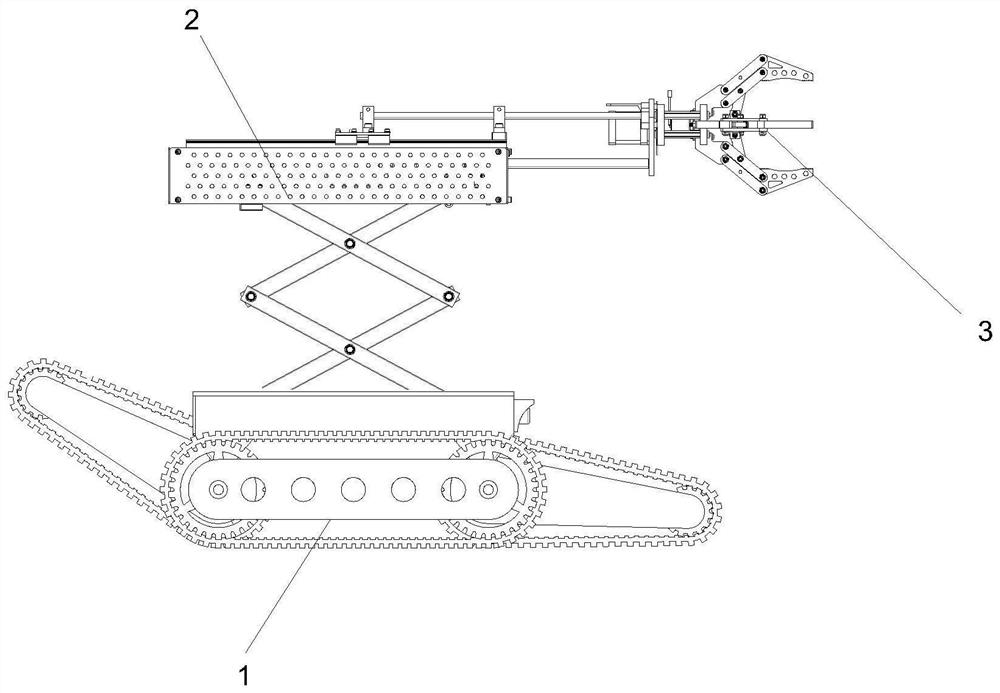
如图1所示,本实施例的履带式搬运机器人,包括越障式履带底盘、设置于所述越障式履带底盘上的伸缩升降装置2和设置于所述伸缩升降装置2上的搬运爪3;
如图2所示,所述越障式履带底盘包括车架、分设于车架两侧的两个履带装置1和设置于车架上用于驱动所述履带装置1运转的驱动系统;每一个所述履带装置1均包括行走履带机构11和设置于行走履带机构11前后两侧的两越障履带机构12;如图2所示,行走履带机构11靠外侧设置,而越障履带机构12靠内侧设置;所述行走履带机构11包括两行走履带轮和连接于两行走履带轮之间的行走履带;所述越障履带机构12包括履带安装架13、安装于所述履带安装架13上的两个越障履带轮和连接于两越障履带轮之间的越障履带;所述越障履带机构12的其中一个越障履带轮与行走履带轮同轴连接;越障履带轮的直径小于行走履带轮的直径;机器人在平摊路面行走时,仅由行走履带与地面接触实现行进,越障履带机构12不工作;当机器人需要跨越较高的台阶或障碍物时,可驱动越障履带机构12整体转动,实现腿式行走,从而跨越障碍物;当机器人需要爬坡或者行走履带与地面的附着力不足时,可驱动越障履带机构12整体转动至使越障履带与地面接触,行走履带轮和越障履带轮同时运转,可大大增强其通过性能。
如图2所示,所述驱动系统包括用于驱动行走履带轮转动的行走驱动机构和用于驱动越障履带机构12的履带安装架13整体转动的越障驱动机构。所述行走驱动机构包括两个安装于车架的行走驱动电机14;每一行走驱动电机14的输出轴固定安装有双联带轮18(即两个带轮同轴),通过双联带轮18将动力分别传递至车架同侧的两个行走履带轮,以驱动车架同侧的两个行走履带轮和越障履带轮能够同步转动;如图3所示,轮轴114具有一花键段,通过该花键段同时与行走履带轮和越障履带轮配合;两行走驱动电机14布置在车架中部,有利于提高车辆的稳定性。
所述越障驱动机构包括四个安装于车架的越障驱动电机17、通过滚针轴承支承于轮轴114外并与履带安装架13一一对应相互固定的轴套112和用于将越障驱动电机17的动力传递至所述轴套112的蜗轮蜗杆减速器15;如图2所示,四个越障驱动电机17、蜗轮蜗杆减速器15与越障履带机构12一一对应;越障驱动电机17输出的动力依次通过蜗杆-蜗轮-锥齿轮副16(锥齿轮和锥齿盘111)传递至轴套112;如图3,轴套112上固定有驱动盘113,该驱动盘113通过螺栓固定连接于越障履带机构12的履带安装架13;从而可驱动履带安装架13整体转动进而跨越障碍物;由于蜗轮蜗杆机构具有反向自锁的特性,越障驱动电机17可以根据需求适应性的调整越障履带机构12的俯仰角度,调整完毕后利用自锁特性保持该角度。
所述伸缩升降装置2包括剪叉式升降机构24、安装于所述剪叉式升降机构24上的升降平台25、设置于升降平台25上的伸缩臂28和固定于伸缩臂28外端的夹爪安装座29;所述车架上设有用于推动剪叉式升降机构24升降的滚珠丝杠副Ⅰ和用于驱动滚珠丝杠副Ⅰ的丝杠转动的升降驱动电机23;所述升降平台25上设有用于推动伸缩臂28水平滑动的滚珠丝杠副Ⅱ和用于驱动滚珠丝杠副Ⅱ的丝杠转动的伸缩驱动电机;所述夹爪安装座29上设有用于驱动搬运爪3旋转的旋转电机210;当升降驱动电机23驱动滚珠丝杠副Ⅰ的丝杠转动时,与该丝杠配合的螺母将沿轴向往复滑动,从而推动剪叉式升降机构24的一侧的两个脚平移,使剪叉式升降机构24展开或折叠,进而带动升降平台25升降;所述升降平台25上设有两直线导轨26;两直线导轨26上横担有滑台27;所述伸缩杆内端固定于所述滑台27;当伸缩驱动电机驱动滚珠丝杠副Ⅱ的丝杠转动时,与之配合的螺母将带动滑台27沿轴向往复滑动,进而带动伸缩臂28沿水平方向平动实现搬运爪3的伸缩。夹爪安装座29上的旋转电机210(优选蜗轮蜗杆减速电机)的输出轴可连接搬运爪3,实现搬运爪3的整体旋转。
如图5所示,所述搬运爪3包括手掌座32、安装于手掌座32的四个手指组件和用于驱动手指组件动作的手指驱动机构;所述手指组件包括手指体35和铰接于手指体35与手掌座32之间的两个连杆34,所述手指体35、手掌座32和两连杆34共同形成平行四边形连杆机构;所述手指驱动机构包括井字形的螺母滑块36、一一对应铰接于各手指组件的其中一个连杆34和螺母滑块36之间的推杆、与所述螺母滑块36配合的丝杠33和用于驱动丝杠转动的手指驱动电机31;手指驱动电机31可带动丝杠33旋转,与之配合的井字形的螺母滑块36相应发生往复平动,在其平动过程通过通过推杆带动平行四边形连杆机构的手指组件同步动作,实现物品的抓取和放松。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种履带式搬运机器人
- 一种新型的履带式行走搬运机器人